Предлагаемое изобретение относится к измерительной технике и может быть использовано в оптическом приборостроении в качестве датчиков углового рассогласования между оптическими осями, в частности активного и пассивного каналов системы наведения.
Известны многофункциональные активно-пассивные локационные системы, которые выполняют не только обзор пространства с выделением объектов, определением их координат и др. параметров (см., например, патенты США 4380391 НКИ 356-5 G 01 C 3/08, G 02 B 5/14, H 01 S 3/00, 1983 г.; 4298280 НКИ 356-5, 1983 г. ; 4401886 НКИ 250-203 G 01 C 1/00, 1983 г.), но и осуществляют операции автоматического распознавания объектов с последующим отслеживанием и наведением (см. патент США 4324491 НКИ 356-152 кл. G 01 В 11/26, F 41 G 7/00, G 01 I 1/20, 1982 г.).
Наиболее близким к заявляемому изобретению является последний из упомянутых выше патент США 4324491 "Двухрежимная система управления". Она содержит активный (лазерный) канал и пассивный (телевизионный) канал наблюдения с общим для обоих каналов кремниевым видиконом в качестве чувствительного элемента. Кроме этого, в нее входят не создающий изображения координатор, состоящий из четырехэлементного (квадрантного) приемника-обнаружителя, объединенного с четырьмя одноэлементными приемниками слежения, гирооптикой и электроникой, а также - коррелятор точечного объекта. В пассивном режиме оператор обнаруживает объект на визуальном дисплее, наводит координатор на объект помощью коррелятора и переключает систему в режим слежения. В активном режиме координатор принимает сигнал от объекта и определяет его местоположение на видиконе, при этом его сигналы отображаются на дисплее вместе с сигналами четырех приемников координатора. Точка максимальной корреляции отмечается на дисплее и указывает этим самым точку лазерного пятна и точку сопровождения объекта.
Но, несмотря на отмеченные достоинства, прототип не лишен и недостатков. Один из них заключается в том, что он ограничен в применении, так как работает только с помощью оператора и, как следствие этого, не может работать в автоматическом режиме. Другой состоит в том, что специальные условия эксплуатации, например, большой перепад температур, вибрационные и ударные нагрузки, могут привести к относительно большим отклонениям в угловом (до 10 угл. мин) и линейном положении оптических осей активного и пассивного каналов. К смещению оптических осей приводит и постепенный износ подвижных элементов следящей системы, погрешности, вносимые при изготовлении и др. Поэтому в подобных системах необходим контроль за углом рассогласования между указанными осями и его компенсация, так как отсутствие такового влечет за собой, например, расширение расходимости пучка осветителя и, естественно, уменьшение дальности действия.
Таким образом, целью предлагаемого изобретения является расширение функциональных возможностей и увеличение дальности действия.
Поставленная задача достигается тем, что в известную двухканальную систему наведения, содержащую последовательно осветитель, первый объектив, а также последовательно расположенные второй объектив, установленный со смещением относительно оси первого объектива и в ходе собственного излучения объекта, и многоэлементный фотоприемник, оптически сопряженный с квадрантным фотоприемником, первый блок выделения координат, последовательно соединенные пороговое устройство и второй блок выделения координат, при этом выход квадрантного фотоприемника соединен со входом первого блока выделения координат, а выход многоэлементного фотоприемника соединен со входом порогового устройства, дополнительно введены (см. п.1 формулы изобретения) первое и второе плоские зеркала с приводом вращения каждое, световозвращатель, ключ, последовательно соединенные первое запоминающее устройство и первый сумматор, последовательно соединенные второе запоминающее устройство и второй сумматор, при этом первый и второй выходы первого блока выделения координат соединены с первым и вторым входом ключа, управляющий вход которого соединен с дополнительным выходом порогового устройства, выходы ключа соединены со входами первого и второго запоминающих устройств, первый и второй выходы второго блока выделения координат соединены со вторыми входами первого и второго сумматора, соответственно, выход первого и второго сумматора соединен со входом привода вращения первого и второго плоского зеркала, соответственно, первое и второе плоские зеркала установлены между осветителем и первым объективом, а их отражающие поверхности обращены друг к другу и расположены под углом к оси первого объектива, световозвращатель установлен с частичным перекрытием полей зрения первого и второго объективов.
В частном случае (см.п.2 формулы изобретения) многоэлементный фотоприемник оптически сопряжен с квадрантным фотоприемником с помощью спектроделительной пластины.
В частном случае (см.п.3 формулы изобретения) отражающие поверхности первого и второго плоских зеркал расположены под углом 45 градусов к оси первого объектива.
И наконец, в частном случае (см.п.4 формулы изобретения) сетовозвращатель может быть выполнен в виде триппель-призмы.
На чертеже представлен один из возможных вариантов выполнения блок-схемы предлагаемой двухканальной системы. На ней приняты следующие обозначения:
1 - осветитель, в качестве которого может быть использован лазер типа ЛТИПЧ-7 или ЛГИПЧ-8;
2 и 3- первое и второе плоское зеркало, соответственно с приводом вращения каждое, в качестве которого может быть использован двигатель типа ДБМ - 40;
4 - первый объектив, предназначенный для коллимирования лазерного пучка;
5 - триппель-призма, предназначена для отвода части коллимированного лазерного излучения на вход второго объектива;
6 - второй объектив, предназначенный для концентрации части коллимированного лазерного излучения на квадрантном приемнике 7;
7 - спектроделительная пластина;
8 - квадрантный фотоприемник, например, типа СИ-2;
9 - многоэлементный фотоприемник, например, типа инфракрасной матрицы на основе InSb (см. журнал SPIE т. 890 и 1157);
10 - первый блок выделения координат, предназначенный для формирования на выходе своих балансных схем сигналов;
Ux1 = K•((U1+U4) - (U2+U3))/(U1+U2+US+U4)
Uy1 = K•((U1+U2) - (U3+U4))/(U1+U2+U3+U4).
и может быть выполнен на микросхемах серии 140УД6 по схеме, приведенной в справочнике под ред.Л.З.Криксунова "Авиационные системы информации оптического диапазона", М., "Машиностроение", 1985 г., стр. 147-148;
11 - электронный ключ, предназначенный для переключения системы в режим автоматической юстировки каналов, в качестве которого может быть использован ключ типа 590КН2; 12 и 15 - первое и второе ЗУ соответственно, предназначенное для запоминания координат возможного рассогласования каналов, и может быть выполнено на основе устройства выборки и хранения серии 1100СК2;
14 - пороговое устройство;
15 - второй блок выделения координат, предназначенный для выделения сигналов Ux2 и Uy2 по номеру освещенного элемента фотоп- риемника 8 и по измерению времени от срабатывания порогового устройства и может быть выполнен на микросхемах типа 521САЗ и счетчиках серии 155 по схеме, описанной в выше упомянутом справочнике на стр. 133;
16 и 17 - первый и второй сумматоры, предназначенные для сложения сигналов (Ux1 + Ux2) и (Uy1 + Uy2), соответственно, и может быть выполнен на микросхемах серии 155ИМ1.
Вначале следует заметить, что угол наклона плоских зеркал к оптической оси первого объектива устанавливается в зависимости от расстояния между этой осью и оптической осью второго объектива, угла расходимости лазерного пучка и др. В исходном состоянии перед началом работы объективы должны быть съюстированы таким образом, чтобы изображение тела свечения лазера находилось в центре квадрантного фотоприемника 8, а оптическая ось второго объектива 6 совпадала с центром многоэлементного фотоприемника 9.
При появлении объекта в поле обзора второго объектива 6 (см. чертеж) вся система переходит в рабочее состояние. В этом случае лазер 1 излучает импульсный поток, основная часть которого после отражения от плоских зеркал 2 и 3 направляется на исследуемый объект. Другая же его часть с помощью триппель-призмы 5 возвращается, но на входной зрачок второго объектива 6. Последний фокусирует лазерное излучение, прошедшее и спектроделитель 7 на квадрантном фотоприемнике 8, Если при этом оптическая ось второго объектива 6 параллельна оптической оси первого объектива 4, то центр изображения лазерного пучка совпадает с центром квадрантного фотоприемника 8. А это означает, что поток излучения равномерно распределен между его квадрантами, и электрические импульсы с выхода фотоприемника 8 отсутствуют. Соответственно, отсутствуют сигналы Ux1 и Uy1 на выходе первого блока выделения координат 10, на первом 12 и втором 13 запоминающих устройствах, а также и на первых входах первого 16 и второго 17 сумматоров. Это означает, что оптические оси активного и пассивного каналов съюстированы.
Если же во время прохождения лазерного импульса по цепи блоков 1-13 или же после обнаружения объекта его собственное излучение попадает в поле зрения второго объектива 6, то после отражения от спектроделительной пластины 7 оно фокусирется на одной из чувствительных площадок многоэлементного фотоприемника 9. С выхода последнего электрический импульс, пропорциональный угловым координатам объекта, поступает на вход порогового устройства 14. При превышении выбранного порога выходной сигнал последнего направляется во второй блок выделения координат 15. С выхода его сигналы Ux2 и Uy2, соответствующие координатам объекта, поступают на вторые входы первого 16 и второго 17 сумматоров.
Кроме этого, выходным сигналом порогового устройства 14 размыкается ключ 11. В результате срабатывают первое и второе ЗУ. Но так как в них хранилась информация о сигналах Ux1 = 0 и Uy1 = 0, то на первых входах первого и второго сумматоров сигналы отсутствуют, то это означает, что на входы приводов плоских зеркал 2 и 3 приходят сигналы Ux = Ux2 и Uy = Uy2. Под воздействием этих сигналов указанные зеркала поворачиваются в двух плоскостях до такого положения, когда ось лазерного излучения, коллимированного объективом 4. будет направлена на исследуемый объект.
Проведя исследования с первый объектом, система переходит в режим поиска следующего объекта. В этом режиме на входе второго объектива 6 отсутствует излучение, следовательно отсутствует сигнал с выхода многоэлементного фотоприемника 9. В результате ключ 11 замыкается. Если же за время поиска второго объекта исследований из-за температурных, механических или других воздействий произойдет разъюстировка оптических осей первого и второго объективов, то предлагаемая система работает следующим образом.
Лазерное излучение проходит тот же путь от блока 1 до блока 8. Но в этом случае изображение пятна лазерного пучка смещается относительно нулевого положения квадрантного фотоприемника 8. При таком смещении изображения относительно нулевого положения происходит перераспределение потоков излучения между отдельными квадрантами, и на его выходе возникает сигнал, который подается на вход первого блока выделения координат 10. С выходов блока выделения координат 10 сигналы Ux1 и Uy1 подаются на первый и второй входы ключа 11, запоминаются первым 12 и вторым ЗУ.
Как только интересующий нас объект исследований будет найден, то на выходе фотоприемника 9 появляется сигнал, которым размыкается ключ 11. Вследствие этого сигналы с выходов первого и второго ЗУ поступают на первые входы первого 16 и второго 17 сумматоров соответственно. В них происходит сложение сигналов:
Ux = Ux1 + Ux2,
Uy = Uy1+ Uy2.
Суммарные сигнала Ux и Uy подаются на входы соответствующих приводов плоских зеркал 2 и 3. В результате ось лазерного пучка так же, как и в первом случае, направляется на исследуемый объект. - Следует отметить, что координаты рассогласования лазерного и пассивного каналов, снимаемые с квадрантного фотоприемника 8, хранятся в соответствующих ЗУ до следующего режима проверки соосности осей названных каналов.
Таким образом, в предлагаемой двухканальной системе происходит автоматический поиск объекта исследований и автоматическая компенсация разъюстировки осей двух оптических каналов.
Техническая эффективность предлагаемой системы видна из следующих довольно простых рассуждений. Известно, что для обеспечения необходимой дальности действия требуемая мощность излучения лазера P обратно пропорциональна телесному углу расходимости W. Увеличение этого угла, скажем, на 10% влечет за собой соответствующие уменьшение мощности излучения на приемнике излучения и, как следствие этого, уменьшение дальности действия системы как минимум на 10%.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКАНАЛЬНАЯ СИСТЕМА НАВЕДЕНИЯ | 2000 |
|
RU2180090C2 |
| ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 1992 |
|
RU2067290C1 |
| МНОГОКАНАЛЬНАЯ СИСТЕМА НАВЕДЕНИЯ | 2000 |
|
RU2199709C2 |
| КОСМИЧЕСКИЙ СКАНИРУЮЩИЙ ТЕПЛОПЕЛЕНГАТОР | 1992 |
|
RU2046369C1 |
| УСТРОЙСТВО ДЛЯ ФОТОМЕТРИРОВАНИЯ СВЕТОВЫХ ПУЧКОВ | 1992 |
|
RU2065583C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ОПТИЧЕСКИХ НЕОДНОРОДНОСТЕЙ | 1991 |
|
RU2018111C1 |
| ФОТОМЕТРИЧЕСКОЕ УСТРОЙСТВО | 1992 |
|
RU2065584C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КАЧЕСТВА СВЕТОВЫХ ПУЧКОВ | 1992 |
|
RU2065582C1 |
| СПОСОБ СОЗДАНИЯ ВРЕМЕННЫХ ЗАДЕРЖЕК СВЕТОВОГО ПОТОКА | 1995 |
|
RU2109257C1 |
| СПОСОБ ИЗМЕРЕНИЯ ОПТИЧЕСКИХ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ | 1992 |
|
RU2046320C1 |
Двухканальная система наведения может быть использована в измерительной технике, в частности в качестве датчика углового рассогласования между оптическими осями, например, активного и пассивного каналов системы наведения. Изобретение позволяет автоматически вести контроль за углом рассогласования между названными выше осями и осуществлять компенсацию этого рассогласования. 3 з.п.ф-лы, 1 ил.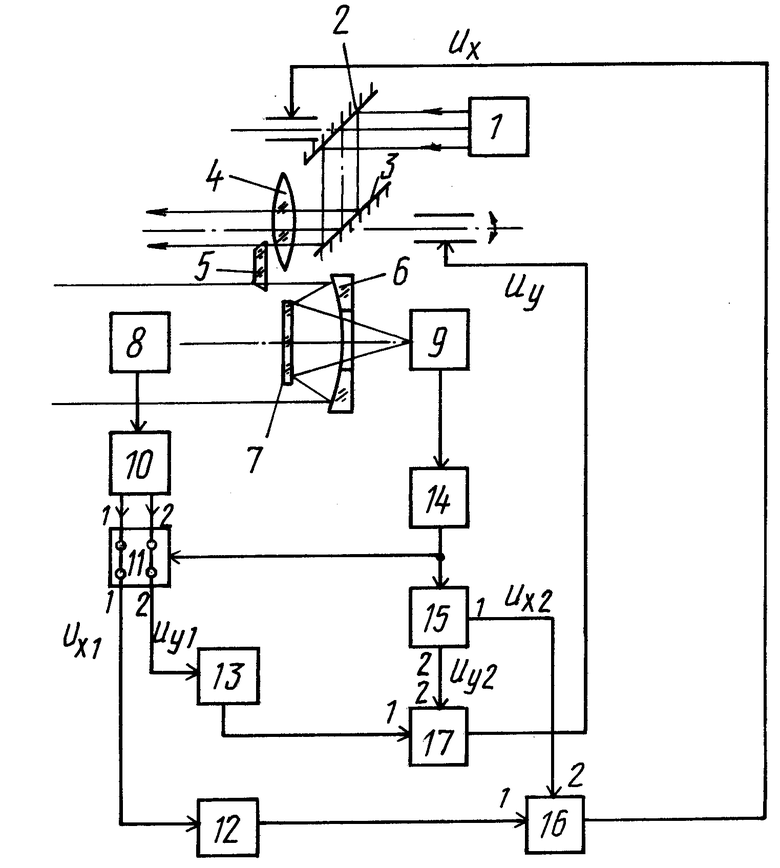
| US 4324491 A, 13.04.82 | |||
| US 4401886 A, 30.08.83 | |||
| US 4380391 A, 19.04.83 | |||
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА АВТОСОПРОВОЖДЕНИЯ | 1993 |
|
RU2081383C1 |
