Изобретение относится к измерительной технике, в частности к технике высокоточных измерений посредством сопрягаемых с волоконными световодами (ВС) оптических датчиков (ОД), в том числе и волоконно-оптических (ВОД), чувствительные элементы которых выполнены на основе ВС.
По способу представления выходных данных известны цифровые (импульсные) и аналоговые ОД (АОД). Первые, при изменении воздействующих на них измеряемых величин, дискретно (импульсно) изменяют уровень выходного сигнала; вторые - в соответствии с изменениями измеряемых величин непрерывно (аналоговым образом) модулируют какой-либо параметр (интенсивность, частоту, фазу или угол поворота плоскости поляризации) проходящего через них потока оптического излучения. Конструктивно и в эксплуатации существенно проще аналоговые ВОД.
Известен АОД ускорения [1], содержащий корпус с закрепленной в нем консольно упругой пластиной, на свободном конце которой закреплена инерционная масса (ИМ), торцевая поверхность которой, перпендикулярная плоскости пластины, выполнена зеркальной. Напротив зеркальной поверхности расположены торцы трех лежащих в одной плоскости концов волоконных световодов (ВС), жестко закрепленных в корпусе так, что их оси лежат в плоскости, перпендикулярной плоскости упругой пластины. Оптическая схема АОД отъюстирована так, что в отсутствие ускорения объекта, несущего АОД, световое излучение, выходящее из торца среднего ВС, после отражения от зеркала равномерно распределяется между торцами прилегающих к нему соседних ВС. Появление ускорения, вектор которого (или его составляющая) перпендикулярен плоскости упругой пластины, приводит к смещению ИМ и тем самым к изменению долей потока излучения, попадающего в торцы приемных ВС. Дифференциальная схема рассогласования формирует разностный сигнал, пропорциональный величине действующего на АОД ускорения.
Недостатками такого АОД можно считать его "однокоординатность" и невысокую пороговую чувствительность, определяемую жесткостью пластины и величиной ИМ.
Более высокой пороговой чувствительностью и двумя осями чувствительности обладает АОД ускорения [2], взятый нами в качестве прототипа. АОД-прототип содержит корпус с закрепленным в нем консольно концом отрезка ВС, на свободный конец консоли которого одета своим сквозным отверстием и закреплена на нем ИМ так, чтобы поток излучения свободно выходил из торца ВС, напротив которого расположен закрепленный в корпусе зеркальный отражатель. При воздействии на АОД ускорения, вектор которого (или его составляющая) перпендикулярен оси ВС, часть потока излучения, зависящая от величины ускорения, возвращается обратно в ВС и с помощью Y-образного волоконно-оптического разветвителя-сумматора поступает на оптоэлектронный анализирующий блок.
Главным недостатком АОД-прототипа, как и любых других сопрягаемых с ВС АОД, является низкая точность производимых с их помощью измерений. Реальная величина предельнодостижимой минимальной относительной погрешности измерений для них составляет 10-1-10-2% [3].
Задачей настоящего изобретения является разработка импульсного ВОД, сочетающего в себе простоту конструкции, свойственную АОД, с возможностью проведения высокоточных измерений, свойственную цифровым ОД. Такой ВОД может служить основой построения трехкоординатного прецизионного цифрового волоконно-оптического акселерометра для измерения линейных ускорений, в том числе и сверхмалых, в широком динамическом диапазоне.
Поставленная задача решается тем, что в ВОД, содержащем корпус с закрепленным в нем отражателем, волоконный световод, часть которого консольно закреплена в корпусе, инерционную массу, закрепленную на свободном конце консоли ВС, размещенного в выполненном в ИМ сквозном отверстии, причем торец свободного конца консоли ВС расположен над отражателем, введены катушки индуктивности, установленные в корпусе симметрично оси консоли ВС, отражатель выполнен в виде вогнутого зеркала, образованного двумя цилиндрическими поверхностями, ограниченными плоскостью. При этом оси цилиндрических поверхностей взаимноперпендикулярны, лежат в одной плоскости и пересекаются с осью ВС под прямыми углами над ограничивающей плоскостью, а центр масс ИМ, выполненной из магнитомягкого материала, лежит на оси ВС.
Для повышения точности измерений (в случае использования, многомодового ВС) в плоскости торца свободного конца консоли ВС может располагаться модулирующий растр из чередующихся прозрачных и непрозрачных концентрических круговых полос. При этом центральный прозрачный круг растра имеет диаметр 0,1d (d - диаметр световедущего сердечника ВС), а остальные круги растра имеют ширину круговых полос 0,15d, причем центр круговых растров совпадает с центром торца ВС. Растр может быть выполненным как непосредственно на торце ВС, так и на прозрачном основании с последующим закреплением его на торце ВС. При использовании одномодового ВС модулирующий растр не нужен.
Сопоставительный анализ с прототипом и с другими аналогичными техническими решениями позволяет заключить, что предлагаемое техническое решение не является частью уровня техники, т.е. соответствует критерию "новизна".
Анализ признаков предлагаемого технического решения и сопоставление с уровнем техники в данной области, а также в других областях, показывает, что вновь введенные признаки не вытекают явным образом из уровня техники, таким образом, предлагаемое техническое решение имеет изобретательский уровень.
Основной недостаток АОД-прототипа (принципиально невысокая точность реализуемых с его помощью измерений) обусловлен метрологически низким качеством проходящего через него потока оптического излучения, выполняющего в АОД одновременно роль и носителя, и реципиента информации - большой уровень его собственных шумов при малом общем уровне интенсивности. При этом простое увеличение мощности оптического потока в измерительном тракте АОД не может радикальным образом улучшить ситуацию. Во-первых, вместе с ростом мощности потока оптического излучения пропорционально корню квадратному из ее величины растет также и мощность собственных (фотонных или, как их принято называть, дробовых) шумов потока, т.е. 1000-кратное увеличение оптической мощности в измерительном тракте АОД может в итоге дать только 30-кратное увеличение точности измерений. Во-вторых, ввод в ВС больших уровней мощности (≈ 1 Вт для стандартных многомодовых ВС типа "кварц-кварц" с диаметром световедущего сердечника 50 мкм) вызывает в них нелинейные эффекты, нарушающие сам принцип аналоговых измерений, лежащий в основе работы АОД. Все вышесказанное в полной мере относится к любым типам АОД (модулирующих интенсивность, фазу, частоту или угол поворота плоскости поляризации проходящего через них потока излучения), поскольку осуществляемая ими модуляция любого из перечисленных параметров оптического излучения в конечном счете (перед подачей на ФП) должна быть преобразована в модуляцию интенсивности, интегральные изменения которой только и могут воспринимать все существующие на сегодняшний день ФП.
Анализируя вышеизложенное, приходим к выводу, что для повышения точности измерений нужно пересмотреть идеологию как самих принципов формирования информативного сигнала в сопрягаемых с ВС ОД, так и принцип последующей его электрической обработки, и переходить от аналоговых к цифровым (импульсным, счетным) принципам измерений. Необходимо отказаться от аналоговой модуляции оптических параметров потока излучения и переходить к неаналоговой (дискретной) модуляции, вводя тем самым в поток излучения новые, неоптические, параметры, которые и будут выполнять роль реципиентов информации. Это позволит сохранить все достоинства ВО (носителем информации, как и прежде, остается поток оптического излучения), однако проблема точности измерений больше не будет связанной с проблемой измерения интенсивности маломощного потока оптического излучения - она переносится из области оптических измерений в другие, неоптические, области, где этих проблем либо нет в принципе, либо они решены на должном уровне.
В общем случае неаналоговой модуляции потока излучения информация может накладываться либо на его дискретно-пространственное (координатное) распределение, либо на дискретно-временное (импульсное).
В первом случае информация кодируется пространственным расположением выходящих из ОД оптических (потоков) сигналов.
Во втором случае информационным параметром импульсной последовательности может быть:
- само число импульсов (процесс измерения в этом случае может сводиться просто к счету, который в принципе может быть произведен безошибочно);
- частота следования импульсов (процесс измерения может сводиться к счету числа импульсов, приходящихся на единицу времени: измерение временных отрезков может быть выполнено в надлежащей точностью);
- временные интервалы между импульсами (процесс измерения может сводиться к определению временных промежутков между импульсами с последующей их обработкой согласно принятому алгоритму для данного конкретного случая) и т. п.
Сказанное предполагает либо создание специальных, неаналоговых, ОД, либо, что иногда возможно, использование некоторых типов аналоговых ОД в несвойственных им неаналоговых режимах, в результате чего на их выходах формируются оптические сигналы с периодической модуляцией того или иного параметра оптического излучения, которые, при соответствующем детектировании, могут быть преобразованы в импульсные электрические сигналы.
Примером практической реализации ОД первого типа являются вышерассмотренные растровые ЦОД. Точность измерений в этом случае определяется точностью изготовления модулирующих растров и, в принципе, может быть сколь угодно высокой. Очевидным достоинством ЦОД является простота получения результата измерения: недостатками - большие габариты модулирующих растров, которые тем больше, чем выше требуемая точность измерений: малый круг величин, которые могут быть измерены такими ОД (практически только угловые и линейные перемещения).
Гораздо более широкими функциональными возможностями обладают ОД, формирующие выходной сигнал в виде временной последовательности оптических импульсов. Применение в таких ОД специальных модуляторов с циклическими прерывателями потока излучения, чувствительными к воздействующим на ОД физическим величинам, позволяет создавать ОД для измерения различных физических величин (механических, электрических, магнитных, тепловых и т.п.).
Очевидно, формирование импульсных, неаналоговых, оптических сигналов во всех вышерассмотренных ОД и импульсное, неаналоговое, восприятие их последующими схемами обработки делает такие измерительные системы нечувствительными к любого рода нестабильностям параметров элементов, образующих оптический измерительный тракт (ИИ, ВС, ФП и пр.).
Обработка сигналов цифровых ОД осуществляется методами и средствами цифровой техники, что практически исключает возможность образования ошибки в устройствах обработки, а в случае микропроцессорной обработки позволяет проводить целенаправленную коррекцию сигналов ОД для нейтрализации влияния естественных недостатков и несовершенств ОД на результат осуществляемых с их помощью измерений. Это позволяет основную тяжесть интеллектуальной нагрузки в процессе измерений перенести с ОД на устройства обработки их сигналов, т. е., обладая столь мощным аппаратом обработки сигналов, можно снизить уровень требований, предъявляемых собственно к ОД, не снижая при этом требований к качеству измерений в целом. В таком случае требования к ОД могут быть смягчены: они могут быть проще конструктивно и в изготовлении, к ним могут быть снижены эксплуатационные требования и т.п.
Теоретически погрешность ИС с время-импульсными ОД ограничивается возможной точностью формирования временных промежутков между оптическими импульсами и последующей точностью их измерения.
Таким образом, совокупность существенных признаков предложенного технического решения позволяет решить проблему точности измерений, производимых посредством сопрягаемых с ВС ОД. Достигается это благодаря отказу от аналоговой модуляции и переходу от принципиально низкоточных измерений интенсивности маломощного потока оптического излучения к временным измерениям, которые могут быть выполнены с требуемой высокой точностью.
На фиг. 1 изображена конструкция заявляемого ВОД. На фиг. 2 изображен вид торца ВС с закрепленным на нем модулирующим растром. На фиг. 3 изображена функциональная схема возможного варианта акселерометра на основе предлагаемого ВОД. На фиг. 4 изображены временные диаграммы, поясняющие работу ВОД.
Заявляемый ВОД (см. фиг.1) содержит корпус 1 с закрепленным в нем консольно концом ВС 2. На свободном конце ВС 2 закреплена ИМ 3, выполненная из магнитомягкого материала в виде цилиндрика с осевым отверстием, которым она одевается на конец ВС 2 и обычно закрепляется так, что плоскость торца ВС 2 совпадает с плоскостью основания цилиндрика ИМ 3. На этом основании может располагаться растр 4 из чередующихся прозрачных и непрозрачных концентрических круговых полос (см. фиг. 2). Напротив торца ВС 2 в корпусе 1 жестко закреплено вогнутое зеркало 5, выполненное в виде двух цилиндрических поверхностей, взаимоперепендикулярные оси кривизны которых пересекаются с осью ВС 2 под прямыми углами над плоскостью среза зеркала 5. При этом свободный конец консоли ВС 2 закреплен в сквозном отверстии ИМ 3 так, что ее центр масс лежит на оси ВС 2, симметрично которой в корпусе 1 закреплены катушки индуктивности 6.
Модулирующий растр 4 (см. фиг. 2) может использоваться в случае, если консоль ВС 2 (см. фиг. 1) выполнена из многомодового ВС со сравнительно толстым световедущим сердечником, что обуславливает формирование широких оптических импульсов на выходе ВОД и снижает точность срабатывания старт-стопной схемы блока электронной обработки, а в конечном итоге и точность измерений в целом. Увеличить точность срабатывания старт-стопной схемы в этом случае можно путем уменьшения ширины генерируемых ВОД оптических импульсов, для чего и служит растр 4.
Корпус ВОД 1 может быть выполнен из немагнитного материала с низким коэффициентом термического расширения, обеспечивающего жесткую фиксацию закрепленных на нем элементов конструкции ВОД, например инвара.
В качестве ВС 2 может быть использован стандартный одно- или многомодовый ВС типа "кварц-кварц" с полиакрилатным защитно-упрочняющим покрытием.
В качестве материала магнитной массы 3 может быть использована, например, электротехническая сталь.
Модулирующий растр 4 может быть выполнен, например, путем фото-(электронно)литографии по пленке металла, например хрома, осажденного термическим испарением либо непосредственно на торец ВС, либо на тонкое прозрачное основание, например стекло, которое затем закрепляется на торце ВС.
Вогнутое зеркало 5 может быть выполнено либо стеклянным с последующей металлизацией (серебром или алюминием) отражающей поверхности, либо непосредственно в материале корпуса ВОД, также с последующим покрытием его металлом с высоким коэффициентом отражения. Радиус кривизны зеркальной поверхности может составлять от одного до нескольких миллиметров.
Катушки индуктивности 6 могут быть выполнены обычным намоточным проводом на немагнитном каркасе, например, цилиндрической формы.
Конструкция ВОД предполагает его работу в режимах с различными динамическими диапазонами восприятия величины измеряемого ускорения, что находит свое отражение в различных величинах радиусов вращения консоли ВС 2, как сферического маятника, при работе ВОД. Сообразно с этим в каждом конкретном случае необходимо установить длину консоли ВС 2 (см. фиг. 1) такой, чтобы именно для этого случая соблюдалось условие оптической юстировки торца ВС 2 относительно осей кривизны зеркала 5. При этом расстояние между торцом свободного конца консоли ВС 2 и зеркалом 5 устанавливается таким, чтобы круговое движение центра торца свободного конца консоли ВС 2 при работе ВОД в отсутствие ускорения осуществлялось в плоскости осей кривизны зеркала 5.
При юстировке устанавливается также и взаимное расположение центра массы ИМ 3 и катушек индуктивности 6. При этом катушки индуктивности 6 располагают так, чтобы их оси симметрии, параллельные осям кривизны зеркала 5, образовывали квадрат, по вписанной в который окружности двигался бы центр масс ИМ 3 при работе ВОД.
Работа предлагаемого ВОД обеспечивается в составе ВО акселерометра, возможный вариант функциональной блок-схемы которого изображен на фиг. 3. Кратно опишем функциональные связи блоков (см. фиг. 3). Непрерывный поток оптического излучения от ИИ 1 по ВС 2 поступает на Y-образный волоконно-оптический разветвитель (ВОР) 4, с выхода которого также по ВС 2 поступает на ВОД 6. Сформированные с ВОД 6 короткие импульсы оптического излучения по тому же ВС 2 опять поступают на ВОР 4, после прохождения которого по другому ВС 2 ответвляются на ФП 3. Электрические импульсы с выхода ФП 3 поступают в электронный блок 5 обработки сигналов ВОД 6. Блок 5 вырабатывает информационный сигнал, а также совместно с блоком 7 возбуждает и поддерживает круговое движение маятника в ВОД 6.
Работает предлагаемый ВОД следующим образом. В исходном состоянии (при включенном питании в отсутствие ускорения) к ВОД через ВОР по ВС 2 подводится непрерывный поток оптического излучения, генерируемый ИИ. Закрепленный в корпусе 1 консольно конец ВС 2 с ИМ 3 на его свободном конце представляет собой колебательную систему маятникового типа. При работе ВОД конец консоли ВС 2 совершает круговые движения в плоскости, задаваемой осями кривизны зеркала 5. Круговое движение маятника поддерживается силовым воздействием на ИМ 3 неоднородного маятникового поля, генерируемого катушками 6 при пропускании через них (поочередно) тока от блока управления 7 (см. фиг. 3). Размах (радиус) кругового движения конца консоли ВС 2 может составлять от одного до нескольких миллиметров.
Каждый раз при пересечении концом консоли ВС 2 осей кривизны зеркала 5, часть вышедшего из торца ВС 2 излучения после отражения от зеркала 5 возвращается обратно в ВС 2. Объясняется это правилами геометрической оптики, согласно которым при расположении предмета на двойном фокусном расстоянии от вогнутого сферического зеркала (или, что то же самое, на расстоянии, равном радиусу кривизны зеркала), в этой же плоскости формируется и его инверсное равновеликое изображение. В случае цилиндрического зеркала в принципе происходит все то же, только изображение будет растянутым вдоль оси зеркала до величины 2RtgΘ, где R - радиус кривизны зеркала, а Θ - апертурный угол ВС.
Таким образом, четырежды за каждый период движения (оборот) маятника, на выходе ВОД формируются короткие оптические импульсы. Очевидно, в отсутствие воздействия на ВОД ускорения, времена пребывания маятника по обе стороны от каждой из двух перпендикулярных оптических осей зеркала 5 будут одинаковыми и, соответственно, одинаковыми будут и длительности временных промежутков между соответствующим этим зеркалам оптическими импульсами, генерируемыми ВОД (см. фиг. 4а).
При действии на ВОД ускорения, вектор которого параллелен плоскости XOY (см. фиг. 1), положение равновесия маятника смещается (от исходного) на некоторую величину. Величина этого смещения определяется величинами действующего на ВОД ускорения, ИМ 3 и жесткостью консоли конца ВС 2. Благодаря указанному смещению положения равновесия маятника, времена пребывания его по обе стороны от каждой из оптических осей зеркала 5 теперь не будут одинаковыми. Это значит, что в каждой из двух последовательностей оптических импульсов (одна из которых соответствует одной части цилиндрического зеркала, параллельной, например, оси X, а вторая - второй части зеркала, параллельной оси Y), один из каждой пары соседних временных промежутков увеличит свою длительность, а другой - уменьшит (см. фиг. 4б). При этом суммарная длительность двух соседних временных промежутков в каждой из последовательностей (т. е. время полного оборота маятника) останется неизменной. Очевидно, чем большей (меньшей) будет величина воздействующего на ВОД ускорения, тем, соответственно, большей (меньшей) будет и разность длительностей между соседними временными промежутками, задаваемыми оптическими импульсами в каждой из их последовательностей.
Таким образом, разность длительностей двух соседних временных промежутков между импульсами в каждой из последовательностей на входе ФП может служить мерой величины проекций воздействующего на ВОД ускорения на каждую из двух осей чувствительности (OX и OY), задаваемых осями кривизны цилиндрических зеркал (при этом, естественно, соответствующие оси чувствительности перпендикулярны каждая "своей" части зеркала). Знак этой разности будет определять направление вектора ускорения (или его проекции) - согласно или против выбранного положительного направления оси чувствительности ВОД.
Для однозначного определения знака разности необходимо заранее знать, в ту или иную сторону от исходного смещается положение маятника при воздействии ускорения на ВОД. Эта задача решается определением знака силового воздействия на ИМ 3 со стороны схемы поддержания кругового движения маятника (пор направлению тока в катушках индуктивности 6).
При воздействии на ВОД ускорения, вектор которого направлен вдоль оси чувствительности OZ (перпендикулярной плоскости среза зеркала 5) положение равновесия маятника не изменится и, соответственно, увеличения (уменьшения) соседних временных отрезков относительно друг друга в рассматриваемых выше последовательностях импульсов не произойдет. Однако при этом изменится время (период) обращения маятника, т.е. информационным параметром в этом случае будет выступать не разность времен пребывания по обе стороны от соответствующих оптических осей зеркала, а само время обращения маятника.
При произвольной ориентации вектора ускорения, когда наличествуют его проекции на все три оси чувствительности ОД, изменятся все вышеперечисленные временные интервалы (см. фиг. 4в), что позволяет при соответствующей обработке определить величины и знаки всех трех проекций вектора ускорения.
Очевидно, полная величина вектора ускорения (его модуль и направление) определится как геометрическая сумма всех его проекций.
Высокая точность измерения ускорения посредством предлагаемого ВОД обеспечивается возможностью высокоточного измерения временных промежутков между соответствующими оптическими импульсами, а также возможностью создания высокодобротной колебательной маятниковой системы (что в нашем случае обеспечивается использованием в качестве упругого подвеса ИМ консоли из кварцевого ВС). Помимо этого, достижению высокой точности измерения способствует также независимость метрологических параметров ВОД от стабильности параметров оптических и электрических элементов, образующих измерительный оптический тракт ВОД и обеспечивающих его работоспособность, поскольку измеряемой величиной в выходном сигнале ВОД являются не энергетические параметры его оптических импульсов, а задаваемые с их помощью длительности временных интервалов.
Для формирования возможно меньшей длительности выходных оптических импульсов (для повышения точности срабатывания старт-стопной схемы измерения длительностей временных промежутков между оптическими импульсами) в качестве ВС 2 (см. фиг. 1) следует использовать одномодовые ВС, с диаметром световедущего сердечника ≈ 5-7 мкм. При использовании же в качестве ВС 2 многомодовых ВС, для укорочения длительности выходных оптических импульсов на торцах ВС можно закрепить модулирующие растры из чередующихся прозрачных и непрозрачных концентрических круговых полос (см. фиг. 2).
Дадим оценку метрологическим возможностям предлагаемого ВОД как измерительного преобразования для построения акселерометра.
Для упрощения рассмотрение проведем при следующих возможных случаях ориентации вектора ускорения:
1. Вектор ускорения параллелен плоскости XOY и одной из осей чувствительности (например, Y);
2. Вектор ускорения параллелен плоскости XOY и ориентирован произвольно осей чувствительности X и Y;
3. Вектор ускорения параллелен оси чувствительности Z;
4. Вектор ускорения ориентирован произвольно по отношению к осям чувствительности ВОД.
Случай N 1.
При изменении величины ускорения будут изменяться длительности соседних временных промежутков в последовательности импульсов, отражаемых частью зеркала перпендикулярной оси чувствительности OY. В последовательности импульсов, отражаемых второй частью зеркала, временные промежутки изменяться не будут. Другими словами, нулевой результат будет получен только в одном канале, определяющем ускорение, вектор которого направлен вдоль оси OY (в "Y"-канале).
Пороговая чувствительность. Смещение свободного конца консоли ВС 2 от исходного положения равновесия (в отсутствие ускорения) под действием на ВОД ускорения a, можно определить из выражения [4]:
где - M - инертная масса на свободном конце консоли ВС, кг; L - длина консоли, м; E - модуль Юнга для материала консоли, H/м2; I - момент инерции поперечного сечения консоли, м4.
С другой стороны, проекция кругового движения конца маятника на ось чувствительности OX описывается выражением:
x = Rsinωt, (2)
где R - радиус обращения конца маятника, м; ω = 2πF - угловая частота, рад/с; F = 1/T - линейная частота, 1/с; T - время оборота маятника, с.
Исходя из того, что пороговое смещение консоли Xпор, под действием на ВОД пороговой величины ускорения апор, хпор < R, из выражения (1) запишем выражение для Δtпор:
Очевидно, ΔTпор = 4Δtпор = 1/fген - условие регистрации порогового значения a.
Здесь ΔTпор - разность длительностей временных интервалов положительного и отрицательного полукругов обращения маятника при смещении его положения равновесия под действием aпор на величину Δxпор; fген - частота стабилизированного генератора высокой частоты, длительность периода колебаний которого используется в качестве меры при измерении длительностей временных отрезков между оптическими импульсами на выходе ВОД.
Собственная (резонансная) частота вращательного движения маятника [5]:
Из уравнений (1-4) выразим пороговую величину ускорения, которая может быть зарегистрирована предлагаемым ВОД:
Оценку апор проведем для следующих значений входящих в (5) величин (консоль считаем кварцевым стержнем с размерами L • d = 50 • 0,125 мм2); E = 7 • 1010 H/м2; I = πd4/64 = 1,2•10-17 м4; R = 2 • 10-3 м; m = 10-2 кг; L = 5 • 10-2 м; fген = 5 • 107 Гц.
Подставив указанные значения в выражение (5), получим:
aпор = 5,6 • 10-8 м/с2 = 5,7 • 10-9 g. (6)
Максимальная величина amax, которая может быть измерена предлагаемым ВОД, очевидно, может быть определена из условия:
Динамический диапазон измеряемых посредством предлагаемого ВОД ускорений:
Очевидно, быстродействие ВОД будет определяться периодом обращения консоли:
Случай N 2.
Принципиального отличия этот случай от вышерассмотренного не имеет. В этом случае ненулевой результат будет получен в обоих каналах ( и в "X"-, и в "Y"-каналах). Очевидно, случай 2 можно интерпретировать как простое наложение двух случаев 1. Полная величина ускорения и его ориентация относительно осей чувствительности OX и OY будет определена в блоке обработки как геометрическая (векторная) сумма величин ускорений, полученных в "X"- и в "Y"-каналах.
Случай N 3.
Это случай принципиально отличен от двух вышерассмотренных. Когда вектор ускорения направлен вдоль оси Z, исходное положение равновесия маятника (в отсутствие воздействия на ВОД ускорения) не нарушается и, соответственно, в "X"- и в "Y"-каналах результат воздействия ускорения на ВОД не будет зафиксирован. В то же время произойдет общее изменение собственной (резонансной) частоты вращения маятника, т.е. теперь информационным параметром выступает не разность длительностей полупериодов (как в предыдущих случаях), а сама длительность периода обращения (время полного оборота) маятника, измерение которого осуществляется в третьем канале ("Z" - канале) блока обработки. Проведем оценку основных метрологических параметров ВОД для его третьей оси чувствительности, OZ.
Пороговая чувствительность. При воздействии на ВОД ускорения вдоль оси OZ, выражение для периода обращения маятника примет вид:
Очевидно, условие регистрации пороговой величины ускорения можно записать в виде:
Преобразуя (11) с учетом (1), (10) и пользуясь формулами приближенного вычисления, получим:
Подставляя численные значения входящих в (12) величин, получим:
aпор ≈ 7,2 • 10-7 м/с ≈ 7,3 • 10-8 g.
В качестве максимальной величины ускорения аmax, которая может быть измерена предлагаемым ВОД, примем такую ее величину, при которой период обращения маятника увеличится (уменьшится), например, вдвое (это условие, очевидно, не жесткое). Из этого условия:
Динамический диапазон измеряемых ускорений в этом случае составит:
N = 4 • 106. (14)
Быстродействие ВОД, как и прежде, будет определяться периодом обращения консоли.
Случай N 4.
Это наиболее общий случай - ненулевой результат будет получен во всех трех каналах ("X", "Y" и "Z"). Результирующая величина полного вектора ускорения и его ориентация относительно осей чувствительности будет определена в блоке обработки как геометрическая сумма всех трех составляющих. Очевидно, появление составляющей вектора ускорения, направленной вдоль оси OZ, вызовет изменения чувствительности ВОД вдоль осей OX и OY и, соответственно, вызовет изменения и в отсчетах каналов "X" и "Y" даже при неизменных величинах составляющих вектора ускорения вдоль этих осей. Из сказанного следует, что блок обработки должен корректировать масштабные коэффициенты, соответствующие осям OX и OY, сообразно величине составляющей вектора ускорения вдоль оси OZ.
Как следует из приведенных выражений, целенаправленным изменением конструктивных параметров ВОД, а также измерительной частоты fген можно в широких пределах изменять основные метрологические параметры ВОД-акселерометра.
Возможности использования предлагаемого ВОД дополнительно могут быть расширены путем электронной обработки его сигналов. Так, например, интегрируя по времени результаты измерений ускорения, легко осуществить высокоточное измерение относительной скорости объекта, несущего ВОД или же (путем двойного интегрирования) его пространственное перемещение, т.е. создавать высокоточные системы навигации (ориентации в пространстве) для автономных (не связанных с какими-либо внешними ориентирами) подвижных средств (подводные лодки, ракеты дальнего радиуса действия с самонаведением, космические летательные аппараты и т.п.).
Литература
1. Soref R., McMahon D.H. Tilting-mirror Fiber Optic Acceleroment // Appl. Opt., 1984, v. 23, p. 486-491.
2. Заявка ЕПВ N 0251048, G 01 P 15/08, 1988.
3. П. А. Демьяненко. "Предельные возможности аналогичных волоконно-оптических датчиков в составе ВОС". - Радиотехника, 1988 N 2, с. 88-90.
3. С.П.Тимошенко, Дж. Гудьер. Теория упругости. Пер. с анг./ Под ред. Г. С.Шапиро. - 2-е изд. - М.: Наука. Главная редакция физико-математической литературы, 1979, с. 62.
5. С.П.Тимошенко. Колебания в инженерном деле. - М.: Физматгиз, 1959, с. 251.
| название | год | авторы | номер документа |
|---|---|---|---|
| Волоконно-оптический преобразователь | 1988 |
|
SU1620820A1 |
| ОПТИЧЕСКИЙ ГИРОСКОП С ПАССИВНЫМ КОЛЬЦЕВЫМ РЕЗОНАТОРОМ | 1997 |
|
RU2124185C1 |
| Волоконно-оптический уплотнитель-разделитель мод | 1985 |
|
SU1280556A1 |
| Многоточечный волоконно-оптический датчик параметров жидких сред | 1988 |
|
SU1728664A1 |
| Лазерный космический гравитационный градиентометр | 2021 |
|
RU2754098C1 |
| МИКРОРЕЗОНАТОРНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ЭЛЕКТРИЧЕСКОГО ТОКА | 1999 |
|
RU2170439C1 |
| МИКРОРЕЗОНАТОРНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК МАГНИТНЫХ ПОЛЕЙ | 2001 |
|
RU2202115C2 |
| Способ измерения углов,образуемых тремя гранями призмы,и устройство для его осуществления | 1985 |
|
SU1250848A1 |
| МИКРОРЕЗОНАТОРНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК МАГНИТНЫХ ПОЛЕЙ | 1999 |
|
RU2157512C1 |
| Волоконно-оптический преобразователь | 1988 |
|
SU1626090A1 |
Датчик предназначен для использования в технике высокоточных измерений посредством сопрягаемых с волоконными световодами оптических датчиков, в том числе и волоконно-оптических, чувствительные элементы которых выполнены на основе волоконных световодов. Датчик может служить основой построения трехкоординатного прецизионного цифрового волоконно-оптического акселерометра для измерения линейных ускорений, в том числе и сверхмалых, в широком динамическом диапазоне. В корпусе датчика закреплен отражатель. Конец волоконного световода консольно закреплен в корпусе. Инерционная масса закреплена на свободном конце консоли волоконного световода, размещенного в выполненном в инерционной массе сквозном отверстии. Торец свободного конца консоли волоконного световода расположен над отражателем. Катушки индуктивности установлены в корпусе симметрично оси волоконного световода. Отражатель выполнен в виде вогнутого зеркала, образованного двумя цилиндрическими поверхностями. Оси цилиндрических поверхностей взаимно перпендикулярны и пересекаются с осью волоконного световода под прямыми углами над плоскостью среза вогнутого зеркала. Центр масс инерционной массы, выполненной из магнитного материала, лежит на оси волоконного световода. 4 ил.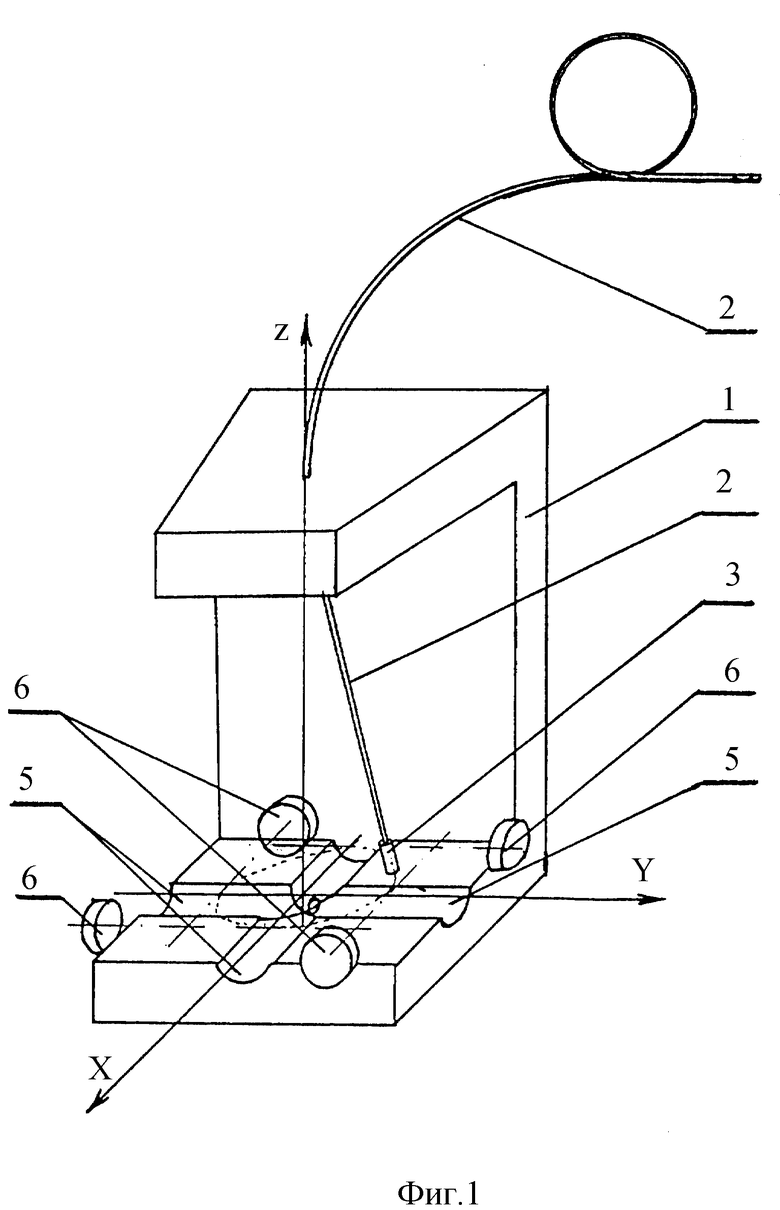
Волоконно-оптический датчик ускорения, содержащий корпус с закрепленным в нем отражателем, волоконный световод, конец которого консольно закреплен в корпусе, инерционную массу, закрепленную на свободном конце консоли волоконного световода, размещенном в выполненном в инерционной массе сквозном отверстии, причем торец свободного конца консоли волоконного световода расположен над отражателем, отличающийся тем, что введены катушки индуктивности, установленные в корпусе симметрично оси волоконного световода, отражатель выполнен в виде вогнутого зеркала, образованного двумя цилиндрическими поверхностями, при этом оси цилиндрических поверхностей взаимно перпендикулярны и пересекаются с осью волоконного световода под прямыми углами над плоскостью среза вогнутого зеркала, а центр масс инерционной массы, выполненной из магнитомягкого материала, лежит на оси волоконного световода.
| SU, авторское свидетельство 1534408, G 01 P 15/08, 1990 | |||
| US, патент 4829821, G 01 P 15/08, 1989 | |||
| DE, заявка 3140584, G 01 P 15/08, 1982 | |||
| SU, авторское свидетельство 794545, G 01 P 15/08, 1981 | |||
| EP, патент 0251048, G 01 P 15/08, 1988. |
