Изобретение относится к технологии строительных работ и может быть использовано для выполнения подземных переходов с помощью пневмопробойников.
Известен способ изменения направления движения пневмопробойника в грунте с помощью отклоняющего устройства, реализованный в устройстве для искривления скважин по авт. св. СССР N 487987, E 02 F 5/18, включающий операции проходки участка скважины, извлечения пневмопробойника из скважины, ориентации отклоняющего устройства, доставки пневмопробойником до забоя отклоняющего устройства и его стопорения в забое для изменения траектории движения пневмопробойника.
Недостатком известного способа является однократность коррекции направления движения, так как управляющее воздействие на пневмопробойник осуществляется только на участке его взаимодействия с застопоренным в забое отклоняющим устройством. К недостаткам способа относятся также технические сложности определения положения пневмопробойника в грунте для осуществления коррекции направления движения и обеспечения сохранения ориентации отклоняющего устройства при его доставке до забоя.
Вышеприведенные недостатки способа исключают возможность выхода скважины в заранее заданную точку.
Известен способ управления движением пневмопробойника в грунте, включающий операцию походки скважины при непрерывном вращении его корпуса, имеющего скошенную носовую часть, и операцию проходки скважины с невращающимся корпусом.
Пневмопробойник со скошенной носовой частью корпуса непрерывно изменяет направление движения в грунте, т.е. движется только по криволинейной траектории. Это обусловлено тем, что со стороны скошенной носовой части корпуса пневмопробойника на него действует неуравновешенная составляющая сил лобового сопротивления грунта.
Непрерывное вращение корпуса обеспечивает движение пневмопробойника по спирали, ось которой прямолинейна. Для осуществления операции непрерывного вращения корпуса пневмопробойника в его хвостовой части устанавливают муфту, на наружной поверхности которой выполнены скошенные лопасти (фирма "Эллайд Стилл энд Трактор Продакт" - патент США N 4632191, E 21 B 4/06), или используют буровой станок, соединенный с корпусом пневмопробойника ставом штанг (фирма "Тракто-Техник", Германия).
Прекращение вращения корпуса при отключении муфты или бурового станка позволяет изменить движение по спирали на криволинейное движение в одной плоскости и, тем самым, изменить общую направленность движения пневмопробойника в грунте.
В процессе проходки скважины перечисленные операции повторяют.
Недостатком указанного способа является сложность контроля положения пневмопробойника в грунтовом массиве. Ситуация усугубляется тем, что трассы переходов обычно проходят под или рядом с объектами, создающими активные и пассивные помехи (электротранспорт, линии электропередач, подземные кабели, металлические конструкции и т.д). Погрешность в точности оценки положения пневмопробойника в грунте существенно снижает вероятность выхода скважины в заданную точку.
Другим недостатком способа является сложность используемых систем проходки и контроля, а следовательно, их высокая стоимость (например, управляемый пневмопробойник вместе с системой контроля фирмы "Эллайд Стилл энд Трактор Продакт" стоят в 60 раз дороже неуправляемого пневмопробойника).
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является способ получения криволинейной скважины пневмопробойником, реализованный в устройстве для образования скважин по авт.св. СССР N 939668, E 02 F 5/18, E 21 B 7/06, включающий операции проходки скважины пневмопробойником и непрерывного управляющего воздействия на него дополнительного силового органа, соединенного канатно-блочной системой с периферией хвостовой части пневмопробойника.
Основным недостатком известного способа является то, что он осуществляет управление процессом проходки только в одной плоскости, проходящей через обводной блок и точку крепления каната к пневмопробойнику. Такой способ управления пневмопробойником позволяет искривлять скважину, но не обеспечивает гарантированной возможности ее выхода в заданную проектом перехода точку.
Технической задачей, решаемой предлагаемым изобретением, является обеспечение гарантированного выхода скважины в заданную проектом перехода точку.
Она решается за счет того, что в известном способе управления пневмопробойником, включающем операции проходки пионерной скважины, соединения пневмопробойника с дополнительным силовым органом посредством гибкой связи и непрерывного управляющего воздействия на пневмопробойник дополнительного силового органа через предварительный связующий канал, которым служит пионерная скважина, согласно изобретению после первой проходки скважины соединяют центральную часть носовой оконечности пневмопробойника с дополнительным силовым органом, затем ориентируют управляющее воздействие дополнительного силового органа по трассе перехода и производят проходку с образованием гибкой связью в грунте нового связующего канала.
Соединение центральной части носовой оконечности пневмопробойника с дополнительным силовым органом позволяет достигнуть ориентации по оси проходки положения конечной точки гибкой связи. Управляющее воздействие ориентируют со стороны выходного устья скважины положением обводного блока или дополнительного силового органа, обеспечивая передачу рабочего усилия гибкой связи по оси проектной трассы перехода. Управляющее воздействие на пневмопробойник посредством гибкой связи, осуществляемое при повторной проходке скважины, приводит к сокращению длины гибкой связи за счет натяжения и образованию в грунтовом массиве нового связующего канала, соединяющего по прямой линии центры входного и выходного (проектного) устьев скважины. Так как управляющее воздействие на пневмопробойник дополнительного силового органа осуществляют непрерывно, то достигается получение скважины, гарантированно выходящей в заданную проектом точку. При этом отсутствует необходимость контроля положения пневмопробойника в грунте в процессе образования скважины.
Сущность предлагаемого изобретения иллюстрируется чертежами.
На фиг. 1 приведены основные операции способа управления пневмопробойником для получения прямолинейной скважины: операция проходки пионерной скважины (фиг. 1, а); соединение по пионерной скважине пневмопробойника с дополнительным силовым органом гибкой связью и ориентирование управляющего воздействия по оси проектной трассы перехода (фиг.1, б); образование в грунтовом массиве нового связующего канала (фиг.1, в); проходка скважины при непрерывном управляющем воздействии на пневмопробойник дополнительного силового органа (фиг.1, г).
Управляющее воздействие на пнемвопробойник дополнительного силового органа осуществляется в плоскости, условно проходящей через три точки: А - центр входного устья скважины, В - центр выходного устья пионерной скважины, С - выходная точка оси проектной трассы перехода. Естественно, положение плоскости управляющего воздействия может быть любым. На чертежах показано ее вертикальное положение.
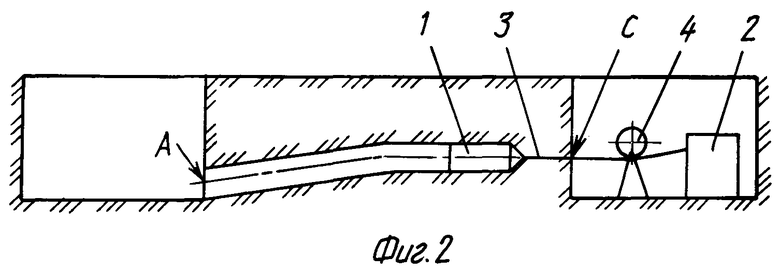
На фиг. 2 показан вариант получения криволинейной скважины.
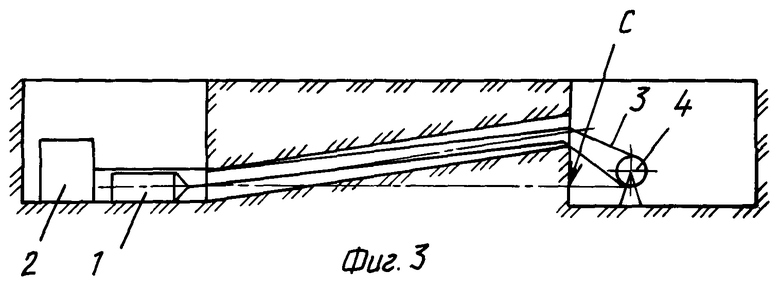
На фиг. 3. показана организация гибкой связи пневмопробойника с дополнительным силовым органом при его установке со стороны входного устья скважины.
Способ осуществляется следующим образом.
При производстве подземных работ с двух сторон сооружения, под которым выполняется переход, отрывают два приямка - входной и выходной. Из входного приямка запускают пневмопробойник 1. Если скважина вышла в выходной приямок в непроектную точку B (фиг.1, а), то в этом приямке устанавливают дополнительный силовой орган 2, например лебедку, домкрат и т.п., а пневмопробойник возвращают к месту старта (фиг.1, б). Пионерную скважину используют в качестве предварительного связующего канала, организуя в ней гибкую связь 3, например проложив канат, соединенный с дополнительным силовым органом. Далее осуществляют ориентацию управляющего воздействия на пневмопробойник дополнительного силового органа для обеспечения гарантированного выхода скважины в заданную проектом точку С. Для этого сначала соединяют центральную часть носовой оконечности пневмопробойника с конечной точкой гибкой связи. При повторном запуске пневмопробойника этим достигается ориентация гибкой связи во входном устье скважины по оси проходки. Со стороны выходного приямка управляющее воздействие ориентируют положением обводного блока 4 или дополнительного силового органа (ориентация положением дополнительного силового органа на фиг. 1 не показана). Обводной блок устанавливают так, чтобы ось набегающей ветви гибкой связи находилась на оси проектной трассы перехода. Во втором случае - дополнительный силовой орган устанавливают так, чтобы его рабочее усилие передавалось пневмопробойнику через гибкую связь по оси проектной трассы перехода. Далее включают дополнительный силовой орган и пневмопробойник повторно запускают в скважину (фиг.1, в). Гибкая связь натягивается и образует в грунте новый связующий канал, соединяющий по прямой линии центр входного устья скважины (точку А) с проектной точкой ее выхода (С). Пионерная скважина, находящаяся при повторной проходке пневмопробойника в зоне интенсивного уплотнения, разрушается и заваливается грунтом. Управляющее воздействие на пневмопробойник осуществляют непрерывно, поэтому он образует в грунте скважину, гарантированно выходящую в заданную проектом точку С (фиг. 1, г). Для ускорения процесса прорезания гибкой связью грунта (образования нового связующего канала) на начальной стадии управляющего воздействия на пневмопробойник дополнительного силового органа возможна работа пневмопробойника на пониженном давлении сжатого воздуха.
При повторной проходке управляющее воздействие возможно прикладывать к пневмопробойнику 1 после проходки им некоторого расстояния по пионерной скважине. Это позволяет получить криволинейную скважину, ось которой выходит в проектную точку С (фиг.2). Для получения криволинейной скважины возможно также последовательно изменять ориентацию управляющего воздействия посредством перестановки в выходном приямке обводного блока 4 или дополнительного силового органа 2.
В случае затруднений установки в выходном приямке дополнительного силового органа 2, например из-за стесненных условий, его монтируют в месте старта (фиг. 3). Управляющее воздействие на пневмопробойник 1 осуществляют при помощи гибкой связи 3 (например, каната) следующим образом. Канат прокладывают в пионерной скважине, пропускают его через обводной блок 4, расположенный в выходном приямке, возвращают обратно во входной приямок и соединяют с центральной частью носовой оконечности пневмопробойника. Обводной блок устанавливают так, чтобы ось набегающей ветви гибкой связи находилась на оси проектной трассы перехода. При повторной проходке, благодаря наличию гибкой связи между пневмопробойником и дополнительным силовым органом и вследствие непрерывного управляющего воздействия на пневмопробойник дополнительного силового органа через гибкую связь, в грунте образуется новый связующий канал, имеющий два русла - основное, расположенное по оси проходки и используемое для передачи управляющего воздействия на пневмопробойник, и вспомогательное, через которое передается натяжное усилие дополнительного силового органа. Этот вариант реализации предлагаемого способа целесообразно применять при проходках прямолинейных скважин.
Способ прошел практическую проверку при выполнении нескольких подземных переходов и показал высокую эффективность.
Изобретение относится к технологии строительных работ и может быть использовано для выполнения подземных переходов с помощью пневмопробойников. Сущность изобретения заключается в управлении пневмопробойником, включающем операции проходки пионерной скважины, соединения пневмопробойника с дополнительным силовым органом посредством гибкой связи и непрерывного управляющего воздействия на пневмопробойник дополнительного силового органа через предварительный связующий канал, которым служит пионерная скважина, согласно изобретению после первой проходки скважины соединяют центральную часть носовой оконечности пневмопробойника с дополнительным силовым органом, затем ориентируют управляющее воздействие дополнительного силового органа по трассе перехода и производят повторную проходку с образованием гибкой связью в грунте нового связующего канала. Предложенный способ позволяет управлять направлением движения пневмопробойника в грунте для получения скважины, гарантированно выходящей в заданную точку, при этом отсутствует необходимость контроля его положения в процессе проходки. 3 ил.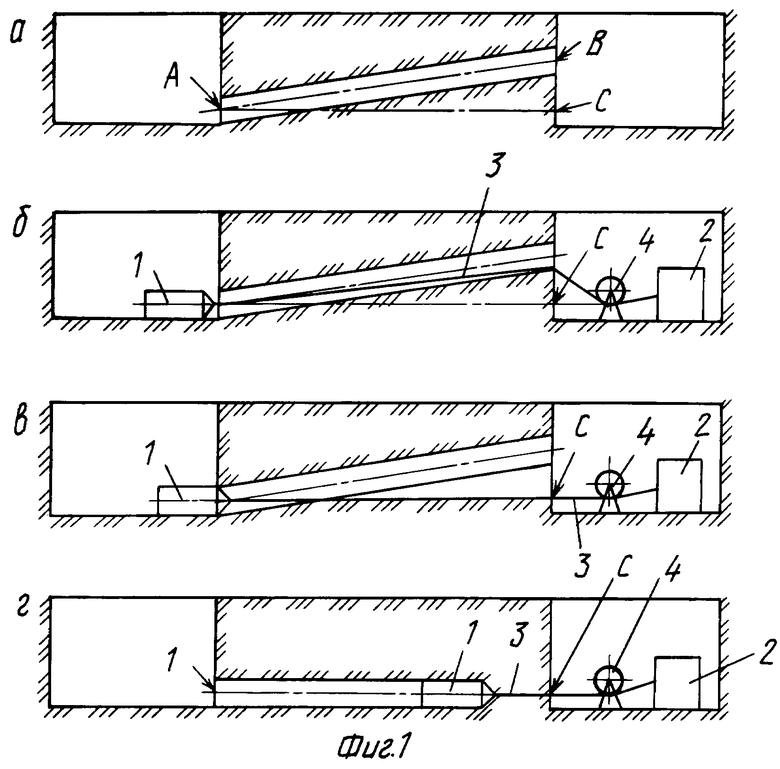
Способ управления пневмопробойником, включающий операции проходки пионерной скважины, соединения пневмопробойника с дополнительным силовым органом посредством гибкой связи и непрерывного управляющего воздействия на пневмопробойник дополнительного силового органа через предварительный связующий канал, которым служит пионерная скважина, отличающийся тем, что после первой проходки скважины соединяют центральную часть носовой оконечности пневмопробойника с дополнительным силовым органом, затем ориентируют управляющее воздействие дополнительного силового органа по трассе перехода и производят повторную проходку с образованием гибкой связью в грунте нового связующего канала.
| Устройство для образования скважин в грунте | 1980 |
|
SU939668A2 |
| УСТРОЙСТВО для ОБРАЗОВАНИЯ СКВАЖИНЫ В ГРУНТЕ | 0 |
|
SU292526A1 |
| СПОСОБ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ | 0 |
|
SU360447A1 |
| Способ образования скважин в грунте | 1967 |
|
SU533057A1 |
| Устройство для образования скважины в грунте | 1969 |
|
SU604923A1 |
| Устройство для образования скважин в грунте | 1977 |
|
SU628245A1 |
| Устройство для образования скважин в грунте | 1980 |
|
SU985205A2 |
| Устройство для образования скважин в грунте | 1991 |
|
SU1838515A3 |
| Способ образования скважин в грунте | 1990 |
|
SU1838517A3 |
| US 5597046, 28.06.97. | |||

