Изобретение относится к устройствам, повышающим эффективность динамической воздушной подушки транспортного средства, образуемой путем поддува под несущую поверхность (крыло) струй от воздушного движителя, и может быть использовано в транспортных средствах, использующих для аэродинамической разгрузки поддув как на взлетно-посадочных, так и на крейсерских режимах движения и на рулении.
Из уровня техники известна механизация несущей поверхности транспортных средств на динамической воздушной подушке (в дальнейшем называемая механизацией динамической воздушной подушки транспортных средств), таких как экранопланы, экранолеты, самолеты укороченного взлета и посадки, аппараты на воздушной подушке (в том числе скегового типа и др.), основанная на поддуве струй газа от воздушного движителя под несущую поверхность (крыло, камеру воздушной подушки).
В описании изобретения к патенту РФ 2057664, C1, МПК B 60 V 1/08, 3/08, опублик. 10.04.96 (1), представлен аппарат на динамической воздушной подушке скегового типа, в котором имеется механизация динамической воздушной подушки, содержащая крыло, установленный перед крылом по меньшей мере один воздушный движитель, соединенный с двигателем, устройство направления потока под крыло, включающее щиток, расположенный на передней кромке крыла, и средство наклона струи газа за воздушным движителем, выполненное в виде отклоняемых козырьков. В соответствии с изобретением (1) двигатели установлены на расположенном перед крылом пилоне и совмещены с воздушными движителями (соплами двигателей), что приводит к увеличению разноса масс и, следовательно, повышению моментов инерции относительно поперечной оси. При размещении пилона на малом расстоянии от передней кромки крыла происходит возрастание потерь напора струи за воздушным движителем при взаимодействии со щитком на передней кромке крыла и возрастание скорости потока, что при взаимодействии с опорной водной поверхностью образует каверну, вызывает интенсивное брызгообразование, и приводит к уменьшению подъемной силы и увеличению сопротивления транспортного средства.
Таким образом, в предлагаемом в изобретении (1) размещении пилона с двигателями перед крылом имеется ограничение на расстояние между воздушными движителями и передней кромкой крыла, что обуславливает существенный разнос масс и, следовательно, ухудшение устойчивости (уменьшение коэффициента затухания продольных колебаний аппарата). Это является недостатком представленного в изобретении (1) аппарата и механизации динамической воздушной подушки.
В описании изобретения по патенту РФ 2057040, C1, МПК B 60 V 1/08, опублик. 27.03.96 (2), представлен амфибийный аппарат на воздушной подушке, механизация динамической воздушной подушки которого содержит крыло, установленный в носовой части крыла по меньшей мере один воздушный движитель, соединенный с двигателем, устройство направления потока под крыло, включающее щиток с приводом, канал в носовой части крыла, торцы которого находятся на верхней и нижней поверхностях крыла, причем щиток выполнен в виде по меньшей мере одной створки, обеспечивающей с помощью привода открывание и закрывание торцов канала. В соответствии с изобретением (2) двигатели с движителями размещены над крылом, что делает необходимым выполнение устройства направления потока под крыло в виде заслонки, которая поворачивается вверх относительно оси, расположенной на задней стенке канала. При этом часть струи газа за воздушным движителем направляется под крыло для создания динамической воздушной подушки, а другая часть струи обеспечивает создание тяги, разгоняющей транспортное средство до скорости, достаточной для создания аэродинамической подъемной силы, обеспечивающей полет аппарата.
Однако подъем заслонки над крылом приводит к увеличению аэродинамического сопротивления и уменьшению аэродинамической подъемной силы при движении аппарата вследствие затенения заслонкой несущей поверхности крыла, а использование только части реактивной силы струи для создания тяги уменьшает как горизонтальную составляющую располагаемой тяги, так и вертикальную силу при поддуве. В результате увеличивается продолжительность разгона и дистанция выхода на крейсерский режим полета, что обуславливает увеличение расхода топлива на взлет и уменьшение дальности полета. Это является недостатком механизации динамической воздушной подушки аппарата, представленного в изобретении (2).
В описании изобретения к патенту ФРГ 4115254, C2, МПК B 60 V 1/08, опублик. 11.11.93, (3), принятого за наиболее близкий аналог, представлена механизация динамической воздушной подушки экраноплана, содержащая крыло, установленный перед крылом по меньшей мере один воздушный движитель, соединенный с двигателем, устройство направления потока под крыло, включающее щиток, расположенный на передней кромке крыла, и привод щитка. В соответствии с изобретением (3) воздушный движитель, выполненный в виде винта в кольце, соединен с двигателем посредством промежуточного вала. Двигатель размещен в крыле, что обеспечивает уменьшение разноса масс и момента инерции экраноплана относительно поперечной оси, а также аэродинамического сопротивления. Однако наличие промежуточного вала обуславливает установку воздушного движителя на небольшом расстоянии от передней кромки крыла. Для направления струи газа за воздушным движителем под крыло и создания динамической воздушной подушки (поддува) в изобретении (3) предложено отклонять установленный в носовой части крыла щиток до касания с козырьком, сопряженным с кольцом винта. При этом практически весь щиток (при соприкосновении отклоненного щитка с козырьком) или часть потока направляется под крыло и используется для создания динамической воздушной подушки, а горизонтальная тяга создается только частью струи, идущей поверх козырька, и реактивной силой вытекающего из-под крыла газа, импульс которой в связи с потерями напора заметно меньше импульса струи газа непосредственно за воздушным движителем. Кроме того, отклоненный вверх щиток уменьшает аэродинамическую подъемную силу крыла вследствие затенения верхней поверхности крыла за щитком и в то же время увеличивает аэродинамическое сопротивление. Как и в изобретении (2), в результате увеличивается время и дистанция выхода на крейсерский режим движения, повышается расход топлива на взлет и уменьшается дальность полета экраноплана. Это является недостатком изобретения и обусловлено использованием механизации динамической воздушной подушки по изобретению (3).
Решаемой технической задачей изобретения является создание динамической воздушной подушки при поддуве под крыло при уменьшении потерь импульса тяги и увеличении горизонтальной составляющей тяги воздушного движителя.
Технический результат изобретения заключается в уменьшении потерь импульса струи, направляемой воздушным движителем под крыло при ограниченном угле поворота воздушного движителя и его близкого размещения от передней кромки крыла, обусловленного пылебрызгообразованием при взаимодействии струи с опорной поверхностью. Технический результат также заключается в увеличении аэродинамического качества крыла (и транспортного средства) во взлетно-посадочной конфигурации.
Сущность изобретения заключается в следующем.
Механизация динамической воздушной подушки транспортного средства, как и в наиболее близком аналоге (3), содержит крыло, установленный перед крылом по меньшей мере один воздушный движитель, соединенный с двигателем, устройство направления потока под крыло, включающее щиток, расположенный на передней кромке крыла, и привод перемещения щитка, но в отличие от наиболее близкого аналога (3) устройство направления потока под крыло дополнительно содержит средство наклона струи газа по меньшей мере за одним воздушным движителем, а также канал в носовой части крыла, средство наклона струи газа за воздушным движителем содержит ось поворота, расположенную перед крылом, и привод перемещения средства наклона струи, торцы канала в носовой части крыла находятся на верхней и нижней поверхностях крыла со смещением торца на нижней поверхности назад, щиток выполнен в виде по меньшей мере одной створки, обеспечивающей с помощью привода открывание и закрывание торцов канала.
Механизация динамической воздушной подушки транспортного средства характеризуется тем, что механизмы приводов перемещения створок и средства наклона струи газа выполнены с возможностью кинематической связи между собой, кинематическая связь механизмов приводов средства наклона струи газа за воздушным движителем и перемещения створок включает качалку, ось поворота которой закреплена на корпусе транспортного средства, одно плечо качалки соединено с рычагом поворота средства наклона струи газа за воздушным движителем, а другое плечо качалки выполнено с возможностью соединения посредством тяг с механизмом перемещения створок.
Механизация динамической воздушной подушки транспортного средства характеризуется также тем, что створки выполнены в виде панелей, размещенных на верхней и нижней поверхностях крыла, причем на верхней и нижней поверхностях крыла, размещено по меньшей мере по одной панели, механизм привода перемещения створок выполнен в виде размещенной на каждой панели качалки, ось которой установлена на крыле транспортного средства, одно плечо соединено со створкой, а другое - с тягой качалки механизма привода средства наклона струи газа за воздушным движителем, а энергопривод выполнен общим для привода перемещения створок и привода средства наклона струи газа за воздушным движителем, содержит тягу изменяемой длины, соединенную с качалкой механизма привода средства наклона струи за воздушным движителем.
Кроме того, механизация динамической воздушной подушки транспортного средства характеризуется тем, что она оснащена направляющими, створки выполнены в виде панелей, размещенных на верхней и нижней поверхностях крыла, и оснащены элементами, взаимодействующими с направляющими, механизм привода перемещения панелей выполнен в виде качалки, ось которой установлена на крыле транспортного средства, два плеча качалки выполнены раздвижными и соединены с верхней и нижней панелями, а третье плечо соединено тягой с плечом качалки механизма привода средства наклона струи газа за воздушным движителем.
Механизация динамической воздушной подушки характеризуется тем, что она оснащена направляющими, створки выполнены в виде панелей, размещенных на верхней и нижней поверхностях крыла и оснащены элементами, взаимодействующими с направляющими, механизм привода перемещения панелей выполнен в виде соединенной со створками цепной передачи, взаимодействующей со звездочками, вал одной из которых кинематически связан с энергоприводом.
Средство наклона струи газа за воздушным движителем взлетно-посадочной механизации предлагается выполнять в виде пилона, на котором установлен воздушный винт, вал вращения которого соединен с размещенным на крыле двигателем посредством промежуточного вала, сопряженного с валом винта посредством двухстепенного шарнира, пересечение осей которого расположено на оси поворота средства наклона струи газа за воздушным винтом.
Приведенные признаки взаимосвязаны между собой и являются существенными для решения технической задачи и достижения технического результата изобретения.
Размещение воздушных движителей и оси поворота средства наклона струи перед крылом, наличие канала в носовой части крыла, размещение торцов канала на верхней и нижней поверхностях крыла со смещением торца на нижней поверхности назад, и наличие перемещаемых створок, перекрывающих торцы канала, образуют совокупность признаков, необходимых и достаточных для решения технической задачи и достижения технического результата. Исключение любого из них не позволяет реализовать технический результат.
Действительно, размещение движителя перед крылом, а не над ним приводит к улучшению обтекания верхней поверхности крыла набегающим потоком при движении транспортного средства. Наличие канала в носовой части крыла, размещение торцов канала на верхней и нижней поверхностях крыла со смещением торца на нижней поверхности назад относительно торца на верхней поверхности, обеспечивает при приближении движителя к передней кромке крыла прохождение всей струи газа за воздушным движителем под крыло при уменьшении скорости в струе за счет эжекции окружающего воздуха, а также максимальное снижение потерь импульса струи путем уменьшения сопротивления за счет профилировки стенок канала. Наличие перемещаемых створок обеспечивает быстрое преобразование конфигурации крыла транспортного средства из взлетно-посадочной в крейсерскую и наоборот, и позволяет формировать поток газа за воздушным движителем внутри канала и направлять в нужное направление за каналом.
Выполнение приводов отклонения струи за воздушным движителем и перемещения створок с возможностью кинематической связи между механизмами приводов обеспечивает возможность синхронного изменения положения средства наклона струи и створок и, следовательно, регулирование величины подъемной силы при переходе от взлетно-посадочной к крейсерской конфигурации транспортного средства и наоборот.
Выполнение кинематической связи механизмов приводов средства наклона струи газа за движителем и перемещения створок, включающей качалку, ось которой закреплена на корпусе транспортного средства, одно плечо соединено с рычагом поворота средства наклона струи газа за движителем, а другое плечо выполнено с возможностью соединения посредством тяг с механизмом привода перемещения створок, обеспечивает возможность синхронного отклонения воздушного движителя и перемещение створок торцов канала при соединении плеча качалки с тягой механизма привода перемещения створок при поддуве под крыло и позволяет регулировать положение средства наклона струи за воздушным движителем независимо от положения створок при отсоединении кинематической связи качалки с тягой привода перемещения створок, например, в крейсерском режиме движения транспортного средства.
Выполнение створок в виде панелей, размещенных на верхней и нижней поверхностях крыла, причем на верхней и нижней поверхностях крыла размещено по меньшей мере по одной панели, и выполнение привода перемещения створок в виде размещенной на каждой панели качалки, ось которой соединена с крылом транспортного средства, одно плечо соединено со створкой, а другое - с тягой, соединенной с качалкой привода средства наклона струи газа за воздушным движителем, обеспечивает синхронный поворот воздушного движителя и створок при соединении плеча качалки с тягой привода перемещения створок. Наличие общего для приводов средства отклонения струи и перемещения створок энергопривода обеспечивает работу механизмов средства наклона струи и перемещения створок от одного энергопривода. Выполнение энергопривода с тягой переменной длины (например, в виде гидропривода, электромеханизма с винтовой передачей и т. п. ), соединенной с плечом качалки механизма привода средства наклона струи, обеспечивает управление средством наклона струи газа за движителем как независимо от механизма перемещения створок (при отключенной кинематической связи между ними), так и их совместное синхронное отклонение.
Выполнение механизации динамической воздушной подушки транспортного средства с крылом, оснащенной направляющими, створками в виде панелей, размещенных на верхней и нижней поверхностях крыла и оснащенных элементами, взаимодействующими с направляющими створок, а привода перемещения панелей в виде качалки, ось которой установлена на корпусе и/или крыле транспортного средства, два плеча выполнены раздвижными и соединены с верхней и нижней панелями, а третье плечо качалки соединено тягой с плечом качалки механизма привода средства наклона струи газа за воздушным движителем, обеспечивает синхронное отклонение средства наклона струи за воздушным движителем и открытие торцов канала с небольшой величиной отношения ширины канала к его строительной высоте при перемещении панелей по направляющим при соединении плеча качалки с тягой привода перемещения створок и позволяет повысить аэродинамическое качество крыла во взлетно-посадочной конфигурации в связи с уменьшением аэродинамического сопротивления крыла.
Выполнение механизации динамической воздушной подушки, оснащенной направляющими, створками в виде панелей, размещенных на верхней и нижней поверхностях крыла и оснащенных элементами, взаимодействующими с направляющими створок, а механизма привода перемещения панелей - в виде соединенной со створками передачей цепного, тросового или иного типа, взаимодействующей со звездочками (или шкивами и т.п.), вал одной из которых кинематически связан с энергоприводом, обеспечивает простоту и компактность механизма перемещения створок по направляющим.
Выполнение средства наклона струи газа за воздушным движителем в виде пилона, на котором установлен воздушный движитель, содержащий воздушный винт, вал которого соединен с размещенным в крыле двигателем посредством промежуточного вала, сопряженного с валом винта двухстепенным шарниром, пересечение осей которого лежит на оси поворота пилона средства наклона струи газа за воздушным винтом, обеспечивает поворот воздушного винта относительно двухстепенного шарнира, при котором нижняя кромка воздушного движителя, включающего винт (например, винт в кольце), удаляется от экрана и позволяет повысить аэродинамическое качество крыла (и летательного аппарата) как во взлетно-посадочной, так и в крейсерской конфигурации в связи с уменьшением аэродинамического сопротивления из-за размещения двигателей в крыле.
Сущность изобретения поясняется чертежами.
На фиг. 1 дан вид в плане транспортного средства, оборудованного предлагаемой механизацией динамической воздушной подушки.
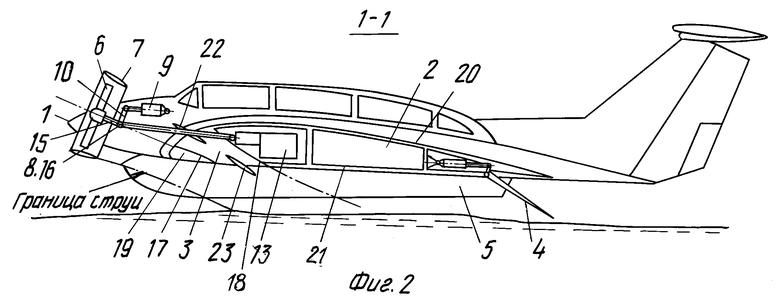
На фиг. 2 показан разрез 1-1 на фиг. 1.
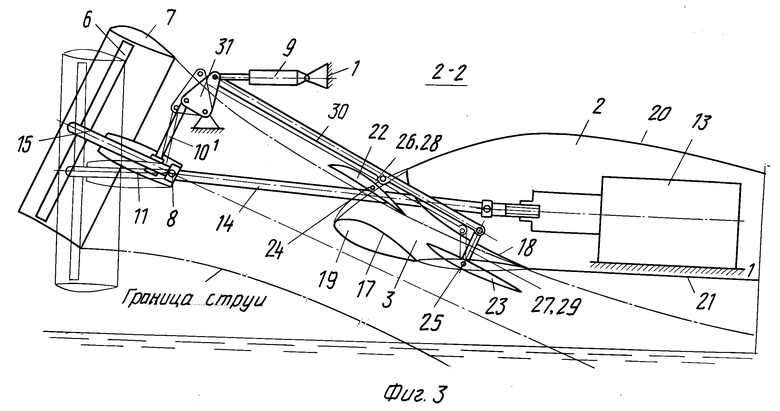
На фиг. 3 показан разрез 2-2 на фиг. 1 при выполнении створок поворотными.
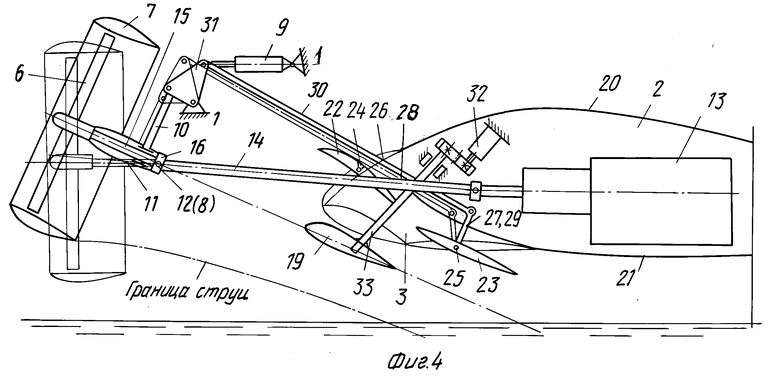
На фиг. 4 представлен механизм поворота створок с одновременным перемещением вперед носка крыла.
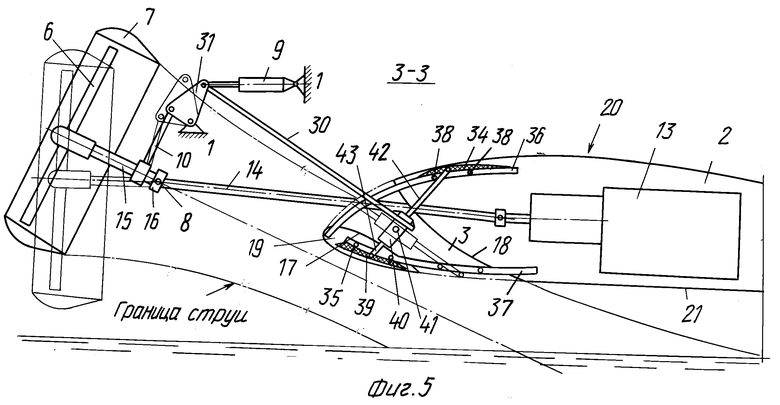
На фиг. 5 дан разрез 3-3 на фиг. 1 при выполнении створок сдвигаемыми.
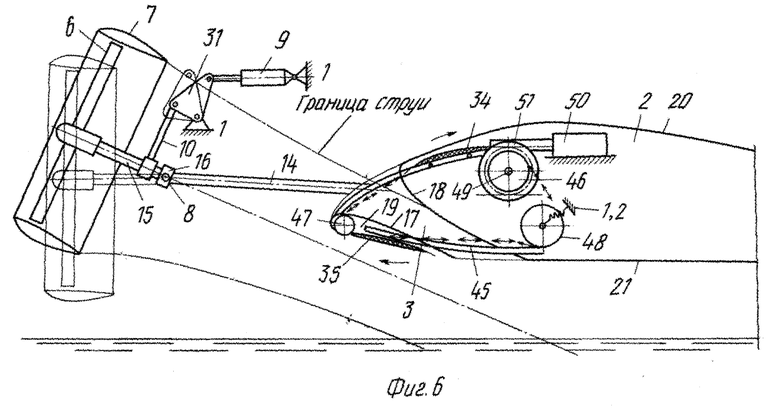
На фиг. 6 показан механизм перемещения створок посредством цепной передачи.
Механизация динамической воздушной подушки транспортного средства устроена следующим образом.
Механизация динамической воздушной подушки транспортного средства содержит корпус 1, крыло 2, воздушный движитель, установленный перед крылом 2, устройство направления потока под крыло 2, включающее щиток, установленный на передней кромке крыла 2, средство наклона струи газа за воздушным движителем, расположенным перед крылом 2, и канал 3 в носовой части крыла 2, а также приводы средства наклона струи и перемещения щитка, которые могут выполняться с возможностью кинематической связи между собой (фиг. 1).
Крыло 2 оснащено механизацией задней кромки, например, щитком 4 или закрылком и для эффективного восприятия экранного эффекта снабжено поплавками или концевыми шайбами. Крыло 2 может выполняться с отрицательным углом поперечного V по передней кромке.
В качестве воздушного движителя может использоваться сопло турбореактивного двигателя, воздушный винт 6, винт 6 в кольце 7 и т.п. На легких летательных аппаратах технический результат в наибольшей степени проявляется при использовании в качестве движителя воздушного винта 6 или винта 6 в кольце 7.
Средство отклонения струи газа за воздушным движителем, например винтом 6 в кольце 7, имеет ось 8 поворота движителя, расположенную перед крылом 2, и привод наклона струи за воздушным движителем. Привод содержит энергопривод, например гидроцилиндр 9, кинематически связанный с рычагом 10, закрепленным на оси 8 (фиг. 2).
В предпочтительном варианте выполнения механизации динамической воздушной подушки легкого экраноплана средство наклона струи газа содержит пилон 11, на котором установлен воздушный движитель, содержащий воздушный винт 6 в кольце 7, ось 12 поворота которого соединена с размещенным в крыле 2 двигателем 13 посредством промежуточного вала 14, сопряженного с валом 15 воздушного винта 6 двухстепенным шарниром 16, пересечение осей которого лежит на оси 8 поворота средства наклона струи газа за винтом 6 в кольце 7, например, оси 12 поворота пилона 11, на котором установлен винт 6 в кольце 7 (фиг. 1, 3).
Размещение канала 3 в передней части крыла позволяет выполнять его профилированным, придавая стенкам 17, 18 канала 3 и носку 19 крыла 2 форму, обеспечивающую наименьшие потери импульса струи вследствие уменьшения аэродинамического сопротивления, эжекции струей газа за воздушным движителем окружающего воздуха, а также реализации подсасывающей силы на носке 19 крыла 2. Торцы канала 3 в носовой части крыла 2 расположены на верхней 20 и нижней 21 поверхностях крыла 2 со смещением назад границ торца канала 3 на нижней поверхности 21 относительно торца на верхней поверхности 20, и перекрываются щитком, который может выполняться в виде створок 22, 23, размещенных соответственно на верхней 20 и нижней 21 поверхностях крыла 2 и соединенных с приводом их перемещения. При малой строительной высоте профиля в носовой части крыла 2 щиток может выполняться в виде одной створки (на фиг. не показано).
При выполнении механизма привода перемещения створок 22, 23 путем поворота каждая из них оснащена осью соответственно 24, 25, закрепленной на корпусе 1 и/или крыле 2 экраноплана, и связана с приводом перемещения. Механизм привода перемещения створок 22, 23 может быть выполнен в виде качалок 26, 27, оси которых совпадают с осями 24, 25, а плечи 28, 29 соединены тягой 30 с энергоприводом, например гидроцилиндром и т.п. (не показано). Оси 24, 25 могут располагаться как в средней части, так и в передней части створок 22, 23. Наиболее предпочтительным является расположение оси 24 на передней стенке 17 канала 3, а оси 25 - между стенками 17, 18 канала 3.
В предпочтительном варианте выполнения привода перемещения створок 22, 23 путем их поворота оси 24, 25 закреплены на корпусе 1 и/или на крыле 2 и совмещены с осями качалок 26, 27, плечи 28, 29 которых шарнирно соединены с тягой 30, связанной с энергоприводом. В случае использования общего энергопривода он выполнен в виде тяги переменной длины, например гидроцилиндра 9, соединен с качалкой 31 механизма наклона струи, а тяга 30 выполнена с возможностью отсоединения от качалки 31. При этом рычаг 10, закрепленный на оси 8 поворота средства наклона струи за воздушным движителем, соединен с гидроцилиндром 9 посредством качалки 31, одно плечо которой соединено с рычагом 10, а другое - с тягой 30. Механизм отсоединения тяги 30 от плеча качалки 31 может выполняться в виде фиксатора, дистанционно приводимого в действие, например, с помощью электромагнита (не показаны).
Возможно также образование канала путем перемещения вперед посредством энергопривода 32 носка 19 крыла 2 по направляющим 33, размещенным в корпусе 1 и/или крыле 2, и одновременным отклонением створок 22, 23 (фиг. 4).
Подбором параметров механизма кинематической связи привода наклона струи газа за воздушным движителем и привода перемещения створок 22, 23 можно обеспечить требуемые соотношения углов поворота средства отклонения струи за движителем, например винтом 6 в кольце 7, и створок, при котором будет обеспечено уменьшение потерь импульса струи за воздушным движителем вследствие эжекции струей воздуха, а придание соответствующей формы носку 19 крыла 2, створкам 22, 23 и стенкам 17, 18 канала 3 позволит в наибольшей степени реализовать при их взаимодействии со струей за воздушным движителем аэродинамическую подсасывающую силу. При этом форма поверхностей и геометрические параметры стенок 17, 18 канала 3, створок 22, 23 и носка 19 крыла 2 могут быть определены известными расчетными и экспериментальными методами.
При больших размерах торцов канала 3 створки 22 и 23 могут выполняться состоящими из нескольких секций как по размаху, так и по ширине канала 3 (не показано).
Примеры выполнения створок 34, 35 сдвигающимися приведены на фиг. 5, 6. Привод перемещения сдвигающихся створок 34, 35 оснащается направляющими 36, 37, которые могут располагаться в корпусе 1 и/или крыле 2, а створки 34, 35 снабжаются элементами, взаимодействующими с направляющими 36, 37, например, роликами 38, 39.
При небольшой величине отношения ширины торцов канала 3 к строительной высоте канала 3, как показано на фиг. 5, механизм перемещения створок 34, 35 может быть выполнен в виде качалки 40, ось 41 которой закреплена на корпусе 1 и/или крыле 2 транспортного средства, а плечи 42, 43 выполнены с возможностью изменения их длины (например, телескопическими) и шарнирно соединены со створками 34, 35, образуя кулисный механизм. Привод перемещения в этом случае может оснащаться собственным энергоприводом (не показан). Однако в предпочтительном варианте выполнения в качестве энергопривода механизма перемещения створок 34, 35 используется энергопривод механизма средства наклона струи газа за воздушным движителем. В этом случае рычаг 44 качалки 40 соединен с тягой 30, обеспечивающей кинематическую связь с качалкой 31 механизма наклона струи (фиг. 5).
При значительной ширине торцов канала 3 механизм перемещения створок 34, 35, расположенных на верхней 20 и нижней 21 поверхностях крыла 2, как показано на фиг.6, может выполняться в виде гибкой связи, например цепной передачи, в которой цепь 45 соединена со створками 34, 35, перемещающимися вдоль направляющих 36, 37, и взаимодействует со звездочками 46, 47, 48. Вал 49 ведущей звездочки 46, расположенной в корпусе 1 и/или в крыле 2, соединен с энергоприводом 50, например электромотором, гидромотором и т.п., посредством редуктора 51, например червячного редуктора. Ведомая звездочка 47 размещена в корпусе 1 и/или носке 19 крыла 2, а звездочка 48 выполнена подпружиненной для обеспечения натяжения цепи 45 и расположена в корпусе 1 и/или в крыле 2.
Естественно, возможно и другое выполнение приводов средства наклона струи и перемещения створок как при неподвижном, так и при перемещаемом носке 19 крыла 2. Однако описанные выше примеры выполнения являются предпочтительными при оснащении транспортных средств механизацией динамической воздушной подушки.
Механизация динамической воздушной подушки транспортного средства функционирует следующим образом.
Перед началом движения на динамической воздушной подушке механизация динамической воздушной подушки транспортного средства, например экраноплана, из крейсерской конфигурации (штрих-пунктирная линия на фиг. 3 - 6) принимает взлетно-посадочную конфигурацию, показанную на фиг. 3 - 6 сплошной линией. При этом отклоняется щиток 4 (или закрылок) крыла 2 во взлетное положение, средство отклонения струи приводится в положение, обеспечивающее наклон струи газа за воздушным движителем под заданным углом, а привод перемещения створок открывает торцы канала 3 на верхней 20 и нижней 21 поверхностях в передней части крыла 2. Затем к воздушному движителю, например к валу 15 воздушного винта 6 в кольце 7, подводится крутящий момент от двигателя 13 посредством промежуточного вала 14 и двухстепенного шарнира 16. Струя газа за воздушным движителем направляется в канал 3. При выполнении размеров торцов канала 3 превосходящими струю газа, а стенок 17, 18 канала 3 с плавными обводами в месте сопряжения с верхней 20 поверхностью крыла 2 обеспечивается эжекция (подсос) окружающего воздуха и падение скорости в струе (при увеличении расхода газа за счет эжекции). Размывание границы струи для повышения эжекции на торцах канала может осуществляться установкой турбулизаторов (не показаны), либо выдвижением створок 22 на верхней 20 поверхности крыла 2 в область границы струи. При достижении скорости, при которой аэродинамическая подъемная сила обеспечивает требуемый режим движения, начинается отклонение средства наклона струи газа в крейсерское положение, перекрываются торцы канала 3 створками 22, 23 или 34, 35, а щиток 4 крыла 2 приводится в крейсерское положение (штрих-пунктирная линия на фиг. 3 - 6).
Выполнение стенок канала 3 профилированными приводит к уменьшению аэродинамического сопротивления, в результате чего сокращаются потери импульса струи. Придание соответствующей формы поворотным створкам 22, 23 и носку 19 крыла 2 обеспечивает повышение эжекции окружающего воздуха и позволяет реализовывать аэродинамическую подсасывающую силу при их взаимодействии со струей газа за воздушным движителем, что также обеспечивает уменьшение потерь импульса струи газа.
В случае синхронизации приводов средства наклона струи и перемещения створок, например за счет кинематической связи между механизмами приводов средства отклонения струи газа за воздушным движителем и перемещения створок, происходит постепенное перекрытие торцов канала 3 с ограничением расхода струи газа, подаваемой в канал, что обеспечивает регулирование величины подъемной силы динамической воздушной подушки.
Для совершения посадки выполняется синхронное открытие торцов канала 3 и отклонение средства наклона струи газа, а также отклонение щитков 4 в посадочное положение. После принятия посадочной конфигурации механизации динамической воздушной подушки и крыла 2 осуществляется поддув с постепенным гашением скорости движения при поддержании достаточной для бесконтактного движения подъемной силы динамической воздушной подушки до полной остановки.
При использовании в качестве воздушного движителя воздушного винта 6 в кольце 7, установленных, например, на пилоне 11, они поворачиваются относительно расположенной перед крылом 2 оси 12 посредством гидроцилиндра 9, взаимодействующего с рычагом 10, соединенным с качалкой 31. Створки 22, 23 или 34, 35 могут перемещаться как собственным энергоприводом, так и общим для механизмов средства отклонения струи газа и перемещения створок энергоприводом, например гидроцилиндром 9.
При использовании общего энергопривода, что возможно при наличии кинематической связи между механизмами приводов средства отклонения струи газа и перемещения створок 22, 23, как показано на фиг.3, 4, вместе с отклонением пилона 11 с винтом 6 в кольце 7 при повороте гидроцилиндром 9 рычага 10 качалки 31, качалкой 31 перемещается тяга 30, соединенная с качалкой 31 фиксатором. Тяга 30 перемещает плечи 28, 29 качалок 26, 27, оси которых закреплены на корпусе 1 и/или крыле 2. Качалки 26, 27, которые могут также располагаться как в корпусе 1, так и крыле 2, обеспечивают перемещение створок 22, 23 относительно осей 24, 25. При выполнении осей качалок 26, 27 совмещенными с осями 24, 25 створок 22, 23 происходит поворот створок 22, 23, после чего торцы на верхней 20 и нижней 21 поверхностях крыла 2 открываются. В случае выполнения носка 19 крыла 2 перемещаемым (фиг. 4) носок 19 посредством энергопривода 32 выдвигается по направляющим 33 вперед совместно со створками 22, 23.
При выполнении створок 30, 31 сдвигаемыми вдоль поверхностей 20, 21 крыла 2 тяга 30, как показано на фиг. 5, поворачивает качалку 40 вокруг оси 41, плечи 42, 43 телескопически выдвигаются и перемещают створки 34, 35 вдоль направляющих 36, 37 на крыле 2, обеспечивая открывание и закрытие торцов на верхней 20 и нижней 21 поверхностях крыла 2. Наличие на створках 34, 35 элементов, взаимодействующих с направляющими 36, 37, например роликов 38, 39, способствует уменьшению сил трения и, следовательно, уменьшению требуемой мощности энергопривода механизма перемещения створок. Естественно, что направляющие 36, 37 и ролики 38, 39 могут располагаться как в корпусе 1, так и в крыле 2 за пределами канала 3.
В случае выполнения привода перемещения створок в соответствии с фиг. 6 посредством гибкой, например, цепной передачи цепь 45, соединенная со створками 34, 35, взаимодействует со звездочками 46, 47, 48. При передаче крутящего момента на вал 49 ведущей звездочки 46, расположенной в корпусе 1 и/или в крыле 2, от энергопривода 50 посредством редуктора 51 цепь 45 перемещает створки 34, 35 по направляющим 36, 37. Подпружиненная звездочка 48 обеспечивает натяжение цепи 45 и тем самым повышает равномерность перемещения створок 34, 35. Естественно, что цепная передача может располагаться в корпусе 1 и/или крыле 2 за пределами канала 3.
При оснащении носка 19 крыла 2 направляющей 33 и энергоприводом 32 носок 19 перемещается совместно со створками 34, 35, обеспечивая формирование канала 3 в крыле 2.
Современный уровень техники позволяет реализовать представленную в описании механизацию динамической воздушной подушки транспортного средства на любом специализированном предприятии с использованием известных расчетных и экспериментальных методов и технологий.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКРАНОЛЕТ, ЕГО ВЗЛЕТНО-ПОСАДОЧНОЕ УСТРОЙСТВО И ПРИВОД СКЛАДЫВАНИЯ КРЫЛА | 1995 |
|
RU2099217C1 |
| ЭКРАНОПЛАН | 2003 |
|
RU2286268C2 |
| ЭКРАНОПЛАН | 2005 |
|
RU2297933C1 |
| ЭКРАНОПЛАН | 2019 |
|
RU2716303C1 |
| ЭКРАНОПЛАН | 2010 |
|
RU2432274C1 |
| ЭЛЕКТРОМОТОРНЫЙ ЭКРАНОПЛАН-АМФИБИЯ | 2019 |
|
RU2737406C1 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС ЭКРАНОПЛАНА-АМФИБИИ С ПОДДУВОМ | 2016 |
|
RU2644498C1 |
| ЭКРАНОПЛАН - НОСИТЕЛЬ ТРАНСПОРТНЫХ СРЕДСТВ | 2017 |
|
RU2658545C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЭКРАНОПЛАНА И ЭКРАНОПЛАН, РЕАЛИЗУЮЩИЙ СПОСОБ | 1995 |
|
RU2097269C1 |
| ЭКРАНОПЛАН | 2011 |
|
RU2466888C1 |
Изобретение относится к транспортным средствам на динамической подушке и может быть использовано в механизации при взлете, посадке и крейсерском режиме полета. Сущность изобретения состоит в том, что воздушный винт 6 транспортного средства установлен с возможностью поворота вокруг размещенной перед крылом 2 оси 8 посредством гидроцилиндра 9, качалки 31 и рычага 10. Передняя часть крыла 2 выполнена с каналом 3, торцы которого на поверхностях 20, 21 крыла 2 оснащены створками 22, 23 с осями 24, 25, закрепленными в корпусе 1 и/или крыле 2, и оснащенными приводом их перемещения, например, посредством соединения тягой 30 с качалкой 31. При повороте винта 6 относительно оси 3 гидроцилиндром 9 створки 22, 23 перемещаются, открывают канал 8, обеспечивая прохождение струи от винта 6 под крыло 2, эжекцию ею воздуха, возникновение аэродинамической подсасывающей силы на носке 19 крыла 2. Технический результат от реализации изобретения заключается в уменьшении потерь импульса струи при поддуве под крыло 2 струями близко расположенного воздушного движителя. 5 з.п.ф-лы, 6 ил.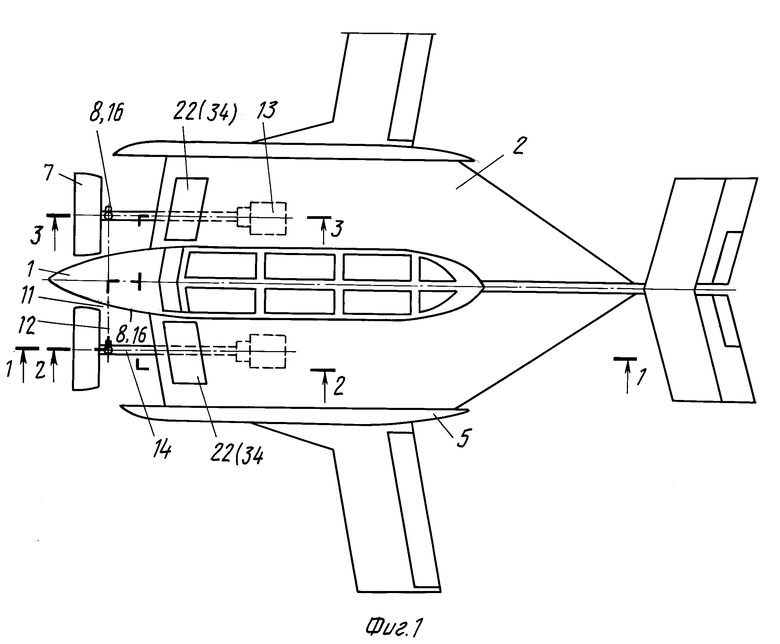
| DE 4115254 C2, 11.11.93 | |||
| АМФИБИЙНЫЙ АППАРАТ НА ВОЗДУШНОЙ ПОДУШКЕ | 1992 |
|
RU2057040C1 |
| СКЕГОВЫЙ ТРАНСПОРТНЫЙ АППАРАТ НА ДИНАМИЧЕСКОЙ ВОЗДУШНОЙ ПОДУШКЕ | 1990 |
|
RU2057664C1 |

