Настоящее изобретение относится к пылесосам для очистки от грязи и пыли, в которых применяется разрежение воздуха и используются механические устройства, а более конкретно к пылесосу с дистанционным управлением, в котором сочетается режим ручной работы с режимом дистанционного управления.
Как показано на фиг.1, в известном ручном пылесосе имеется основной корпус 41, внутри которого находится камера 61, сформированная изолирующими стенками (не показаны). В камере 61 установлен двигатель 43, который создает разрежение и сбоку от которого расположено отделение 62 сбора пыли, а в нем мешок для сбора пыли и посторонних материалов, засасываемых в корпус, когда запускается двигатель 43.
Под двигателем 43 установлены левое и правое колеса 42, 44, закрепленные соответственно с левой и правой стороны основного корпуса 41 для его перемещения. Под отделением 62 сбора пыли установлено осевое колесо 49, расположенное по оси корпуса 41 для его опоры. С передней стороны корпуса 41 выполнен всасывающий патрубок 50, в который вставляется всасывающий шланг 48, предназначенный для направления воздушного потока с грязью и пылью, которые затянуты всасывающими устройствами (не показаны), в мешок 45 сбора пыли.
В таком известном пылесосе с ручным управлением, когда пользователь нажимает выключатель, электропитание, подаваемое через силовой кабель 47, поступает на двигатель 43, и тогда создается разрежение, достаточное для всасывания пыли, посторонних материалов и т. п., осевших на любом месте, которое должно быть очищено. Всосанные материалы подаются через всасывающие устройства и шланг 48 в основной корпус 41 и затем в мешок 45 сбора пыли в отделении 62 сбора пыли. Так совершается очистка.
Пользователь может посредством ручки, установленной на соединительной трубе, тянуть или толкать пылесос для того, чтобы достигнуть следующего участка, который должен быть очищен. Вращение левого и правого колес 42, 44 и осевого колеса 49 позволяет легко перемещать пылесос в направлении выбранного места, окончательная очистка которого может быть выполнена путем повторяющихся действий очистки.
Однако с таким пылесосом с ручным управлением для очистки пользователь должен перемещаться вместе с пылесосом. Это вызывает излишнюю усталость пользователя, и таким образом создаются неудобства. Примером ручного пылесоса может быть также пылесос по а. св. СССР N 224763, кл. A 47 L 5/24, 68 г., который, как и заявленный, решает задачу совмещения уборки открытых пространств и труднодоступных мест с использованием одного пылесоса, корпус которого выполнен с двумя поочередно перекрываемыми всасывающими патрубками. Один из патрубков размещен внизу корпуса и предназначен для чистки открытых пространств без использования шланга при закрытом втором патрубке, который выполнен осевым, размещен на передней стенке корпуса и предназначен для очистки труднодоступных мест с использованием шланга, причем нижний патрубок в это время закрыт.
В качестве наиболее близкого аналога следует принять пылесос с дистанционным управлением по пат. США 5560077, кл. A 47 L 5/00, 96 г.
Известный пылесос с дистанционным управлением включает в себя дистанционный контроллер, подающий управляющий сигнал для соответствующего передвижения пылесоса и для очистки отдаленных от пользователя участков посредством двигателя, создающего разрежение, всасывающий патрубок для автоматической чистки, размещенный с передней стороны снизу корпуса пылесоса и соединенный с отделением сбора пыли.
Задачей настоящего изобретения является создание пылесоса с дистанционным управлением, обладающего способностью работать в ручном режиме в труднодоступных местах. Для достижения указанной задачи в пылесосе, включающем в себя дистанционный контроллер, подающий управляющий сигнал для соответствующего передвижения пылесоса и для очистки отдаленных от пользователя участков посредством двигателя, создающего разрежение, всасывающий патрубок для автоматической чистки, размещенный с передней стороны снизу корпуса пылесоса и соединенный с отделением сбора пыли, упомянутый всасывающий патрубок соединен с отделением сбора пыли через вытяжные каналы, а пылесос включает в себя осевой всасывающий патрубок, связанный с одним из упомянутых каналов и размещенный на передней стороне пылесоса для установки гибкого шланга, необходимого для осуществления операции чистки вручную, с возможностью перекрытия при этом другого канала, причем осевой всасывающий патрубок снабжен устройством для открывания и закрывания, включающим в себя шибер, установленный с возможностью перемещения вдоль выполненного внутри корпуса направляющего паза посредством рукоятки.
На фиг.1 и 2 подобные элементы обозначены одинаковыми номерами.
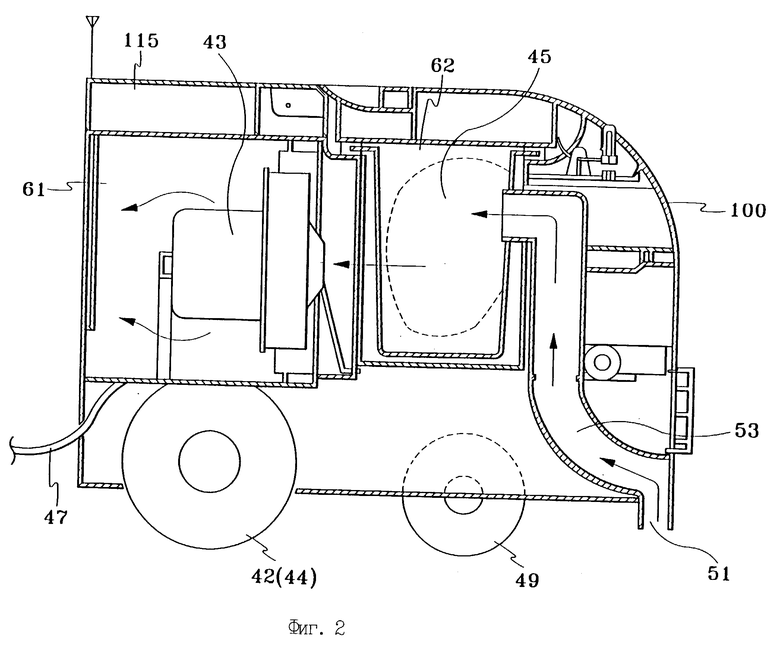
На фиг. 2 приведено вертикальное сечение основного корпуса автоматического пылесоса с дистанционным управлением. Этот пылесос снабжен всасывающим патрубком 51, расположенным на передней нижней стороне корпуса для всасывания грязи и пыли в режиме дистанционного управления, с всасывающим патрубком 50 (см. фиг. 1), к которому присоединяется воздушный шланг 48 для завершения очистки вручную.
Далее, всасывающий патрубок 51 присоединяется к мешку 45 сбора пыли через вытяжной канал 53.
Кроме того, для перемещения пылесоса в желаемом направлении левое и правое колеса 42, 44 основного корпуса 100 приводятся в движение соответственно левым и правым узлами приводных двигателей 132, 134, детали которых будут описаны позднее.
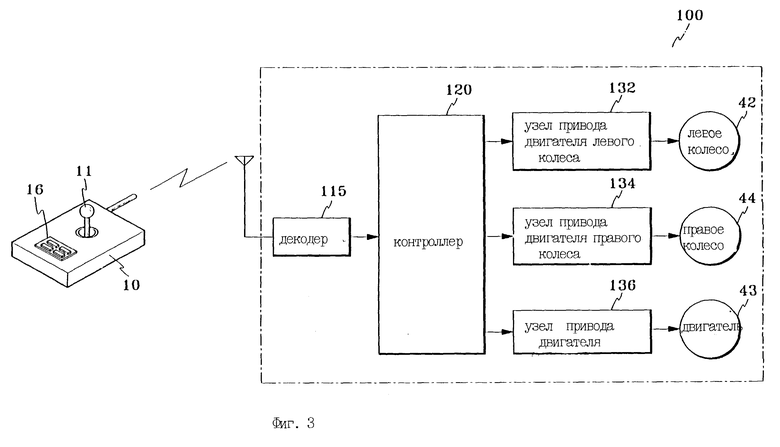
На фиг. 3 представлена блок-схема для объяснения примера пылесоса с дистанционным управлением, который показан на фиг. 2. Эта система с дистанционным управлением состоит из дистанционного контроллера 10 и основного корпуса 100.
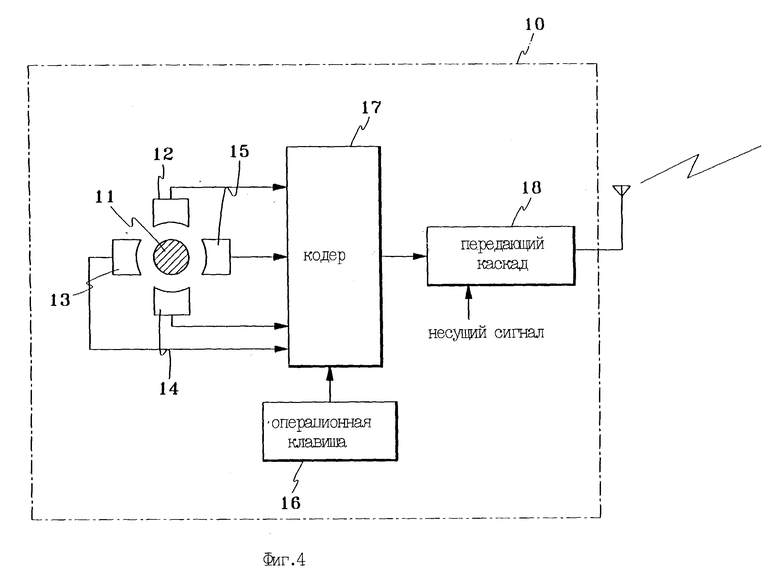
Дистанционный контроллер 10 генерирует сигнал, который используется для дистанционного управления основным корпусом 100, в ответ на манипуляции пользователя, преимущественно может быть использована ручка управления. Как показано на фиг. 4, используемая ручка управления имеет регулируемый контакт 11, четыре контакта с 12 по 15 для соответствующих направлений, операционную клавишу 16, кодер 17 и передающий каскад 18.
Когда ручка управления перемещается пользователем, соответственно регулируемый контакт 11 входит в соприкосновение с одним из четырех контактов. Любой из контактов, вошедших в замыкание с контактом 11, вызывает генерирование контактного сигнала, который поступает на кодер 17. Операционная клавиша 16 генерирует сигнал в соответствии с манипуляциями пользователя.
Закодированный сигнал операционной клавиши и сигналы контактов от соответствующих контактов, с 12 по 15, выходят из кодера 17 и затем направляются в передающий каскад 18, который соответственно передает основному корпусу 100 закодированные сигналы, модулирующие несущий сигнал.
Далее, как показано на фиг. 3, основной корпус 100 включает в себя декодер 115, контроллер 120, узлы 132, 134 привода двигателей левого и правого колес и узел 136 привода двигателя. Декодер 115 получает дистанционный управляющий сигнал, передаваемый от дистанционного контроллера 10, и направляет его в контроллер 120, который в соответствии с ним генерирует управляющий сигнал, чтобы основной корпус 100 работал по очистке участка, и на перемещение корпуса 100 в желаемом направлении.
Узел 132 привода двигателя левого колеса приводит во вращение левое колесо 42 в соответствии с управляющим сигналом движения от контроллера 120, и узел 134 привода двигателя правого колеса приводит во вращение правое колесо 44 в соответствии с управляющим сигналом движения от контроллера 120. Узел 136 привода двигателя приводит в движение двигатель 43 в соответствии с управляющим сигналом движения от контроллера 120.
Со ссылками на фиг. 2 и 4 будет подробно описана работа таким образом сконструированного пылесоса с дистанционным управлением.
Пользователь может манипулировать дистанционным контроллером 10, т.е. преимущественно ручкой управления, имеющей операционную клавишу 16 на ней. Клавиша 16 посылает сигнал в кодер 17, который кодирует полученный сигнал и затем посылает его в передающий каскад 18. Каскад 18 модулирует полученным сигналом несущий сигнал для передачи его через антенну основному корпусу 100. Приемная антенна основного корпуса получает переданный сигнал и направляет в декодер 115. Декодированный сигнал направляется в контроллер 120.
Соответственно контроллер 120 генерирует управляющий сигнал для запуска двигателя 43, установленного в основном корпусе 100. Управляющий сигнал воспринимается узлом 136 привода двигателя, который и запускает двигатель 43. Запущенный двигатель 43 создает разрежение, необходимое для всасывания через щетку (не показана) грязи и пыли с такой поверхности, как пол. Посторонние материалы затем проходят через соединительную трубу 48 и далее через всасывающий патрубок 50 и в конце собираются в отделении 62 сбора пыли.
Тем временем пользователь для того, чтобы перемещать основной корпус 100, манипулирует дистанционным контроллером 10 или ручкой управления в требуемом направлении. Манипуляции вызывают замыкание контакта ручки с контактами, расположенными в соответствующем направлении. Сигнал от контакта направляется в кодер 17, в котором сигнал кодируется и затем модулируется и через антенну передается в основной корпус 100.
Переданный от дистанционного контроллера 10 сигнал принимается через антенну основного корпуса 100. Принятый сигнал декодируется декодером 115, который соединен с контроллером 120, принимающим декодированный сигнал. В соответствии с декодированным сигналом контроллер генерирует управляющий сигнал на перемещение основного корпуса 100 и соответственно приводит в действие узлы 132, 134 привода левого и правого двигателей, результатом чего является перемещение основного корпуса 100, соответствующее дистанционному управляющему сигналу.
Например, пользователь может наклонить ручку управления вперед, в результате регулируемый контакт 11 замкнется с передним контактом 12, после чего генерируется сигнал замыкания контакта и поступает в кодер 17. В соответствии с вышеуказанной процедурой начинают вращаться оба правое и левое колеса основного корпуса 100, чтобы корпус перемещался вперед.
Если пользователь отклоняет ручку управления влево для того, чтобы переместить корпус 100 налево, левый контакт 13 замыкается с регулируемым контактом 11. В соответствии с сигналом контакта дистанционный управляющий сигнал передается в корпус 100 и в соответствии с управляющим сигналом контроллера 120, который приводит в действие узел 134 привода правого колеса, приводится в движение только правое колесо основного корпуса.
Для движения корпуса 100 влево и вперед пользователь может перемещать ручку управления соответственно влево и вперед, в результате контакты 13 и 12 должны замыкаться с регулируемым контактом 11. Тогда соответствующий дистанционный управляющий сигнал передается в корпус 100. Контроллер 120 приводит в действие узел 134 привода правого колеса для привода правого колеса с более высокой скоростью и приводит в действие узел 132 привода левого колеса для привода левого колеса с меньшей скоростью.
Так как в известном пылесосе с дистанционным управлением всасывающий вход 51 расположен в нижней передней части корпуса 100, пылесос может работать только в дистанционном режиме. В некоторых случаях для очистки определенных мест необходим ручной режим. Однако указанный вид известного пылесоса не может использоваться в ручном режиме и неудобен для практического применения.
Как следствие изложенного, задача настоящего изобретения - создание пылесоса с дистанционным управлением, обладающего способностью работать в ручном режиме в любом месте, которое должно быть очищено для того, чтобы таким образом улучшить практическое использование пылесоса и обеспечить удобства для пользователя.
Для достижения указанной задачи пылесос с дистанционным управлением включает в себя двигатель, установленный в камере внутри основного корпуса, для создания разрежения, мешок сбора пыли, закрепленный в отделении сбора пыли для сбора грязи и пыли, втянутых за счет разрежения, созданного двигателем, левое и правое колеса для перемещения основного корпуса, которые приводятся в движение левым/правым или левым и правым узлами привода вместе, осевое колесо, установленное в передней нижней части основного корпуса и вращающееся одновременно с вращением правого и левого колес, всасывающий патрубок, установленный в передней нижней части основного корпуса, который соединен с отделением сбора пыли через всасывающий канал, при этом в нем выполнен осевой всасывающий патрубок, установленный в нижней передней части основного корпуса, который может быть открытым или закрытым посредством шибера.
Внутри основного корпуса выполнен направляющий паз для направления открывающего/закрывающего устройства, когда осевой всасывающий патрубок закрывается или открывается.
Кроме того, открывающее/закрывающее устройство включает шибер для осевого всасывающего патрубка, который перемещается вдоль направляющего паза, и рукоятку для перемещения шибера.
В соответствии с вышеуказанной конструкцией пылесоса обеспечивается работа вручную при использовании гибкого шланга, таким образом обеспечивается удобство для пользователя и улучшается практическое использование пылесоса.
Другие задачи и аспекты изобретения станут очевидны из следующего описания сущности изобретения со ссылками на сопровождающие описание чертежи.
На фиг. 1 показано вертикальное сечение основного корпуса известного пылесоса, используемого в ручном режиме работы;
на фиг. 2 показано вертикальное сечение основного корпуса известного пылесоса с дистанционным управлением, который используется в автоматическом режиме работы;
на фиг. 3 показана блок-схема пылесоса с дистанционным управлением, выполненного в соответствии с настоящим изобретением;
на фиг. 4 показаны элементы контроллера дистанционного управления, представленного на Фиг. 3;
на фиг. 5 показано вертикальное сечение основного корпуса пылесоса с дистанционным управлением, выполненного в соответствии с настоящим изобретением; и
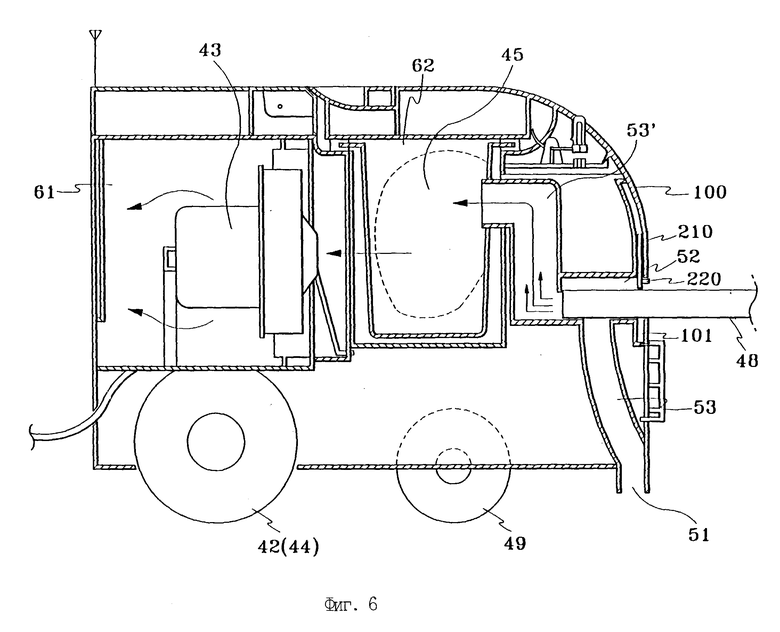
на фиг. 6 показано вертикальное сечение пылесоса, представленного на Фиг. 5, находящегося в действии.
Первый пример предпочтительного варианта осуществления настоящего изобретения будет полностью описан со ссылками на сопровождающие описание чертежи.
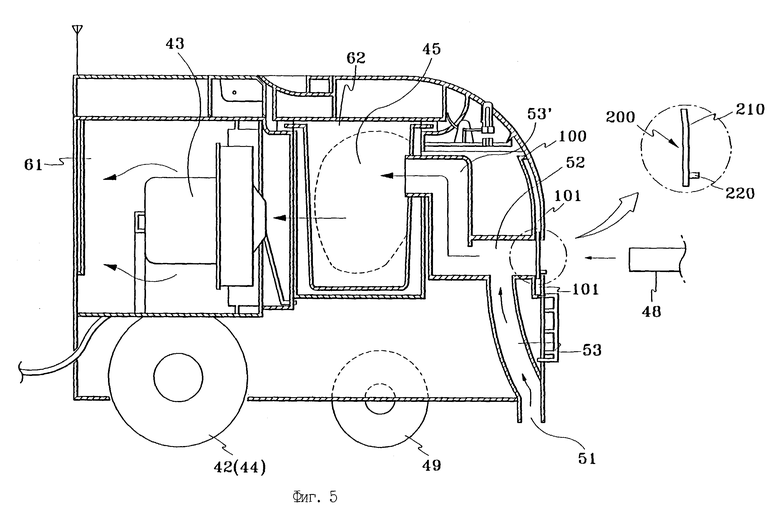
На фиг. 5 показано вертикальное сечение основного корпуса пылесоса с дистанционным управлением, выполненного в соответствии с настоящим изобретением.
В пылесосе имеется основной корпус 100, внутри которого находится камера с установленным в ней двигателем 43, который создает разрежение и сбоку от которого расположено отделение 62 сбора пыли, а в нем мешок 45 для сбора пыли и посторонних материалов, засасываемых в корпус, когда запускается двигатель 43.
Под двигателем 43 установлены левое и правое колеса 42, 44, закрепленные соответственно с левой и правой сторон основного корпуса 100 для его перемещения, приводимые в движение левым/правым или левым и правым вместе узлами привода 132, 134. Под отделением 62 сбора пыли установлено осевое колесо 49, расположенное по оси корпуса 100 для его опоры. С передней стороны снизу корпуса 100 выполнен всасывающий патрубок 51, соединенный с отделением 62 сбора пыли через вытяжные каналы 53, 53'.
На передней стороне пылесоса также выполнен осевой всасывающий патрубок 52 для установки гибкого шланга 48, необходимого, когда осуществляется операция очистки вручную. Осевой всасывающий патрубок 52 соединяется с вытяжным патрубком 53'. Осевой всасывающий патрубок 52 оснащен закрывающим/открывающим устройствам 200, которое скользит в вертикальном направлении для того, чтобы закрыть или открыть осевой всасывающий патрубок 52.
Внутри основного корпуса 100 выполнен направляющий паз 101 для того, чтобы направлять открывающее/закрывающее устройство 200, когда открывается или закрывается осевой всасывающий патрубок 52.
Открывающее/закрывающее устройство 200 включает шибер 210 для осевого всасывающего патрубка 52, который перемещается вдоль направляющего паза, и рукоятку 220 для перемещения шибера 210.
Работа пылесоса с дистанционным управлением, выполненного в соответствии с настоящим изобретением, будет описана со ссылками на фиг. 5 и 6.
Обычно пользователь может чистить в дистанционном режиме относительно большие площади такие, как полы или полы типа "On-dol" ("On-dol" означает тип корейского пола с расположенной под полом системой нагрева). Использование дистанционного режима предоставляет пользователю удобства.
При очистке участков поверхности в дистанционном режиме, когда осевой всасывающий патрубок 52 плотно закрыт, двигатель 43 создает разрежение внутри вытяжных каналов 53, 53' в результате того, что закрывающее/открывающее устройство 200 полностью перекрывает осевой всасывающий патрубок 52.
Когда пользователь намеревается чистить особые места такие, как угловые участки или верхнюю поверхность шкафа, которые чистить трудно, закрывающее/открывающее устройство 200 перемещается вдоль направляющего паза 101, чтобы, как показано на фиг. 6, открыть осевой всасывающий патрубок 52, и затем конец шланга 48 вставляется во всасывающий патрубок 52 для его установки. Таким образом перекрывается вытяжной канал 53, соединенный с отделением 62 сбора пыли, и в то же время другой канал 53' соединяется со шлангом 48.
После монтажа пылесоса таким образом, в соответствии с приведенным описанием, подключается электропитание. Затем разрежение, создаваемое двигателем 43, действует через гибкий шланг 48, а не через всасывающий патрубок 51, в результате чего создается возможность работы пылесоса в ручном режиме.
Далее, если пылесос используется в автоматическом режиме, сначала гибкий шланг 48 отделяется от осевого всасывающего патрубка 52, затем ранее поднятое вверх закрывающее/открывающее устройство 200 опускается вниз в направляющем пазе 101. Таким образом закрывается шибером 210 осевой всасывающий патрубок 52, при этом открывается вытяжной канал 53 и создается возможность для чистки с дистанционным управлением.
В соответствии с изложенным настоящее изобретение обеспечивает сочетание работы вручную с работой в автоматическом режиме, в результате чего предоставляются удобства пользователю и улучшается практическое использование, также как и ценность изделия.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЫЛЕСОС | 1996 |
|
RU2121288C1 |
| УСТРОЙСТВО ВРАЩАТЕЛЬНОГО ПРИВОДА ПОЛОВОЙ МАТЕРЧАТОЙ ЩЕТКИ В ПЫЛЕСОСЕ | 2001 |
|
RU2200450C2 |
| ПЫЛЕСОС ВЕРТИКАЛЬНОЙ КОМПОНОВКИ (ВАРИАНТЫ) | 2001 |
|
RU2204312C2 |
| ПЫЛЕСОС С РЕЦИРКУЛЯЦИЕЙ ВОЗДУШНОГО ПОТОКА | 2000 |
|
RU2181252C1 |
| ПЫЛЕСОС С ПАРОСТРУЙНЫМ УСТРОЙСТВОМ | 1995 |
|
RU2091053C1 |
| ВСАСЫВАЮЩАЯ НАСАДКА ПЫЛЕСОСА | 1997 |
|
RU2120223C1 |
| ВСАСЫВАЮЩАЯ НАСАДКА ПЫЛЕСОСА | 1997 |
|
RU2119763C1 |
| ПЫЛЕСОБИРАЮЩЕЕ УСТРОЙСТВО ЦИКЛОННОГО ТИПА ДЛЯ ВАКУУМНОГО ПЫЛЕСОСА | 2000 |
|
RU2181254C1 |
| ВАКУУМНЫЙ ПЫЛЕСОС | 2000 |
|
RU2181255C1 |
| ПЫЛЕСОС, ИМЕЮЩИЙ УСТРОЙСТВО ДЛЯ ВЛАЖНОЙ УБОРКИ | 1995 |
|
RU2096984C1 |
Изобретение относится к пылесосу с дистанционным управлением, включающему двигатель, установленный в камере внутри основного корпуса для создания разрежения, мешок сбора пыли, закрепленный в отделении сбора пыли для сбора грязи и пыли, втянутых за счет разрежения, созданного двигателем, левое и правое колеса для перемещения основного корпуса. Колеса приводятся в движение только левым или правым или левым и правым узлами привода вместе. Осевое колесо установлено в передней нижней части основного корпуса и вращается одновременно с правым и левым колесами. Всасывающий патрубок, установленный в передней нижней части основного корпуса, предназначен для автоматической очистки и соединен с отделением сбора пыли через вытяжной канал. Осевой всасывающий патрубок установлен в передней части основного корпуса и является открытым или закрытым посредством шибера. Таким образом обеспечивается при использовании гибкого шланга работа пылесоса в ручном режиме и соответственно обеспечивается удобство для пользователя и улучшается практическое использование пылесоса. 6 ил.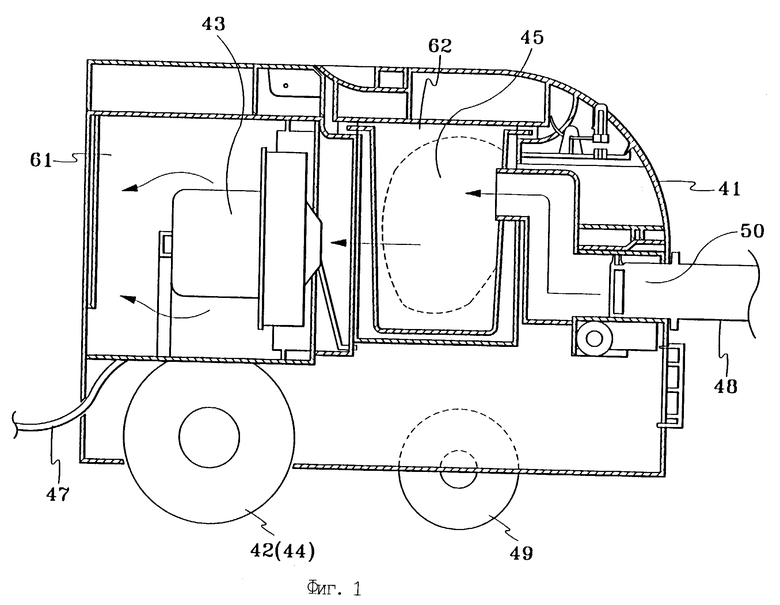
Пылесос с дистанционным управлением, включающий в себя дистанционный контроллер, подающий управляющий сигнал для соответствующего передвижения пылесоса и для очистки отдаленных от пользователя участков посредством двигателя, создающего разрежение, всасывающий патрубок для автоматической чистки, размещенный с передней стороны снизу корпуса пылесоса и соединенный с отделением сбора пыли, отличающийся тем, что упомянутый всасывающий патрубок соединен с отделением сбора пыли через вытянутые каналы, а пылесос включает в себя осевой всасывающий патрубок, связанный с одним из упомянутых каналов и размещенный на передней стороне пылесоса для установки гибкого шланга, необходимого для осуществления операции чистки вручную, с возможностью перекрытия при этом другого канала, причем осевой всасывающий патрубок снабжен устройством для открывания и закрывания, включающим в себя шибер, установленный с возможностью перемещения вдоль выполненного внутри корпуса направляющего паза посредством рукоятки.
| US 5560077 A, 01.10.96 | |||
| МАШИНА ДЛЯ УБОРКИ ПОМЕЩЕНИЯ | 1966 |
|
SU224763A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПРОВОЛОЧНОЙ ЛЕНТЫ, СОСТОЯЩЕЙ ИЗ БОЛЬШОГО ЧИСЛА РАСПОЛОЖЕННЫХ ПАРАЛЛЕЛЬНО ДРУГ ДРУГУ ПРОВОЛОЧНЫХ НИТЕЙ, А ТАКЖЕ ПРОВОЛОЧНАЯ ЛЕНТА, ИЗГОТОВЛЕННАЯ ЭТИМ СПОСОБОМ | 2008 |
|
RU2454291C2 |
| US 5191673 A, 09.05.93 | |||
| US 5343590 A, 06.09.94 | |||
| US 4114231 A, 19.09.78. | |||

