Изобретение относится к способам диагностики аномальных режимов функционирования реактивных двигателей (РД), используемых в авиационных и ракетно-космической отраслях техники, в частности к способам диагностики с помощью электрофизических параметров, измеряемых при истечении газовых струй газотурбинных и жидкостных РД.
Известны способы диагностики (Сидоренко М.К. "Виброметрия газотурбинных двигателей" М. Машиностроение, 1973 г.), основанные на измерениях температуры, давления, вибрации и других параметров. Информация, получаемая на основании измерения таких параметров, характеризует режимы функционирования отдельных блоков и узлов РД. По отношению к эксплуатационной надежности элементов, конструктивно расположенных в газовом тракте двигателя в условиях интенсивного воздействия тепловых и динамических нагрузок, такая информация носит опосредованный и усредненный характер. На основании ее анализа невозможно сделать однозначный и своевременный вывод о координатах и времени начала разрушений, например, форсунок, лопаток турбин, теплозащитных покрытий и т. д. Вывод о начале возможного процесса разрушений может быть сделан только после превышения штатных режимов по уровням температуры и вибрации, т. е. после того, как разрушение уже произошло.
Известны электрофизические способы диагностики аномальных режимов функционирования РД (патент США N 4587614 М. кл. G 08 В 29/00, F 02 С 7/32, 1986 г. ) посредством зондовых измерений нескомпенсированного электрического заряда истекающих газовых струй. Электрический заряд может быть вызван такими процессами, как неполное сгорание топлива, разрушение металлических и теплозащитных элементов при отклонении от режимов штатного функционирования насосов, форсунок, трубопроводов и т. п. В частности, в процессе эрозии и ускоренного разрушения конструктивных элементов образуется большое количество микрочастиц с размерами от 5 до 100 мкм, которые увлекаются и выносятся газовой струей. За счет высоких температур с поверхностей таких микрочастиц может иметь место термоэмиссия электронов. В зависимости от локальных перепадов давления (скорости) различные области струи, обтекающей конструктивные элементы, будут приобретать отрицательный или положительный заряды. Выбор диагностируемых областей осуществляют с учетом интенсивности и времени воздействия тепловых и динамических нагрузок на зонд. В каждую из таких областей газового тракта вводят зонд и измеряют напряжение сигналов флюктуирующего пространственного заряда относительно шумового порогового уровня. На основании анализа измеренных сигналов делают вывод о времени начала возникновения и пространственных координатах повреждения. Недостатками известного технического решения являются влияние вносимых зондом возмущений на режимы истечения в диагностируемых областях струи и зависимость ресурса зонда от интенсивности и времени воздействия тепловых и динамических нагрузок.
Из известных способов наиболее близким по технической сущности к заявляемому является способ диагностики аномальных режимов функционирования РД по авт. св. 1778715 М. кл. G 01 R 33/02, G 01 M 3/40, 1992 г. под названием "Способ измерений токов в плазме".
Известный способ заключается в том, что диагностику аномальных режимов функционирования РД осуществляют путем измерения собственных магнитных полей истекающих газовых струй с последующим сравнением измеряемых сигналов с эталонными. Измерения проводят с помощью кольцевого магнитного датчика. Датчик размещают вне расширяющейся части сопла и при измерениях перемещают вдоль оси двигателя в заданных пределах от его критического сечения. В случае режима функционирования, сопровождающегося нарушениями целостности элементов конструкции, может иметь место локальное увеличение плотности тока и индуцированного им собственного магнитного поля. В результате по сравнению со штатным режимом произойдет изменение уровня напряжения ЭДС сигнала на выходе датчика, что будет свидетельствовать о начале процесса разрушений.
Известное техническое решение на основе использования датчика, размещаемого вне истекающей струи, позволяет уменьшить вносимые им возмущения в рабочий процесс двигателя, а также влияние тепловых и динамических факторов на результаты диагностики. Однако использование магнитного датчика кольцевого типа, эффективная площадь измерений которого по плотности тока зависит от площади сечения профилированного сопла двигателя, будет характеризоваться низкой достоверностью в определении величины и координат локального изменения плотности тока струи, а также низкой помехозащищенностью.
Задачами, на решение которых направлено изобретение, являются увеличение достоверности и локальной избирательности измерений.
Поставленные задачи решаются за счет того, что в известном способе диагностики режимов функционирования реактивных двигателей путем измерения собственных магнитных полей истекающих газовых струй и последующего сравнения измеряемых сигналов с эталонными, контролируемое пространство вокруг двигателя разбивают на n (n > 1) поперечных или продольных сечений, в каждом сечении на/или вблизи внешней поверхности двигателя устанавливают k (k > 1) трехкомпонентных датчиков-антенн, одну из трех компонент каждого датчика ориентируют вдоль оси симметрии истекающей струи и конструкции двигателя, две другие - ортогонально к ней, измеряют три ортогональные компоненты флюктуаций сигналов электрических полей и три ортогональные компоненты флуктуаций сигналов магнитных полей реактивной струи, а при отсутствии струи измеряют соответствующие компоненты сигналов помеховых воздействий, проводят спектральный анализ результатов измерений, определяют взаимные спектральные и корреляционные характеристики между компонентами сигналов одинаковой ориентации для каждой пары датчиков двух соседних сечений, а также между компонентами сигналов каждого датчика и сигналами параметров рабочего процесса двигателя, корректируют полученные характеристики с учетом сигналов помеховых воздействий, выявляют спектральные составляющие аномальных (эрозионных) процессов в заданных диапазонах частот для различных режимов и временных интервалов, рассчитывают регрессивные зависимости между интенсивностями аномальных (эрозионных) процессов и параметрами функционирования двигателя, а для сравнения с эталонными сигналами преобразуют рассчитанные зависимости в соответствующие напряжения сигналов.
На фиг. 1 представлена блок-схема устройства, реализующего способ диагностики.
Обозначения:
1 - реактивный двигатель;
2 - истекающая газовая струя;
3 - подсистема измерений;
4 - подсистема обработки сигналов;
5 - подсистема аварийной защиты РД;
6 - система диагностики;
7, 8 - блоки системы питания и управления режимами функционирования РД соответственно;
9 - датчик параметра, определяющего рабочий процесс РД;
10 - трехкомпонентные датчики электрических и магнитных полей;
11, 12 - полосовые усилители - преобразователи сигналов датчиков 8 и 9 соответственно;
13 - аналого-цифровой преобразователь (АЦП);
14 - цифровые входы-выходы;
15 - контроллер прямого доступа к памяти (ПДП);
16 - центральный процессор (ЦП);
17 - цифроаналоговый преобразователь (ЦАП);
18 - оперативное запоминающее устройство (ОЗУ);
19 - программируемые счетчики-таймеры (СТ);
20 - кварцевый генератор опорной частоты;
21 - внешнее запоминающее устройство (ВЗУ);
22 - персональный компьютер (ПЭВМ);
23 - внутренняя область струи;
24 - внешняя область струи;
25 - сечение измерений, совпадающее с критическим сечением сопла;
26 - сечение измерений, совпадающее со срезом сопла РД;
Д11. . .Дnk - трехкомпонентные датчики-антенны электрических и магнитных полей;
Hz,Hr,Hϕ - компоненты сигналов магнитных полей;
Ez,Hr,Hϕ - компоненты сигналов электрических полей.
Входные сигналы датчиков 9 и 10 условно показаны стрелками.
Индекс n (n > 1) относится к сечениям измерений, индекс k (k > 1) -к номеру датчика. Oz,Or,ϕ - направление осей z и r и угла ϕ цилиндрической системы координат. Начало оси координат совмещено с плоскостью критического сечения РД. Направление оси Оz соответствует направлению оси симметрии конструкции и истечения реактивной струи РД.
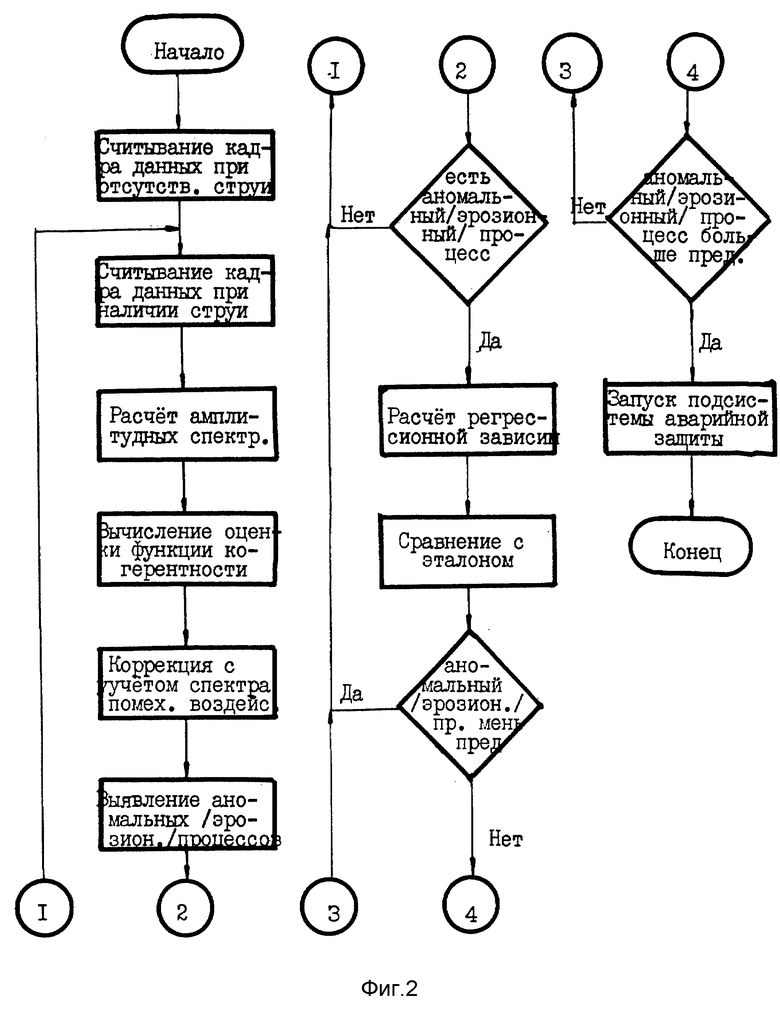
На фиг. 2 представлена блок-схема алгоритма формирования сигнала управления подсистемой аварийной защиты РД.
На фиг. 3 представлены результаты спектрального анализа флюктуаций компонент сигналов магнитного поля в контрольной точке на камере сгорания (КС) и пульсаций давления в КС.
Обозначения:
а-в- спектральные уровни компонент магнитного поля Hz, Hr, Hϕ соответственно;
г - спектральные уровни пульсаций давления Δp.
Частоты выделенных спектральных уровней указаны в Гц.
Результаты анализа относятся к одному и тому же временному интервалу от начала пуска РД.
Способ осуществляют следующим образом. Перед началом диагностики пространство вокруг двигателя 1 разбивают на n (n > 1) поперечных или продольных сечений. В каждом сечении на/или вблизи внешней поверхности двигателя 1 с наиболее ответственными по условиям функционирования элементами конструкции устанавливают k (k > 1) трехкомпонентных датчиков-антенн 10. Влияние тепловых и динамических факторов окружающей среды сводят к минимальным размещением чувствительных элементов каждого датчика в миниатюрном теплозащищенном моноблоке. В каждой контрольной точке, определяемой размерами датчика, одновременно измеряют три компоненты электрических и три компоненты магнитных полей. Ориентацию компонент различных полей каждого датчика выбирают попарно одинаковой. Одну из трех пар компонент ориентируют вдоль направления истечения струи, две другие - ортогонально к ней. Обеспечение достоверности результатов диагностики при высокой чувствительности измерительных каналов в условиях интенсивных электромагнитных помех технологического происхождения осуществляют посредством использования полосовых усилителей - преобразователей, а также измерений соответствующих компонент сигналов помеховых воздействий при отсутствии истечения струи.
При пуске двигателя 1 в соответствии с заданной циклограммой с помощью систем питания 7, управления 8 обеспечивают нормальный (штатный) режим функционирования, который контролируют датчиками 9 системы диагностики 6. Датчиками 10, установленными в контрольных точках сечения 26, при истечении струи в свободное пространство измеряют электрические и магнитные поля внешней области истечения 24. Датчиками 10, установленными между срезом сопла и критическим сечением измеряют электрические и магнитные поля внутренней области истечения 23.
Выходные сигналы датчиков 9 и 10, усиливают в заданных диапазонах частот с помощью полосовых усилителей - преобразователей 11 и 12 и подают на вход блока 13. Блок 13 функционирует в режиме программного управления с многоканальным вводом данных в режиме ПДП и последовательным опросом измерительных каналов от датчика 9 до датчиков 10 (Д11...Дnk). Из сигналов последовательных каналов одного цикла опроса на выходе АЦП формируют массив, который фиксируют в ОЗУ блока 18 в виде кадра данных. Блоки 14, 15 и 16 обеспечивают формирование текущих адресов ячеек ОЗУ и слежение за длиной кадра данных. По сигналу с блока 16 происходит отключение блока 15 с установкой стартового состояния регистра режимов блока 13. Временную синхронизацию ввода данных осуществляют с помощью блоков 19 и 20.
Завершив считывание, подсистема 4 переходит в режим обработки кадра данных в ОЗУ в соответствии с заданными по программе алгоритмами анализа сигналов. Сбор и обработка данных могут осуществляться по отдельным кадрам или одновременно с обменом массивами данных между ОЗУ и ВЗУ в режиме ПДП по командам блока 22 (на фиг. 1 не показано).
Выбор параметров запускающего импульса, междуканальной задержки и междукадрового интервала обеспечивают с учетом параметров измеряемых сигналов, количества опрашиваемых каналов (датчиков), аппаратных возможностей блока 21 и программного обеспечения подсистемы 4.
Обработку данных осуществляют расчетами амплитудных спектров измеряемых сигналов и взаимных спектральных и корреляционных характеристик между компонентами сигналов одинаковой ориентации для каждой пары датчиков двух соседних сечений, а также между компонентами сигналов каждого датчиками сигналами параметров рабочего процесса двигателя. Полученные характеристики корректируют с учетом сигналов помеховых воздействий, выявляют спектральные составляющие аномальных (эрозионных) процессов в заданных диапазонах частот для различных режимов и временных интервалов и рассчитывают регрессивные зависимости между уровнями (интенсивностями) аномальных (эрозионных) процессов и параметрами функционирования двигателя. Расчетные зависимости, хранящиеся в памяти ВЗУ, преобразуют в соответствующие напряжения сигналов, а затем сравнивают с уровнями эталонных (прогнозируемых) сигналов. Путем сравнения измеренных сигналов с эталонными судят об интенсивности и координатах начала возникновения разрушений и соответствующих значениях параметров режимов функционирования РД. При превышении измеренных уровней над эталонными формируют управляющий сигнал подсистемы аварийной защиты 5. С выхода 1 подсистемы 5 сигнал подают на вход блока 8 и блокируют аномальный режим функционирования РД.
Формирование сигнала управления осуществляют посредством вычисления спектрально-корреляционных характеристик измеряемых сигналов в соответствии с блок-схемой фиг. 2.
Известно, что истечение газовых струй РД сопровождается образованием нескомпенсированного положительного электрического заряда. Несмотря на незначительный вклад термической ионизации продуктов сгорания при температурах, развиваемых в КС РД на химическом топливе, вклад в возникновение нескомпенсированного заряда могут вносить также и другие процессы. Такими процессами могут быть хемоионизационные реакции с образованием сажевых частиц, начальные стадии нарушений целостности (эрозии) элементов конструкции с возникновением термоэмиссии электронов с поверхностей металлических и других микрочастиц. Процессы образования пространственного заряда и эмиссии заряженных частиц приводят к флюктуациям электропроводящих свойств, а следовательно, и к флюктуациям электрических и магнитных полей истекающей струи до среза 23 и за срезом 24 сопла РД. В результате сигналы датчиков подсистемы 3 по уровням и частотному диапазону флюктуаций будут зависеть от параметров режимов функционирования, пространственных и временных координат процессов истечения и разрушений.
По каналам датчик - преобразователь электрического поля измеряют поля излучения и плавающие потенциалы струи. Для каждой из компонент электрического поля в двух соседних контролируемых точках (в предположении близости электронных температур) имеем:
где U1, U2 - измеряемые потенциалы,
ξ - параметры функционирования РД,
η - интенсивность аномальных (эрозионных) процессов,
ω - частота флюктуаций электрического поля,
Δl - расстояние между контролируемыми точками, направление вектора поля.
направление вектора поля.
По каналам датчик - преобразователь магнитного поля измеряют флюктуации напряжений ЭДС сигналов, индуцируемых зарядами истекающей струи. Для каждой из компонент магнитного поля в контролируемой точке имеем:
где UД - напряжение ЭДС сигнала датчика,
SД - площадь сечения чувствительного элемента датчика,
μ0= 4π•10-7 Гн/м - магнитная проницаемость вакуума,
μ - относительная магнитная проницаемость среды,
ω - частота флюктуаций магнитного поля,
τ - время усреднения измерительного канала.
Флюктуации сигналов электрических и магнитных полей соотношений (1) и (2) могут быть представлены как многомерные нестационарные случайные процессы, которые несут информацию о динамике возникновения пространственных зарядов турбулентного поля давления в струе, интенсивности и пространственно-временных координатах аномальных (эрозионных) процессов, эволюции их перехода в стадию разрушений. Выявление значимых в статистическом смысле зависимостей между сигналами электрических и магнитных полей соотношений (1) и (2) и параметрами функционирования двигателя может быть выполнено на основе расчетов взаимных спектральных и корреляционных характеристик, в частности оценок функции когерентности, удовлетворяющей условиям:
В соотношениях (3) приняты следующие обозначения:



где Sx(f), Sy(f), Sxy(f), Rxy(t0) - спектральные плотности, взаимная спектральная плотность и взаимная корреляционная функция флюктуаций сигналов x(t) и y(t) соответственно, линейная частота флюктуации,
линейная частота флюктуации,
Δf - разрешающая способность анализа,
t0 - временной сдвиг между сигналами x(t) и y(t).
Символами x(t) и y(t) обозначены компоненты сигналов электрических и магнитных полей соотношений (1) и (2), а также сигналы параметров функционирования РД. Если в качестве параметра функционирования использовать сигнал пульсаций давления КС Δp, то из результатов расчетов соотношения (3), подтверждающих значимость соответствующих оценок функции когерентности и в заданных временном интервале и диапазоне частот, будет следовать:
где  то оценки интенсивности аномальных (эрозионных) процессов - значимы;
то оценки интенсивности аномальных (эрозионных) процессов - значимы;
где x(t) = Hz,r,ϕ(t,f,Δf), y(t) = Ez,r,ϕ(t,f,Δf), то оценки пространственно-временной эволюции интенсивностей аномальных (эрозионных) процессов - значимы.
Точность оценок соотношений (3а) и (3б) при заданной доверительной вероятности будет определяться доверительными интервалами функций когерентности.
На основании соотношений (1) - (4) рассчитывают регрессивные зависимости между интенсивностями аномальных (эрозионных) процессов и параметрами функционирования РД. Полученные расчетные зависимости преобразуют в напряжения сигналов управления подсистемой аварийной защиты. Точность оценки уровней сигналов управления при заданном режиме функционирования РД будет определяться доверительными интервалами интенсивностей аномальных (эрозионных) процессов. Сформированные сигналы сравнивают с эталонными и принимают решение о продолжении диагностики или о блокировке аномального режима.
Подсистема обработки сигналов 4 может быть реализована на базе ПЭВМ IBM PC AT с использованием программно-аппаратного комплекса ПОС, включающего плату многоканального АЦП LCARD типов L-203 - L-1610 и пакет программ обработки сигналов (Разработчик НПО "Мера" г. Мытищи М.О.). В качестве ПЭВМ может быть использован компьютер IBM PC на базе процессора Intel 486 с оперативной памятью на 8 Мб. Подсистема обработки сигналов обеспечивает преобразование аналоговых сигналов с погрешностью менее 0.2 %, расчет спектральных характеристик с погрешностью менее 0.4 %.
На основании вышеизложенного следует, что в отличие от известного способа, использование заявленного технического решения позволяет обеспечить увеличение достоверности и локальной избирательности измерений. Кроме того, сведены к минимальным как возмущения со стороны датчиков на рабочий процесс двигателя, так и влияние тепловых и динамических факторов окружающей среды на результаты измерений. Последнее достигалось конструктивным и технологическим исполнением датчиков-антенн, проведением измерений вне истекающей струи за срезом сопла, а также обеспечением высокой чувствительности и помехозащищенности измерительных каналов.
Полученные выводы подтверждаются результатами исследований, представленными на фиг. 3. Из сравнения зависимостей а - в с зависимостью г фиг. 3 следует, что спектры флюктуаций компонент магнитного поля и пульсаций давления КС РД представляют собой суперпозицию двух случайных процессов: широкополосного и узкополосного. На отдельных частотах спектров имеет место взаимная корреляция между локальными компонентами поля, а также между каждой из таких компонент и параметрами рабочего процесса РД. С другой стороны, известно, что наблюдаемый на спектре пульсации давления узкополосный случайный процесс может быть вызван неустойчивостями, связанными с нарушениями нормального режима КС. Наличие взаимной корреляции между спектральными составляющими различных сигналов свидетельствует о том, что посредством измерения электрофизических параметров можно проводить сравнение аномального (эрозионного) режима с нормальным, определять пространственные и временные координаты нарушений (разрушений) и формировать аппаратными средствами управляющие сигналы для блокирования таких режимов работы РД.
Использование заявленного технического решения по сравнению с известным позволяет:
- диагностировать режимы функционирования РД измерениями во внешней области внутри струи локальных значений компонент электрических и магнитных полей;
- диагностировать режимы функционирования РД измерениями вблизи стенок вне корпуса двигателя локальных значений компонент магнитных полей, индуцируемых истекающей газовой струей;
- определять при наличии взаимной корреляции между компонентами электрических и магнитных полей вне истекающей струи и параметрами двигателя интенсивность, пространственные и временные координаты ранних стадий нарушения целостности конструктивных элементов и обеспечивать автоматическое блокирование аномальных режимов функционирования РД;
- определять характер и природу неустойчивостей рабочего процесса РД, не внося возмущений в газодинамику истекающей струи;
- обеспечивать надежную эксплуатацию РД;
- увеличить достоверность результатов диагностики режимов функционирования РД.

Изобретение относится к способам диагностики аномальных режимов функционирования реактивных двигателей, используемых в авиационной и ракетно-космической отраслях техники. Технический результат заключается в повышении достоверности диагностики, который достигается за счет того, что контролируемое пространство вокруг двигателя разбивают на n (n > 1) поперечных или продольных сечений. В каждом сечении на/или вблизи внешней поверхности двигателя устанавливают k (k > 1) трехкомпонентных датчиков-антенн. Одну из трех компонент каждого датчика ориентируют вдоль оси симметрии истекающей струи и конструкции двигателя, две другие - ортогонально к ней. Измеряют три ортогональные компоненты флюктуаций сигналов электрических полей и три ортогональные компоненты флюктуаций сигналов магнитных полей реактивной струи, а при отсутствии струи измеряют соответствующие компоненты сигналов помеховых воздействий. Проводят спектральный анализ результатов измерений, определяют взаимные спектральные корреляционные характеристики между компонентами сигналов одинаковой ориентации для каждой пары датчиков двух соседних сечений, а также между компонентами сигналов каждого датчика и сигналами параметров рабочего процесса двигателя. Корректируют полученные характеристики с учетом сигналов помеховых воздействий, выявляют спектральные составляющие аномальных (эрозионных) процессов в заданных диапазонах частот для различных режимов и временных интервалов. Рассчитывают регрессивные зависимости между интенсивностями аномальных (эрозионных) процессов и параметрами функционирования двигателя, а для сравнения с эталонными сигналами преобразуют рассчитанные зависимости в соответствующие напряжения сигналов. 3 ил.
Способ диагностики аномальных режимов функционирования реактивных двигателей путем измерения собственных магнитных полей истекающих газовых струй и последующего сравнения измеряемых сигналов с эталонными, отличающийся тем, что контролируемое пространство вокруг двигателя разбивают на n (n > 1) поперечных или продольных сечений, в каждом сечении вблизи внешней поверхности двигателя устанавливают k (k > 1) трехкомпонентных датчиков-антенн, одну из трех компонент каждого датчика ориентируют вдоль оси симметрии истекающей струи и конструкции двигателя, две другие - ортогонально к ней, измеряют три ортогональные компоненты флюктуаций сигналов электрических полей и три ортогональные компоненты флюктуаций сигналов магнитных полей реактивной струи, а при отсутствии струи измеряют соответствующие компоненты сигналов помеховых воздействий, проводят спектральный анализ результатов измерений, определяют взаимные спектральные и корреляционные характеристики между компонентами сигналов одинаковой ориентации для каждой пары датчиков двух соседних сечений, а также между компонентами сигналов каждого датчика и сигналами параметров рабочего процесса двигателя, корректируют полученные характеристики с учетом сигналов помеховых воздействий, выявляют спектральные составляющие аномальных (эрозионных) процессов в заданных диапазонах частот для различных режимов и временных интервалов, рассчитывают регрессивные зависимости между интенсивностью аномальных (эрозионных) процессов и параметрами функционирования двигателя, а для сравнения с эталонными сигналами преобразуют рассчитанные зависимости в соответствующие напряжения сигналов.
| Способ измерения токов в плазме | 1991 |
|
SU1778715A1 |
| US 4587614 A, 06.05.86 | |||
| RU 94001550 A1, 20.09.95 | |||
| СПОСОБ ВЕКТОРНЫХ МАГНИТНЫХ ИЗМЕРЕНИЙ | 1991 |
|
RU2069374C1 |
| RU 94012688 A1, 10.12.95. | |||

