Данное предлагаемое изобретение относится к экологии, преимущественно к области ликвидации техногенных скоплений нефтепродуктов с поверхности грунтовых вод первого водоносного горизонта от дневной поверхности, как правило, на весьма малых глубинах, что является особой спецификой решаемой проблемы, и может использоваться в отраслях промышленности, которые имеют дело с добычей, переработкой, транспортированием или хранением жидких углеводородов (нефти, конденсата, керосина, бензина, масел и т.д.), особенно в условиях размещения населенных пунктов на территории, находящейся в контуре распространения техногенных скоплений.
Известен способ управления электронасосами при эксплуатации малодебитных скважин, характеризующийся периодической работой электронасосов с отключением приводного электродвигателя при заданном значении давления на входе насоса и последующем запуске по истечении установленной для данной скважины продолжительности технологической паузы (см. Богданов А.А. Погружные центробежные насосы, - М.: Гостехиздат, 1957, с. 126-129).
Недостатками данного способа является ограничение регулирования производительности насоса и сложность задания продолжительности технологической паузы, в течение которой происходит слив жидкости из подъемных труб в скважину и восстановление притока пластовой жидкости, что не обеспечивает эффективного регулирования режимов эксплуатации скважины по производительности и надежности работы электрооборудования.
Известен также способ управления электронасосом с частотно-регулируемым приводом при эксплуатации малодебитной скважины (см. АС СССР N 1262026, М. кл. E 21 B 43/00, опубл. 1986 г.), характеризующийся регулированием скорости притока жидкости из пласта в скважину путем периодического повторения циклов, каждый из которых состоит из последовательно осуществляемых процессов запуска насоса при увеличивающейся частоте питающего напряжения, подачи жидкости насосом в колонну подъемных труб при повышенной в сравнении с номинальным значением частоте и уменьшения до нуля подачи насоса путем снижения частоты питающего напряжения после достижения заданной величины давления в колонне подъемных труб с последующим отключением насоса и сливом жидкости из колонны труб через насос в скважину.
Недостатком известного способа является ограничение притока жидкости из пласта в скважину в результате систематического слива жидкости из колонны подъемных труб в скважину и неконтролируемость процесса восстановления уровня жидкости в скважине после прекращения подачи насоса, а также снижение производительности и надежности работы электрооборудования из-за возможности чрезмерно частых включений и связанных с ними негативных последствий от переходных режимов.
В некоторой степени свободен от отдельных отмеченных выше недостатков известный по патенту Российской Федерации N 2057907, М. кл. E 21 B 43/00, опубл. 10.04.96 г. способ эксплуатации малодебитных скважин электронасосами с частотно-регулируемым приводом, характеризуемый регулированием скорости притока жидкости из пласта в скважину путем периодического повторения циклов, каждый из которых состоит из последовательно осуществляемых процессов запуска насоса при увеличивающейся частоте питающего напряжения, подачи жидкости насосом в колонну подъемных труб при повышенной по сравнению с номинальным значением частоте и уменьшения до нуля подачи насоса путем снижения частоты питающего напряжения после достижения заданной величины давления в колонне подъемных труб с последующим отключением насоса и сливом жидкости из колонны подъемных труб через насос в скважину, а также тем, что при прекращении подачи насоса в цикле предотвращают слив жидкости из колонны подъемных труб через насос в скважину путем регулирования напора, развиваемого насосом при нулевой подаче изменением частоты питающего напряжения в соответствии с восстановлением давления в скважине и в колонне подъемных труб, происходящем под действием притока жидкости из пласта. Возобновляют подачу насоса в цикле переводом его на повышенную частоту после заданного восстановления за счет притока пластовой продукции, но не позднее истечения заданного времени работы насоса в режиме нулевой подачи. Регулируют частоту напряжения в процессе восстановления в цикле из условия поддержания наибольшей частоты, при которой насос еще не возобновляет подачу жидкости.
Недостатком известного способа является неоптимальная производительность электронасоса и снижение надежности работы электрооборудования из-за возможности чрезмерно частых включений и связанных с ними негативных последствий от переходных режимов.
Наиболее близким по совокупности признаков и технической сущности к предлагаемому изобретению является способ управления погружными водо-нефтеподъемными электронасосами (см. Проспект фирмы "VITOL S.A.", Великобритания, 1994 г.), принятый в качестве прототипа.
Техническое решение-прототип представляет собой способ управления погружными водо-нефтеподъемными электронасосами, характеризующийся измерением уровней слоя нефтепродуктов, границы раздела водо-нефтяных фаз и слоя воды датчиками, помещенными в пробуренную в зоне скопления нефтепродуктов скважину, усилением сигналов этих датчиков с последующей подачей в блоки управления погружными электронасосами подавления зеркала воды и извлечения нефтепродуктов, производительность которых измеряется любым известным методом.
Недостатками технического решения, принятого в качестве прототипа являются: неоптимальная производительность электронасоса, снижение надежности работы электрооборудования, вследствие излишне частых включений и связанных с ними негативных последствий от переходных режимов, отсутствие критериев регулирования взаиморасположения погружных электронасосов подавления зеркала воды и извлечения нефтепродуктов.
Проблема, которую решает заявляемое изобретение, связана с особенностями эксплуатации малодебитных скважин, производительность которых столь мала, что выходит из области возможностей согласования с производительностями электронасосов, пробуренных в зоне техногенных скоплений нефтепродуктов и предназначенных для экологической очистки загрязненных территорий. Поэтому откачку жидкостей из таких скважин приходится периодически прекращать с целью необходимого накопления нефтепродуктов в скважине за счет притока пластовой жидкости, в том числе воды, поступающей к скважине, в связи с чем и возникает потребность таким образом согласовать взаиморасположение и время работы погружных электронасосов, чтобы максимальная производительность извлечения нефтепродуктов обеспечивалась при минимальном числе включений электронасосов в рабочем цикле электрооборудования или, что эквивалентно, при максимальной продолжительности включения, что существенным образом отразится на повышении его надежности, долговечности и времени безотказной работы.
Таким образом, задачей настоящего изобретения является обеспечение максимальной производительности извлечения нефтепродуктов и повышение надежности работы, а также ресурса электрооборудования за счет повышения информативности способа управления и уменьшения негативного действия переходных режимов.
Поставленная задача решается тем, что известный способ управления водо-нефтеподъемными погружными электронасосами, характеризующийся измерением уровней слоя нефтепродуктов, раздела водо-нефтяных фаз и слоя воды датчиками, помещенными в скважину, последующей подачей измеренных сигналов в блоки управления погружными электронасосами подавления зеркала воды и извлечения нефтепродуктов и учетом объема работы каждого из электронасосов, согласно изобретению, дополнен тем, что измеряется продолжительность включения в рабочем цикле электронасоса извлечения нефтепродуктов, который размещают на уровне раздела фаз, а глубину погружения электронасоса подавления зеркала воды с относящимися к нему датчиками выбирают, исходя из максимума объема работы электронасоса извлечения нефтепродуктов и продолжительности его включения в рабочем цикле.
При использовании предлагаемого способа управления водо-нефтеподъемными погружными электронасосами, извлекающими техногенные скопления нефтепродуктов, достигается оптимизация процесса экологической очистки путем обеспечения максимально возможной для данных геологических условий производительности извлечения нефтепродуктов при минимальном уровне переходных процессов в электрооборудовании, что существенно повышает надежность работы и ресурс последнего.
Требуемый эффект реализуется за счет использования дополнительной информации, получаемой от измерения продолжительности включения электронасоса извлечения нефтепродуктов в его рабочем цикле, что позволяет не только минимизировать число его включений, но и обеспечить периодическую подрегулировку взаиморасположения электронасосов. Достигаемая при этом максимальная производительность извлечения нефтепродуктов обеспечивается за счет согласования параметров работы погружных электронасосов извлечения нефтепродуктов и подавления зеркала воды.
Существенность отличительных признаков предлагаемого способа, таких как:
а) измерение продолжительности включения в рабочем цикле электронасоса извлечения нефтепродуктов,
б) размещение электронасоса извлечения нефтепродуктов на уровне раздела фаз,
в) выбор глубины погружения электронасоса подавления зеркала воды с относящимися к нему датчиками, исходя из максимума объема работы электронасоса извлечения нефтепродуктов и продолжительности его включения в рабочем цикле, можно доказать следующим образом.
Время рабочего цикла (Tц) складывается из времени извлечения нефтепродуктов (Tизв) и времени их накопления (Tн) для следующего цикла. Время извлечения нефтепродуктов определяется объемом их накопления в скважине, а также производительностью электронасоса извлечения нефтепродуктов при существующем гидросопротивлении его магистрали и высоте подъема, а время накопления, при отсутствии электронасоса подавления зеркала воды, максимально, поскольку определяется только дебитом скважины по нефтепродукту. Продолжительность включения (ПВ - выраженная в относительных единицах или процентах) электрооборудования в этом случае минимальна и равна:
ПВmin = Tизв/Tц = Tизв/(Tтmax+Tизв).
При подключении в работу системы электронасоса подавления зеркала воды время накопления уменьшается за счет приноса части нефтепродукта водой и будет зависеть от глубины расположения этого насоса и его производительности. Таким образом, регулируя глубину погружения и объем откачиваемой электронасосом подавления зеркала воды жидкости, проводится управление параметрами создаваемой депрессионной воронки, в которую стекаются улавливаемые нефтепродукты. Выбирая взаиморасположение электронасоса извлечения нефтепродуктов и электронасоса подавления зеркала воды время накопления можно максимально уменьшить, добившись тем самым максимальной продолжительности включения электрооборудования:
ПВmax = Tизв/(Tнmin+Tизв),
при которой обеспечивается и максимальная производительность извлечения нефтепродуктов из зоны техногенного их скопления, и оптимальная эксплуатация электрооборудования в части его ресурса, энергопотребления и других факторов.
На фиг. 1 показана схема расположения оборудования, реализующего технологические операция заявляемого способа, на фиг. 2 - структурная схема системы управления погружными водо-нефтеподъемными электронасосами.
Система, реализующая предложенный способ управления водо-нефтеподъемными погружными электронасосами, содержит погружной электронасос 1 подавления зеркала воды и погружной электронасос 2 извлечения нефтепродуктов, подключенные к силовому коммутатору 3 и силовому коммутатору 4 соответственно, которые в свою очередь связаны с блоками управления 5, 6 режимами работы электронасосов 1, 2. На корпусе электронасоса 1 смонтирован фильтр 7 предварительной очистки, предназначенный для предотвращения попадания твердых частиц взвеси в откачиваемую воду. На корпусе электронасоса 2 смонтирован частично гидрофобный фильтр 8 предварительной очистки, задерживающий частицы воды от попадания в откачиваемые нефтепродукты. Вход блока 5 связан с выходом селектора 9 толщины водяного слоя, в качестве которого использован блок емкостных датчиков 10-1 - 10-5. Вход же блока управления 6 связан с выходом селектора 11 толщины слоя нефтепродуктов, в качестве которого использован блок поплавковых герконовых датчиков (ПГД) 12-1 - 12-5. В селектор 11 введен также емкостной датчик 13, контролирующий уровень раздела фаз, причем выход 14 датчика 13 параллельно подсоединен к выходу 15 ПГД 12-1. Система управления снабжена счетчиком 16 числа включений электронасоса 2 в единицу времени, что позволяет определять продолжительность включения в рабочем цикле, задаваемом таймером 17. Измерение объемов работы погружного электронасоса 1 подавления зеркала воды и погружного электронасоса 2 извлечения нефтепродуктов осуществляется расходомерами 18 и 19 соответственно. Блок индикации и контроля 20 режимов работы обеспечивает оперативный мониторинг за состоянием системы управления и обеспечивает получение информации о производительности и частоте включений электронасосов 1 и 2.
Предварительный монтаж в скважине оборудования, посредством которого реализуется заявляемый способ управления водо-нефтеподъемными погружными электронасосами, извлекающими техногенные скопления нефтепродуктов, размещение его составных частей осуществляется в соответствии с гидротехническим состоянием скважины, оцениваемым вспомогательным измерительным оборудованием.
В скважину, содержащую техногенные загрязнения в виде нефтепродуктов, находящихся на поверхности пластовой воды, опускают электронасос 2 извлечения нефтепродуктов на глубину, соответствующую расположению уровня раздела фаз, который контролируется с помощью емкостного датчика 13. Затем в скважину погружают электронасос 1 вместе с блоком емкостных датчиков 10-1 - 10-5 на расчетную глубину, обеспечиваемую создание потребной депрессионной воронки.
Способ управления водо-нефтеподъемными погружными электронасосами реализуется следующим образом.
При включении системы в работу, в зависимости от наполнения скважины и настройки режима ее работы, происходит включение одного из электронасосов 1, 2, либо обоих вместе. Команды на включение электронасосов 1, 2 подаются от блоков управления 5, 6 соответственно через силовые коммутаторы 3, 4.
Управляющие сигналы, поступающие в блоки 5, 6, формируются посредством блока емкостных датчиков 10-1 - 10- 5, автономного датчика 13 и блока поплавковых датчиков 12-1 - 12-5. При этом, наряду с датчиком 13, контроль за уровнем раздела фаз производится посредством селектора 9 толщины водяного слоя с помощью блока емкостных датчиков 10-1 - 10-5. При достижении уровнем раздела фаз нижнего емкостного датчика 10-1 электронасос 1 отключается и откачивание воды из скважины прекращается.
В результате образования депрессионной воронки заданных параметров происходит активное привлечение в скважину воды вместе с нефтепродуктами, т. е. понижение зеркала водяного слоя способствует образованию в скважине слоя нефтепродуктов в несколько раз большего по сравнению с естественным. При заполнении скважины, в соответствии с настройкой системы, происходит либо повторное включение электронасоса 1, которое приводит к повторному циклу откачивания воды из скважины, либо включение электронасоса 2, обеспечивающего откачку накопившихся в скважине нефтепродуктов. Включение электронасоса 2 определяется расположением верхней границы нефтепродуктов по отношению к размещению селектора 11, снабженного поплавковыми герконовыми датчиками 12-1 - 12-5.
Предотвращает попадание воды в магистрали электронасоса 2 емкостной датчик 13 контроля уровня раздела фаз, с выхода 14 которого поступает сигнал в блок управления 6 на отключение электронасоса 2 при появлении воды в зоне размещения датчика 13.
Счетчик числа включений 16 электронасоса 2 позволяет определять в сочетании с таймером 17 продолжительность его включения в рабочем цикле, а по внешней характеристике насоса и известном гидросопротивлении магистрали косвенно учитывать объем откачиваемых нефтепродуктов, коррелируя его с показаниями расходомера 19.
Накопленная за несколько рабочих циклов информация о производительности электронасоса 2 -(Q/t), где Q - объем откачиваемых нефтепродуктов, t - время работы электронасоса, а также продолжительности его включений (ПВ) записывается в блоке индикации и контроля 20 режимов работы и сопоставляется с глубинным взаиморасположением электронасосов 1 и 2 (h12). По результатам измерений расходомера 19 объемов работы электронасоса 2 для нескольких (не менее 5-7) глубин взаиморасположения - h12 известными методами оптимизации функций двух переменных выбирается h12опт, обеспечивающее обобщенный оптимум. По мере эксплуатации скважины накапливается статистика по изменению производительности электронасоса 2 и его ПВ, по результатам которой производится периодическое подрегулирование глубинного взаиморасположения электронасосов 1 и 2 (h12), исходя из выбранных критериев управления и складывающейся на текущий период времени гидрологической обстановки.
В целом предложенный способ управления водо-нефтеподъемными электронасосами позволяет оптимизировать процесс извлечения нефтепродуктов путем более точной настройки и согласования режимов работы электронасосов, а также адаптивного контроля за гидротехническим состоянием скважины, повысив при этом надежность работы и ресурс технологического электрооборудования, а также снизив энергоемкость потребления в динамических (переходных) режимах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗВЛЕЧЕНИЯ ЖИДКИХ НЕФТЕПРОДУКТОВ С ПОВЕРХНОСТИ ГРУНТОВЫХ ВОД И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2237800C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМИ ВОДОНЕФТЕПОДЪЕМНЫМИ ЭЛЕКТРОНАСОСАМИ | 1998 |
|
RU2155265C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И ЗАЩИТЫ ПОГРУЖНЫХ ЭЛЕКТРОНАСОСОВ | 1998 |
|
RU2154191C2 |
| СИСТЕМА ЗАЩИТЫ ПОГРУЖНЫХ ВОДО-НЕФТЕПОДЪЕМНЫХ ЭЛЕКТРОНАСОСОВ | 2005 |
|
RU2302552C2 |
| СПОСОБ ИЗВЛЕЧЕНИЯ ЖИДКИХ НЕФТЕПРОДУКТОВ С ПОВЕРХНОСТИ ГРУНТОВЫХ ВОД И СИСТЕМА ИНЖЕНЕРНОЙ ЗАЩИТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2438986C2 |
| СИСТЕМА ЗАЩИТЫ И УПРАВЛЕНИЯ ПОГРУЖНЫМИ ЭЛЕКТРОНАСОСАМИ | 2005 |
|
RU2302555C2 |
| СПОСОБ ИЗВЛЕЧЕНИЯ ТЕХНОГЕННЫХ СКОПЛЕНИЙ НЕФТЕПРОДУКТОВ С ПОВЕРХНОСТИ ГРУНТОВЫХ ВОД | 1999 |
|
RU2162915C2 |
| СПОСОБ ЭКОЛОГИЧЕСКОЙ ЗАЩИТЫ ТЕРРИТОРИЙ ОТ ЗАГРЯЗНЕНИЯ НЕФТЕПРОДУКТАМИ | 1998 |
|
RU2142415C1 |
| СПОСОБ ОЧИСТКИ ВОДЫ И ГРУНТА ОТ ЗАГРЯЗНЕНИЯ | 2004 |
|
RU2270729C2 |
| Способ добычи пластовой жидкости с высоким содержанием газа с помощью установки, состоящей из трех насосных секций | 2022 |
|
RU2808827C1 |

Способ управления водо-нефтеподъемными погружными электронасосами относится к экологии, а именно к способам ликвидации техногенных скоплений нефтепродуктов с поверхности грунтовых вод. Способ характеризуется измерением уровней слоя нефтепродуктов, раздела водонефтяных фаз и слоя воды датчиками, помещенными в скважину, с последующей подачей измеренных сигналов в блоки управления погружными электронасосами подавления зеркала воды и извлечения нефтепродуктов и учетом объема работы каждого из электронасосов. При этом измеряют продолжительность включения в рабочем цикле электронасоса извлечения нефтепродуктов, который размещают на уровне раздела фаз, а глубину погружения электронасоса подавления зеркала воды с относящимися к нему датчиками выбирают, исходя из максимума объема работы электронасоса извлечения нефтепродуктов и продолжительности его включения в рабочем цикле. При использовании способа оптимизируется процесс экологической очистки грунтовых вод путем обеспечения максимальной производительности извлечения нефтепродуктов и повышения надежности работы электрооборудования. 2 ил.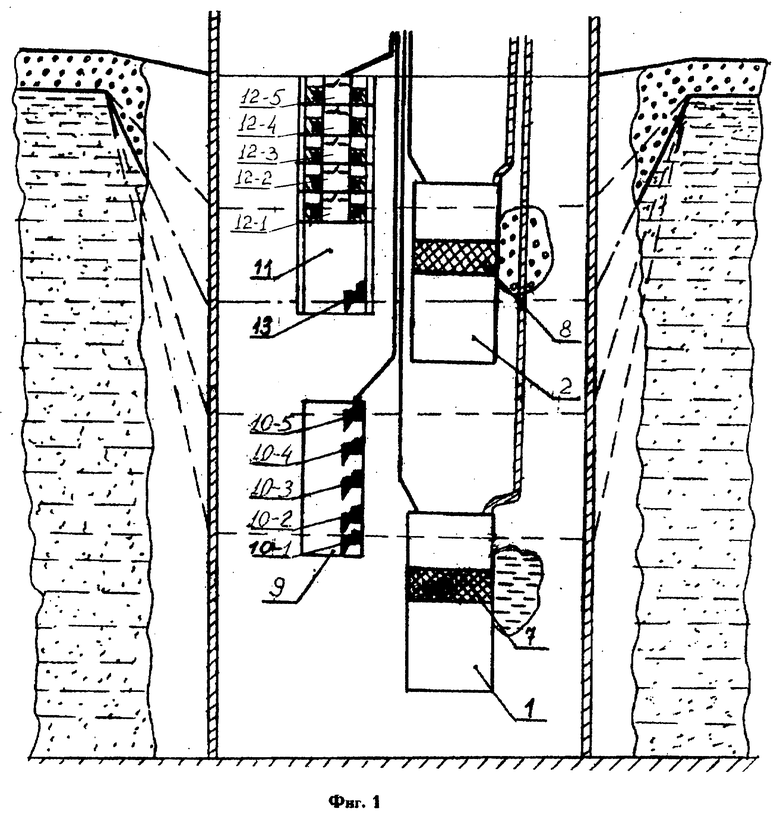
Способ управления водо-нефтеподъемными погружными электронасосами, характеризующийся измерением уровней слоя нефтепродуктов, раздела водо-нефтяных фаз и слоя воды датчиками, помещенными в скважину, с последующей подачей измеренных сигналов в блоки управления погружными электронасосами подавления зеркала воды и извлечения нефтепродуктов и учетом объема работы каждого из электронасосов, отличающийся тем, что измеряют продолжительность включения в рабочем цикле электронасоса извлечения нефтепродуктов, который размещают на уровне раздела фаз, а глубину погружения электронасоса подавления зеркала воды с относящимися к нему датчиками выбирают, исходя из максимума объема работы электронасоса извлечения нефтепродуктов и продолжительности его включения в рабочем цикле.
| Проспект фирмы "Vitol S.A.", GB, 1994 | |||
| Богданов А.А | |||
| Погружные центробежные насосы | |||
| - М.: Гостехиздат, 1951, с | |||
| Ударно-вращательная врубовая машина | 1922 |
|
SU126A1 |
| Способ эксплуатации скважинного насоса с частотно-регулируемым приводом | 1985 |
|
SU1262026A1 |
| СПОСОБ ЭКСПЛУАТАЦИИ МАЛОДЕБИТНОЙ СКВАЖИНЫ ЭЛЕКТРОНАСОСОМ С ЧАСТОТНО-РЕГУЛИРУЕМЫМ ПРИВОДОМ | 1993 |
|
RU2057907C1 |
| Устройство автоматического управления насосной станцией | 1984 |
|
SU1229440A1 |
| Устройство управления насосной станцией | 1984 |
|
SU1247584A1 |

