Настоящее изобретение относится к регулируемым приводам, которые по существу состоят из гидравлического насоса и гидравлического двигателя.
В известных гидравлических приводах с переменной скоростью как гидравлический насос, так и гидравлический двигатель являются крыльчатыми насосами известного типа, каждый включает ротор или барабан, снабженный некоторым количеством лопастей прямоугольной формы, закрепленных в канавках, проходящих аксиально в упомянутом роторе, контактирующих своими краями с цилиндрической поверхностью, которая является внутренней поверхностью цилиндра насоса, и боковыми сторонами с фланцами, один или оба которых имеют центральное отверстие, через которое выходит наружу объединенный с ними вал их ротора. Оси ротора и цилиндра остаются параллельными друг другу, расстояние между ними может изменяться особым механизмом, так что объем, определяемый ячейками или камерами, образованными каждой парой соседних лопастей, двумя цилиндрическими секциями, ограничивающими эти лопасти в роторе и цилиндре, и их боковыми фланцами, изменяется при повороте ротора. Это изменение находится в диапазоне от нуля, когда оси ротора и цилиндра перекрываются, до максимума, когда ротор расположен тангенциально к внутренней поверхности цилиндра. Если эти камеры целиком заполнены жидкостью, эксцентриситет между осями ротора и цилиндра приводит к потоку жидкости в одном направлении, когда эксцентриситет оси ротора относительно оси его цилиндра меняется между нулем и максимальной величиной, и в противоположном направлении. Очевидно, для этой цели все камеры гидравлического насоса для одного направления движения их ротора с тенденцией уменьшить их объем должны сообщаться со всеми камерами гидравлического двигателя, которые при том же направлении движения ротора имеют тенденцию увеличить их объем, тем самым разрешается течение жидкости между гидравлическим насосом и гидравлическим двигателем в одном направлении, а все камеры гидравлического двигателя, которые пытаются уменьшить объем, должны сообщаться со всеми камерами гидравлического насоса, которые для того же направления вращения увеличивают свой объем, обеспечивая тем самым поток жидкости в противоположном направлении и замыкая тем самым контур потока. Таким образом, если на вал гидравлического насоса подается вращение с некоторой скоростью, то на валу гидравлического двигателя появляется другое вращение, такое же или отличное от первого, это последнее является функцией, кроме остальных, параметров эксцентриситета роторов относительно их цилиндров; таким образом работают известные приводы скорости, состоящие из крыльчатых насосов.
Такие известные приводы с переменной скоростью имеют ряд недостатков, которые не позволяют использовать их универсально: на первом месте стоит нерешенная достаточно удовлетворительно проблема герметизации сборки, поскольку в известных устройствах изменение скорости достигается посредством линейных валов с несколькими осями относительно других, и это делает проблему уплотнения очень сложной. Как следствие проблемы герметизации, рабочие давления привода с переменной скоростью малы, и, следовательно, ограничена передаваемая мощность. Другими недостатками этих известных приводов с переменной скоростью являются их большие размеры и вес, что делает невозможным их использование в ряде областей, например в автомобилестроении и многих других областях, где занимаемое пространство является важным или даже жизненным требованием. По очевидным причинам стоимость таких приводов очень высока.
На основе вышеописанного привода с переменной скоростью далее поясняются отличия, которые характеризуют настоящее изобретение как в конструкции, так и в работе, существенно улучшающие его многогранность.
Гидравлический привод с переменной скоростью как объект настоящего изобретения имеет задачей достичь большей компактности по сравнению с известными приводами и большей простоты как в отношении его деталей, так в решении уплотнения жидкости, которая будет работать внутри привода при высоких давлениях между гидравлическим насосом и гидравлическим двигателем, указанные характеристики несомненно приведут к важным преимуществам по сравнению с известными гидравлическими приводами с переменной скоростью, доступными сейчас на мировом рынке.
Для получения технического результата был разработан интегральный блок, называемый сборкой привода с переменной скоростью, включающий цилиндр гидравлического насоса, цилиндр гидравлического двигателя, их концевые крышки и центральную пропускную вставку между ними, в которой предусмотрены проходы или каналы для перепуска жидкости от гидравлического насоса к гидравлическому двигателю при высоком давлении и от гидравлического двигателя к гидравлическому насосу при низком давлении, замыкая контур. Валы ротора гидравлического насоса и ротора гидравлического двигателя имеют общую геометрическую ось неподвижной снаружи, вокруг которой они могут поворачиваться независимо друг от друга, и это вращательное движение является единственно возможным движением.
Привод в сборе будет способен только поворачиваться вокруг геометрической оси, неподвижной снаружи и отличной от геометрической оси цилиндра гидравлического насоса и от геометрической оси цилиндра гидравлического двигателя, а также отличной от общей геометрической оси роторов. Вращение привода в сборе, который приводится снаружи либо вручную, либо с помощью специального механизма, приводит к тому, что цилиндр гидравлического насоса и цилиндр гидравлического двигателя смещают свои геометрические оси по направлению или вдоль от таковых своих соответствующих роторов; этот аффект будет менять соотношение между скоростями вращения ротора гидравлического насоса и ротора гидравлического двигателя.
Для пояснения главных концепций, которые отличают и существенно модифицируют этот тип механизмов, к настоящему описанию приложен ряд чертежей, показывающих главные существенные черты настоящего изобретения путем не ограничивающих его примеров с целью описания и объяснения его работы.
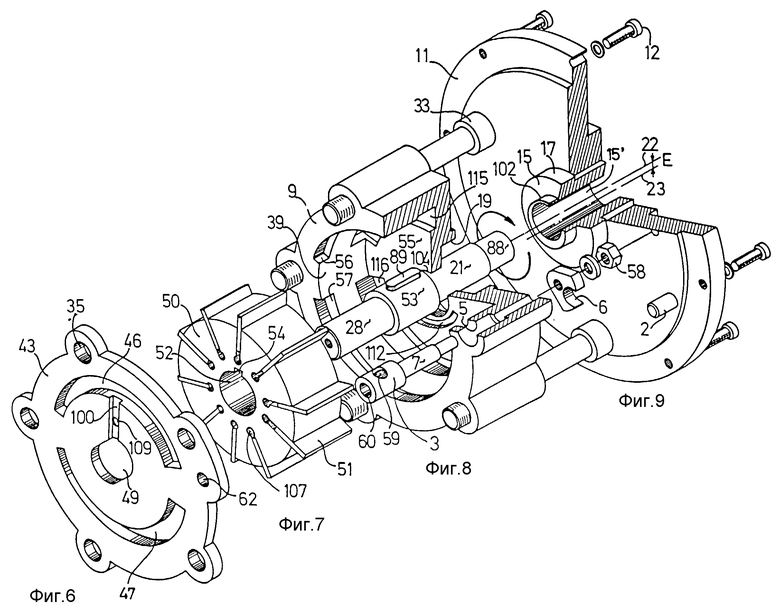
Фиг. 1-9 показывают вскрытый и диаграммный трехмерный вид частотного устройства с переменной скоростью, которое, будучи представительным примером новшеств в механизмах этого типа, использовано в качестве примера для объяснений.
На фиг. 1 показана сборка корпуса, состоящая из корпуса 10 и крышки 11 на фиг. 9, которая присоединяется к корпусу посредством болтов 12, закрученных в 13. Эта неподвижная снаружи сборка снабжена двумя отверстиями на противоположных сторонах, в которые входят два соответствующих двухэксцентриковых подшипника, а именно элемент 14 на фиг.1 и 15 на фиг.9. Независимо от их присоединения их вращение предотвращается чекой 16 на фиг. 1 и соответствующей деталью на фиг. 9 (не видна). Оба подшипника одинаковы и расположены на одной линии друг с другом. Оба подшипника, чьи внешние цилиндрические части 17 и 102 на фиг. 1 и 9 размещены во внутренней части сборки корпуса, находятся в тесном контакте с поверхностями 18 и 103 фиг. 3 и также находятся в тесном контакте с поверхностями 19 и 104 фиг. 8; следовательно и поскольку последние поверхности являются частью сборки привода и эта сборка является интегрированной, единственным ее допустимым движением является вращение вокруг геометрической оси 23 цилиндрических поверхностей 17, 18, 19, 102, 103 и 104. Двухэксцентриковые подшипники снабжены также внутренними цилиндрическими отверстиями 14' на фиг. 1 и 15' на фиг. 9, соосными друг с другом по общей геометрической оси 22, параллельной и отделенной на расстояние E по отношению к геометрической оси 23. Это всегда постоянное расстояние E будет далее именоваться параметром эксцентриситета. Эти внутренние цилиндрические поверхности находятся в тесном контакте с валами роторов гидравлического насоса и гидравлического двигателя соответственно. Часть 20 фиг. 2, относящаяся к валу ротора гидравлического насоса, плотно входит во внутреннее цилиндрическое отверстие 18 фиг.1, часть 24 той же фигуры остается снаружи корпуса для связи с приводным устройством так, что она свободно поворачивается вокруг геометрической оси 22. Часть 21 фиг.8, относящаяся к валу ротора гидравлического двигателя, плотно входит во внутреннее цилиндрическое отверстие 19 фиг. 9, часть 88 фиг.8 остается снаружи корпуса для связи с трансмиссией и также может свободно поворачиваться вокруг той же геометрической оси 22. Очень важно отметить, что оба вала концентричны и могут вращаться независимо друг от друга. Это потому, что вал гидравлического двигателя расположен внутри вала ротора гидравлического двигателя и своей цилиндрической поверхностью 28 фиг.8 входит в вырез 26 фиг.2, который является внутренним разрезом части 25 вала ротора гидравлического насоса. Ротор гидравлического насоса, представленный деталью 40 фиг.4, образует единое тело со своим валом за счет того факта, что последний плотно входит в отверстие 82 фиг.4, более точно в шпоночную канавку 42 той же фигуры, посредством чеки 27 фиг. 2. Следует отметить, что в этом частном случае ротор снабжен 12 лопастями, а именно деталями 41 фиг. 4, другие приводы с переменной скоростью этого типа могут иметь различное количество лопастей. Аналогично, ротор гидравлического двигателя, представленный деталью 50 фиг. 7, образует целое со своим валом 53 за счет того, что последний плотно входит в отверстие 52 фиг. 7 посредством введения чеки 89 фиг. 8 в шпоночную канавку 54. В этом частном случае ротор гидравлического двигателя снабжен 10 лопастями, а именно деталями 51 на фиг.7; другие приводы с переменной скоростью этого типа могут иметь различное количество лопастей. Таким образом, можно видеть, что ротор гидравлического насоса, ротор гидравлического двигателя и их соответствующие валы все имеют ось 22 в качестве общей геометрической оси, которая остается неподвижной по отношению к внешним элементам, параллельна геометрической оси 23, которая также неподвижна по отношению к внешним элементам и расположена от нее на расстоянии E.
Оба ротора расположены внутри сборки привода, который образован из некоторого количества целых частей, которые, как отмечено, выше, не имеют иных возможностей движения, кроме вращения вокруг геометрической оси 23. Далее описаны элементы, образующие сборку привода с переменной скоростью.
Элемент 8 фиг. 3 является корпусом цилиндра гидравлического насоса и частью сборки привода. Сам цилиндр 29 фиг. 3, боковая крышка на той же фигуре и пропуская вставка 38 фиг. 5 заключают в себе ротор 40 насоса, фиг. 4. Стержень 31 фиг. 3, который выходит из корпуса через щель 32 фиг. 1, также является частью сборки привода; его работа вызовет поворот всей сборки привода вокруг его геометрической оси 23. Эта часть сборки привода соединена с пропускной вставкой, которая показана на фигурах 5 и 6 и будет описана ниже, и также с корпусом цилиндра гидравлического двигателя и его крышкой, показанными на фиг. 8. Это соединение осуществляется посредством болтов 33 фиг. 8, которые объединяют всю сборку привода, проходя сквозь сверления 35 и 34 фиг. 6 и 5 и будучи завернутыми в сверления 64 фиг. 3. Вырезы 36 и 37 цилиндра гидравлического насоса можно видеть на фиг. 3, соответственно во входных отверстиях 44 и 45 накопителя на фиг. 5, их функция заключается в придании однородности набору камер, образованных лопастями ротора гидравлического насоса, они на одном конце соединены с выходом жидкости и в то же время придают однородность набору камер, также образованных лопастями ротора гидравлического насоса и соединенных с другого конца с возвратным потоком жидкости; далее они насколько возможно облегчают поток жидкости между гидравлическим насосом и гидравлическим двигателем. В крышке 30 цилиндра гидравлического насоса имеются два глухих прохода 113 и 114, соответствующих проходам 44 и 45, для обеспечения большей однородности камер высокого и низкого давления.
Элемент 9 на фиг. 8 представляет корпус цилиндра гидравлического двигателя, который также является частью сборки привода. Заметим, что цилиндр 39 фиг. 8, его боковая крышка 55 на той же фигуре и пропускная вставка 43 фиг . 6 включают ротор 50 фиг. 7. Вырезы 56 и 57 цилиндра гидравлического двигателя можно видеть также на фиг. 8, соответственно во входных отверстиях накопителя, их функция состоит в придании однородности набору камер, образованных лопастями ротора гидравлического двигателя, соединенных на одном конце с входом жидкости, и в то же время в придании однородности набору камер, образованных лопастями ротора гидравлического двигателя, соединенных на другом конце с возвратным потоком жидкости; далее они насколько возможно облегчают поток жидкости между гидравлическим насосом и гидравлическим двигателем. В крышке 55 цилиндра гидравлического двигателя имеются два глухих порта 115 и 116, ответных портам 46 и 47, для обеспечения большей однородности камер высокого и низкого давления.
Можно видеть, что набор камер гидравлического насоса в контакте с выходным проходом 44 фиг. 5 и набор камер гидравлического двигателя в контакте с таким же проходом 46 фиг. 6 совместно с каналом, представленным собственно выходным портом, его геометрия и вырезы 36 фиг. 3 и 56 фиг. 8 образуют единичную камеру, так что поток жидкости от гидравлического насоса к гидравлическому двигателю является насколько возможно гладким, это обусловлено также тем, что оба ротора всегда вращаются в одном направлении, хотя и с разной скоростью, тем самым обеспечивая полное использование инерции жидкости.
В пропускной вставке 38 фиг. 5 показан также коллектор 105, арка которого расположена примерно от начала до конца прохода 45 низкого давления, точные положения ее концов определяются геометрией сверлений 106, образованных в основании лопастей гидравлического насоса. Коллектор 105 сообщается через отверстие 108 фиг. 5 с каналом 100 фиг. 6, который в свою очередь попадает в проходы высокого давления 44 и 46 с центральными отверстиями 48 и 49. Таким образом, коллектор 105 будет находиться при высоком давлении так же, как головные части лопастей гидравлического насоса, расположенные в этой области, поскольку сверления 106 будут находиться в постоянном контакте с коллектором 105, пока лопасти находятся в области высокого давления. Аналогично на невидимой стороне фиг. 6 будет другой коллектор, такой же, как коллектор 105, арка которого расположена примерно от начала до конца прохода 47 низкого давления, отверстия ее концов корректируются в зависимости от положения сверлений 107, образованных в основании лопастей гидравлического двигателя. Коллектор, в свою очередь, сообщается через отверстие 109 фиг. 6 с каналом 100, так что этот коллектор будет находиться под высоким давлением, так же, как и головные части лопастей гидравлического двигателя, расположенные в этой области.
Другой коллектор 111 на фиг. 3 расположен в боковой стенке 30 цилиндра гидравлического насоса, перекрывая угол, примерно равный углу прохода 45 низкого давления; его угол таков, что в сумме с апертурным углом коллектора 105 составляет примерно 360 угловых градусов и кратен 60. Этот угол корректируется в зависимости от геометрии сверлений 106. Этот коллектор 111 сообщается с камерой низкого давления посредством канала, невидимого на фигуре, который будет описан ниже. Вследствие этого головные части лопастей гидравлического насоса, расположенные в области низкого давления, также будут находиться под низким давлением, поскольку в этой области сверления 106 будут в постоянном контакте с коллектором 111. Аналогично коллектор 112 фиг. 8 расположен в боковой стенке 55 цилиндра гидравлического двигателя, перекрывая угол, примерно равный углу прохода 47 низкого давления; его угол таков, что в сумме с углом коллектора высокого давления гидравлического двигателя, описанного выше и невидимого на фиг. 6, составляет 360 угловых градусов и кратен 60. Этот угол корректируется в зависимости от геометрии сверлений 107. Этот коллектор 112 сообщается с камерой низкого давления посредством канала, невидимого на фигуре, который будет описав ниже. Вследствие этого головные части лопастей гидравлического двигателя, расположенные в области низкого давления, также будут находиться под низким давлением, поскольку в этой области сверления 107 будут в постоянном контакте с коллектором 112.
Аналогично следует отметить, что набор камер гидравлического насоса в контакте с возвратным проходом 45 фиг. 5 и набор камер гидравлического двигателя в контакте с таким же проходом 47 фиг. 6 совместно с каналом, представленным возвратным проходом как таковым, его геометрия и вырезы 37 фиг. 3 и 57 фиг. 8 образуют единую камеру, так что поток жидкости от гидравлического насоса к гидравлическому двигателю насколько возможно гладок; это обусловлено также тем, что оба ротора вращаются в одном направлении, хотя и с разной скоростью, тем самым полностью используя инерцию жидкости.
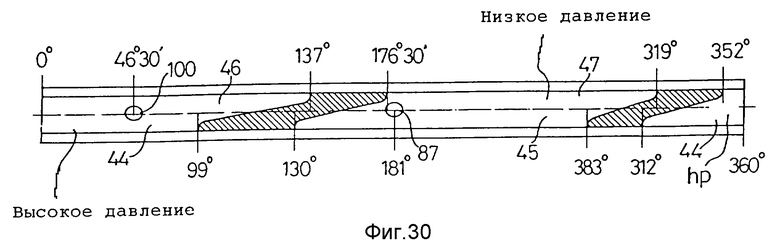
Что касается пропускной вставки, также образующей единое целое со сборкой привода, то с учетом сделанных ссылок на фиг. 5 и 6 следует отметить, что обычно эта пластина является монолитной, но не двойной, и ее движение по линии М фиг. 29 показано на фиг. 30. Здесь она показана двойной для обеспечения описания, поскольку отверстия проходов в области гидравлического насоса, 44 и 45 фиг. 5, сдвинуты по фазе относительно своих выходов 46 и 47 фиг. 6. В пропускной вставке имеются центральные отверстия 48 и 49, предназначенные для вала 28 фиг. 8; они имеют удлиненную форму, поскольку в противном случае за счет вращения сборки привода вокруг указанной геометрической оси 23, параллельной и удаленной на расстояние E от общей геометрической оси 22 двух роторов, поверхность 28 вала гидравлического двигателя прижмется к стенкам отверстий, препятствуя вращению. Следует помнить, что пропускная вставка также является частью сборки привода, которая, как замечено ранее, является интегрированным набором деталей.
Имеется также перепуск, предназначенный для сообщения камеры высокого давления гидравлического двигателя посредством входа 5 фиг.8 с камерой низкого давления гидравлического насоса черев выход 4 фиг. 3 при начальном положении α = 0 сборки привода. Это достигается в определенном положении собачки 6 фиг. 8, достигающей и защелкивающей шпиндель 6 фиг. 8 посредством гайки 58 той же фигуры; это положение меняется при зацеплении собачки в вырезе 2 фиг. 9, объединенном с корпусом, что приводит к повороту и закрывает перепуск. Сообщение жидкости между отверстием 5 фиг. 8 и отверстием 4 фиг. 3 происходит через сверление 60 фиг. 8, сверление 62 фиг. 6, сверление 61 фиг. 5 и сверление 63 фиг .3. Их работа будет описана ниже.
Для того, чтобы избежать усложнения трехмерной фигуры, на ней опущены клапан сброса давления при превышении рабочего давления и связанная с ним муфта. Однако обе детали показаны на фиг. 28.
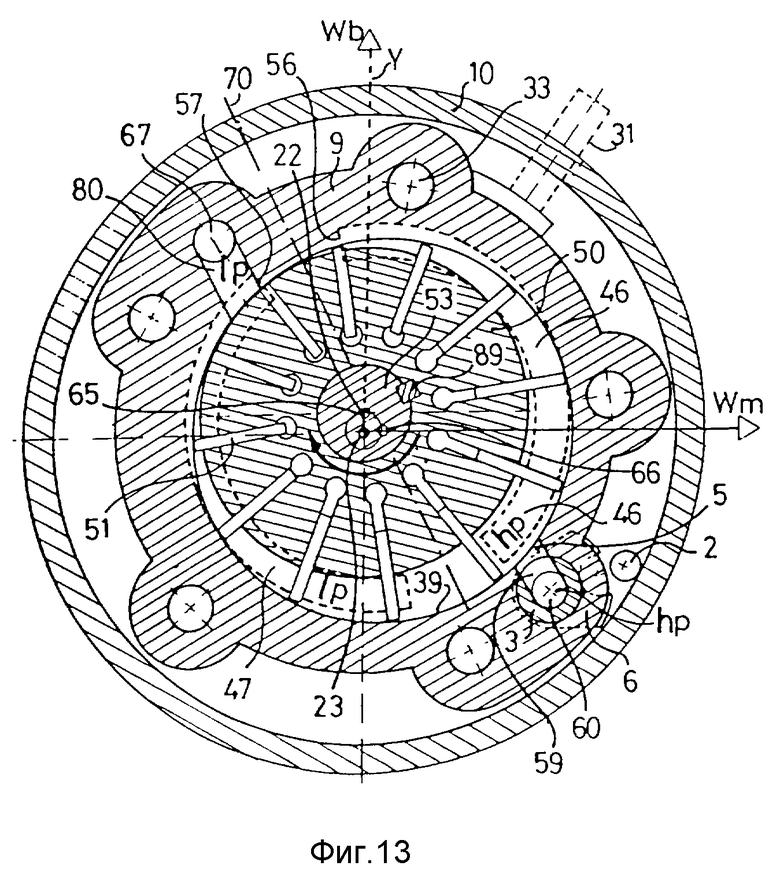
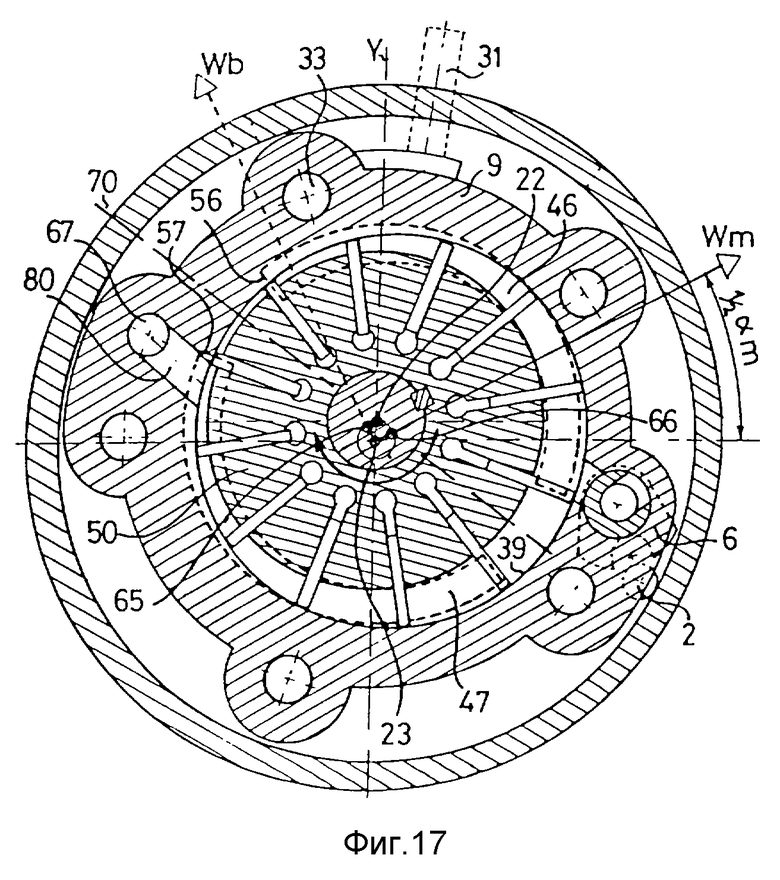
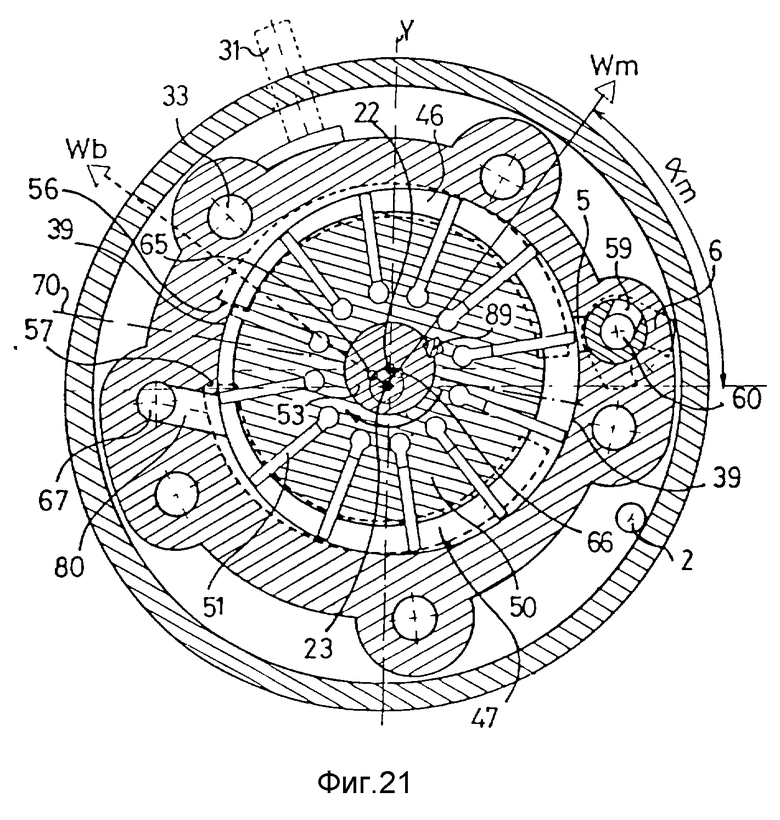
На фиг. 10-21 показаны три группы четырех разрезов, соответствующие трем различным рабочим положениям сборки привода. Первой считается группа фигур 10, 11, 12, 13, второй - группа фигур 14, 15, 16, 17 и третьей - группа фигур 18, 19, 20, 21. По соображениям места эти фигуры разделены на шесть отдельных листов. Ссылочные номера, использованные на этих фигурах для обозначения любых деталей, осей, каналов и так далее, те же, что использованы на предыдущих трехмерных видах, для ясности как элементов, которые будут описаны, так и их расположения. Было отмечено, что единственным отличием этих фигур является количество лопастей ротора 50 гидравлического двигателя, как показано на фигурах 13, 17 и 21, лопастей 12 вместо десяти, как показано на всех других фигурах для ротора гидравлического двигателя, в то время как ротор гидравлического насоса на фигурах 7, 10, 14, 18 и 27 имеет двенадцать лопастей. Это изменение в разумных пределах не меняет существенных аспектов изобретения.
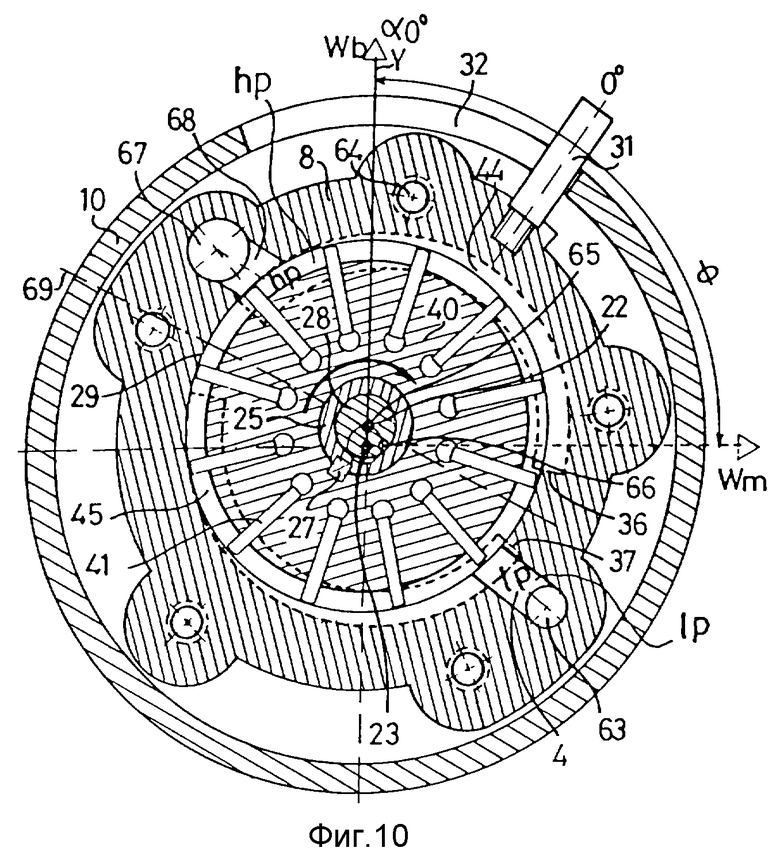
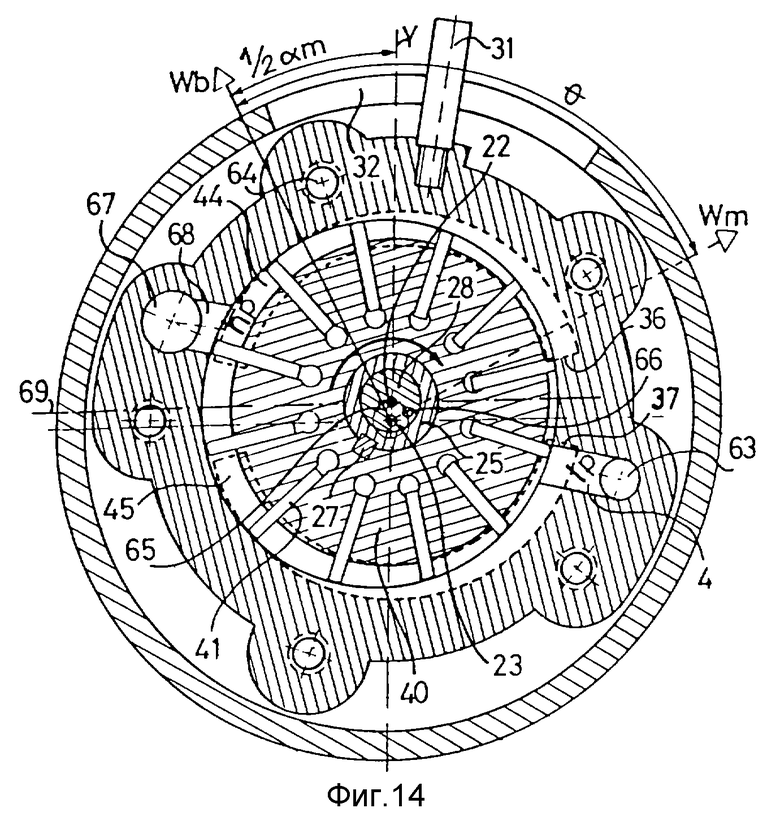
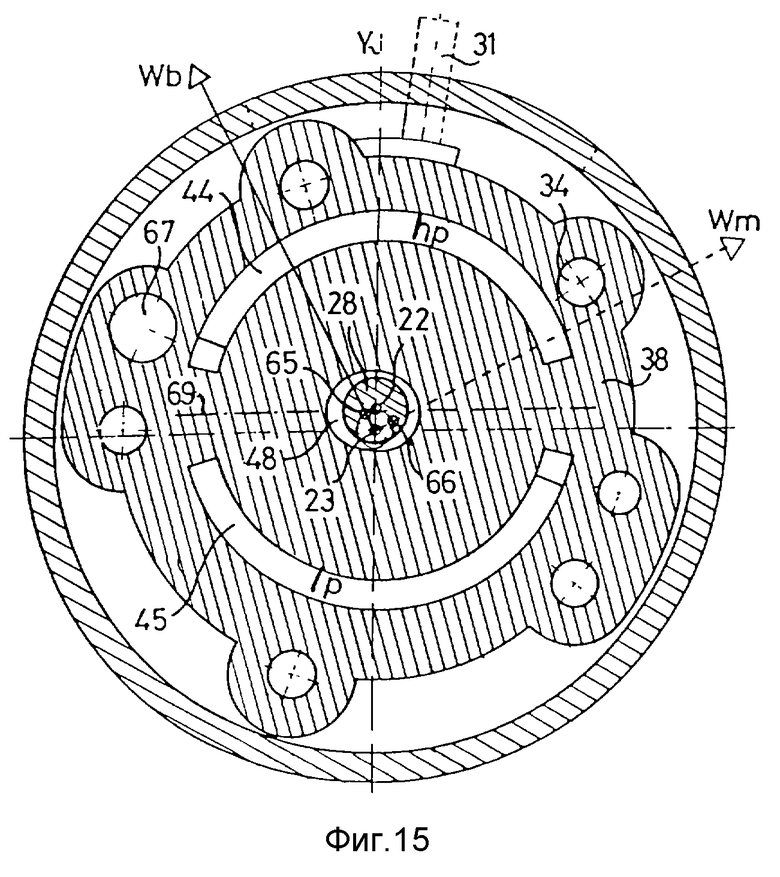
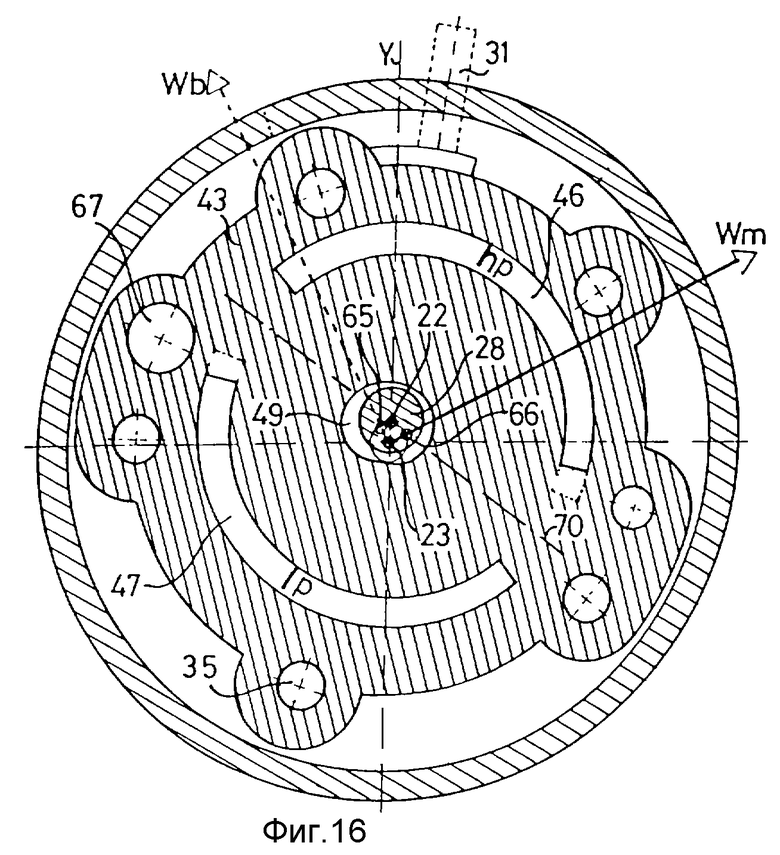
Первая группа фигур 10, 11, 12 и 13 демонстрирует четыре поперечных разреза для одного положения сборки привода, которое будем называть исходным положением и которое соответствует α = 0. Вторая группа, аналогичная и состоящая из фигур 14, 15, 16 и 17, показывает промежуточное положение сборки привода, соответствующее повороту α = 0,5*αм указанной сборки вокруг геометрической оси 23. Аналогично третья группа, состоящая из фигур 18, 19, 20 и 21, показывает конечное положение, соответствующее повороту.
В первой группе считается, что разрез фигуры 10 расположен выше такового фигуры 11, последний - выше фигуры 12, а этот в свою очередь - выше такового фигуры 13. Аналогично во второй группе фигура 14 расположена выше фигуры 15, последняя - выше фигуры 16, а фигура 16 а свою очередь - выше фигуры 17. Наконец, в третьей группе фигура 18 расположена выше фигуры 19, последняя - выше фигуры 20, а фигура 20 в свою очередь - выше фигуры 21.
В трех группах проведены две воображаемые линии Wb и Wm, соединяющие соответственно геометрическую ось вращения 23 сборки привода с геометрической осью 65 цилиндра гидравлического насоса и с геометрической осью 66 цилиндра гидравлического двигателя. Следует отметить, что как геометрическая ось роторов 22, так и геометрическая ось вращения сборки привода 23 всегда неподвижны по отношению к наружным элементам. Следовательно, третья воображаемая ось, обозначенная как ось Y, соединяющая общую геометрическую ось роторов 22 и геометрическую ось вращения сборки привода 23, остается неподвижной на всех фигурах. Следовательно, на всех фигурах угол поворота сборки привода вокруг геометрической оси 23 совпадает с углом, образованным осями Y и Wb.
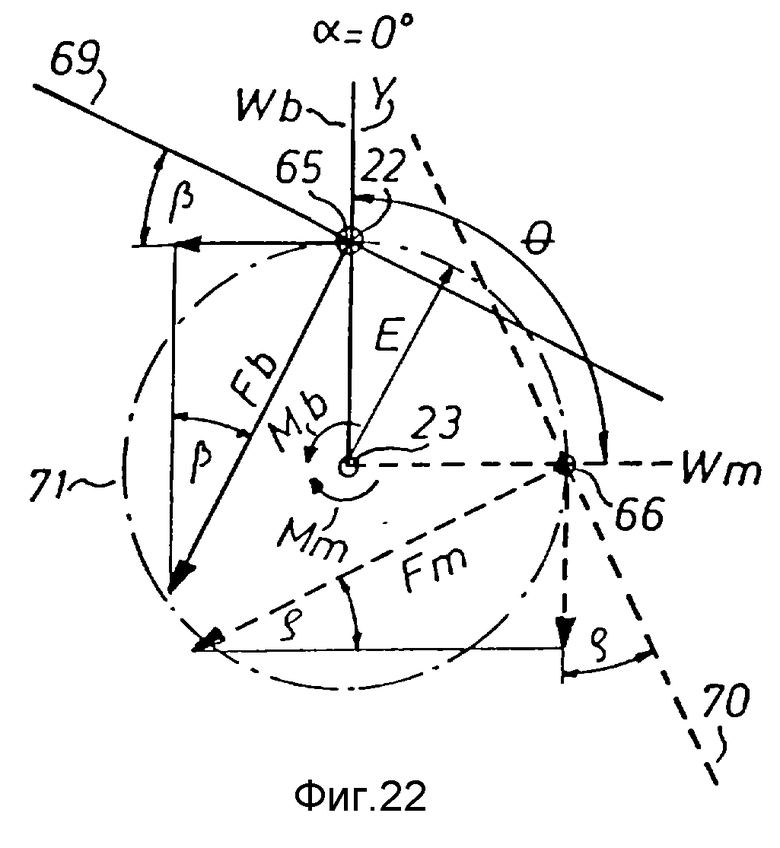
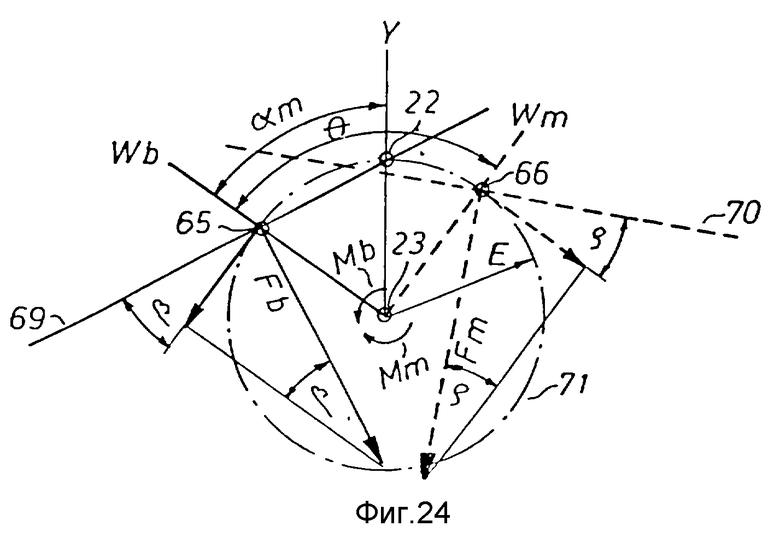
Центральная часть этих фигур более подробно показана на увеличенных фигурах 22, 23 и 24.
Фигуры 10, 14 и 18 показывают одинаковые разрезы гидравлического насоса, которые показаны на фигурах 3 и 4, в трех рабочих положениях. Рычаг 31 сборки привода можно видеть на этих фигурах в трех рабочих положениях вращающимся вокруг геометрической оси 23 в соответствие с углом и проходящим через щель 32 стационарного корпуса 10. Можно также видеть сверления с нарезкой 64, соединяющие корпус цилиндра гидравлического насоса 8 на фиг. 3 с остальной частью сборки привода, и цилиндр 29 гидравлического насоса. Также показаны вырезы 36 цилиндра в области высокого давления 44 и соответствующие вырезы 37 в области низкого давления 45, которые, как отмечено выше, предназначены для улучшения секционирования обоих наборов камер, объединить их и обеспечить улучшенное секционирование канала жидкости соответствующим проходам входа и возврата. Эти вырезы совпадают с секциями их соответствующих проходов в области контакта между ними. Можно видеть также ротор 40 гидравлического насоса и его вал 25 вместе с чекой 27, предназначенной для закрывания ротора гидравлического насоса и его вала. Можно также видеть вал 28 ротора гидравлического двигателя; этот вал концентричен изнутри валу ротора гидравлического насоса и может свободно поворачиваться в нем. На трех фигурах показаны также общая геометрическая ось 22 роторов и геометрическая ось вращения 23 сборки привода, обе оси неподвижны по отношению к внешним элементам. Для лучшего понимания работы сборки привода на этих трех фигурах также представлены геометрическая ось 65 цилиндра гидравлического насоса и геометрическая ось 66 цилиндра гидравлического двигателя. Следует отметить, что в этом варианте сборки привода расстояние между геометрической осью вращения 23 сборки привода и геометрической осью 65 цилиндра гидравлического насоса, определенное ранее как параметр эксцентриситета E, есть то самое расстояние E', которое имеется между геометрической осью вращения 23 сборки привода и геометрической осью 66 цилиндра гидравлического двигателя. Ясно, что это последнее расстояние может быть отлично от E в отличных от объясняемого вариантах сборки привода, но все характеристики остаются теми же. Более того показан перепускной канал 63 с его связью с камерой низкого давления, аналогично, канал 67 выпускного клапана с его связью 68 с камерой высокого давления. На других фигурах, ссылки на которые будут сделаны ниже, будут появляться большинство из уже описанных ссылочных номеров, и, следовательно, их объяснения не будут повторяться.
Фиг. 13, 17 и 21 представляют радиальное сечение гидравлического двигателя, показанного на фигурах 7 и 8, в трех рабочих положениях. На этих фигурах стержень 31 привода с переменной скоростью показан пунктирными линиями в трех представленных рабочих положениях при повороте вокруг геометрической оси 23 на заданный угол α. Можно также видеть сверления и соответствующие им болты 33, соединяющие корпус цилиндра гидравлического двигателя 9 на фиг. 8 с остальной сборкой привода так же, как и цилиндр 39 гидравлического двигателя. Показаны также вырезы 56 цилиндра в области высокого давления 46 и соответствующие вырезы 57 в области низкого давления, предназначенные, как описано выше, для улучшения секционирования обоих наборов камер, объединить их и обеспечить улучшенное секционирование канала жидкости к соответствующим проходам входа и возврата. Эти вырезы совпадают с секциями их соответствующих проходов в области контакта между ними. Можно видеть также ротор 40 гидравлического двигателя и его вал 53 вместе с чекой 89, предназначенной для закрывания ротора гидравлического двигателя и его вала. На трех фигурах также показаны общая геометрическая ось 22 роторов и геометрическая ось вращения 23 сборки привода, неподвижные по отношению к наружным элементам. Для лучшего понимания работы сборки привода на этих трех фигурах также представлены центр 65 цилиндра гидравлического двигателя и центр 66 цилиндра гидравлического двигателя, даже если последний не должен быть виден на этих трех фигурах.
Также показан канал 60 перепускного шарового затвора 3 с входами 5 и 59 со стороны камеры высокого давления. Имеется также перепускная собачка 6, поворот которой активирует шаровой затвор 3, и что в исходном положении α = 0 фиг. 13 находится в положении, полностью погруженном в выход 5 с промежуточным каналом 59. Поскольку последний сообщается с каналами 60, 62, 61, 63 и выходом 4, в этом положении имеет место полное сообщение между областью высокого давления и областью низкого давления, так что ротор гидравлического двигателя может двигаться свободно: это происходит за счет того, что жидкость, которую перемещает двигатель, не может быть воспринята гидравлическим насосом, поскольку последний имеет свои ротор и цилиндр концентрическими и не может перемещать никакой объем, но жидкость тем не менее может течь через перепуск. Если этого перепуска нет, ротор гидравлического двигателя в исходном положении вообще не может влиять на вращение. Когда вращение подводится к сборке привода, собачка 6 перепуска имеет прорезь 2, объединенную с корпусом, и таким образом к повороту так, чтобы задействовать шаровой затвор 3, и после нескольких градусов поворота сборки привода выход 5 и промежуточный канал 59 более не сообщаются и, следовательно, перепуск закрыт; это можно видеть в промежуточном положении фиг. 17 и, конечно, в конечном положении фиг. 21. Как только сообщение закрыто, вся жидкость, приходящая из гидравлического насоса через выходной проход 44 и 46, должна быть перемещена гидравлическим двигателем через проход возврата 47 и 45 к гидравлическому насосу; следовательно, соотношение между вращениями ротора гидравлического насоса постоянно и является функцией угла позиционирования α сборки привода. Аналогично, когда вращение подводится к сборке привода, возвращая его в направлении его начального положения, собачка перепуска снова входит в прорезь 2, что вынуждает последний поворачивать в направлении, противоположном описанному, и, следовательно, актуализировать затвор в противоположном направлении, снова приводя в сообщение промежуточный канал 59 с выходом 5, так что перепуск открывается. Интервал вращения сборки привода, в котором можно влиять на открытие или закрытие перепуска, можно изменить простым изменением положения прорези 59 фиг. 9 либо путем изменения ее фиксированного положения в корпусе, либо обеспечением возможности изменения позиции снаружи. В описываемом здесь приводе с переменной скоростью прорезь фиксирована. Нужно отметить, что в ряде возможных применений этого переменного привода можно не включать приспособление перепуска таким образом, что в положении α = 0 ротор гидравлического двигателя и его вал будут совершенно фиксированы, поскольку любое их движение вызовет вытеснение жидкости к гидравлическому насосу, который в этом положении не может воспринять любой объем жидкости, хотя ротор гидравлического насоса в этом положении имеет полную свободу вращения.
Входной канал 80 в область низкого давления также может сообщаться с предохранительным клапаном, помещенным в отверстие 67, которое не показано на фиг. 10-21, но видно на фиг. 28. Его функция заключается в поглощении любого избыточного давления по сравнению с рассматриваемым в качестве рабочего; в случае возникновения такого избыточного давления клапан, удерживающий изолированными камеру высокого давления и камеру низкого давления, активируется и сообщает эти камеры между собой, так что избыточное давление в области высокого давления будет уменьшаться вплоть до закрытия клапана, то есть до того момента, когда оно достигнет максимального рабочего давления.
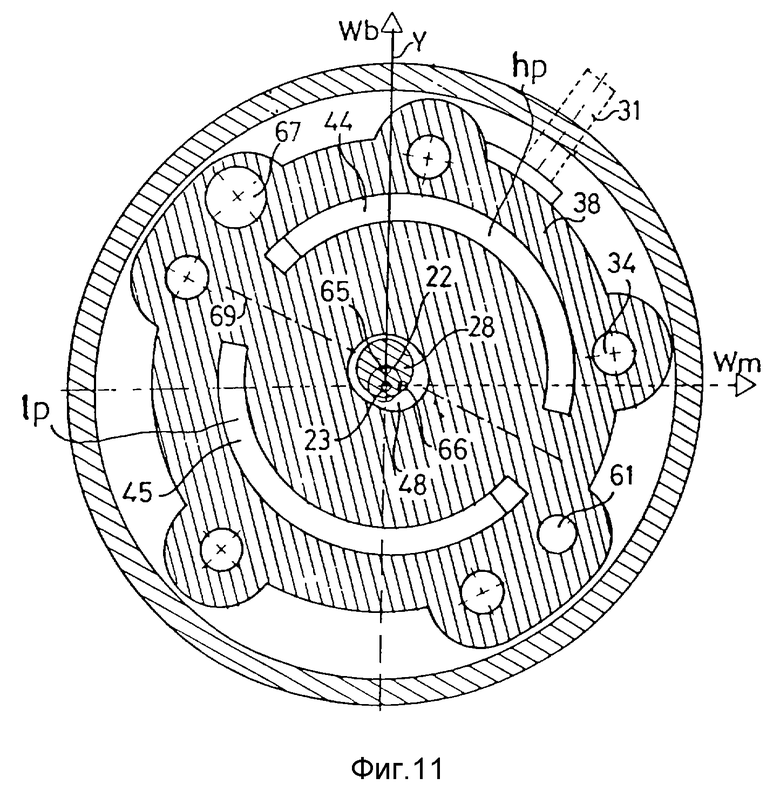
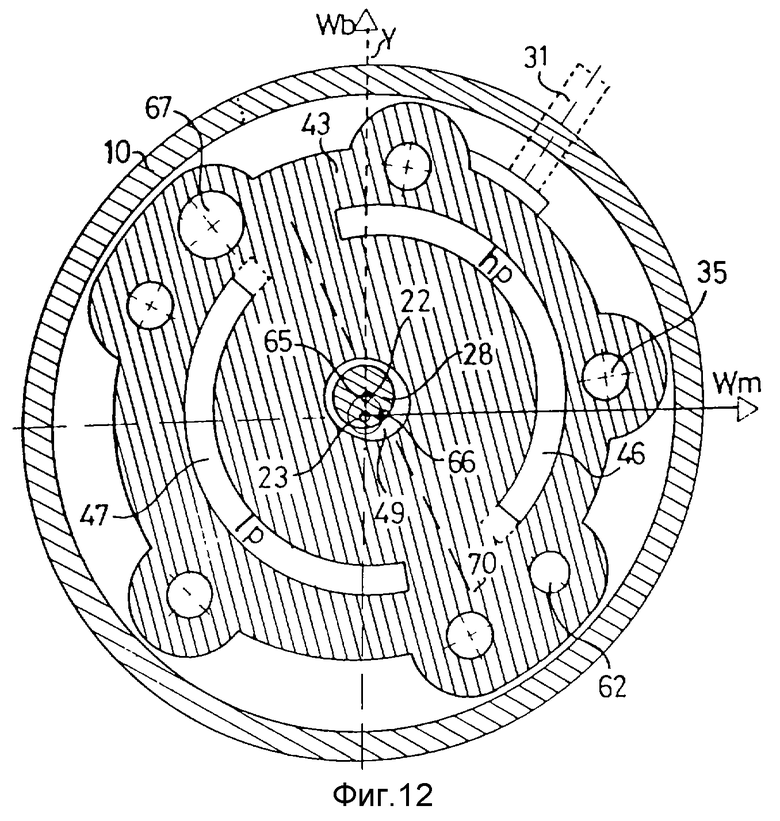
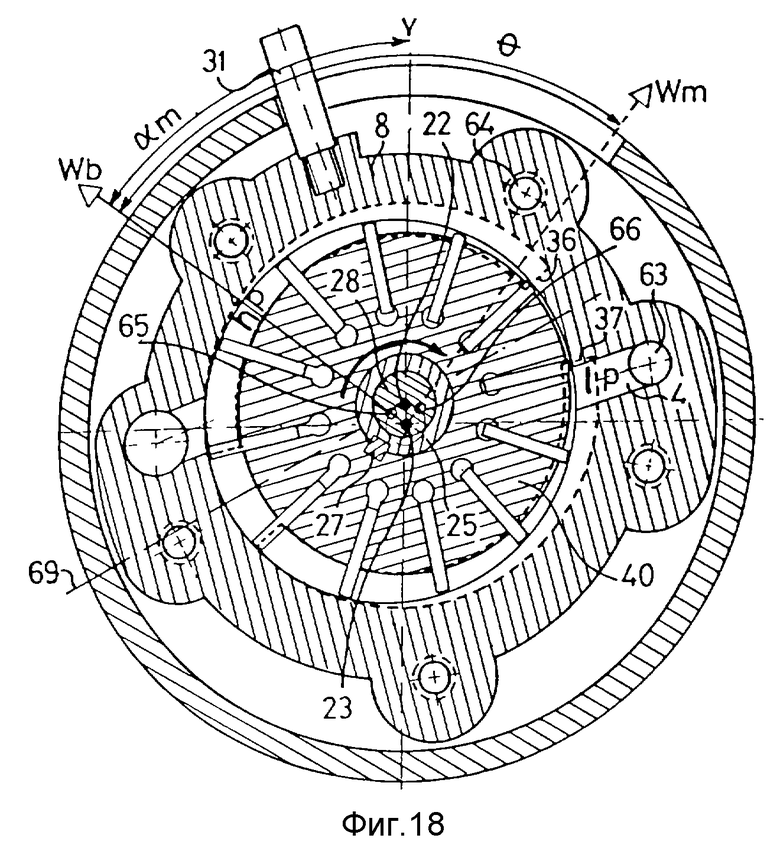
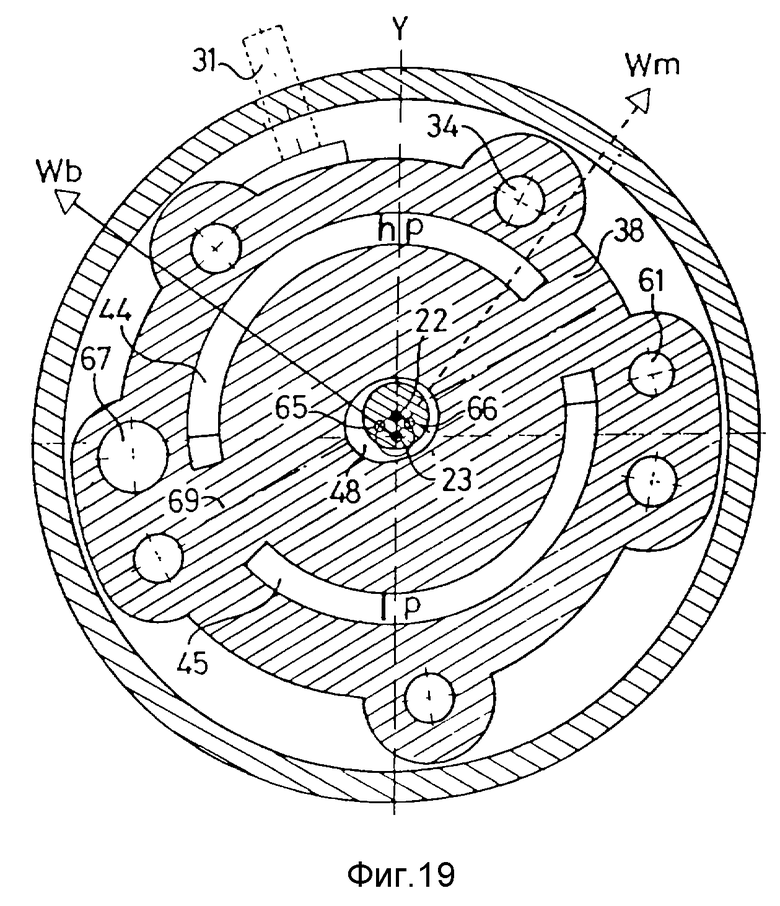
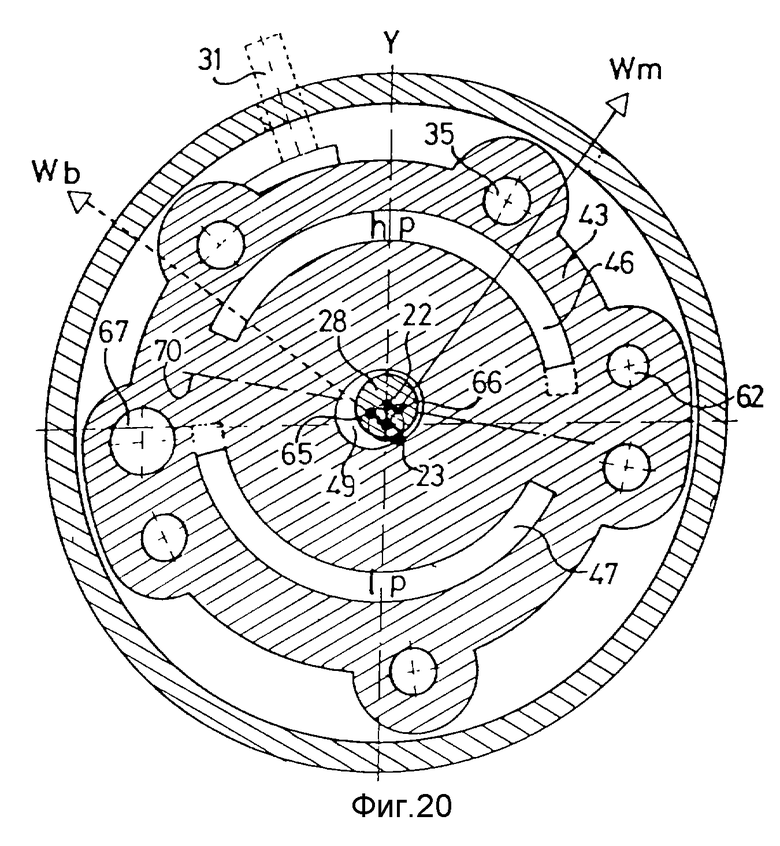
На фиг. 11, 15 и 19 показаны разрезы пропускной вставки в ее части, близкой к гидравлическому насосу, показанному на фиг. 5, в трех различных рабочих положениях. На фиг. 12, 16 и 20 показаны разрезы пропускной вставки в ее части, близкой к гидравлическому двигателю, показанному на фиг. 6, в трех различных рабочих положениях. Следует помнить, что, как заявлено ранее, пропускная вставка обычно является монолитной, как показано на диаграмме 30, которая представляет развернутое сечение по линии М на фиг. 29. Однако на трехмерной фигуре и листах, содержащих фиг. 10-21, указанная вставка показана двойной для лучшего перемещения в пропускной вставке между пропускной областью, близкой к гидравлическому насосу, отверстия 44 и 45, и пропускной областью, близкой к гидравлическому двигателю, отверстия 46 и 47. В парах фигур 11 и 12, 15 и 16 и, наконец, 19 и 20, соответствующих трем положениям сборки привода, показанным на фигурах 10-21, стержень 31 также показан пунктирной линией, даже если этот стержень не должен быть виден в этих разрезах. Следует отметить, что в исходном положении, показанном на фигурах 11 и 12, геометрическая ось 65 цилиндра гидравлического насоса совпадает с центром 22 роторов, так что ось Wb, соединяющая центр вращения 23 с центром 65 цилиндра гидравлического насоса, пересекается с осью, соединяющей геометрическую ось 23 с общей геометрической осью 22 роторов. Ось Wm соединяет геометрическую ось 23 с геометрической осью 66 цилиндра гидравлического двигателя. Таким образом, в начальном положении, поскольку общая геометрическая ось 22 роторов совпадает с геометрической осью 65, ротор гидравлического насоса концентричен с его цилиндром, и когда их вал заставляет их повернуться, то через выходной порт жидкость к гидравлическому двигателю не поступает, следовательно, ротор гидравлического двигателя не поворачивается. В промежуточном положении, показанном на фиг. 15 и 16, поворот сборки привода был осуществлен воздействием его стержня 31 и равен половине своей максимальной величины: геометрическая ось 65 цилиндра гидравлического насоса тем самым повернулась относительно геометрической оси 23 на угол α = 0,5*αм , уходя от геометрической оси 22 своего ротора; из-за поворота этого ротора и поскольку он более не концентричен со своим цилиндром гидравлический насос перемешает жидкость к гидравлическому двигателю через выходной проход. Аналогично, в этом промежуточном положении центр 66 цилиндра гидравлического двигателя повернут на угол α = 0,5*αм вокруг геометрической оси 23, и вследствие этого цилиндр гидравлического двигателя, который в исходном положении был максимально эксцентричен по отношению к своему ротору, в данном положении близок к концентричности с ним. Вся жидкость, вытесненная гидравлическим насосом в гидравлический двигатель через выходной проход 44 и 46 при вращении его ротора, должна вернуться от гидравлического двигателя к гидравлическому насосу через проход возврата 45 и 47; для этого ротор гидравлического двигателя вынужден вращаться на определенное количество оборотов в зависимости от положения его цилиндра по отношению к своему ротору в этот момент, чья геометрическая ось 22 неподвижна, и оно будет отлично от вращения ротора гидравлического насоса, за исключением одного определенного положения. В конечном положении, когда рычаг повернулся на угол α, что соответствует ситуации, в которой ротор гидравлического насоса полностью тангенциален к своему цилиндру, геометрическая ось 22 ротора гидравлического двигателя находится на минимальном расстоянии от геометрической оси 66 своего цилиндра; как следствие этого, если на вал ротора гидравлического насоса подается вращение, последний будет перемещать к гидравлическому двигателю максимальное количество жидкости через выходной проход и ротор гидравлического двигателя должен будет повернуться на максимальное число оборотов для каждой объемной единицы жидкости, полученной от гидравлического насоса, отношение или соотношение между поворотами ротора гидравлического двигателя и поворотами ротора гидравлического насоса максимально.
Общее уравнение для соотношения между угловой скоростью ωm(α) ротора гидравлического двигателя и угловой скоростью ωb, поданной на ротор гидравлического насоса, есть функция угла α, определяющего положение сборки привода:
где β есть угол между рассекателем 69 гидравлического насоса на фигуре 22 и перпендикуляром к оси Wb и ρ есть угол между рассекателем 70 гидравлического двигателя и перпендикуляром к оси Wm. Рассекатели и значения β и ρ в данном частном случае будут определены ниже. В данном уравнении θ есть угол между осями Wb и Wm, Hb и Hm есть соответственно толщина гидравлического насоса и гидравлического двигателя.
В этом конечном положении цилиндр гидравлического двигателя еще не концентричен со своим ротором, поскольку если бы это произошло, то гидравлический двигатель не смог бы перемещать никакой объем жидкости, полученный от гидравлического насоса, и это привело бы к коллапсу механизма. Этот коллапс не произойдет ни в одном из положений от 0 до αм, если θ больше αм. В частном описанном случае необходимо расширить цилиндр гидравлического двигателя для аккомодации ротора внутри цилиндра в исходных положениях.
Приведенное выше описание лучше понятно по увеличенной схеме фигуры 22, соответствующей начальному положению сборки привода α = 0, в котором геометрическая ось 65 цилиндра гидравлического насоса перекрывается с общей геометрической осью 22 роторов, по увеличенному виду фигуры 23, соответствующей промежуточному положению сборки привода α = 0,5αм, и по увеличенному виду фигуры 24, соответствующий конечному положению α = αм, в котором геометрическая ось 66 цилиндра гидравлического двигателя еще не достигла перекрытия с общей геометрической осью 22 роторов, но находится в своем ближайшем к ней положении. Замечено, что в любом возможном положении сборки привода геометрическая ось 65 цилиндра гидравлического насоса и геометрическая ось 66 цилиндра гидравлического двигателя лежат на окружности 71 с радиусом E, чьим центром является геометрическая ось вращения 23 сборки привода. Если расстояние между осью вращения 23 сборки привода и центром 66 цилиндра гидравлического двигателя отлично (E' отлично от E), то в любых возможных положениях сборки привода центр цилиндра гидравлического двигателя будет лежать на другой окружности, концентричной 71 и имеющей радиус E'. Фигуры 22, 23 и 24, показанные выше, предназначены для лучшего пояснения расчетов, которые предполагают, что для любого возможного привода с переменной скоростью из описанного здесь семейства и составляющего объект настоящего изобретения результирующий момент сборки привода к его геометрической оси вращения 23 есть нуль в любом рабочем положении, и это так в любом положении сборки привода в соответствии с одним из пунктов формулы настоящего изобретения.
Заметим, что рассекатель на фигуре 18 в области гидравлического насоса был определен как воображаемая прямая линия 69, которая в конечном положении проходит через центр 22 роторов и центр 65 цилиндра гидравлического насоса. Линия 69, повернутая на угол β = 0,5αм относительно горизонтали, проходящей через общую геометрическую ось 22 роторов, выбрана таким образом, что была найдена как наиболее благоприятная для искомых в настоящем изобретении эффектов, но могла быть выбрана другая линия. Рассекатель 69 гидравлического насоса также показан непрерывной линией на увеличенных фигурах 22, 23 и 24 с той же нумерацией, поскольку в процессе вращения он движется вместе со сборкой привода, он будет всегда образовывать одинаковый угол β = 0,5αм с перпендикуляром к Wb. На фигурах 10, 14 и 18 можно видеть, что прямая линия, разделяющая области высокого и низкого давления в гидравлическом насосе, будет поворачиваться относительно рассекателя 69 несколько раз за каждый оборот своего ротора, столько раз, сколько имеется камер, так что можно считать, что указанная прямая линия, рассекатель гидравлического насоса, есть линия, разделяющая области высокого и низкого давления гидравлического насоса. При изучении фигур 22, 23 и 24 можно видеть, что результирующей высоких давлений в гидравлическом насосе, действующей на сборку привода, будет вектор величиной Fb и в направлении, показанном на чертеже, который проходит через центр 65 цилиндра гидравлического насоса и имеет положительные углы к рассекателю 69 гидравлического насоса. Поскольку его величина известна и равна
Fb = 2HbRbP,
где Hb есть, как говорилось ранее, толщина гидравлического насоса, Rb - радиус цилиндра гидравлического насоса и P - высокое давление жидкости в данный момент, указанная сила получается как реакция только на внешний момент, взятый относительно геометрической оси вращения 23 сборки привода, который равен
Mb= EFbsin(β) = EFbsin(0,5αм).
Полагая, что рассекатель 70 гидравлического двигателя уже определен и поскольку он должен проходить через центр 66 цилиндра гидравлического двигателя и повернут на угол ρ относительно перпендикуляра к Wm через 66, результирующая сила высоких давлений, действующая на сборку привода со стороны гидравлического двигателя, будет вектором Fm, который, проходя через 66, будет иметь величину
Fm = 2HmRmP,
где Hm - толщина гидравлического двигателя, Rm - радиус цилиндра гидравлического двигателя и P - высокое давление жидкости в данный момент, поскольку безотносительно к возможным потерям давления в канале от гидравлического насоса к гидравлическому двигателю в камере высокого давления между ними практически нет дросселя. Указанная сила Fm образует по отношению к внешним элементам момент с началом отсчета на геометрической оси вращения 23 сборки привода, равный
Mm= -E′Fmsin(ρ).
Если мы теперь потребуем в качестве главного условия, чтобы результирующий момент, действующий на сборку привода, равнялся нулю, то получим
EFbsin(0,5αм)-E′Fmsin(ρ) = 0
и, таким образом,
ρ = arcsin(EFbsin(0,5αм)/(E′Fm),
подставляя соответствующие величины Fb и Fm, найдем
ρ = arcsin(EHbRbsin(0,5αм)/(E′HmRm),
и в случае, когда расстояние E' между геометрической осью 66 цилиндра гидравлического двигателя и общей геометрической осью 22 роторов равно параметру эксцентриситета E, то с учетом фигур 22, 23 и 24 уравнение упрощается до
ρ = arcsin(HbRbsin(0,5αм)/(HmRm).
Таким образом, в практическом решении по настоящему изобретению путем введения этих условий результирующий момент, действующий на сборку привода, будет практически равен нулю в любом из положений такового.
Рассекатель гидравлического двигателя всегда будет отклонен на указанный угол ρ для смещения рассекателя гидравлического насоса β = 0,5αм, обеспечивая тем самым нулевой момент, действующий на сборку привода в любом ее положении независимо от скорости вращения ротора гидравлического насоса. Для величин β, отличных от частного примера, приведенного на приложенных чертежах, следует выбрать другое значение ρ, так чтобы поддерживать нулевой момент, действующий на сборку привода, нулевым при любом положении последнего.
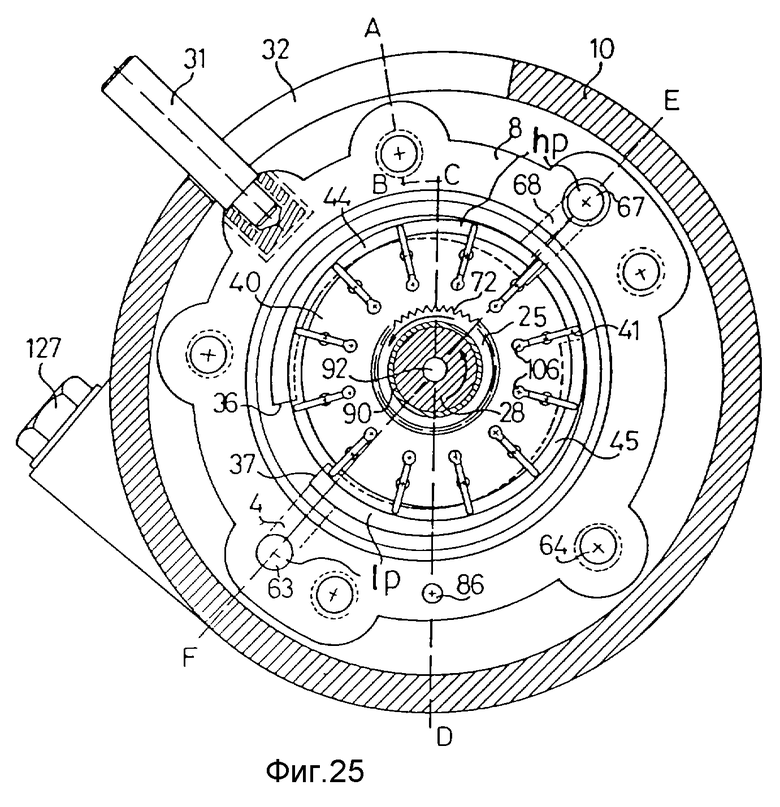
Путем разъяснения примеров фигур 25-30 показан привод с переменной скоростью, который может быть среди прочего использован в группе охлаждения для автомобильной промышленности. На этих фигурах использованы те же обозначения, что и ранее; следовательно, объяснения повторяться не будут, а будут даны разъяснения только дополнительных элементов, показанных на указанных фигурах, которые без изменения существа изобретения помогут полнее охватить механизм внутри сборки.
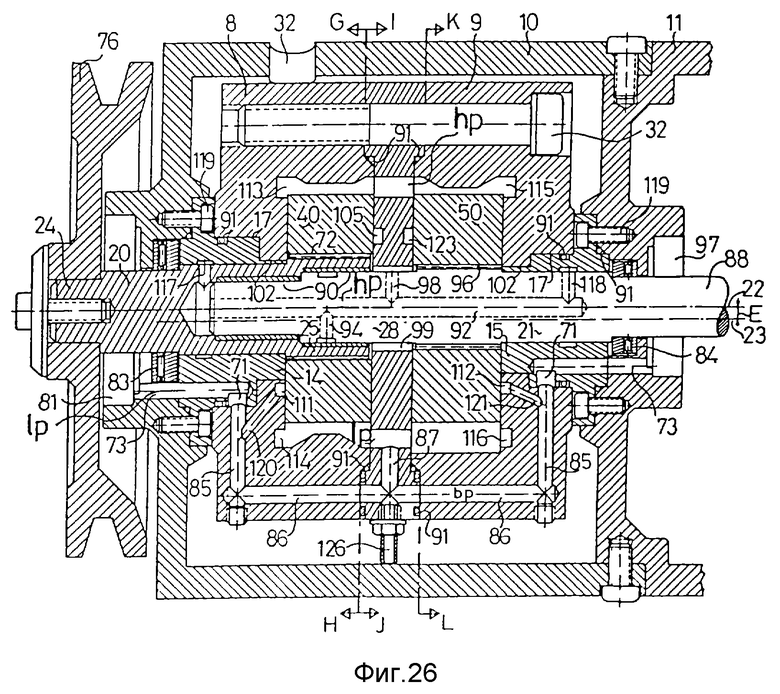
На фиг. 26 показан продольный разрез привода с переменной скоростью, взятый по линии A-B-C-D фигуры 25. На фиг. 28 показан продольный разрез привода с переменной скоростью, взятый по линии E-F фигуры 25.
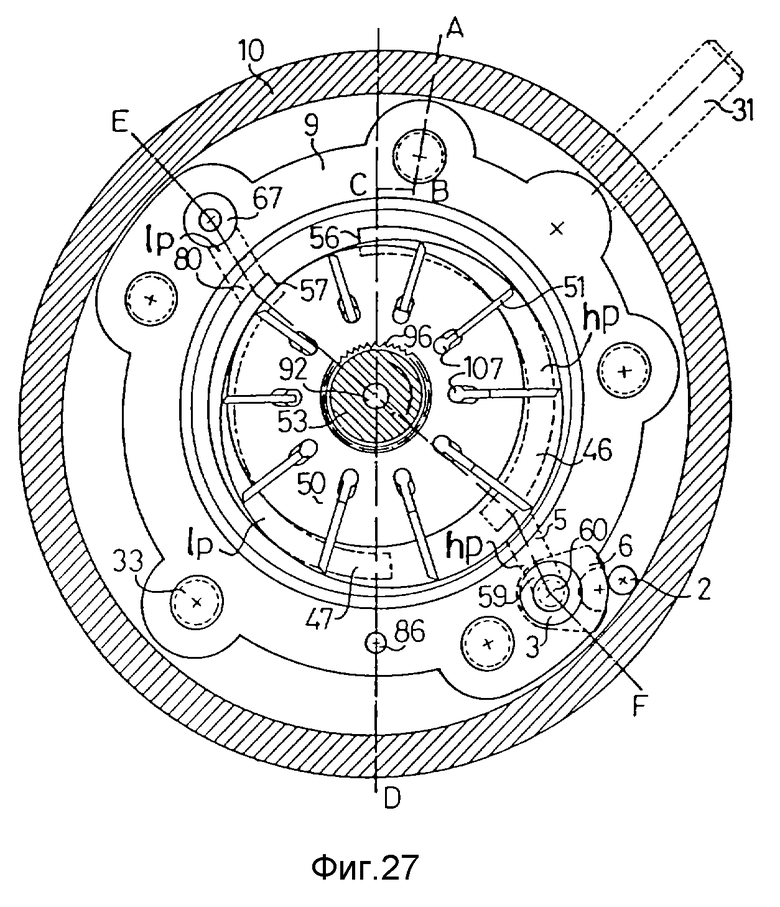
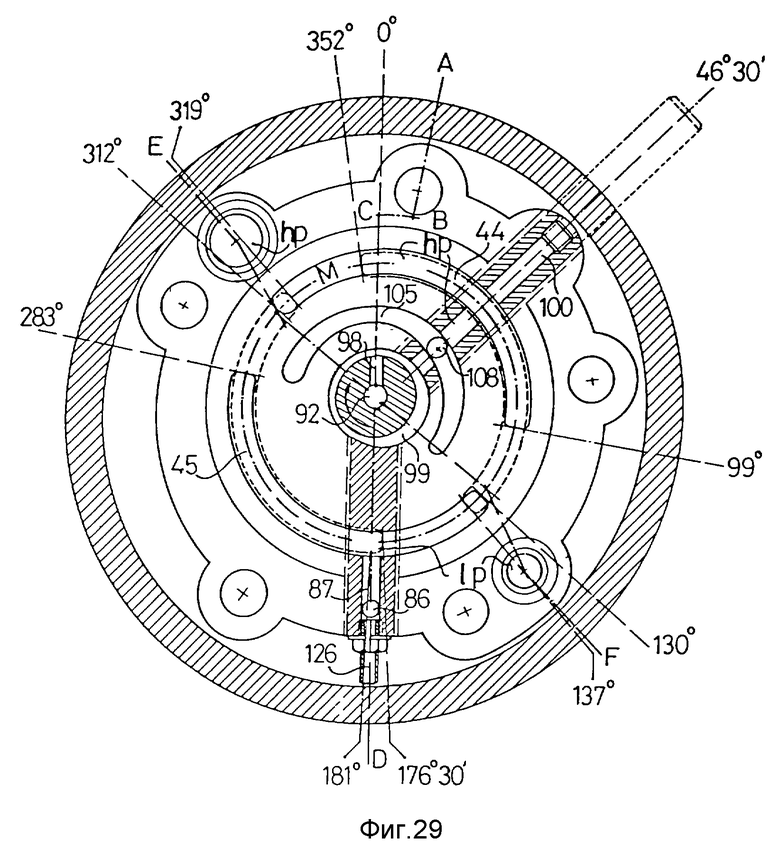
Фигура 25 есть вскрытый вид гидравлического насоса по линии G-H фигуры 26. Следует отметить, что ориентировка этого вида противоположна разрезам, показанным на фигурах 10, 14 и 18. На указанной фигуре 25 соединения 40 и 50 ротора с его валом 25 посредством чек 27 и 89 были заменены на шлицевые соединения 72 и 96, имеющие то же назначение, но позволяющие улучшить распределение напряжений, вносимых соединением. Вал 28 гидравлического двигателя также можно принять с его свободным вращением концентрично внутри вала 25 ротора гидравлического насоса посредством подшипников 90. Фигура 29 представляет вид по линии I-J фигуры 26, но с противоположной стороны по сравнению с фигурой 25, здесь показана пропускная вставка. Ориентация этой фигуры та же, что фигур 10-21. Аналогично, фигура 27 есть разрез гидравлического двигателя по линии K-L фигуры 26, который в этом случае ориентирован точно как разрезы гидравлического двигателя, показанные на фигурах 13, 17 и 21. На этих фигурах соединение ротора 50 с его валом 53 с помощью чеки 59 заменено на шлицевое соединение 96, имеющее то же назначение, но улучшенное распределение напряжений.
Фигура 26 показывает шкив 76, который будет соединен с ведущей системой. Указанный шкив выполнен как одно целое с валом 24 гидравлического насоса. Вырезы 81 и 97 предназначены для заглушек для жидкости, размещенных на обоих концах корпуса и служащих для уплотнения сборки. На фигуре показаны также несколько колец, все под номером 91, служащих для уплотнения возможного протекания жидкости, которое может происходить между деталями, как вращающимися, так и нет. В центральной части вала 21 гидравлического двигателя показан канал 92, направленный внутрь и концентричный, предназначенный для пропускания жидкости при высоком давлении, смазывающей подшипники трения 90 и двухэксцентриковые подшипники 14 и 15 через сверления 117 и 118. Вход высокого давления в указанный канал 92 осуществляется через канал 98, который сообщается с центральной полостью пропускной вставки, которая прежде имела номера 48 и 49, когда вставка была показана состоящей из двух частей, сейчас она монолитна и обозначена позицией 99. В свою очередь, сообщение из этой полости 99 в область высокого давления производится через радиальный канал 100, который проходит внутри пропускной вставки и показан на фигуре 29. Жидкость, которая могла бы выходить из двухэксцентриковых подшипников 14 и 15 между их валами и их посадкой, может привести к опасной осевой нагрузке на заглушке со стороны каналов 81 и 97, поскольку эта жидкость находится при высоком давлении. Для предотвращения этого пространство, остающееся между заглушками и их донной стенкой, сообщается с камерой низкого давления по каналам 73 и 71, которые являются статичными, поскольку расположены в двухэксцентриковых подшипниках 14 и 15. Этот канал 71 представляет собой щель, образованную в цилиндрической периферии подшипника 17, где сборка привода поворачивается в обе стороны, с угловым отверстием немного больше αм для того, чтобы канал 85 при обороте по указанной щели 71 мог совпадать с ней по всему пути своего оборота без прерывания потока жидкости. Этот канал 85 в свою очередь сообщается с каналами 86 и 87, которые обеспечивают ему сообщение с камерой низкого давления, потерянная жидкость таким образом восстанавливается и в свою очередь поступает к низкому давлению.
Давление, существующее в середине валов 20 и 21, формирует сильную нагрузку между ними, которая стремится разделить их в аксиальном направлении и которая поглощается аксиальными игольчатыми подшипниками 83 для вала гидравлического насоса и 84 для вала гидравлического двигателя.
На фигуре 26 показан также коллектор высокого давления 105, который перекрывается со сверлениями 106 в основании лопастей на фигуре 25, с отверстием, которое расположено от ведомого конца прохода низкого давления 45 до его ведущего конца, но измерено с обратной стороны, принимая также во внимание диаметр сверлений, выполненных в основании лопастей, чтобы скорректировать указанную апертуру как описано выше. Этот коллектор легче понять из фигуры 29, где показано также его сообщение с камерой высокого давления по сверлению 108, которое сообщается с каналом 100, соединяющим порты высокого давления 44 и 46 с полостью 99 пропускной вставки. На стороне, противоположной фигуре 29, имеется второй коллектор, такой же, но сдвинутый по фазе относительно предыдущего, не видимый на фигуре 29, но показанный на фигуре 26 под номером 123, он далее не описывается, поскольку имеет то же назначение и оно было описано выше. На фигуре 26 также показаны коллекторы 111 и 112 у оснований лопастей в зоне низкого давления, имеющие отверстие, которое, будучи прибавлено к коллекторам 105 и 123 высокого давления, дает примерно 360 угловых градусов, кратных 60, их отверстие скорректировано в зависимости от диаметра у основания лопастей. Эти коллекторы у основания лопастей сообщаются с камерами низкого давления посредством каналов 120 и 121 через каналы 85, 86 и 87. Это уже упоминалось и далее не объясняется.
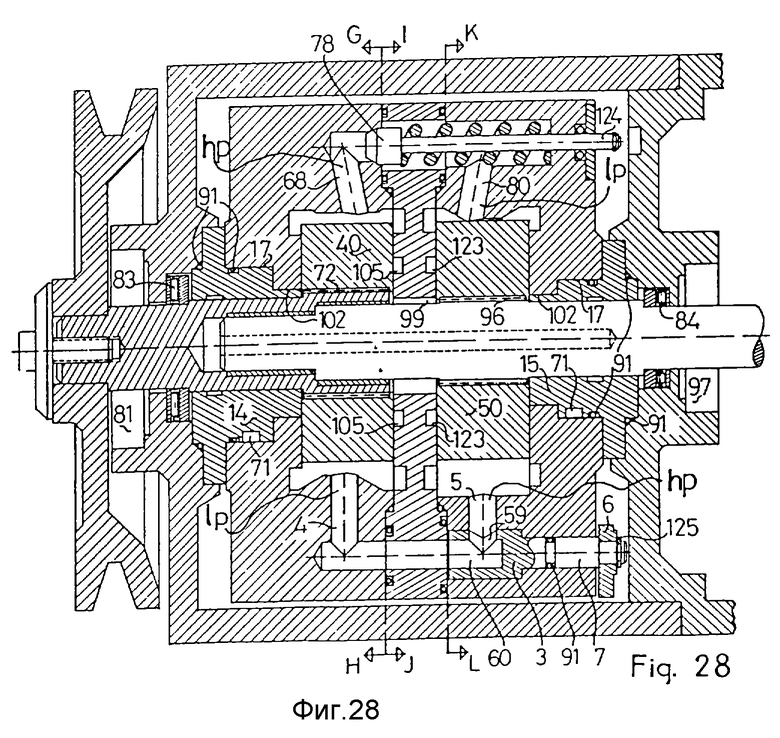
На фигуре 28 показан выпускной или предохранительный клапан, который в случае, если давление жидкости в области высокого давления превосходит максимально допустимое давление, откроет сообщение области высокого давления через канал 68 и области низкого давления через канал 80, так что давление снова сократится до максимально допустимого значения, указанное сообщение после этого снова будет прервано. Его разъяснение далее не будет расширено, поскольку мы считаем, что его работа достаточно понятна по фигуре 28. На этой фигуре чеки 16 фигуры 1 заменены болтами 119 фигуры 26 с тем же назначением, но более эффективным быстродействием. Гайка 58 шарового затвора фигуры 9 на фигуре 28 заменена упругим предохранительным кольцом, обозначенным позицией 125. На той же фигуре показан шпиндель 124, который за счет любого механизма толкает его наружу, открывая предохранительный клапан 78, с эффектом, аналогичным расцеплению.
На фигуре 25 показана крышка 127 для заправки компенсирующей жидкости, имеющая внутри стержень уровнемера, невидимый в этом разрезе, сверления 128 фигур 26 и 29 являются компенсирующими входами в сборку привода.
На всех фигурах был опущен регулятор, то есть устройство, соединенное с валом ротора гидравлического двигателя и которое должно активировать рычаг сборки привода для осуществления скорости вращения ротора гидравлического двигателя к определенному закону изменения или поддержания ее постоянной независимо от скорости вращения ротора гидравлического насоса. Механизм активации упомянутого рычага может быть очень прост. Указанный регулятор не включен в фигуры, поскольку могут применяться различные типы регуляторов, а их присоединение к этому приводу с регулируемой скоростью очень просто.
Одним из главных преимуществ настоящего изобретения является особая простота уплотнения сборки привода. На фигурах 1, 9, 26 и 28 можно видеть, что единственная возможная утечка жидкости во всей сборке привода может произойти в соединении между подшипниками 102 и их отверстиями 103 и 104 и в процессе взаимодействия валов 20 и 21 роторов в их подшипниках 14' и 13' на фигурах 1 и 9. Поскольку подгонка валов и подшипников является общей и нормальной в гидравлических крыльчатых насосах и двигателях и обычно корректно достигается, то мы ссылаемся только на подгонку 102 к 103 и 104, что одинаково с подгонкой валов и роторов 20 и 21, однако несколько большего диаметра, и с той деталью, что на практике величиной их вращения можно пренебречь, поскольку это происходит только тогда, когда приходит в действие механизм привода или рычаг для изменения скоростного отношения, так что их герметичность весьма эффективна с учетом уплотняющих колей 91; следовательно, эта система очень проста и эффективна за счет отсутствия трения и других возможных трудностей, которые могут вызывать другие системы уплотнения.
Что касается положения валов роторов, которое в иллюстрационном примере таково, что вал ротора гидравлического двигателя помещен внутри гидравлического насоса, но с возможностью вращения за счет подшипника 90, оба вала могут быть фиксированы своими наружными концами без физического контакта между собой как в некоторых известных крыльчатых насосах и двигателях, тем самым устраняя необходимость центрального отверстия пропускной вставки.
Из вышеприведенных пояснений очевидно, что настоящий привод с переменной скоростью очень прост и компактен, в совершенстве выполняет задачу изменения скорости и имеет очень малый объем.
Например, описанный и закрепленный в формуле изобретения привод с переменной скоростью работает без всяких проблем герметизации при давлениях 200 бар и более, передавая таким образом момент и мощность гораздо большие, чем в известных решениях; соотношение скоростей на входе и выходе может достигать 1:8.
Для примера можно отметить, что регулируемый привод по изобретению, способный передавать мощность 825НР, весит всего 234 кг; для меньших мощностей, например 70НР, переменный привод может весить всего 28 кг.
Благодаря этим преимуществам в большинстве случаев использование переменного привода по изобретению просто и недорого; следовательно, область возможных применений переменного привода очень широка. Некоторые из этих применений описаны ниже; однако этот выбор не может рассматриваться как ограничение.
В области инструментальных машин, таких как сверлильные станки, токарные станки, шлифовальные станки и тому подобное, переменный привод по изобретению позволяет непрерывно, легко и без значительных потерь менять скорость режущего инструмента или заготовки; например, для токарного станка оптимальная скорость резания может поддерживаться постоянной путем увеличения скорости заготовки по мере приближения инструмента к центру ее вращения.
Привод с переменной скоростью можно применять также в текстильных станках, все они имеют похожие проблемы. Например, в шпулечных машинах он простым способом и без затрат энергии решает проблему пуска и останова машины, устраняя необходимость в дорогостоящих муфтах и позволяя по желанию менять ускорение и замедление работы, что невозможно при использовании муфт; он также позволяет в любое время переходить от одной скорости к другой, например, для отбора проб. Другим важным преимуществом переменного привода по изобретению для применения в текстильных машинах является то, что он позволяет сократить мощность двигателя станка, поскольку при пуске не будет необходимости использовать высокую дополнительную мощность для преодоления сил инерции.
В автомобильной промышленности описанный переменный привод может заменить коробку передач и сцепление и обеспечить непрерывное изменение отношений скоростей; и, более того, при исследовании желаемых характеристик транспортного средства можно установить оптимальный момент для каждой скорости и запрограммировать контрольный механизм переменного привода так, чтобы установить оптимальное отношение между вращением колес и вращением двигателя. Можно даже без введения дополнительных модификаций запрограммировать различные параметры для разных режимов движения (город, шоссе, автострада и так далее) и предоставить водителю возможность выбрать один из них с панели управления транспортного средства.
Другое применение переменного привода определяется компрессорами кондиционеров: эти компрессоры достигают своей оптимальной рабочей точки для определенного количества об/мин, но они связаны с двигателем, имеющим переменное количество об/мин, и обычно они работают не при оптимальных для них об/мин. С помощью описанного переменного привода эта работа может контролироваться малой электронной схемой и двигателем очень небольшой мощности, можно установить желаемое число об/мин компрессора, то есть можно регулировать охлаждение, обеспечиваемое указанным компрессором со значительным усилением эффективности и эксплуатационных качеств.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА С МНОГОСТУПЕНЧАТЫМ РОТОРОМ | 2011 |
|
RU2501972C2 |
| Роторно-лопастной двигатель | 2002 |
|
RU2224121C1 |
| Закрытый роторный смеситель для полимерных материалов | 1979 |
|
SU967268A3 |
| Овально-цилиндровый двигатель внутреннего сгорания со скользящим ротором | 2024 |
|
RU2839381C1 |
| Сферический двигатель внутреннего сгорания | 2019 |
|
RU2701651C1 |
| ТЕПЛОВОЗ С РОТОРНО-ЛОПАСТНЫМ ДИЗЕЛЬНЫМ ДВИГАТЕЛЕМ | 2002 |
|
RU2231460C1 |
| ВЕРТОЛЕТНЫЙ ХВОСТОВОЙ ВИНТ С ПЕРЕМЕННОЙ СКОРОСТЬЮ С ГИДРОСТАТИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2445235C2 |
| СПОСОБ РАБОТЫ РОТОРНО-ЛОПАСТНОЙ МАШИНЫ (ВАРИАНТЫ) И РОТОРНО-ЛОПАСТНАЯ МАШИНА | 2013 |
|
RU2587506C2 |
| РОТОРНО-ПЛАСТИНЧАТАЯ МАШИНА С ОБЪЕМНЫМ РЕГУЛИРОВАНИЕМ (варианты) | 2017 |
|
RU2643886C1 |
| УСТРОЙСТВО ПРИВОДА ВСПОМОГАТЕЛЬНЫХ МЕХАНИЗМОВ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2006 |
|
RU2407902C2 |

Привод предназначен для гидравлических передач различных мобильных машин и механизмов. Он включает единый блок сборки привода, включающий цилиндр гидравлического насоса, цилиндр гидравлического двигателя, их концевые крышки и пропускную вставку с проходами или каналами для жидкости от гидравлического насоса к гидравлическому двигателю при высоком давлении и от гидравлического двигателя к гидравлическому насосу при малом давлении для замыкания контура. Валы роторов гидравлического насоса и гидравлического двигателя имеют общую геометрическую ось, неподвижную по отношению к внешним элементам, вокруг которой они могут независимо вращаться, это вращение является единственно возможным их движением. В свою очередь, сборка привода имеет свое единственно возможное движение - вращение вокруг геометрической оси, фиксированной по отношению к внешним элементам и отличной от геометрической оси цилиндра гидравлического насоса, от геометрической оси цилиндра гидравлического двигателя и от общей геометрической оси роторов. Вращение сборки привода приводится снаружи и приводит к тому, что цилиндр гидравлического насоса и цилиндр гидравлического двигателя сближают или отдаляют свои геометрические оси по отношению к таковым своих соответствующих роторов, тем самым вызывая изменение отношения между скоростями вращения ротора гидравлического насоса и ротора гидравлического двигателя. Технический результат - уменьшение габаритов. 8 з.п.ф-лы, 30 ил.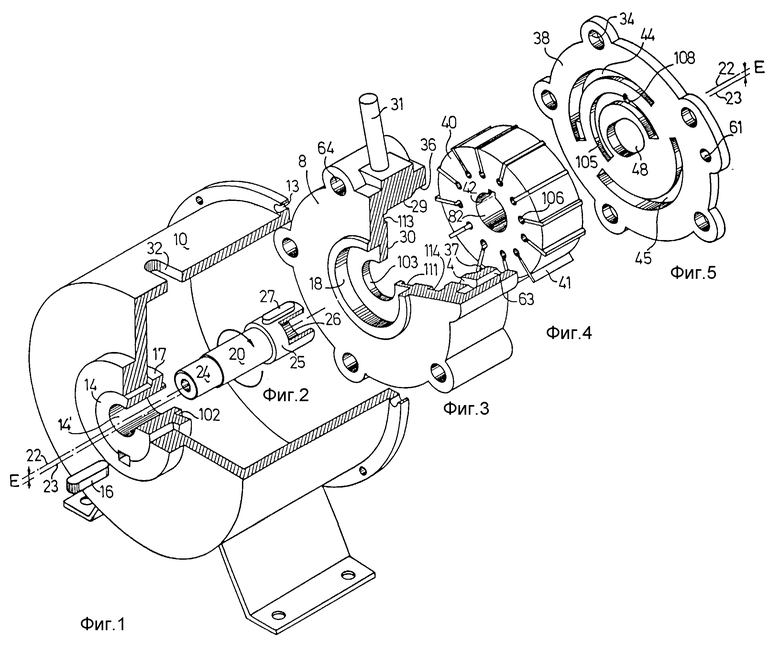
EHbsin(β)-E′HmRmsin(ρ) = 0,
где β - угол между рассекателем (69) гидравлического насоса и перпендикуляром к геометрической оси (Wb), соединяющей третью геометрическую ось (23) с геометрической осью (65) цилиндра гидравлического насоса; ρ - угол между рассекателем (70) гидравлического двигателя и перпендикуляром к геометрической оси (Wb), соединяющей третью геометрическую ось (23) с геометрической осью (65) цилиндра гидравлического двигателя; Hb и Hm - толщина гидравлического насоса и гидравлического двигателя, соответственно Rb и Rm радиусы цилиндра (29) гидравлического насоса и цилиндра (39) гидравлического двигателя, соответственно, E и E' - расстояния между третьей геометрической осью (23) и геометрическими осями (65, 66) цилиндра (29) гидравлического насоса и цилиндра (39) гидравлического двигателя соответственно, при этом момент, действующий на третью геометрическую ось (23) за счет давления жидкости, приложенного к цилиндру (29) гидравлического насоса, равен по величине и противоположен по направлению моменту, действующему на ту же ось (23) за счет давления жидкости, приложенного к цилиндру (39) гидравлического двигателя, результирующий момент на геометрической оси (23) равен нулю.
| FR 467612 A, 16.06.14 | |||
| Объемная регулируемая гидропередача | 1989 |
|
SU1712710A1 |
| Гидровариатор | 1988 |
|
SU1555572A1 |
| ГИДРАВЛИЧЕСКАЯ ПЕРЕДАЧА | 1925 |
|
SU7440A1 |
| ГИДРАВЛИЧЕСКАЯ ПЕРЕДАЧА | 1931 |
|
SU38671A1 |

