Изобретение относится к космической технике, преимущественно к орбитальным тросовым системам. Орбитальная тросовая система в простейшем виде представляет собой тросовую связку двух космических аппаратов, совершающую орбитальный полет. Развертывание такой связки на орбите осуществляется путем расстыковки первоначально соединенных аппаратов с последующим выпуском связывающего их троса с помощью специальных устройств, установленных на их борту. Такие устройства могут быть снабжены системой управления для обеспечения регулирования процесса выпуска троса.
Известны устройства выпуска троса связки двух космических аппаратов, выполненные в виде невращающихся ("безынерционных") катушек, которые использовались, в частности, в космических экспериментах серии SEDS [1,2], причем катушка для эксперимента SEDS-2 [2] была снабжена системой управления. Такие катушки могут использоваться только для выпуска тросов с относительно небольшим натяжением.
Известны также устройства выпуска троса связки двух космических аппаратов, выполненные в виде лебедок, содержащих вращающийся барабан с тросом и автоматизированным электроприводом. В частности, в [3] описано устройство, устанавливаемое на основном спутнике и предназначенное для отведения на тросе привязного субспутника. Это устройство содержит ферму с механизмом ее выдвижения, на конце которой установлен закрепленный на конце троса привязной субспутник, а в основании которой расположена лебедка для выпуска троса. Лебедка содержит вращающийся барабан с тросом, электродвигатель с системой управления, датчики текущей длины, скорости выпуска и силы натяжения выпускаемого троса, направляющие ролики. Одним из недостатков этого устройства является отсутствие элементов, обеспечивающих возможность фиксации барабана в транспортном положении лебедки или отрезания троса в нештатной ситуации.
Наиболее близким аналогом заявляемого устройства выпуска троса является устройство, описание которого имеется в [4]. Это устройство (Deployer) устанавливалось в грузовом отсеке кораблей "Спейс Шаттл" и использовалось при отведении на тросе привязного спутника в космических экспериментах TSS-1 и TSS-1R. Устройство содержит вращающийся барабан с тросом, электродвигатель с системой управления, арретир для фиксации барабана и два механизма управления выпуском троса, расположенные в основании и на конце выдвижной фермы. Механизмы управления выпуском троса содержат направляющие ролики, датчики длины и натяжения выпускаемого троса и резаки для его отрезания.
Устройство выпуска троса, принятое в качестве прототипа, имеет следующие недостатки. Это устройство не может быть размещено в рабочем положении внутри герметичного отсека одного из космических аппаратов без нарушения его герметичности (в экспериментах TSS оно размещалось в открытом грузовом отсеке корабля "Спейс Шаттл" на специальной платформе). Конец троса жестко связан с другим космическим аппаратом, что не позволяет выводить на орбиту раздельно каждый аппарат связки и затем стыковать их друг с другом, а также отцеплять трос в случае необходимости (в эксперименте TSS-1R привязной спутник выводился на орбиту на борту корабля вместе с устройством выпуска троса, а после нештатного обрыва троса он летал вместе с привязным спутником и не мог быть отцеплен от него). Представляется слишком сложным решением использование выдвижной фермы для выполнения начального этапа разведения космических аппаратов на тросе до их захвата гравитационно-центробежными силами. Наличие только одного электродвигателя исключает возможность его дублирования в случае отказа, что снижает надежность работы устройства.
Известны системы управления для устройств выпуска троса, выполненных в виде невращающихся катушек. В частности, в космическом эксперименте SEDS-2 [2] использовалась замкнутая система, содержащая датчики длины и натяжения выпущенной части троса, блок формирования параметров управления выпуском троса и фрикционный тормоз с электроприводом. В этой системе сигнал с датчика длины троса поступает в блок формирования параметров управления, который сравнивает измеряемое значение длины троса с ее программно-задаваемой величиной, и по ее отклонению формирует и выдает управляющий сигнал для электропривода. В соответствии с этим сигналом электропривод отрабатывает регулируемое тормозящее воздействие фрикционного тормоза на выпускаемый трос, осуществляя, таким образом, управление его выпуском.
Регулируемое торможение выпуска троса путем непосредственного воздействия на него силами трения возможно лишь при малых силах натяжения и скоростях выпуска. Торможение таким способом сильно натянутых и быстро выпускаемых тросов приводит к выделению большого количества тепловой энергии вo фрикционном тормозе и может вызвать повреждение и разрыв троса.
Известны также системы управления для устройств выпуска троса, выполненных в виде лебедок с вращающимся барабаном. В частности, в [3] описана система управления, содержащая датчики текущей длины, скорости выпуска и силы натяжения троса, а также блоки формирования параметров управления выпуском троса. Информация с датчиков поступает в блоки формирования параметров управления, где в соответствии с заложенной программой в зависимости от измеренных величин длины и скорости выпуска троса вычисляется заданное значение силы его натяжения, которое сравнивается с ее измеренной величиной, и по этому отклонению формируется управляющий сигнал на электродвигатель. Однако в этом описании не раскрывается, что собой представляет этот управляющий сигнал и каким образом электродвигатель осуществляет поддержание заданной силы натяжения выпускаемого троса.
Наиболее близким аналогом заявляемой системы управления является система, описание которой имеется в [4]. Эта система входила в состав устройства выпуска троса, использовавшегося в экспериментах TSS-1 и TSS-1R. Система содержит датчики длины, скорости и натяжения троса, блоки формирования параметров управления выпуском троса, коммутирующие элементы и резисторы. Информация с датчиков поступает в блоки формирования параметров управления, в которых измеряемые величины сравниваются с их программно-задаваемыми значениями, и по их отклонениям формируются и выдаются управляющие сигналы на коммутирующие элементы. В соответствии с этими сигналами коммутирующие элементы, выполненные в виде силовых электронных ключей, осуществляют широтно-импульсную модуляцию электрического тока в обмотках электродвигателя, изменяя тем самым вращающий момент, создаваемый электродвигателем на барабане. При выпуске троса электродвигатель может работать главным образом в генераторном режиме, при этом вырабатываемая электроэнергия преобразуется в подключенных к электродвигателю резисторах в тепловую энергию и рассеивается путем излучения во внешнее пространство.
Система управления, принятая в качестве прототипа, имеет следующие недостатки. Коммутирующие элементы, выполненные в виде силовых электронных ключей, потребляют слишком много электроэнергии от бортовой сети, при этом в приборах системы управления выделяется слишком много тепловой энергии, что требует применения активных способов терморегулирования (в экспериментах серии TSS для этого использовались охлаждающие термоплаты). В контуре автоматического регулирования используются датчики, осуществляющие контактное измерение длины, скорости выпуска и силы натяжения выпускаемого троса, что вызывает необходимость пропускания троса через контактные ролики этих датчиков и сопряжено с опасностью запутывания или заедания троса в роликовом тракте, а при выпуске электропроводного троса - повреждения его изоляции с коротким замыканием, что наблюдалось в эксперименте TSS-1. Даже кратковременный отказ или обесточивание приборов системы управления может привести к серьезному нарушению или полному прекращению процесса выпуска троса.
Техническим результатом настоящего изобретения является:
обеспечение возможности раздельного выведения двух космических аппаратов связки на орбиту с их последующей стыковкой и развертыванием связки;
обеспечение удобства размещения устройства выпуска троса в рабочем положении на борту одного из космических аппаратов внутри герметичного отсека, снабженного стыковочным агрегатом, без нарушения герметичности;
обеспечение удобства создания и возможности разделения связки путем временного закрепления конца троса в стыковочном агрегате второго космического аппарата и его оперативного отделения от аппарата;
обеспечение простоты выполнения начального этапа выпуска троса до надежного захвата космических аппаратов гравитационно-центробежными силами без использования выдвижной фермы;
повышение надежности работы устройства путем использования нескольких электродвигателей с возможностью их дублирования в случае отказов;
уменьшение потребления электроэнергии от бортовой сети и обеспечение пассивного сброса выделяющейся тепловой энергии без использования средств активного терморегулирования;
повышение надежности работы устройства путем использования бесконтактных датчиковых средств, уменьшающих опасность запутывания или заедания троса в роликах;
повышение надежности работы устройства путем перехода на резервный режим выпуска троса в случае отказа или обесточивания приборов системы управления.
Указанный технический результат достигается тем, что в устройство выпуска троса связки двух космических аппаратов, содержащее вращающийся барабан с тросом, электродвигатель, электрически связанный с системой управления, датчик натяжения, резак, арретир и направляющие ролики, введены дополнительные, по крайней мере один, электродвигатели, связанные через редуктор с вращающимся барабаном, при этом барабан заключен в герметичный корпус с выходным фланцем, на котором установлена безынерционная катушка, причем барабан в корпусе с безынерционной катушкой, датчиком натяжения, резаком, арретиром и направляющими роликами, электродвигателями, редуктором и система управления установлены на одном из космических аппаратов связки, а на другом космическом аппарате связки установлен стыковочный адаптер с узлом крепления свободного конца троса. В систему управления, содержащую блок формирования параметров управления выпуском троса и электрически связанные с его выходами коммутирующие элементы и резисторы, введены датчики количества оборотов и скорости вращения электродвигателей, электрически связанные с электродвигателями и с входом в блок формирования параметров управления выпуском троса, при этом N резисторов электрически связаны с электродвигателями непосредственно, а М резисторов - через коммутирующие элементы, выполненные в виде дистанционных переключателей, причем
N+M=nд•nф, а 100%/М ≤ ε,
где nд - количество электродвигателей;
nф - количество фаз обмоток каждого электродвигателя;
ε - допустимая относительная погрешность управления развертыванием, %.
На фиг. 1 изображена схема устройства выпуска троса связки двух космических аппаратов, где
3 - барабан;
4 - трос;
5 - редуктор;
6 - электродвигатели;
7 - система управления;
12 - безынерционная катушка;
13 - стыковочный адаптер;
14 - узел крепления свободного конца троса;
15, 16 - космические аппараты.
На фиг. 2 представлен вид А устройства выпуска троса связки двух космических аппаратов, где
1 - герметичный корпус;
2 - выходной фланец;
8 - арретир;
9 - датчик натяжения;
10 - резак;
11 - направляющие ролики.
На фиг. 3 изображена схема системы управления для этого устройства, где
3 - барабан;
4 - трос;
5 - редуктор;
6 - электродвигатели;
17, 18 - коммутирующие элементы;
19 - блок формирования параметров управления выпуском троса;
20 - датчики количества оборотов и скорости вращения электродвигателей;
21 - N резисторов;
22, 23 - М резисторов.
В состав устройства выпуска троса для развертывания тросовой связки двух космических аппаратов входят (фиг. 1, 2) герметичный корпус 1 с выходным фланцем 2, вращающийся барабан 3 с тросом 4, редуктор 5, электродвигатели 6, система управления 7, арретир 8, датчик натяжения 9, резак 10, направляющие ролики 11, безынерционная катушка 12, стыковочный адаптер 13 с узлом крепления свободного конца троса 14. В рабочем положении устройство выпуска троса размещается внутри герметичного отсека одного из космических аппаратов 15, при этом электродвигатели 6 электрически связаны с системой управления 7, а стыковочный адаптер 13 соединяется со стыковочным агрегатом второго космического аппарата 16, причем свободный конец троса 4 закреплен в узле крепления 14.
В состав системы управления для этого устройства входят (фиг. 3) коммутирующие элементы 17 и 18, выполненные в виде дистанционных переключателей, блок формирования параметров управления выпуском троса 19, датчики количества оборотов и скорости вращения электродвигателей 20, N резисторов 21 и М резисторов 22, 23. В рабочем положении устройства выпуска троса датчики количества оборотов и скорости вращения электродвигателей 20 электрически непосредственно связаны с электродвигателями 6, N резисторов 21 электрически связаны с электродвигателями 6 так же непосредственно, а М резисторов 22 и 23 электрически связаны с электродвигателями 6 через коммутирующие элементы 17 и 18. Датчики количества оборотов и скорости вращения электродвигателей 20 электрически связаны с входами блока формирования параметров управления выпуском троса 19, выходы которого электрически связаны с коммутирующими элементами 17 и 18.
Устройство выпуска троса с системой управления может доставляться на орбиту на борту одного из космических аппаратов связки 15, который после выведения пристыковывается к другому космическому аппарату связки 16. При этом устройство выпуска троса с системой управления может доставляться на орбиту внутри герметичного отсека космического аппарата 15 в транспортном компактном состоянии. Затем устройство выпуска троса с системой управления может быть приведено в рабочее положение, например экипажем одного из космических аппаратов 15 и 16, причем эта операция может быть выполнена в состыкованном положении космических аппаратов 15 и 16 без нарушения герметичности их отсеков и без выхода экипажа в открытый космос. Перед развертыванием тросовой связки арретир 8 расфиксируется, тем самым обеспечивается возможность вращения барабана 3.
В начале развертывания связки космические аппараты 15 и 16 расстыковываются, взаимно отталкиваются и расходятся под действием главным образом начального импульса расстыковки и, возможно, воздействий своих реактивных двигателей. При этом трос 4 выпускается из безынерционной катушки 12 с небольшим сопротивлением, тем самым обеспечивается начальный захват связки гравитационно-центробежными силами. После полного выпуска троса 4 из безынерционной катушки 12 начинается выпуск троса 4 с барабана 3, при этом вращение барабана 3 через редуктор 5 передается на роторы электродвигателей 6. На этой стадии развертывание связки происходит уже главным образом под действием гравитационно-центробежных сил, которые как бы принудительно вытягивают трос 4 из устройства его выпуска.
Электродвигатели 6 при этом работают в генераторном режиме, создавая тормозящий момент на барабане 3, при этом вырабатываемая ими электроэнергия переходит в тепловую энергию в N резисторах 21 и в М резисторах 22, 23 и сбрасывается в окружающую среду. Таким образом, устройство выпуска троса не требует электропитания электродвигателей 6 или по каким-либо другим силовым фидерам. Незначительное количество электроэнергии расходуется только по приборным фидерам на обеспечение работы системы управления, причем исполнение коммутирующих элементов 17 и 18 в виде дистанционных переключателей (а не в виде, например, электромагнитных реле или силовых электронных ключей) позволяет до минимума снизить количество потребляемой ими электроэнергии.
При выпуске троса 4 с барабана 3 в каждый момент времени некоторые фазы обмоток электродвигателей 6 замкнуты постоянно на N резисторах 21, другие же фазы обмоток электродвигателей 6 электрически связаны с М резисторами 22 и 23: одни из этих фаз обмоток электродвигателей 6 могут быть подключены к резисторам 22 через замкнутые коммутирующие элементы 17, а остальные фазы обмоток электродвигателей 6 могут быть отключены от резисторов 23 разомкнутыми коммутирующими элементами 18. Общее количество N + М резисторов 21, 22, 23 должно быть равно общему количеству фаз обмоток всех электродвигателей 6, то есть - при использовании однотипных электродвигателей 6 - произведению количества nд электродвигателей 6 на количество nф фаз обмоток каждого электродвигателя 6.
Величина тормозящего момента на барабане 3 зависит от количества фаз обмоток статоров электродвигателей 6, замкнутых в данный момент на резисторы 21 и 22 непосредственно или через коммутирующие элементы 17. Управление замыканием и размыканием отдельных коммутирующих элементов 17 и 18 осуществляется блоком формирования параметров управления выпуском троса 19 в зависимости от показаний датчиков количества оборотов и скорости вращения электродвигателей 20, измеряющих количество оборотов и скорость вращения роторов электродвигателей 6.
Измерение этих величин не требует непосредственного механического контакта датчиковых средств с выпускаемым тросом 4, вносящего возмущения в процесс его выпуска и способного вызвать его запутывание, заедание или повреждение в роликовых механизмах. В качестве датчиков количества оборотов и скорости вращения электродвигателей 20 могут использоваться известные измерительные устройства, определяющие количество оборотов и скорость вращения электродвигателей путем анализа переменного электрического напряжения и/или тока в обмотках их статоров. При этом частота напряжения или тока соответствует скорости вращения, а количество изменений их полярности - количеству выполненных оборотов электродвигателей.
Логика замыкания и размыкания отдельных коммутирующих элементов 17 и 18 определяется заложенной в блок формирования параметров управления выпуском троса 19 программной зависимостью количества замкнутых в данный момент коммутирующих элементов 17 от текущих значений скорости вращения и количества оборотов роторов электродвигателей 6, измеряемых датчиками количества оборотов и скорости вращения электродвигателей 20. Эта логика может быть аппаратурно реализована, например, с использованием программируемых микропроцессоров или других аналогичных электронных элементов, используемых в системах управления и в компьютерной технике.
Количество М резисторов 22 и 23, электрически связанных с электродвигателями 6 через коммутирующие элементы 17 и 18, определяет дискретность и тем самым точность управления выпуском троса. Чем больше М, тем выше будет точность управления, при этом обратная величина 100%/М не должна превышать допустимой относительной погрешности ε, выраженной в процентах. При достаточно большом количестве фаз обмоток электродвигателей 6, М резисторов 22 и 23 и коммутирующих элементов 17 и 18 соответствующим выбором закладываемой в блок формирования параметров управления выпуском троса 19 программы можно обеспечить достаточно точную реализацию практически любого заданного закона управления силой натяжения выпускаемого троса 4 в зависимости от длины его выпущенной части и скорости выпуска. Кроме того, можно реализовать различные законы управления скоростью выпуска троса 4 или углом отклонения связки от вертикали в зависимости от текущей длины троса 4.
В случае отказа или обесточивания блока формирования параметров управления выпуском троса 19, даже если все коммутирующие элементы 17 и 18 окажутся в разомкнутом состоянии, некоторые фазы обмоток статоров электродвигателей 6 все равно будут подключены к N резисторам 21. При этом электродвигатели, несмотря на отказ системы управления, будут создавать тормозящий момент на барабане 3, при этом выпуск троса 4 будет продолжаться в резервном, не полностью управляемом режиме.
Выпускаемый трос 4 с помощью направляющих роликов 11 пропускается через контактный ролик датчика натяжения 9 и рабочую область резака 10. Показания датчика натяжения 9 не используются в контуре управления выпуском троса 4, но могут передаваться по телеметрическим каналам. Выпуск троса 4 либо продолжается до его полного сматывания с барабана 3, либо прекращается принудительно путем фиксации арретира 8. В нештатной ситуации или после окончания функционирования тросовой связки она может быть разделена путем выброса стыковочного адаптера 13 из стыковочного агрегата космического аппарата 16 и/или отрезания троса 4 резаком 10 от космического аппарата 15.
Ниже приводятся рекомендации и расчетные зависимости для некоторых случаев выбора логики замыкания и размыкания коммутирующих элементов 17 и 18, управляемых блоком формирования параметров управления выпуском троса 19 в зависимости от показаний датчиков количества оборотов и скорости вращения электродвигателей 20.
При выпуске троса 4 создаваемый электродвигателями 6 на барабане 3 тормозящий момент можно определить по формуле
где М - тормозящий момент электродвигателей 6 на барабане 3;
К - количество замкнутых на резисторы 21 и 22 фаз обмоток статоров электродвигателей 6;
ω - угловая скорость вращения роторов электродвигателей 6;
n - передаточное число редуктора 5;
c - конструктивная постоянная одной фазы обмоток электродвигателей 6;
Rо - электрическое сопротивление одной фазы обмоток электродвигателей 6;
Rс - электрическое сопротивление одного резистора 21, 22, 23.
Для равномерной плотности намотки троса 4 на барабане 3 действительны следующие кинематические соотношения:
где r - текущий радиус намотки троса 4 на барабане 3;
rmax - максимальный радиус намотки троса 4 на барабане 3;
rmin - минимальный радиус намотки троса 4 на барабане 3;
l - длина выпущенной части троса 4;
λ - длина начального участка троса 4, укладываемого в безынерционной катушке 12;
k - количество выполненных оборотов роторов электродвигателей 6;
L - полная длина троса 4;
V - скорость выпуска троса 4.
В установившемся режиме работы электродвигателей 6 тормозящий момент электродвигателей 6 уравновешивает момент на барабане 3 от силы натяжения троса 4:
M=N•r, (3)
где N - сила натяжения троса 4.
Подставив (3) в (1) с учетом (2), получим общую зависимость силы натяжения выпускаемого троса 4 от его длины и скорости выпуска
В установившемся режиме развертывания связки сила натяжения троса 4 уравновешивает приведенную гравитационно-центробежную силу, действующую на связку, то есть без учета отклонений связки от местной вертикали под действием кориолисовых сил можно написать приближенное соотношение
где m1 - масса одного космического аппарата 15;
m2 - масса другого космического аппарата 16;
Ω - средняя угловая орбитальная скорость связки.
Подставив (4) в (5), получим дифференциальное уравнение, приближенно описывающее изменение длины выпущенной части троса 4 при развертывании связки
Если при развертывании тросовой связки требуется реализовать управление силой натяжения выпускаемого троса 4, близкое к заданному законом N*(l, V), то в соответствии с (4) необходимо заложить в блок формирования параметров управления выпуском троса 19 программную зависимость
где ceil - функция округления до ближайшего целого числа, а функции l(k) и V(k, ω) определяются формулами (2).
Если же при развертывании тросовой связки требуется реализовать управление скоростью выпуска троса 4, близкое к заданному законом V*(l), то в соответствии с (6) необходимо заложить в блок формирования параметров управления выпуском троса 19 программную зависимость
В случаях, когда при развертывании связки требуется управлять углом отклонения связки от местной вертикали Θ в соответствии с заданным законом  то есть по существу реализовать заданную траекторию относительного движения космических аппаратов 15 и 16, необходимо сначала определить эквивалентный закон управления силой натяжения троса
то есть по существу реализовать заданную траекторию относительного движения космических аппаратов 15 и 16, необходимо сначала определить эквивалентный закон управления силой натяжения троса
после чего задача сводится к рассмотренному выше случаю (7).
Таким образом, применение заявляемого устройства выпуска троса с заявляемой системой управления позволяет реализовать достаточно широкие классы управления развертыванием тросовой связки двух космических аппаратов.
Все узлы и приборы, входящие в состав заявляемого устройства выпуска троса связки двух космических аппаратов и системы управления для него, могут быть либо заимствованы в виде уже разработанных, изготавливаемых и применяемых изделий, либо разработаны вновь на основе имеющихся аналогов. Таким образом, промышленная реализация устройств по заявляемому изобретению не представляет особых проблем.
Список литературы
1. Carroll J.A. SEDS deployer design and flight performance. AIAA Paper N 93-4764, 1993.
2. Doty P., Rupp C., Smith H. First and second flights of the Small Expendable Deployer System // AIAA 1995 Space Programs and Technologies Conference, September 26-28, 1995 / Huntsville, Alabama, AIAA 95-4075.
3. Rupp С.С., Kissel R.R. Tetherline system for orbiting satellites. U. S. Patent N 4083520, April 11, 1978, Int. Cl. B 64 G 1/00, US Cl. 244/167; 244/161.
4. Cargo Systems Manual: Tethered Satellite System. Vol. 1 - Deployer, Basic. NASA, Lyndon B. Johnson Space Center, Houston, Texas, June 1995, JSC-27051:I.


Изобретение относится к космической технике, и в частности к орбитальным тросовым системам. Согласно изобретению устройство выпуска содержит барабан с тросом, электродвигатель и систему управления. Данная система включает датчик натяжения, резак, арретир и направляющие ролики. При этом в устройство введен по крайней мере один дополнительный электродвигатель, связанный с барабаном. Барабан заключен в герметичный корпус, на котором установлена безынерционная катушка. Барабан, катушка, элементы системы управления и электродвигатели установлены на одном из космических аппаратов связки, а на другом установлен стыковочный адаптер с узлом крепления свободного конца троса. В состав системы управления введены датчики количества оборотов и скорости вращения электродвигателей. При этом предусмотрено множество резисторов, часть которых электрически связана с электродвигателями непосредственно, а часть - через дистанционные переключатели. Изобретение направлено на повышение точности развертывания, надежности и удобства в эксплуатации тросовой системы на орбите. 2 с.п.ф-лы, 3 ил.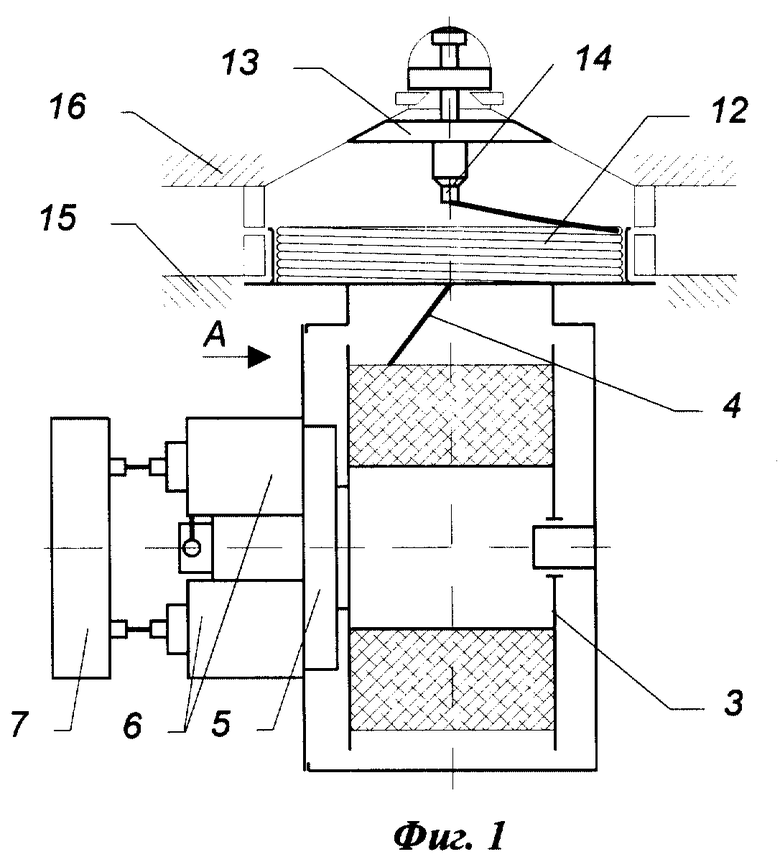
N + M = nдnф; 100%/M ≤ ε,
где nд - количество электродвигателей;
nф - количество фаз обмоток каждого электродвигателя;
ε - допустимая относительная погрешность управления развертыванием связки, %.
| Cargo System Manual: Tethered Satellite System | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| NASA, JSC, Houston, June 1995, JSC-27051:1 Итоги науки и техники | |||
| Ракетостроение и космич.техника | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Циркуль-угломер | 1920 |
|
SU1991A1 |
| US 4097010 A, 1981-02-06 | |||
| УСТРОЙСТВО ПАНОРАМНОГО ТЕЛЕВИЗИОННО-КОМПЬЮТЕРНОГО МОНИТОРИНГА | 2015 |
|
RU2592855C1 |
