Изобретение относится к волоконно-оптическим автоколебательным системам на основе микромеханического резонатора с частотным кодированием выходного сигнала и может быть использовано в системах измерения различных физических величин: линейных и угловых перемещений, силы, давления и др.
Широкое освещение в литературе в настоящее время получили волоконно-оптические датчики (ВОД) физических величин на основе использования оптического когерентного излучения и микрорезонатора (MP).
При взаимодействии излучения с MP модулируется интенсивность оптического излучения на собственной резонансной частоте MP на основе использования обратной интерферометрической связи.
Микрорезонатор, как правило, представляет собой микрокамертон, микробалку, микромембрану и др., изготовленные из монокристаллов кремния или пьезокварца методами анизотропного травления, плазмохимии.
При определенных внешних условиях, деформирующих микрорезонаторную структуру или нарушающих условия взаимодействия источника излучения и MP, происходит изменение частоты резонансных колебаний вследствие изменения амплитуды колебаний MP, которое при фотометрическом механизме возбуждения колебаний может достигать десятков нанометров.
Измерение столь малой амплитуды колебаний MP требует использования интерферометрического метода съема информации и высокой добротности MP. С точки зрения возможности практической реализации проблема измерения малых амплитуд решается с применением волоконно-оптических датчиков автогенераторного типа на основе применения интерферометра Фабри-Перо. При этом резонатор интерферометра образован отражающей поверхностью MP, совершающей поперечные акустические колебания, и полупрозрачным отражателем в виде полупрозрачного зеркала или торцевой грани световода, сопряженной вторым торцом с источником излучения ("Sensors and Actuators", A 21-A-23 1990, pp 369-372, Electronics Letters, 1988, vol. 24, N 13, pp 777-778).
Новые возможности для измерения малых угловых перемещений открывает метод измерения угловых перемещений одного объекта относительно другого, который основан на изменении резонансной частоты MP при изменении угловой ориентации MP относительно оптической оси источника излучения.
Анализ возможных решений остро стоящей в настоящее время проблемы измерения малых угловых перемещений в тяжелых условиях эксплуатации (например, в условиях агрессивных взрывоопасных сред, труднодоступных участках и др.) показывает, что разработка ВОД угловых перемещений на основе волоконно-оптических микрорезонаторных датчиков бесконтактного типа - один из наиболее перспективных путей решения данной задачи.
Наиболее близким к предлагаемому техническому решению по технической сущности и достигаемому результату является ВОД физических величин, опубликованный в Electronics Letters 31 st August, 1989, vol. 25, N 18, pp 1235... 1236.
Устройство содержит лазерный источник излучения на длине волны λ = 840 нм и мощностью P=1 мВт, делитель, полупрозрачное зеркало, кремниевый микрорезонатор в виде мостика, на поверхности которого размещено зеркало из серебра толщиною 40 нм, фотоприемник, анализатор спектра.
Устройство работает следующим образом.
Лазерное излучение через делитель, полупрозрачное зеркало направляется на MP и приводит его в возбужденное состояние на собственной резонансной частоте. Полупрозрачное зеркало с отражающей поверхностью MP образуют интерферометр Фабри-Перо. Информация о резонансной частоте MP фиксируется интерферометрически с помощью интерферометра Фабри-Перо. Отраженное от интерферометра излучение с помощью делителя направляется на фотоприемник, связанный с блоком обработки информации. Под действием внешних воздействий (температуры, давления, ускорения и др.) изменяется резонансная частота MP, которая с помощью интерферометра Фабри-Перо фиксируется в измерительном канале ВОД.
Стабилизация резонансной частоты MP осуществляется за счет электронной подстройки частоты лазера в небольшом диапазоне частот. Чтобы перекрыть заданный диапазон частот (~15 ГГц), длина волны лазерного источника излучения должна изменяться на 0,034 нм. Это достигается путем изменения тока накачки лазерного диода в незначительных пределах.
Выходной сигнал с фотоприемника делится на две части: одна часть направляется к анализатору спектра, другая проходит через проходной фильтр с низкими потерями и обеспечивает незначительное изменение тока накачки лазерного диода. При этом для обеспечения режима автоколебаний в течение длительного времени к напряжению тока накачки лазерного диода предъявляются жесткие требования стабильности, обеспечивающие устойчивое положение рабочей точки А на оптической характеристике YA резонатора Фабри-Перо, а также тщательный выбор напряжения смещения в соответствии с условиями, где имеют место автоколебания.
В результате известное решение характеризуется следующими отрицательными признаками:
- высокие требования к стабильности мощности источника излучения (тока накачки лазерного диода) и тщательный контроль рабочей точки интерферометра Фабри-Перо за счет изменения в небольших пределах оптической мощности излучения, падающей на MP,
- дополнительные потери мощности оптического излучения, обусловленные наличием необходимых дискретных элементов, образующих дополнительный канал обратной связи в электронной схеме,
- жесткие требования к стабильности характеристик резонатора Фабри-Перо, а также характеристик MP в силу ограниченной возможности их коррекции в рассматриваемой электронной схеме;
- ограниченные возможности подстройки рабочей точки интерферометра Фабри-Перо за счет изменения длины волны оптического излучения лазерного диода при реализации сложной электронной схемы обратной положительной связи.
Задача, решаемая данным изобретением, заключается в разработке микрорезонаторного ВОД угловых перемещений одного объекта относительно другого на базе унифицированных элементов, а именно волоконно-оптического лазера (ВОЛ), одномодовых световодов, автоколлиматора и микрорезонаторного чувствительного элемента.
Решение поставленной задачи обеспечивается тем, что в микрорезонаторном оптическом датчике угловых перемещений двух объектов, включающем источник оптического излучения, микрорезонатор, фотоприемник, блок обработки сигналов, в качестве источника оптического излучения использован волоконно-оптический лазер, оптически связанный с микрорезонатором через автоколлиматор, при этом на неподвижном объекте жестко установлены автоколлиматор, волоконно-оптический лазер, фотоприемник и блок обработки информации, а на подвижном объекте, совершающем угловые перемещения относительно первого объекта, жестко закреплен микрорезонатор.
Основой конструкции ВОД угловых перемещений является ВОЛ, автоколлиматор и блок чувствительного элемента (БЧЭ). Информационным сигналом ВОД является частота автоколебаний F, практически совпадающая с резонансной частотой MP fр.
Предлагаемый ВОД угловых перемещений основан на применении ВОЛ и модуляции добротности двухзеркального резонатора вследствие фотоиндуцированных угловых отклонений одного из зеркал ВОЛ, в качестве которого служит отражающая поверхность БЧЭ, выполненная в виде микромостика на мембране.
При этом один торец одномодового световода ВОЛ сопряжен с коллиматором, формирующим параллельный пучок света на отражающую поверхность микромостика БЧЭ, нормаль к которой составляет угол θи с осью падающего пучка, а второй торец является выходным.
Вследствие эффекта фотоиндуцированной деформации изменение мощности излучения при отражении от БЧЭ приводит к модуляции угла отклонения отраженного пучка θ(t), т.е. к модуляции мощности оптического излучения.
В качестве автоколлиматора используются две градиентные стержневые линзы (ГСЛ) в 1/8 периода каждая, формирующие Гауссовы пучки.
Кроме того, для установления в ВОЛ автоколебательного режима независимо от топологии и конструкции БЧЭ в исходном состоянии угол отклонения θ = θи находится в интервале θ1≤ θи≤ θ2, границы которого (θ1, θ2) зависят от характеристик MP и ВОЛ. При этом резонансная частота MP близка к частоте релаксационных колебаний ВОЛ fрел или ее гармоник, т.е. fрел ≈ n • fрел, где n = 1,2,3...n0. Отметим, что определяется относительной накачкой q = Pн/Pн.п., где Pн.п. - пороговый уровень накачки, а средняя мощность излучения  превышает определенный пороговый уровень
превышает определенный пороговый уровень  зависящий от характеристик MP и ВОЛ.
зависящий от характеристик MP и ВОЛ.
В результате оптическая связь между ВОЛ и MP осуществляется безинтерферометрическим способом через автоколлиматор. Благодаря высокой чувствительности коллиматорной системы к угловым перемещениям эффективная модуляция добротности рассматриваемого двухзеркального оптического резонатора ВОЛ происходит вследствие фотоиндуцированных угловых перемещений одного из зеркал, в качестве которого служит отражающая поверхность микромостика БЧЭ.
Предложенный режим возникновения резонансной автомодуляции в системе ВОЛ-MP с коллиматором выгодно отличается от режима известного технического решения с использованием интерферометра Фабри-Перо.
В известной системе изменение базы интерферометра Фабри-Перо H0 приводит к модуляции как амплитуды, так и фазы автоколебаний. При этом область существования автоколебаний не превышает половину периода интерферометра Фабри-Перо, т.е. Δδo< λ/4, что составляет ~400 нм. Ввиду незначительности Δδo случайные воздействия на интерферометр вызывают дрейф рабочей точки интерферометра или срыв автоколебаний. В предлагаемом устройстве при изменении Hо в пределах до 3 мм срыва автоколебаний не наблюдалось. При этом нестабильность частоты составляет Δ F/F ≤ 3 • 10-4.
Из вышеизложенного следует, что новые свойства системы ВОЛ-коллиматор-MP являются основанием рассматривать данную систему в качестве основы для разработки ВОД различных физических величин.
Суть предлагаемого технического решения заключается в разработке ВОД угловых перемещений, выходной сигнал которого - частота автоколебаний в системе ВОЛ - автоколлиматор - MP как функция угла θи между осью коллимированного пучка и нормалью к отражающей поверхности MP, жестко связанного с подвижным объектом.
При этом диапазон возможных углов θи является ограниченным и по порядку величин определяется углом дифракционной расходимости пучка, составляющего примерно (1-3) • 10-3 рад.
Таким образом, предлагаемый датчик предназначен для измерения малых угловых отклонений. Необходимо отметить, что характер поведения функции преобразования F(θи) существенно зависит от параметров системы и по этой причине возможны как монотонные, так и немонотонные зависимости F(θи). Очевидно, что с точки зрения проектирования ВОД угловых перемещений целесообразно применение систем с монотонной зависимостью F(θи).
Предлагаемая схема ВОД угловых перемещений с монотонной зависимостью F(θи) представлена на фиг. 1, где: 1, 2 - объекты, угол рассогласования между которыми измеряется, 3 - коллиматор, жестко связанный с объектом 1, 4 - БЧЭ, жестко связанный с подвижным объектом 2, 5 - ВОЛ, излучение которого с помощью коллиматора 3 направляется в виде параллельного пучка света в сторону БЧЭ 4, 6 - источник блока накачки ВОЛ 5, 7 - выходное полупрозрачное зеркало М1 резонатора ВОЛ 5 с коэффициентом отражения R1, 8 - отражающее зеркало М2 резонатора ВОЛ 5 c коэффициентом отражения R2, связанное с MP БЧЭ 4, 9 - одномодовый световод, сопряженный с ВОЛ 5, 10 - фотоприемник, детектирующий выходное излучение ВОЛ 5, 11 - блок обработки сигналов, электрически связанный с фотоприемником 10, 12 - ось вращения объекта 2 относительно объекта 1.
Заметим, что в данном случае тип применяемой микрорезонаторной структуры в БЧЭ 4 не играет существенной роли, однако, исходя из соображений обеспечения максимальной добротности микрорезонатора и однотипности БЧЭ для различных ВОД, целесообразно применение микрорезонаторной структуры типа "мостик" на мембране, а в качестве автоколлиматора - градиентных стержневых линз в четверть периода, формирующих Гауссовы пучки.
Устройство работает следующим образом.
На поверхности подвижного объекта 2 закрепляется БЧЭ 4, который в исходном положении ориентируется относительно оптической оси автоколлиматора 3, расположенного на неподвижном объекте 1 таким образом, что выполняется условие θ1< θи< θ2, где θ1,θ2 - границы интервала угла отклонения θи, в котором устанавливается устойчивый режим автоколебаний. При этом частота автоколебаний Fo(θи) практически совпадает с резонансной частотой fр MP, а существование автоколебательного режима в системе ВОЛ - коллиматор - MP осуществляется за счет модуляции амплитуды коэффициента отражения R2 вследствие фотоиндуцированных угловых отклонений MP. Нормаль к отражающей поверхности MP первоначально ориентирована относительно оптической оси автоколлиматора 3 под заданным углом θи. Промодулированное излучение на резонансной частоте попадает на фотоприемник 10, электрический сигнал с которого поступает на блок обработки информации 11.
При угловом перемещении объекта 2 относительно объекта 1 угол между осью коллимированного пучка и нормалью к поверхности микрорезонатора θи изменяется на некоторую величину Δθи, что приводит к изменению частоты автоколебаний F(θи+Δθи), фиксируемой блоком обработки информации 11.
Задача заключается в измерении малых угловых перемещений подвижного объекта 2 относительно неподвижного объекта 1. Заметим, что в силу свойств рассматриваемой автоколебательной системы данная конструкция ВОД угловых перемещений нечувствительна к плоскопараллельным перемещениям объекта 2, изменяющим расстояние l между обоими объектами в пределах до 3 мм.
Экспериментально измеренные значения параметров ВОД угловых перемещений рассматриваемого типа следующие:
- диапазон измерений (0... 1,5) • 10-3 рад.,
- коэффициент преобразования 80 кГц/рад,
- порог чувствительности 5 • 10-5 рад.
Примечательно, что при изменении параметра l до 3 мм, т.е. при взаимных линейных смещениях автоколлиматора 3 и БЧЭ 4 срыва автоколебаний не наблюдалось, а нестабильность частоты не превышала Δ F/F ≤ 3 • 10-4.
В известных измерительных системах изменение базы интерферометра Фабри-Перо при автоколебаниях приводит к модуляции как амплитуды, так и фазы. При этом область существования автоколебаний не превышает половины периода интерферометра Фабри-Перо, т.е. λ/4, что составляет ~400 нм. Возникает хорошо известная в интерферометрии проблема, связанная со стабилизацией рабочей точки интерферометра.
Предлагаемый безинтерферометрический способ генерации автоколебаний свободен от этих недостатков, что позволяет улучшить основные характеристики ВОД угловых перемещений: точность и чувствительность.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОРЕЗОНАТОРНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1998 |
|
RU2142116C1 |
| МУЛЬТИПЛЕКСНАЯ СИСТЕМА АВТОГЕНЕРАТОРНЫХ МИКРОРЕЗОНАТОРНЫХ ВОЛОКОННО-ОПТИЧЕСКИХ ДАТЧИКОВ ФИЗИЧЕСКИХ ВЕЛИЧИН | 1998 |
|
RU2142615C1 |
| МИКРОРЕЗОНАТОРНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ФИЗИЧЕСКИХ ВЕЛИЧИН | 1997 |
|
RU2135957C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ АВТОГЕНЕРАТОР | 1997 |
|
RU2135958C1 |
| МИКРОРЕЗОНАТОРНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ЭЛЕКТРИЧЕСКОГО ТОКА | 1999 |
|
RU2170439C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ АВТОГЕНЕРАТОР | 1998 |
|
RU2169904C2 |
| МИКРОРЕЗОНАТОРНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК МАГНИТНЫХ ПОЛЕЙ | 1999 |
|
RU2157512C1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ ФИЗИЧЕСКИХ ВЕЛИЧИН | 1998 |
|
RU2142115C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ТЕМПЕРАТУРЫ НА ОСНОВЕ МИКРОРЕЗОНАТОРА | 1998 |
|
RU2161783C2 |
| МИКРОРЕЗОНАТОРНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК КОНЦЕНТРАЦИИ ГАЗОВ | 1998 |
|
RU2142114C1 |
Датчик включает блок чувствительного элемента (БЧЭ), жестко установленный на неподвижном объекте, и микрорезонатор, расположенный на подвижном объекте. БЧЭ содержит волоконно-оптический лазер, автоколлиматор, фотоприемник и блок обработки информации. Частота автоколебаний лазера практически совпадает с резонансной частотой микрорезонатора. Существование автоколебательного режима в системе волоконно-оптический лазер - коллиматор - микрорезонатор осуществляется за счет модуляции амплитуды коэффициента отражения вследствие фотоиндуцированных угловых отклонений микрорезонатора. При угловом перемещении объекта относительно объекта угол между осью коллимированного пучка и нормалью к поверхности микрорезонатора изменяется на некоторую величину, что приводит к изменению частоты автоколебаний, фиксируемой блоком обработки информации. Обеспечено повышение точности и чувствительности. 1 ил.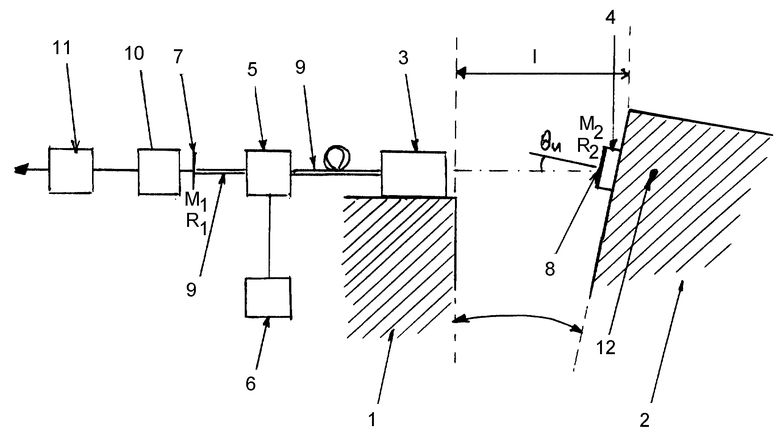
Микрорезонаторный оптический датчик, включающий лазерный источник оптического излучения, микрорезонатор, фотоприемник и блок обработки сигналов, отличающийся тем, что в качестве источника оптического излучения использован волоконно-оптический лазер, оптически связанный с микрорезонатором через автоколлиматор, при этом на неподвижном объекте жестко установлены автоколлиматор, волоконно-оптический лазер, фотоприемник и блок обработки информации, а на подвижном объекте, совершающем угловые перемещения относительно первого объекта, жестко закреплен микрорезонатор.
| Electronic letters, 1989, v.25, N 18, p.1235, 1236 | |||
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2057285C1 |
| US 5448657 A, 05.09.95. | |||
