Изобретение относится к области измерительной техники, в частности к средствам определения орбитальных волновых скоростей в прибрежной зоне моря, где параметры течений характеризуются наибольшей изменчивостью и экстремальными значениями при относительно небольших глубинах, при исследовании движения водного потока и транспорта наносов.
Выбор достоверного способа измерения мгновенных значений орбитальных волновых скоростей является одной из основных задач, без решения которой, в частности, невозможно изучение процесса перемещения взвешенного твердого материала водным потоком. В свою очередь выявление эмпирических зависимостей, описывающих процесс перемещения взвешенного твердого материала водным потоком, невозможно без проведения точных инструментальных измерений волновых скоростей.
Для измерения орбитальных волновых скоростей в береговой зоне моря известны датчики скорости потока, выпускаемые фирмами March-McBirney (США, модель 5120 EM), Interocean (США, модель S4), Eg&g (США, модель CT/3), NSW (ФРГ) и другими.
Аналогичные устройства описаны в а.с. N 834522 (индукционный лаг), 1981, N 873307 (индукционный способ измерения скорости электропроводящего потока), 1981, N 960630 (электромагнитный первичный измерительный преобразователь скорости), 1982, N 1144057 (устройство для измерения пульсаций скорости потока электропроводной жидкости), 1985, N 1155948 (измеритель скорости судна), 1985.
Однако ни одно из указанных устройств не обеспечивает стабильных показаний при приближении чувствительной головки датчика к дну или к поверхности воды менее чем на 7 - 10 см, что исключает использование таких устройств на мелководных участках.
Наиболее близким к предложенному является электромагнитный измеритель скорости водного потока, содержащий погружаемый под воду герметичный первичный преобразователь скорости потока в электрический сигнал с выходным предварительным усилителем и береговой измерительный блок, в состав которого входят источник питания и блок окончательной обработки сигнала, связанный с подводной частью кабелем (см. "Разработка электромагнитного измерителя скорости водного потока в рамках НИР", ИОРАН, 1988, 25с.). Первичный преобразователь представляет собой воздушную индукционную катушку постоянного тока с системой из четырех диаметрально противоположно расположенных электродов, напряжение с которых подается на предварительный усилитель.
Основным недостатком известного измерителя также является низкая точность измерения и нестабильность показаний при исследовании в придонном или приповерхностном слоях воды, что существенно ограничивает его функциональные возможности. Кроме того, известный датчик обладает недостаточной помехоустойчивостью, что обусловлено тем, что индукционная катушка создает постоянное поле низкой напряженности.
Таким образом, техническим результатом, ожидаемым от использования электромагнитного измерителя скорости водного потока, является повышение точности и стабильности показаний за счет снижение влияния на показания дна и поверхности воды, а также увеличение отношения сигнал/шум, что позволит использовать данный прибор на более близком ко дну и поверхности расстоянии и проводить измерения в сложной электромагнитной обстановке.
Указанный результат достигается тем, что в известном измерителе скорости водного потока, содержащем соединенные линией связи погружаемый герметичный первичный преобразователь скорости потока в электрический сигнал, выполненный в виде индукционной катушки с системой из четырех периферийных диаметрально противоположно распложенных электродов, подключенных ко входу предварительного усилителя, и береговой измерительный блок, в состав которого входят источник питания и блок обработки и регистрации, источник питания выполнен в виде источника переменного тока, а первичный преобразователь скорости потока в электрический сигнал выполнен со штангой, на рабочем конце которой закреплен цилиндрический сердечник, на боковой поверхности и торцах которого размещены соответственно индукционная катушка с системой из четырех периферийных диаметрально противоположно расположенных электродов и верхняя и нижняя фокусирующие катушки, подключенные встречно к выходу источника питания относительно индукционной катушки.
При этом первичный преобразователь скорости потока в электрический сигнал может быть выполнен также с центральным опорным электродом, размещенным на торце рабочего конца штанги.
Кроме того, средний диаметр и высота фокусирующих катушек могут быть меньше среднего диаметра и высоты индукционной катушки соответственно.
При этом средний диаметр и высота верхней фокусирующей катушки могут быть меньше среднего диаметра и высоты нижней фокусирующей катушки соответственно.
Рекомендуется также выполнить систему индукционной и фокусирующих катушек в виде сферы.
Целесообразно также выполнить первичный преобразователь скорости потока в электрический сигнал с герметизирующим внешним сферическим слоем компаунда.
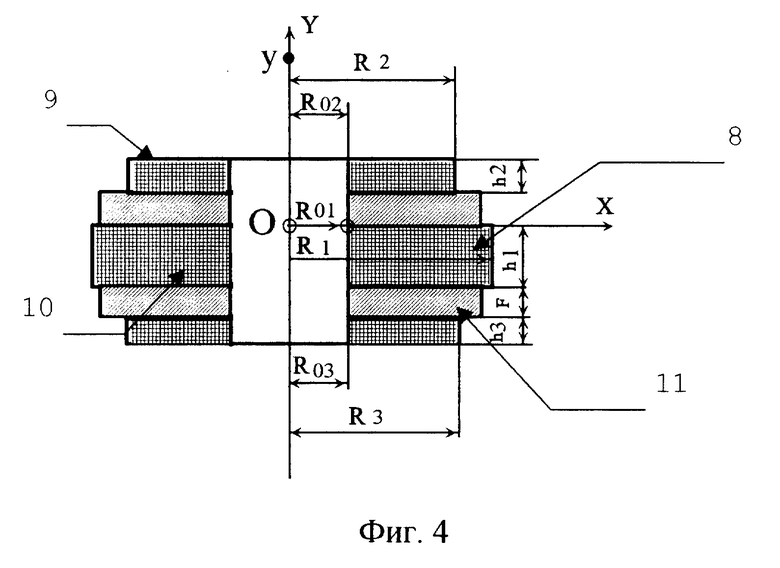
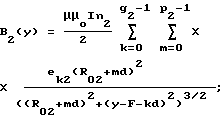
И, наконец, индукционная и фокусирующая катушки могут быть выполнены идентичными, а их параметры допускается выбирать из соотношений:
B1(y)-K2B2(y)-K3B3(y) = O;

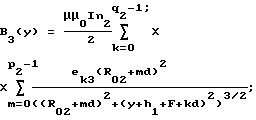
0,5 см < y < 1,5 см;
0,87 ≤ K2 ≤ 1;
1 ≤ K3 ≤ 1,22,
где μ - магнитная проницаемость среды,
μ0 - магнитная постоянная,
q - число горизонтальных слоев витков,
p - число вертикальных слоев витков в катушке,
RO - радиус начала обмотки,
R - радиус окончания обмотки,
d - диаметр проволоки, которой намотаны катушки,
h - высота катушки,
I - ток в катушке,
F - высота сердечника,
q1 = h1/d,
q2 = h2/d,

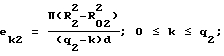
ek2=1; k = q2;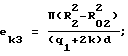
индексы 1, 2, 3 относятся к индукционной, верхней и нижней фокусирующим катушкам соответственно.
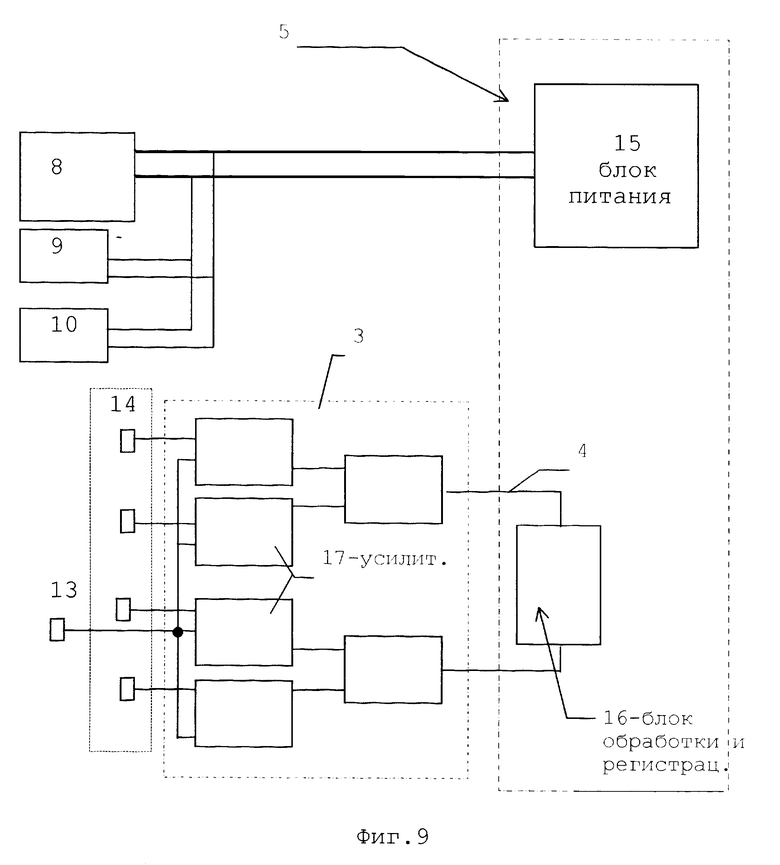
На фиг. 1 показана схема электромагнитного измерителя скорости и иллюстрируется процесс измерения с его помощью. Фиг. 2 - 8 иллюстрируют выполнение системы катушек первичного преобразователя и процесс формирования его электромагнитного поля, а на фиг. 9 показана электрическая схема устройства, при этом на фиг. 2, 4 и 6 показан частичный разрез системы катушек вдоль штанги.
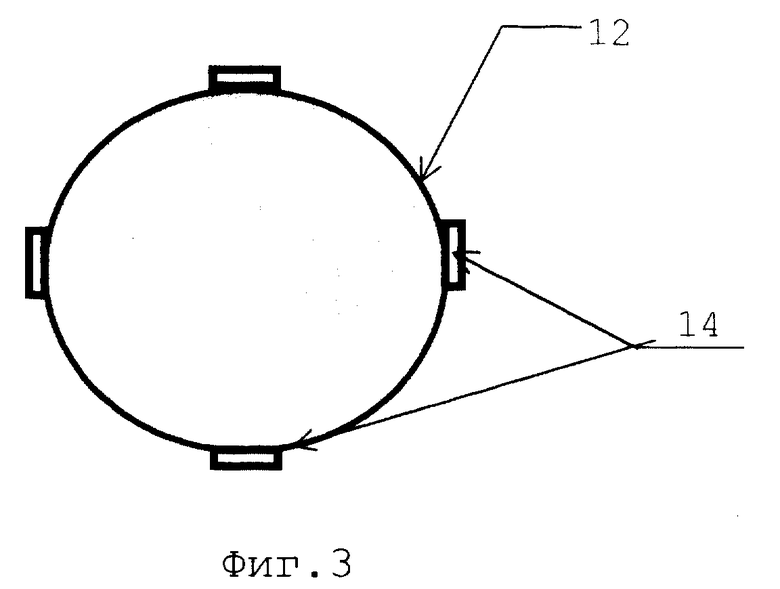
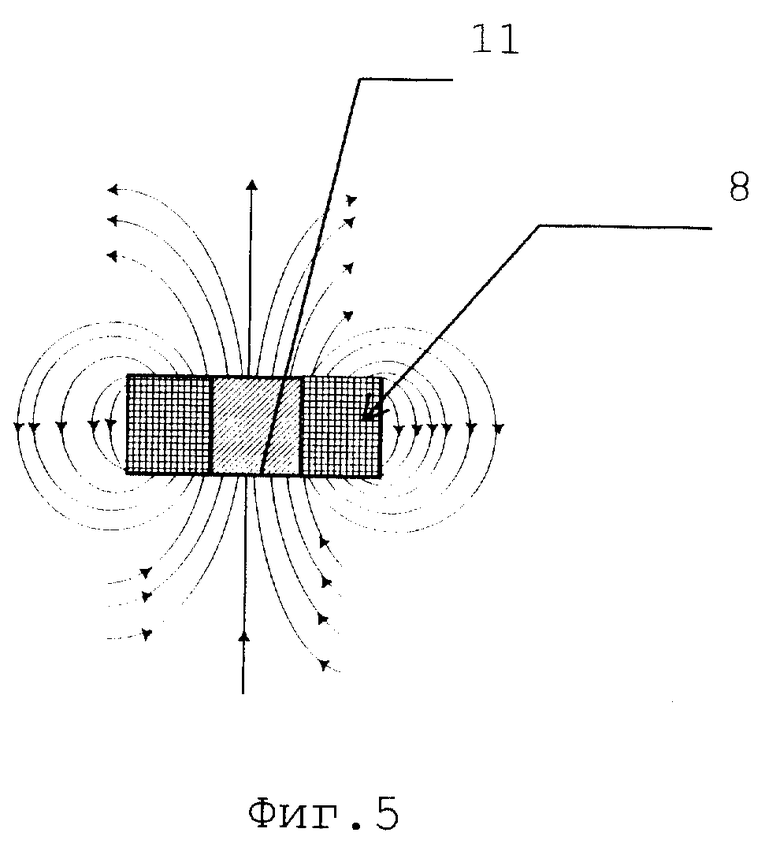
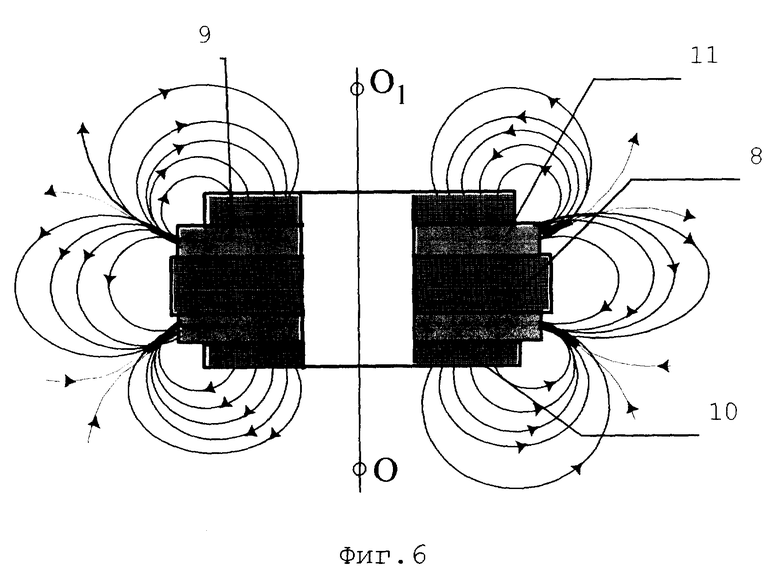
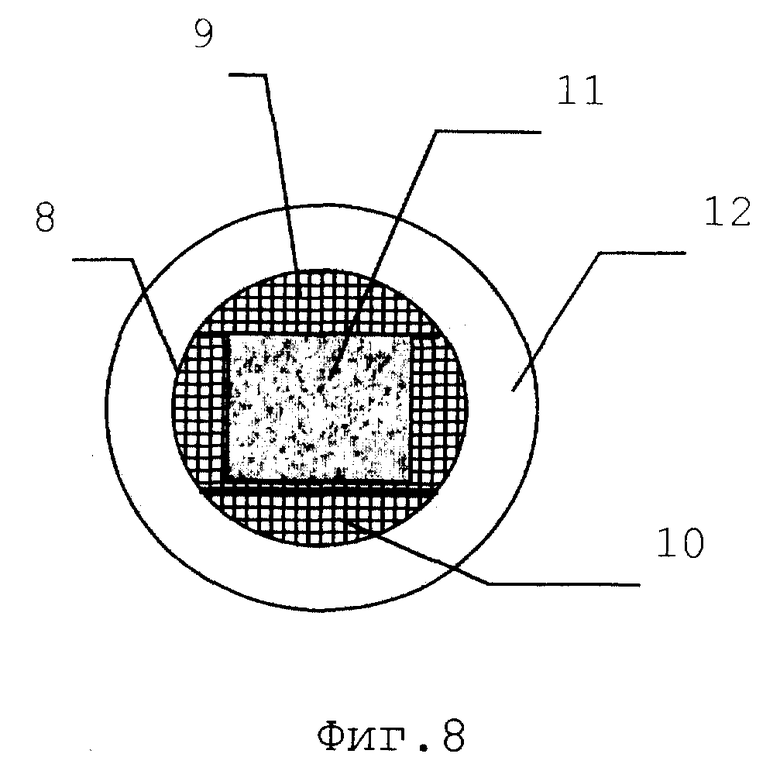
Электромагнитный измеритель скорости содержит (фиг. 1) первичный преобразователь 1, штангу 2, блок 3 предварительных усилителей, линию 4 (проводники) связи и береговой измерительный блок 5. На фиг. 1 обозначено также: 6 - поверхность дна, 7 - уровень моря. В состав преобразователя 1 входят (фиг. 2 - 8) центральная индукционная катушка 8, верхняя 9 и нижняя 10 фокусирующие катушки, сердечник 11 катушки 8, защитный слой 12 компаунда, центральный опорный электрод 13 и четыре боковых (периферийных) электрода 14. Блок 5 (фиг. 9) включает блок 15 питания и блок 16 обработки и регистрации. Блок 3 образован усилителями 17. Позицией 18 обозначен рабочий конец 18 штанги 2.
Работа электромагнитного измерителя скорости водного потока основана на возникновении поперечного электрического поля в проводнике при перемещении его перпендикулярно направлению силовых линий магнитного поля. Это явление обусловлено влиянием силы Лоренца на движущиеся заряды (см. фиг. 2), которая равна F = q [v B] и модуль которой
F = |q|νBsinα,
где q - электрический заряд носителя тока (положительный или отрицательный заряд ионов жидкости; V - скорость потока зарядов (ионов жидкости); b - магнитная индукция, α - угол между векторами v и B.
Сила Лоренца направлена всегда перпендикулярно к скорости заряженной частицы и вектору магнитной индукции, а направление определяется знаком заряда частицы. В результате ее действие приводит к пространственному разделению разноименно заряженных движущихся частиц (фиг. 2) и появлению ЭДС, определяемой законом Фарадея пропорциональной магнитной индукции, расстоянию между электродами 14 и скорости потока жидкости. Таким образом, при заданных магнитной индукции и расстоянии между электродами 14 разность потенциалов, наводимая на последних, является функцией только скорости водного потока. На этом и основана работа датчика.
При этом необходимо учесть, что использование постоянных магнитов или катушек постоянного тока для создания магнитного поля в водной среде приводит к поляризации жидкости и появлению на электродах нестабильных во времени потенциалов. При использовании же катушки 8 индуктивности, работающей на переменном электрическом токе, в воде создается знакопеременное магнитное поле, а при поступательном движении относительно него водной среды, являющейся электролитом, в ней наводится знакопеременная разность потенциалов, что исключает появление поляризационных эффектов в жидкости. Также необходимо учесть, что при приближении преобразователя 1 ко дну 6 или к поверхности 7 меняется потокосцепление катушки 8 индуктивности со средой, что приводит к появлению паразитной составляющей на электродах 14. Уменьшить этот эффект можно путем локализации магнитного поля вокруг чувствительной головки датчика. В частности, из сопоставления фиг. 5 и 6 видно, что поле системы катушек 8 - 10 локализовано в меньшем объеме, чем поле катушки 8, поскольку катушки 9,10 (L2, L3) служат в качестве активного экрана осевого магнитного поля катушки 8 (L1), а также обеспечивают частичное боковое экранирование. Сердечник 9, изготовленный из магнитомягкого сплава, служит для усиления радиальной составляющей магнитного поля.
При изготовлении устройства параметры его выбираются с учетом вышеприведенных соотношений, при этом подбор величин K2 и K3 осуществляется экспериментально в указанных пределах исходя из равенства нулю индукции системы катушек в точке y.
При отсутствии электрода 13 число усилителей 17 в блоке 3 сокращается до двух, каждый из которых формирует разность потенциалов между диаметрально расположенными электродами 14.
Блок 16 может быть выполнен в виде самописца, двухканального аналогового регистратора, цифрового показывающего прибора, векторного преобразователя и т.п.
На фиг. 2 - 8 показано, что элементы 8 - 11 размещены на боковой поверхности конца 18 штанги 2, однако возможно их размещение и на торце штанги 2.
Встречное включение катушек 9,10 относительно катушки 8 означает, что встречно направлены вектора индукции создаваемых ими полей, как это показано на фиг. 3.
Выполнение системы катушек в виде сферы (фиг. 8) означает использование сферической намотки.
Полость штанги 2 служит для размещения проводников 4 линии связи.
Как показали проведенные испытания, предлагаемый измеритель сохраняет высокую точность и стабильность показаний при приближении к дну или поверхности менее чем на 1 см.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОРСКОЙ ТУРБИДИМЕТР | 1996 |
|
RU2112232C1 |
| ДАТЧИК ДОННЫХ ФОРМ | 1994 |
|
RU2072539C1 |
| Седиментометр | 1990 |
|
SU1804609A3 |
| ГИДРОАКУСТИЧЕСКАЯ СТЕРЖНЕВАЯ РЕЗОНАНСНАЯ АНТЕННА | 1989 |
|
RU2039417C1 |
| Способ измерения скорости звука в жидкости | 1982 |
|
SU1154545A1 |
| Акустический зонд для измерения скорости звука в море | 1990 |
|
SU1770770A1 |
| Датчик для циклического измерителя скорости звука в жидкости | 1980 |
|
SU945674A1 |
| Многоканальный цифровой измеритель малой девиации периода | 1989 |
|
SU1626178A1 |
| Переносной импульсный гидролокатор | 1990 |
|
SU1721559A1 |
| Импульсный гидролокатор | 1990 |
|
SU1802350A1 |


Измеритель предназначен для определения орбитальных волновых скоростей в прибрежной зоне моря, где параметры течений характеризуются наибольшей изменчивостью и экстремальными значениями при относительно небольших глубинах, при исследовании движения водного потока и транспорта наносов. Измеритель содержит соединенные линией связи погружаемый герметичный первичный преобразователь скорости потока в электрический сигнал и береговой измерительный блок. Преобразователь выполнен в виде индукционной катушки с системой из четырех периферийных диаметрально противоположно расположенных электродов, подключенных к входу предварительного усилителя. В береговой измерительный блок входят источник питания и блок обработки и регистрации. Источник питания выполнен в виде источника переменного тока. Первичный преобразователь выполнен со штангой, на рабочем конце которой закреплен цилиндрический сердечник, на боковой поверхности и торцах которого размещены соответственно индукционная катушка с системой из четырех периферийных диаметрально противоположно расположенных электродов и верхняя и нижняя фокусирующие катушки, подключенные к выходу источника питания встречно относительно индукционной катушки. Обеспечивается повышение точности и стабильности показаний, а также увеличение отношения сигнал/шум. 6 з.п.ф-лы, 9 ил.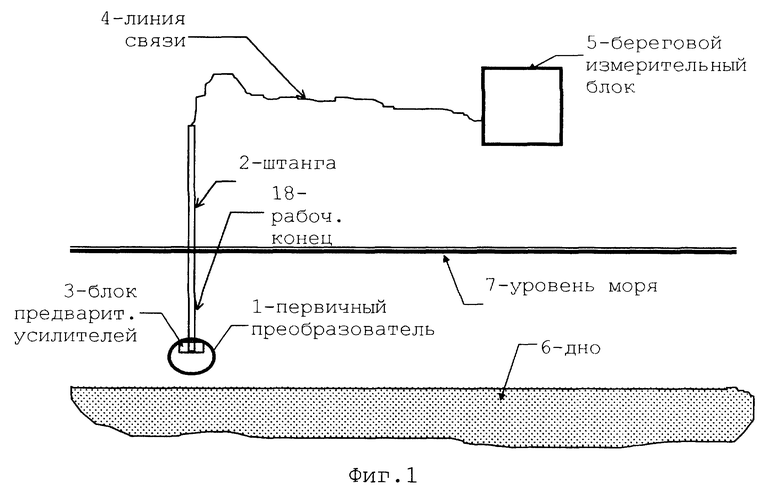
B1(y)-K2B2(y)-K3B3(y) = O,
где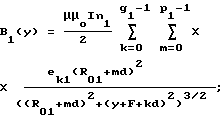
0,5 см < y < 1,5 см;
0,87 ≤ K2 ≤ 1;
1 ≤ K3 ≤ 1,22;
μ - магнитная проницаемость среды;
μo - магнитная постоянная;
q - число горизонтальных слоев витков;
p - число вертикальных слоев витков в катушке;
Ro - радиус начала обмотки;
R - радиус окончания обмотки; d - диаметр проволоки, которой намотаны катушки;
h - высота катушки;
I - ток в катушке;
F - высота сердечника;
q1 = h1/d;
q2 = h2/d;
индексы 1,2,3 относятся к индукционной, верхней и нижней фокусирующим катушкам соответственно.
| Разработка электромагнитного измерителя скорости водного потока в рамках НИР | |||
| - ИО РАН, 1988, с.25 | |||
| ЭЛЕКТРОМАГНИТНЫЙ ИЗМЕРИТЕЛЬ СКОРОСТИ ПОТОКА | 1992 |
|
RU2042136C1 |
| US 3503258 А, 31.03.70 | |||
| US 3504541 А, 07.04.70 | |||
| СПОСОБ ДОСТУПА ДЛЯ АДРЕНАЛЭКТОМИИ | 2003 |
|
RU2240054C1 |
| СПОСОБ РАСПОЗНАВАНИЯ РЕЧЕВЫХ КОМАНД УПРАВЛЕНИЯ | 2003 |
|
RU2271578C2 |
| DE 3707138 А1, 04.08.88. | |||
