Изобретение относится к подвижной радиотелефонной связи и может использоваться при организации сотовых сетей подвижной связи.
Известна система сотовой подвижной связи GSM (Громаков Ю.А. Стандарты и системы подвижной радиосвязи, технологии электронных коммуникаций. Т. 67.-М. : 1996, с. 87-106).
Основными элементами системы GSM являются подсистема коммутации, содержащая центр коммутации подвижной связи, систему базовых станций, включающую контроллеры базовых станций, приемопередатчики базовых станций и подвижные станции абонентов.
Центр коммутации подвижной связи обеспечивает управление системой подвижной связи, все виды соединений для подвижных станций абонентов и интерфейс с телефонной сетью общего пользования.
Контроллеры базовых станций подключаются к центру коммутации подвижной связи по А-интерфейсу и обеспечивают управление группой приемопередатчиков базовых станций.
Приемопередатчики базовых станций подключаются контроллерам базовых станций по Abis-интерфейсу и обеспечивают радиосвязь с подвижными станциями абонентов в своих сотах.
Сеть приемопередатчиков станций покрывает радиосвязью определенную территорию, обслуживаемую одним центром коммутации подвижной связи. В Российской Федерации - это территория области или региона с размещением центра коммутации подвижной связи в административном центре.
Недостатком системы GSM является то, что она не обеспечивает возможности непосредственного подключения к телефонной сети общего пользования на местном уровне для удаленных зон обслуживаемой территории.
Наиболее близким аналогом к предлагаемому изобретению является система сотовой подвижной радиосвязи NMT (Громаков Ю.А. Стандарты и системы подвижной радиосвязи. Технологии электронных коммуникаций. Т. 67. - М.: 1996, с.67-75).
В состав сети NMT входят центр коммутации подвижной связи, базовые станции и подвижные станции абонентов.
Центр коммутации подвижной связи обеспечивает управление системой подвижной связи и интерфейс с телефонной сетью общего пользования.
Базовые станции подключаются по каналам связи к центру коммутации подвижной связи и обеспечивают радиосвязь с подвижными станциями.
Территория, на которой одна базовая станция обеспечивает радиосвязь, называется сотой. Сеть базовых станций, подключенная к конкретному центру коммутации подвижной связи, покрывает радиосвязью определенную территорию, обслуживаемую этим центром коммутации подвижной связи.
Система обеспечивает непрерывность связи и доступность для подвижных станций на всей обслуживаемой территории.
Обычно таковой является территория области или региона с размещением центра коммутации подвижной связи в административном центре, а базовые станции размещаются в населенных пунктах, вдоль автотрасс, в местах отдыха и т. п.
Достаточно часто одна или группа базовых станций обслуживают существенно удаленную от центра коммутации подвижной связи географическую зону - город, район или даже другой областной центр.
Недостатком системы NMT является то, что она не обеспечивает возможности непосредственного подключения к телефонной сети общего пользования на местном уровне для удаленных зон обслуживаемой территории.
Следствием этого недостатка являются:
- плохое качество связи между подвижными абонентами в удаленной зоне и абонентами местной АТС за счет большой протяженности каналов;
- недоступность подвижных станций абонентов со стороны абонентов местной АТС, не имеющих доступа к междугородной связи (таксофоны, учрежденческие АТС и т.д.);
- необходимость использования большого количества междугородных каналов от центра коммутации подвижной связи до удаленных зон;
- использование междугородной связи при соединениях между подвижными абонентами в удаленных зонах и абонентами местной АТС.
Обеспечение возможности непосредственного подключения к телефонной сети общего пользования на местном уровне для удаленных зон обслуживаемой территории достигается тем, что в систему сотовой подвижной связи введены контроллеры зоновой связи, которые включены между центром коммутации подвижной связи и базовыми станциями и имеют интерфейс для подключения к телефонной сети общего пользования.
Анализ известных технических решений показал, что указанные отличия являются существенными.
На рисунке представлена структура предлагаемой системы сотовой подвижной связи (ССПС).
В состав сети ССПС входят центр коммутации подвижной связи (ЦКПС) 1, имеющий интерфейс для подключения к телефонной сети общего пользования, контроллер зоновой связи (КЗС) 2, базовые станции (БС) 3, подвижные станции абонентов (ПС)4.
Система сотовой подвижной связи работает следующим образом.
ЦКПС 1 обеспечивает управление системой подвижной связи и интерфейс с телефонной сетью общего пользования (ТфОП).
К ЦКПС 1 через КЗС 2 подключаются БС 3, которые обеспечивают радиосвязь с ПС 4.
Территория, обслуживаемая одной базовой станцией, образует соту. Территория, обслуживаемая группой сопредельных БС 3, подключенных к одному КЗС 2, образует зону обслуживания этого КЗС 2. Контроллер зоновой связи обеспечивает управление подсистемой подвижной связи в пределах обслуживаемой зоны, замыкание внутренней нагрузки, интерфейс с местной автоматической телефонной станцией (АТС) ТфОП. К ЦКПС 1 контроллер 2 подключается на правах базовой станции, а вся обслуживаемая зона для ЦКПС 1 видится как одна сота. А базовые станции к КЗС 2 подключаются также, как к ЦКПС 1.
Сообщения, поступающие от ЦКПС 1, принимаются в контроллере, интерпретируются и, при необходимости, модифицированные сообщения поступают к наружным БС 3 и ПС 4. И, наоборот, сообщения от БС 3 и ПС 4 принимаются и интерпретируются в КЗС 2 и, при необходимости, модифицированные сообщения отправляются в ЦКПС 1.
Подвижные станции, прописанные в КЗС 2, имеют два абонентских номера.
Первый абонентский номер присваивается конкретной ПС 4 как любому абоненту ЦКПС 1, и по этому номеру он доступен на всей территории, покрытой ССПС, любому подвижному или стационарному абоненту ТфОП.
Второй абонентский номер присваивается конкретной ПС 4 как абоненту местной АТС, к которой подключается контроллер.
Предполагается целесообразным устанавливать КЗС 2 для обслуживания зон, удаленных от пункта расположения ЦКПС 1 с подключением к ТфОП в различных зонах.
При движении абонента между сотами непрерывность связи и доступность обеспечивается КЗС 2, если соты принадлежат одной зоне или ЦКПС 1, если соты не принадлежат одной зоне.
Исходящие вызовы от ПС 4 в зоне КЗС 2 проходят следующим образом:
- Вызов от ПС 4 в зоне КЗС 2 к ПС 4
В этом случае КЗС 2 по номеру вызываемого подвижного абонента определяет, доступен ли он в обслуживаемой зоне, если "да" - выполняет вызов через соответствующую БС 3 и осуществляет коммутацию для разговора. Для внутреннего соединения не требуется участие ЦКПС 1 и соответственно не используются каналы связи до ЦКПС 1 и обратно, как в других системах сотовой связи. Если вызываемый подвижной абонент находится вне зоны, КЗС 2 транслирует вызов в сторону ЦКПС 1. После того, как ЦКПС 1 установило соединение с вызываемым абонентом, осуществляется разговор.
- Вызов от ПС 4 в зоне КЗС 2 к абоненту местной АТС
В этом случае КЗС 2 при номеру вызываемого стационарного абонента определяет, что вызов направлен к абоненту местной АТС, и выполняет вызов соответствующего абонента по соединительным линиям с АТС, при успешном завершении вызова устанавливается соединение для разговора, такой вид соединения возможен только в системе с контроллером зоновой связи, обеспечивающим подключение к ТфОП на местном уровне.
- Вызов от ПС 4 в зоне КЗС 2 к абоненту ТфОП
Если по номеру вызываемого стационарного абонента определено, что это не абонент местной АТС, то КЗС 2 выполняет трансляцию вызова к ЦКПС 1, который передает вызов в ТфОП для дальнейшего установления соединения.
В общем случае любой абонент может быть доступен как через местную АТС, так и через сеть общего пользования в точке подключения ЦКПС 1. Конкретный вариант будет определяться административными решениями и принятой системой нумерации.
Входящие вызовы к ПС 4 в зоне КЗС 2 осуществляются следующим образом:
В зоне КЗС 2 могут находиться два типа абонентов. Это абоненты КЗС 2 и абоненты ЦКПС 1, не являющиеся абонентами данной КЗС 2. Абоненты обоих типов доступны через ЦКПС 1 по номеру в сети ССПС.
Это случай, когда от ЦКПС 1 поступает вызов ПС 4 в КЗС 2.
КЗС 2 транслирует вызов в обслуживаемой зоне и устанавливает соедиение через соты БС 3 нахождения абонента.
Абоненты КЗС 2 доступны еще и как абоненты местной АТС. Для этого они имеют вторую нумерацию в качестве абонентов местной АТС.
В этом случае вызов поступает через местную АТС к КЗС 2.
КЗС 2 выполняет вызов абонента в своей зоне и при успешном завершении устанавливает соединение. Если абонент находится вне зоны КЗС 2, вызов транслируется на ЦКПС 1 для дальнейшего поиска абонента и установления соединения.
Включение в сеть ССПС контроллера зоновой связи по предлагаемой схеме позволяет получить новый существенный признак: коммутацию абонентов и подключение к сети ТфОП на местном уровне, что приводит к улучшению качества связи, сокращению количества используемых каналов в сети и делает подвижных абонентов более доступными для стационарных абонентов.
Реализовать контроллер зоновой связи можно различными способами. Примером реализации контроллера зоновой связи может быть контроллер базовых станций КБС 124/NMT.
КБС 24/NMT представляет собой комплекс программно-аппаратных средств и состоит из двух блоков - блока радиоинтерфейсов и блока коммутации.
Блок коммутации содержит комплексы соединительных линий для подключения к АТС и коммутатор 8х8 ИКМ-трактов, работающий под управлением микроЭВМ на базе процессора 1810ВМ85.
Блок радиоинтерфейсов содержит управляющую ЭВМ, устройства преобразования сигналов и четырехпроводные аналоговые стыки.
Блок радиоинтерфейсов содержит управляющую ЭВМ, устройства преобразования сигналов и четырехпроводные аналоговые стыки. Управляющая ЭВМ выполняет функции управления подвижностью, управления радиосистемой, обработку протоколов на интерфейсах с базовыми станциями и центром коммутации подвижной связи.
Управляющая ЭВМ реализуется на базе процессора 1810ВМ86. Устройства преобразования обеспечивают передачу сигнализации со скоростью 1200 бит/с и реализованы на цифровых процессорах обработки сигналов TMS320C25. Четырехпроводные аналоговые стыки обеспечивают подключение базовых станций и центра коммутации подвижной связи.
Имеются интерфейсы RS232 для подключения ПЭВМ технической эксплуатации. В КБС 24/NMT реализованы протоколы интерфейсов системы NMN-450.
Экономическую целесообразность в построении сотовой системы подвижной связи согласно предлагаемому изобретению можно рассмотреть на примере использования КБС 24/NMT в г. Сызрань Самарской области.
Коммутационный центр подвижной связи сотовой системы NMT-450 Самарской области расположен в городе Самара. В г. Сызрань предполагается установка базовой станции на восемь радиоканалов. При этом затраты капитальные, эксплуатационные и за аренду каналов Сызрань - Самара в один год составляют 189,5 тысяч долларов. Если в г. Сызрань установить КБС 24/NMT, увеличатся капитальные затраты, но уменьшится плата за аренду каналов и результат почти не меняется - 187,5 тысяч долларов. Следует отметить, что местные звонки составляют 85%. В последующие годы затраты при использовании КБС 24/NMT уменьшатся со 119,5 тысяч долларов до 37,5 тысяч долларов.
Таким образом, введение в систему сотовой подвижной связи контроллера зоновой связи дает существенный экономический эффект. При этом не был учтен косвенный экономический эффект за счет улучшения потребительских качеств системы.
Изобретение относится к подвижной радиотелефонной связи и может использоваться при организации сотовых сетей подвижной связи. Технический результат - обеспечение возможности непосредственного подключения к телефонной сети общего пользования на местном уровне для удаленных зон обслуживаемой территории - достигается тем, что в систему сотовой подвижной связи введены контроллеры зоновой связи, которые включены между центром коммутации подвижной связи и базовыми станциями и имеют интерфейс для подключения к телефонной сети общего пользования. 1. ил.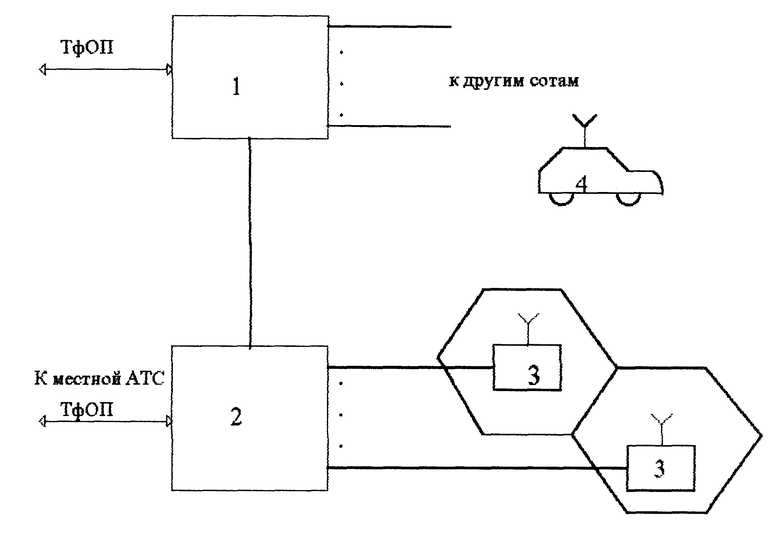
Система сотовой подвижной связи, содержащая центр коммутации подвижной связи, имеющий интерфейс для подключения к телефонной сети общего пользования, базовые станции, которые подключены к центру коммутации подвижной связи, и подвижные станции абонентов, имеющие радиодоступ к системе через базовые станции, отличающаяся тем, что в нее введены контроллеры зоновой связи, которые включены между центром коммутации подвижной связи и базовыми станциями и имеют интерфейс для подключения к телефонной сети общего пользования.
| Громаков Ю.А | |||
| Стандарты и системы подвижной радиосвязи | |||
| Технологии электронных коммуникаций | |||
| Приспособление для получения кинематографических стерео снимков | 1919 |
|
SU67A1 |
| US 5506837 A, 09.04.96 | |||
| US 5212684 A, 18.05.93 | |||
| US 5412659 A, 08.05.95 | |||
| US 5442805 A, 15.08.95 | |||
| US 5493694 A, 20.02.96 | |||
| US 5517491 A, 14.05.96. | |||

