Изобретение относится к области медицинской техники, физиотерапевтическим устройствам и предназначено для лечения кардиологических, онкологических заболеваний, заболеваний сосудов, опорно-двигательного аппарата, регресса воспалительных процессов и др. путем воздействия на больного переменным магнитным полем (МП).
Известна книга Г.Р.Соловьевой "Магнитотерапевтическая аппаратура" (М.: Медицина, 1991, 175 с.), в которой рассмотрен широкий набор магнитотерапевтических аппаратов и устройств, выпускавшихся в тот период отечественной и зарубежной промышленностью, а также краткая история развития магнитотерапевтических аппаратов. В частности, отмечается сделанная в 1903 г. и в течение многих лет не имевшая продолжения попытка магнитотерапии при воздействии вращающегося МП, создаваемого вращением электромагнита. Среди аппаратов, существовавших в период написания книги, - и постоянные магниты и простейшие магнитофорные аппликаторы, формирующие статические поля, и комплексные электронные аппараты, создающие МП со сложными пространственно- временными характеристиками.
В результате многочисленных экспериментов и клинических испытаний была показана более высокая эффективность лечебного воздействия аппаратов с переменным или прерывистым МП по сравнению с воздействием постоянным МП. Поэтому последующее развитие магнитотерапевтической техники шло по пути усложнения конструкций магнитных индукторов и электронных схем управления аппаратами с целью расширения пределов изменения параметров переменных МП, возбуждаемых токовыми обмотками индукторов, а также по пути разработки новых лечебных режимов работы электронных аппаратов. В частности, перспективным направлением явилось конструирование сложных магнитных индукторов с токовыми обмотками, создающих пространственно-однородное вращающееся МП в рабочем объеме, размеры которого позволяют осуществлять воздействие МП на все тело пациента.
На фоне значительных усилий, направленных на развитие сложных электронных устройств с токовыми обмотками возбуждения, программируемыми электронными схемами управления и энергоснабжения, переменных во времени и пространстве МП, были практически исключены из рассмотрения возможные конструкции аппаратов с постоянными магнитами. В то же время, могут быть предложены относительно простые конструкции магнитотерапевтических аппаратов на базе применения перемещающихся в пространстве по замкнутым траекториям систем постоянных магнитов, создающих переменное МП в рабочем объеме аппарата и обладающих во многих случаях определенными преимуществами перед аппаратами на основе электронных схем.
Известен аппарат по патенту RF 2578428 А1 (Rene Maguet, 26.09.86.). Этот аппарат, принятый в настоящей заявке за прототип, состоит из цилиндрического корпуса, в котором размещены электродвигатель, камера для магнитов, содержащая один или несколько постоянных магнитов. Согласно описанию постоянный магнит может быть намагничен либо вдоль, либо поперек продольной оси.
Аппарат по этому патенту обладает рядом недостатков. В частности, в патенте отсутствуют какие-либо упоминания об устройстве для размещения пациента. В качестве источника магнитного поля используются магниты (или одиночный магнит), не соединенные в систему постоянных магнитов, т.е. взаимное расположение, форма, размеры, намагниченность магнитов не позволяют создавать весь широкий набор конфигураций МП, который может оказаться полезным в современной магнитотерапии. Аппарат формирует только простейшие однополярные, симметричные импульсы колоколообразной формы с неизменной частотой их следования.
Между тем, согласно результатам последних исследований наиболее эффективными являются режимы, характеризующиеся изменением частоты следования магнитных импульсов в процессе лечебного воздействия и специальной формой импульсов. В частности, предпочтительна форма импульсов, близкая к пилообразной, сходной с формой нейроимпульсов.
По данным практической медицины магнитотерапия с применением переменного МП является достаточно эффективным методом при любой его конфигурации в рабочем объеме. Вопрос о сравнительной эффективности процесса лечения в зависимости от степени однородности МП в рабочем объеме аппарата остается до сих пор открытым, поскольку представление о повышенной лечебной эффективности неоднородных МП не подтверждено в физиотерапии прямыми сравнительными экспериментами и клиническими испытаниями. Между тем у пространственно-однородного МП есть принципиальное методологическое преимущество, заключающееся в однозначности самого понятия и, соответственно, в более высокой степени надежности воспроизведения полученных лечебных эффектов по сравнению со случаем градиентных МП. Когда же речь идет о неоднородном поле, необходимо определение закона пространственного распределения МП в рабочем объеме аппарата и строгое фиксирование положения тела (или сектора тела) больного относительно этого распределения. С другой стороны, создание аппаратов для формирования пространственно- однородного МП является более трудоемкой задачей, чем в случае неоднородного поля. В связи с этим до настоящего времени основное распространение в медицинских учреждениях получили аппараты с меняющимся во времени пространственно-неоднородным полем.
Техническим результатом настоящего изобретения является упрощение конструкции, снижение стоимости изготовления и эксплуатационных расходов, повышение надежности работы аппарата, создающего пространственно-неоднородное или однородное, вращающееся, колебательное или бегущее переменное МП в рабочем объеме аппарата. В качестве рабочего объема магнитотерапевтического аппарата можно использовать любую удобную для размещения больного (или какого-либо сектора его тела) часть пространства, в которой вблизи системы магнитов создается магнитная индукция с амплитудой, достаточной для выполнения лечебных процедур.
Технический результат достигается тем, что для формирования аппаратом переменного МП с требуемыми пространственно-временными характеристиками изготавливают систему постоянных магнитов (СПМ), фиксируемых относительно друг друга жесткими механическими связями. Под системой понимается совокупность некоторого числа постоянных магнитов, размещенных в виде мозаики с большей или меньшей плотностью на поверхности подвижного элемента конструкции. В процессе лечебного сеанса указанная система магнитов, как целое, совершает вращательное, колебательное или поступательное движение. Взаимное расположение постоянных магнитов, их форма, размеры и намагниченность, а также взаимное расположение устройства для размещения пациента и корпуса аппарата определяют конфигурацию МП в рабочем объеме аппарата в каждый момент времени, а программируемое перемещение СПМ в пространстве в целом создает эффект переменного МП. В соответствии с предлагаемым изобретением систему постоянных магнитов перемещают в пространстве при помощи привода, содержащего программируемое управляющее устройство. В качестве элемента связи между движителем привода и СПМ применяют бесконечные гибкие ленты, редукторы и т.п. Регулировку скорости перемещения системы в пространстве осуществляют, например, при помощи редукторов, регулировкой режима работы электродвигателя и др.
Бесспорным преимуществом использования аппаратов, основанных на использовании систем постоянных магнитов является значительное снижение эксплуатационных расходов, связанное с отсутствием необходимости в электропитании обмоток магнитного индуктора для возбуждения МП в его рабочем объеме.
Предлагаемый в изобретении магнитотерапевтический аппарат с механическим перемещением системы постоянных магнитов, создающей переменное МП в рабочем объеме аппарата, позволяет впервые в практике конструирования физиотерапевтической аппаратуры формировать МП с новыми, не применявшимися до настоящего времени характеристиками - винтовые МП и МП, пространственная структура которых совершает гармонические колебания возле заданного положения равновесия. В частности, это позволяет при помощи аппарата по изобретению совмещать в одном и том же лечебном сеансе преимущества существующих электронных магнитотерапевтических устройств, создающих только бегущее и только вращающееся МП.
Существенными признаками изобретения являются также предлагаемые конкретные варианты конструкции аппарата, общими для которых является наличие системы постоянных магнитов, и привода для осуществления движения системы.
В одном варианте СПМ расположена на плоскости, связанной с приводом таким образом, что плоскость перпендикулярна валу и, следовательно, в этой плоскости происходит вращение СПМ. Для большей простоты можно рассмотреть частные случаи подобной системы - одиночный постоянный магнит или два магнита.
В другом варианте система постоянных магнитов размещена в виде мозаики на поверхности жесткого цилиндра из диэлектрика. Для формирования однородного вращающегося МП поверхность цилиндра делят (по углу) на 4 полосы, параллельные оси цилиндра. На двух противоположных полосах (прямые дорожки) размещают постоянные магниты; две другие полосы оставляют свободными. При этом МП внутри цилиндра однородно, а вне его неоднородно. Для формирования винтового, т.е. одновременно и вращающегося и бегущего вдоль оси МП, систему постоянных магнитов образуют, размещая магниты на поверхности цилиндра по плавно изогнутым дорожкам.
Еще в одном варианте конструкции аппарата СПМ размещена на поверхности бесконечной гибкой ленты, натягиваемой по крайней мере двумя цилиндрами и приводимой в движение по крайней мере одним из них. При помощи подобной системы создают бегущее МП в рабочем объеме, каковым является пространство рядом с бесконечной лентой. Для повышения однородности МП две одинаковые бесконечные ленты с системами постоянных магнитов располагают так, чтобы бесконечные ленты были параллельны друг другу, а расстояние между ними достаточно для размещения тела пациента или одной из его конечностей.
На фиг.1 приведена блок-схема магнитотерапевтического аппарата по настоящему изобретению; фиг.2 иллюстрирует устройство аппарата с пространственно-неоднородным вращающимся МП; на фиг. 3 - магниты прямоугольного (А) и треугольного (Б) сечения; фиг.4 иллюстрирует устройство аппарата, в котором создается однородное вращающееся МП в цилиндрическом рабочем объеме; фиг.5 иллюстрирует возможные варианты использования аппарата; вариант размещения системы постоянных магнитов на поверхности цилиндра по спирали (плавно изогнутая дорожка) показан в виде развертки цилиндра на фиг.6; на фиг.7 - варианты аппарата, создающего бегущее МП, 7А - вариант с одиночной бесконечной лентой, 7Б - вариант с двумя лентами.
При помощи программируемого управляющего устройства 1 на фиг.1 задают параметры режима магнитного поля, которыми являются частота, скорость и направление перемещения вектора магнитной индукции в рабочем объеме, ее величина, количество и последовательность включения различных режимов на протяжении лечебного сеанса, продолжительность действия МП в каждом режиме и др. В приводе аппарата в качестве движителя 2 используют электромотор, пружинный заводной механизм и др. Блоком 3 механического согласования движителя с системой постоянных магнитов является, например, ременной или редукторного типа передаточный механизм. Подвижная система постоянных магнитов 4 создает заданное переменное МП. Рабочий объем 5 аппарата очерчен штриховой линией. Его размеры определяют, исходя из заданного значения магнитной индукции, варьируя намагниченность и размеры магнитов.
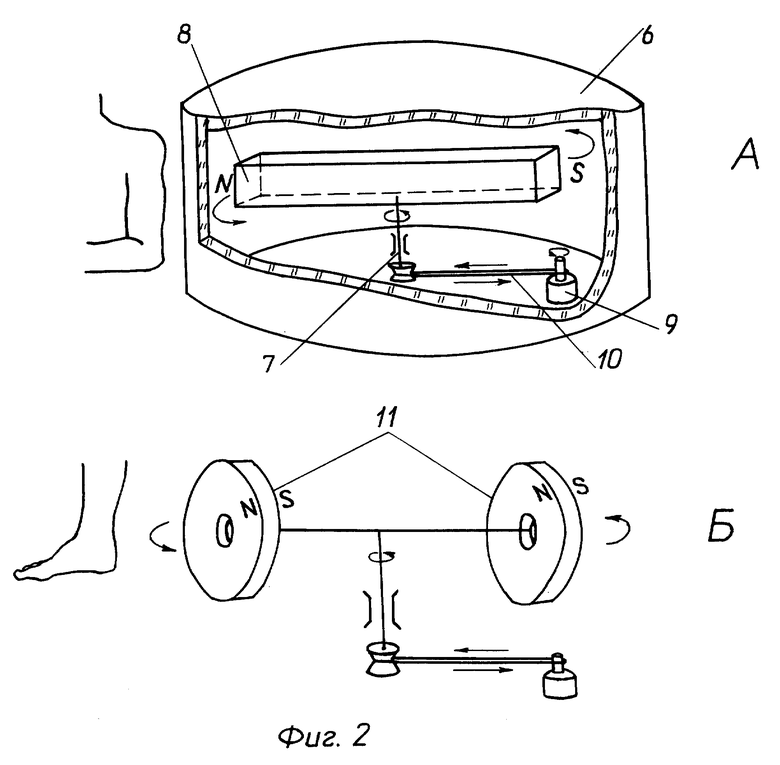
На фиг. 2А схематически изображен вариант аппарата с наиболее простым частным случаем СПМ - постоянным магнитом в виде бруска. В состав аппарата входит корпус 6 из немагнитного материала, предохраняющий от соприкосновения с движущимися частями аппарата. Внутри корпуса на оси 7 закреплен постоянный магнит 8, а также размещен электромотор 9, ось которого связана передаточным устройством (например, трансмиссией 10) с осью вращения магнита. Трансмиссия может быть снабжена устройством, позволяющим изменять передаточное число, т. е. частоту вращения. (Возможным путем изменения последней может служить и регулировка тока в обмотках электромотора). Вместо постоянного магнита в виде бруска можно использовать два или более постоянных магнитов, например, в виде шайб 11, закрепленных на стержне из немагнитного материала (фиг. 2Б). Увеличивая число магнитов и придавая им различную форму и намагниченность, можно создавать из них СПМ в виде мозаики таким образом, что по крайней мере один постоянный магнит закреплен на оси, перпендикулярной плоскости вращения магнита.
Рабочий объем аппарата, схематически изображенного на фиг.2, имеет тороидальную форму. Внутренний диаметр тороида равен диаметру аппарата, а наружный диаметр и поперечные размеры определяются минимально допустимым значением магнитной индукции.
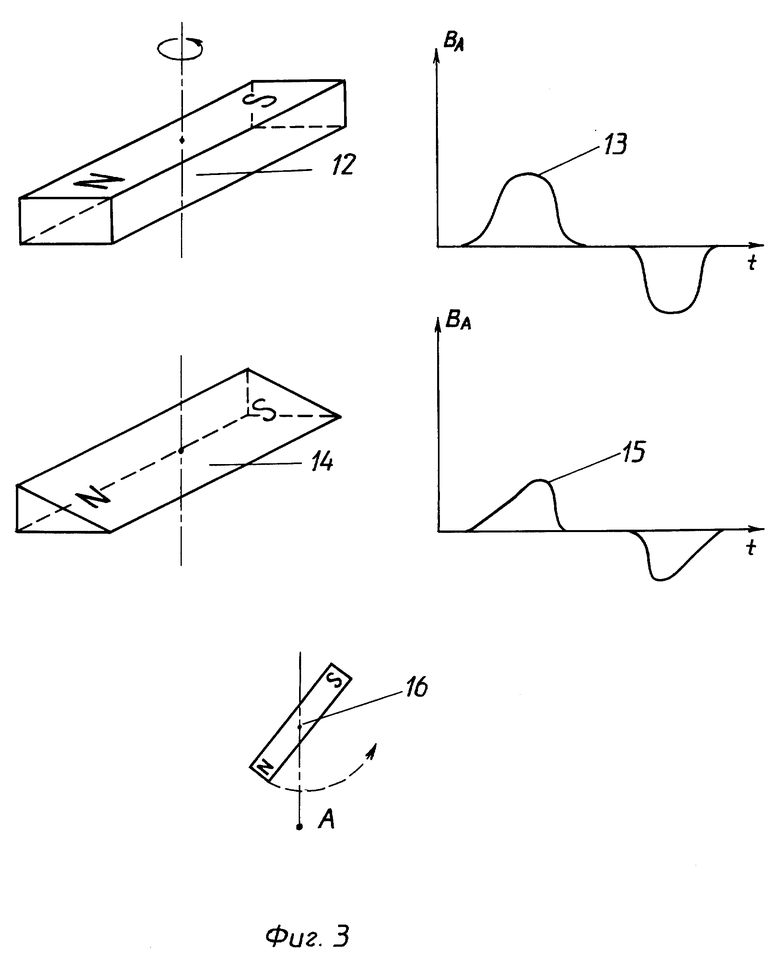
Фиг. 3 иллюстрирует возможность выбора того или иного временного закона изменения МП путем придания постоянному магниту соответствующей формы. Магниту прямоугольного сечения 12 соответствует зависимость 13 магнитной индукции ВА в точке А от времени; магниту треугольного сечения 14 -зависимость 15. В нижней части фиг.3 показан в плане магнит, вращающийся вокруг оси 16.
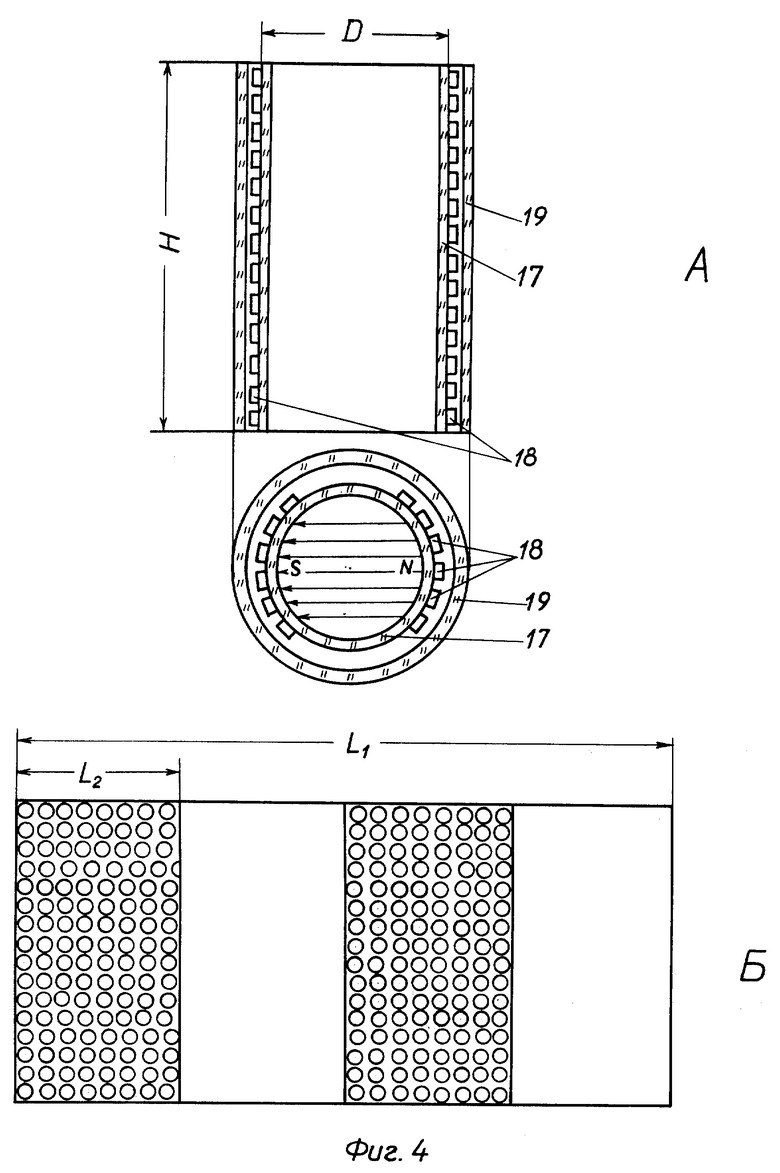
Фиг. 4А представляет собой две проекции (разрезы), а фиг.4Б - развертку цилиндра 17, на поверхности которого размещена система магнитов 18, состоящая из двух дорожек в виде мозаики. Две дуги, занятые дорожками с магнитами, составляют 80-100 градусов каждая. Между этими дугами имеются две другие дуги, не занятые магнитами. Длина каждой дуги L ≈ πD/4 и соответственно длина развертки L = πD. Как видно из фиг.4А, магниты на (позиция Б) одной из дуг обращены к центру цилиндра северными полюсами, а на второй - южными. Диаметр D и длину H цилиндра выбирают исходя из размеров необходимого рабочего объема (подвергается воздействию та или иная часть тела, все тело пациента). В состав аппарата входит защитный корпус 19 из немагнитного материала.
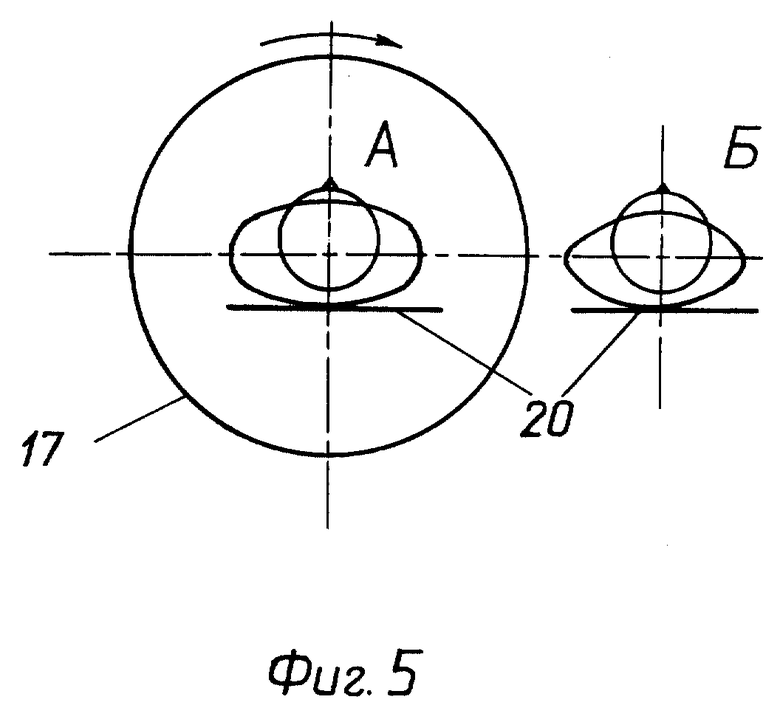
Отметим, что в случае рассматриваемого варианта аппарата возможно проведение магнитотерапевтических процедур в однородном вращающемся МП при размещении ложа с пациентом 20 внутри цилиндра (позиция А на фиг.5) и в градиентном (пространственно-неоднородном) вращающемся МП вне цилиндра.
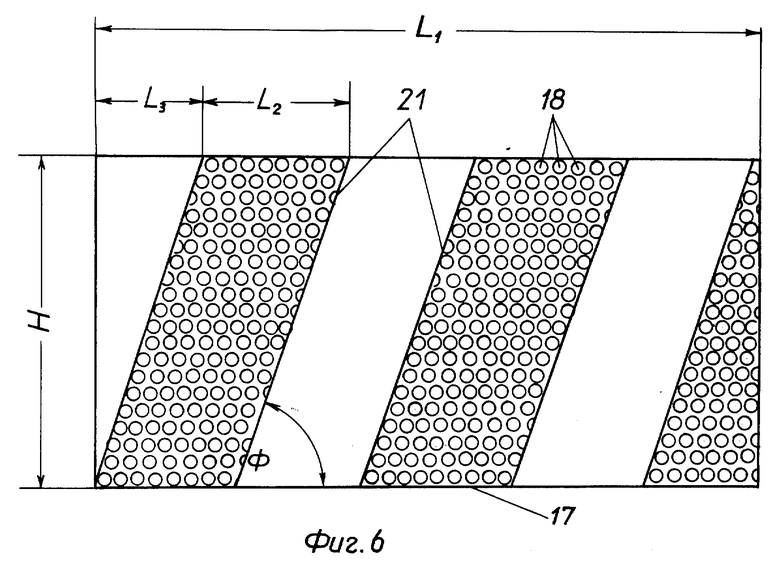
На фиг.6 - развертка цилиндра 17, иллюстрирующая вариант размещения системы постоянных магнитов 18 по спиральной дорожке 21. Угол φ между краем дорожки 21 с магнитами 18 и основанием цилиндра 17 выбирают в интервале значений 0 ≤ φ ≤ π/2. Как и на фиг. 4Б, L ≈ πD/2. Интервал между дорожками L= H/tg φ при φ = π/2 L=0, и фиг.6 переходит в фиг.4Б. При механическом вращении цилиндра вокруг его оси этот вариант формирует винтовое МП, имеющее одновременно компоненты бегущего вдоль оси и вращающегося в плоскости, перпендикулярной оси, магнитного поля.
В общем случае МП, соответствующее развертке цилиндрического варианта магнитотерапевтического аппарата с углом φ = 0, может использоваться в качестве периодически повторяющегося n раз (n=0,1,2...) элемента конструкции в продольном или поперечном направлении на вращающихся (барабан) или движущихся поступательно (бесконечная лента) поверхностях.
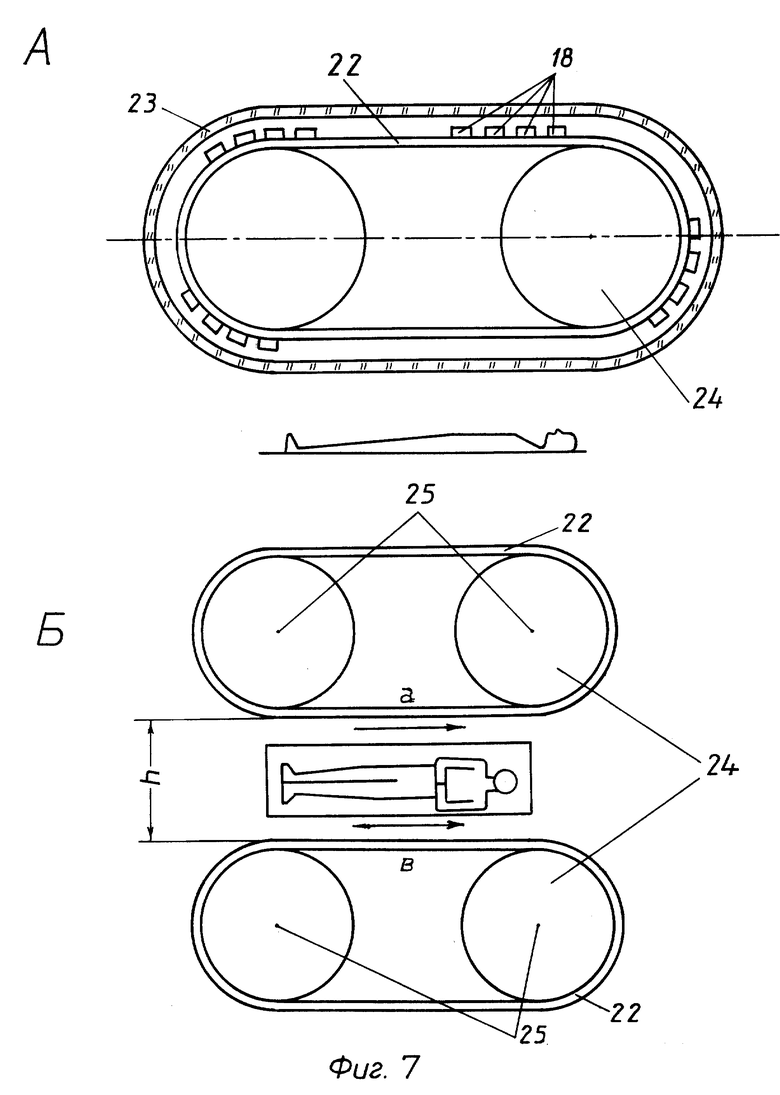
На фиг. 7 - схематическое изображение аппаратов, в которых система постоянных магнитов 18 закреплена на бесконечной гибкой ленте 22 из немагнитного материала и образует дорожки, перпендикулярные ленте. Величину интервала между магнитными дорожками выбирают в зависимости от заданных характеристик МП в рабочем объеме. В варианте А одиночная лента 22 фиксируется в пространстве и двигается при помощи цилиндров 24. Вся конструкция заключена в неметаллический защитный корпус 23. В варианте Б две ленты 22 с закрепленными на них магнитами охватывают цилиндры, оси 25 которых параллельны и размещены так, что ленты 22 также параллельны. Расстояние h между сторонами лент, обращенными друг к другу, делают достаточным для размещения ложа с пациентом. Возможны конструкции аппарата, в которых оси цилиндров горизонтальны, а возможны и варианты конструкции с вертикальными осями. При совпадении амплитуд и направлений векторов скорости Va и Vb участков a и b бесконечной ленты, наиболее близких к пациенту, в рабочем объеме аппарата возникает бегущее со скоростью V=Va=Vb магнитное поле, в случае противоположной ориентации векторов Va и Vb - вращающееся МП. В общем случае отличающихся величин модулей Va и Vb в рабочем объеме формируется суперпозиция бегущего и вращающегося полей.
В аппаратах рассматриваемого типа, а также в варианте аппарата с цилиндром (фиг.4), в качестве постоянных магнитов могут быть использованы элементы из магнитоэласта.
Аппарат по изобретению работает следующим образом.
В блок программируемого управляющего устройства наряду с данными о пациенте вводятся параметры МП (частота или скорость, а также направление перемещения вектора магнитной индукции в рабочем объеме, продолжительность действия МП в заданном режиме, при многочастотном, комплексном терапевтическом воздействии задаются параметры каждого режима, количество и последовательность их включения в течение сеанса). В случае локального характера воздействия МП - соответствующий сектор тела, а в случае общего воздействия - все тело пациента размещают в рабочем объеме аппарата с известными пространственно-временными характеристиками. Пациента располагают в удобном, ненапряженном положении в кресле или на ложе после предварительного процесса релаксации и измерения контрольных параметров, характеризующих психофизиологическое состояние пациента до магнитотерапевтической процедуры.
Аппарат приводят в состояние готовности: в зависимости от типа привода включают электропитание мотора, заводят механическую пружину, открывают предохранительный вентиль пневматической системы. Кнопкой ПУСК систему магнитов аппарата приводят в движение, и начинается отсчет времени процедуры таймерным устройством блока управления. После завершения лечебного сеанса по команде, поступающей с таймерного устройства, движитель аппарата автоматически выключается. Момент начала и момент завершения лечебного сеанса сопровождаются световым и звуковым сигналами. Затем производят повторный замер параметров функционального состояния пациента, значения которых совместно с параметрами магнитного поля заносят в память блока управления.
Аппарат снабжен кнопкой ручного прерывания сеанса в любой момент времени. После завершения процедуры подвижную часть системы магнитов блокируют от воздействия движителя. Аппарат находится в состоянии готовности к следующему лечебному сеансу с очередным пациентом.
Изобретение относится к области медицины и медицинской техники, в частности к физиотерапевтической аппаратуре для лечения различных заболеваний, например опорно-двигательного аппарата, онкологических, травм, для ускорения регресса воспалительных процессов. Техническим результатом является упрощение конструкции, снижение стоимости изготовления и эксплуатационных расходов, повышение надежности в работе аппарата. Магнитотерапевтический аппарат содержит установленную в диэлектрическом корпусе систему постоянных магнитов, выполненную в виде мозаики и связанную с приводом, содержащим программируемое управляющее устройство, при этом взаимное расположение постоянных магнитов в системе, их форма, размеры и намагниченность, а также взаимное расположение диэлектрического корпуса и устройства для размещения определяются конфигурацией магнитного поля в рабочем объеме. Возможны различные варианты выполнения системы постоянных магнитов. По крайней мере один постоянный магнит системы закреплен на оси, перпендикулярной плоскости вращения магнита. Система постоянных магнитов закреплена на поверхности цилиндра из немагнитного материала в виде прямых или плавно изогнутых дорожек. Для получения вращающегося пространственно-однородного МП в рабочем объеме внутри цилиндра делают две параллельные оси цилиндра дорожки напротив друг друга. Ширина дорожек, как и расстояние между ними, равна длине дуги, соответствующей углу π/2. При вращении цилиндра внутри него возникает вращающееся однородное, а вне его вращающееся неоднородное МП. И то и другое МП может быть использовано в лечебных целях. В случае придания дорожкам на поверхности цилиндра формы спирали аппарат формирует винтовое МП, имеющее одновременно компоненты бегущего вдоль оси и вращающегося в плоскости, перпендикулярной оси. Система постоянных магнитов может быть закреплена на поверхности гибкой ленты из немагнитного материала. Дорожки системы постоянных магнитов размещают перпендикулярно ленте с интервалом между дорожками, величину которого выбирают в зависимости от заданных характеристик МП. Лента натягивается на по крайней мере два параллельно установленных цилиндра. При вращении хотя бы одного из цилиндров лента приходит в движение и вблизи нее формируется бегущее МП. Для получения пространственно-однородного МП две конструкции с гибкими лентами размещают параллельно друг другу на некотором расстоянии, достаточном для размещения ложа с пациентом. При этом направления векторов магнитной индукции вблизи обеих лент должны совпадать. Возможны конструкции аппарата, в которых оси цилиндров как горизонтальны, так и вертикальны. 4 з. п.ф-лы, 7 ил.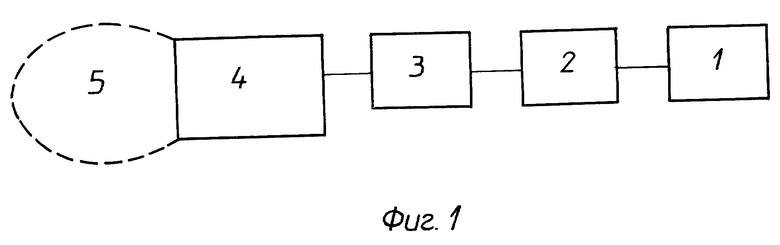
| УСТРОЙСТВО ДЛЯ МАГНИТОТЕРАПИИ | 1994 |
|
RU2045967C1 |
| DE 3337267 A, 09.06.85 | |||
| СПОСОБ ЭКСПРЕСС-ДИАГНОСТИКИ РЕЗИСТЕНТНОСТИ И ЧУВСТВИТЕЛЬНОСТИ К АЦЕТИЛСАЛИЦИЛОВОЙ КИСЛОТЕ | 2015 |
|
RU2578428C1 |
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| МАГНИТНЫЙ СТИМУЛЯТОР ДЛЯ ЛЕЧЕНИЯ ДВИГАТЕЛЬНОГО ТРАКТА | 1994 |
|
RU2074684C1 |
| DE 4132078 A1, 22.04.93 | |||
| US 5562706 A, 08.10.96 | |||
| DE 3417773 A, 14.02.85. | |||

