Изобретение относится к области телевизионной техники, а именно к телевизионным системам, в которых формируется, передается и воспроизводится объемное изображение объектов, например, для телевизионного вещания, медицинской диагностики, конструирования деталей машин, компьютерных игр, создания театральных эффектов и т.д.
Объемное телевидение (ОТВ) осуществляется следующими основными этапами:
- наблюдение объекта с разных ракурсов совокупностью передающих камер, формирующих единое поле видеосигналов, отражающих трехмерное состояние наблюдаемой сцены (объекта);
- кодирование этого поля видеосигналов в форме, оптимальной для последующей передачи (или записи);
- передачу, прием и декодирование сформированных видеосигналов;
- преобразование принятой видеоинформации в оптические поля ракурсов, наблюдаемые зрителем.
На каждом из этих этапов имеют место специфические трудности и технические противоречия, в частности:
- на этапе наблюдения необходимо видеть объект под различными углами, чтобы обеспечить в последующем зрителю, наблюдающему объемное изображение, широкий угол видения объекта с сочетанием плавности его оглядывания по вертикали и по горизонтали;
- на этапах формирования и кодирования сигналов от многочисленных ракурсов необходимо представление этих сигналов в форме, совместимой со стандартными телевизионными сигналами (видеосигналами);
- на этапе передачи (или записи) сигналов ОТВ, содержащих информацию о многочисленных ракурсах, желательно использовать стандартный телевизионный канал и стандартную записывающую аппаратуру;
- на этапе воспроизведения объемного изображения необходимо обеспечить восприятие каждым из зрителей только той пары ракурсов в совокупности цветовой и яркостной информации, которая соответствует расположению зрителя перед воспроизводящим экраном.
Вся совокупность этих трудностей и технических противоречий сводится к тому, что система ОТВ должна обеспечивать в реальном времени кодирование, передачу и воспроизведение объема видеоинформации, значительно превышающего таковой для существующих телевизионных стандартов. Все это приводит к усложнению всех звеньев системы ОТВ:
- необходимости использования широкой полосы частот в трактах записи, передачи, и воспроизведения;
- использования кодирующих и декодирующих устройств с высокой производительностью;
- использования устройств отображения с высоким линейным разрешением и высокой геометрической точностью воспроизведения для получения изображения как максимально соответствующего наблюдаемому объекту, так и сознательно деформируемому для обеспечения театральных эффектов.
Отметим, что попытки решения проблем системы ОТВ по частям к успеху не приводят. Для создания системы ОТВ, пригодной для широкого использования, необходим подход интегральной, в целом, ко всем этапам одновременно, ибо эти части взаимосвязаны и взаимообусловлены.
Известны способы ОТВ, в которых формируется, передается и воспроизводится изображение объектов в виде стереопары, состоящей из правого и левого полей, попадающих, соответственно, в правый и левый глаза зрителей при помощи специальных стереоскопических очков [1,2]. Такое решение проблемы ОТВ, (главным образом, за счет этапов наблюдения, кодирования и воспроизведения) приводит к неудобству восприятия из-за необходимости использовать специальные средства - очки.
Известны способы ОТВ без использования стереоскопических очков, заключающиеся в том, что объект, изображение которого надо передать на расстояние, наблюдают из двух разных точек (ракурсов), разнесенных в горизонтальном направлении, и образуют две совокупности электрических сигналов (кадры, или поля стереопары); поля стереопары передают по каналу связи, а на воспроизводящем конце канала связи обеспечивают попадание левого и правого полей в соответствующие глаза зрителя, для чего учитывают азимутальные координаты глаз и дальность зрителя от экрана воспроизводящего устройства, которые определяют, например, методом оптической локации [3], ультразвукового зондирования [4] и иными методами [5].
Устройства воспроизведения системы ОТВ могут использовать воспроизводящий экран с обтюратором, выполненный, например, на основе жидко-кристаллической матрицы [6] , линзового растра [7], линзы "мушиный глаз" [8] или иным образом.
Решение проблемы ОТВ, (в основном, за счет этапов формирования и воспроизведения) приводит к недостатку, заключающему в том, что воспринимается лишь сформированная стереопара, без возможности воспроизведения объемного изображения для многих ракурсов, т.е. без возможности плавного оглядывания изображения зрителем. Общим недостатком всех этих способов [3-8] является низкое качество получаемого объемного изображения и несовместимость со стандартными телевизионными сигналами, что делает практически невозможным широкое бытовое использование названных способов.
Известен способ ОТВ, включающий наблюдение объекта совокупность передающих камер, число которых две и более, размещенных эквидистантно, формирование видеосигналов, содержащих информацию об объемном изображении, посредством тактирования и коммутации сигналов передающих камер, передачу и прием сформированных видеосигналов, преобразование принятых видеосигналов в оптическое изображение с учетом координат зрителя относительно центра экрана [9, прототип]. Конкретно, известное решение заключается в том, что:
- наблюдаемый объект рассматривают с разных точек зрения (ракурсов), число которых два и более, посредством передающих камер, расположенных эквидистантно с постоянной конвергенцией оптических осей соседних передающих камер;
- на этапе формирования образуют две совокупности тактированных видеосигналов, соответствующие двум выбранным ракурсам, а выбор их задается сигналами устройства, определяющего положение глаз зрителя;
- в канал связи передают только указанные две совокупности тактированных видеосигналов, соответствующих выбранным ракурсам;
- на этапе воспроизведения формируют два оптических изображения, в которых каждый элемент (пиксель) смещен по горизонтали экрана на величину, связанную с глубиной его положения в изображении, и осуществляют распределение световой информации в направлении глаз зрителя.
В способе [9], можно считать, наметился правильный подход к комплексному решению проблемы ОТВ, однако в нем еще четко не сформулированы основные требования к системе ОТВ, что, по-видимому, и привело к созданию системы, обладающей низкими потребительскими качествами, в частности:
- система ОТВ, использующая способ [9] не может работать в режиме записи, так как она использует координаты участника системы ОТВ - конкретного зрителя, вводимые в систему на этапе формирования передаваемого видеоизображения;
- система ОТВ, использующая способ [9] позволяет воспроизводить только те поля ракурсов, которым соответствуют направления оптических осей передающих камер, поскольку на этапе воспроизведения никакой обработки видеосигналов не производится;
- требование плавности оглядывания изображения в широком угле обзора приводит к необходимости использования большого числа передающих камер (1000 и более передающих камер), что значительно усложняет и удорожает систему; поэтому представляется целесообразным использовать не более 2 - 3 десятков передающих камер;
- увеличение числа зрителей требует пропорционального изменения полосы пропускания тракта передачи системы и усложняет приемные устройства.
Таким образом, технические решения типа [9] имеют высокую стоимость передающих и приемных устройств и обладают высоким качеством объемного изображения, обусловленного тем, что общее число ракурсов наблюдения и воспроизведения мало, практически не более 20.
Техническим результатом предложенного решения является достижимость свойственного человеку восприятия объемного изображения с возможностью оглядывания объекта в широком (около стерадиана) угле обзора, при плановом оглядывании (с небольшим отличием углов ракурсов, например, 10 угловых минут как по вертикальному, так и по азимутальному измерениям) при отсутствии искажения пропорций и перспективы в изображении наблюдаемого объекта.
Техническим результатом предложенного решения является также обеспечение возможности передачи объемных изображений по обычным моноскопическим телевизионным каналам и каналам связи (например, по каналу, удовлетворяющему стандартам PAL, SECAM, NTSC).
Техническим результатом предложенного решения является также возможность совмещения сформированных сигналов объемного изображения со стандартными сигналами телевизионного вещания (например, с сигналами как в существующих стандартах PAL, SECAM, NTSC).
Техническим результатом предложенного решения является также возможность управления объемным изображением и получения специфических эффектов (наплыв, удаление, регулирование размеров наблюдаемого изображения объекта, различных для разных осей координат и др.), что необходимо для решения задач конструирования, театральных эффектов, а в будущем может обеспечить потенциальную возможность создания интерактивных устройств ОТВ.
Техническим результатом предложенного решения является также возможность записи изображения наблюдаемого объекта независимо от координат и количества будущих зрителей при воспроизведении записанной информации. В частности, для записи объемного изображения возможно использование стандартной записывающей аппаратуры.
Указанный технический результат предложенного решения достигается за счет того, что принципиально по новому осуществляются все четыре этапа: наблюдение, формирование, передача (запись) и воспроизведение объемного изображения.
Технический результат предложенного решения достигается:
- особым размещением передающих камер при наблюдении ракурсов,
- получением специфической структуры тактированных видеосигналов в виде единого базового кадра, в котором учитывается расположение элементов наблюдаемого объекта в пространстве;
- передачей по телекоммуникационным цепям (и записью на носитель) только базового кадра;
- особым воспроизведением изображения, когда положение воспроизводимых пикселей определяется как записанными пространственными координатами элемента в базовом кадре, так и положением глаз зрителя.
А конкретно:
- наблюдение объекта осуществляют группами передающих камер, расположенных с учетом параметров телевизионного сигнала и последующих возможных положений зрителя;
- на этапе формирования формируют базовый кадр, отражающий пространственное расположение элементов наблюдаемого объекта и представляющий собой совокупность тактированных сигналов, состоящих из адресной и информационной частей, где:
- информационная часть отражает яркость и цветность элементов наблюдаемого сигнала;
- адресная часть - порядок следования сигналов в базовом кадре; при этом в адресную часть вводят сигнал о дальности элемента объекта, для чего:
- последовательно, в заданном порядке и на заданный интервал времени периодически, с периодами как кадровой, так и строчной разверток, включают группы передающих камер;
- в каждой группе передающих камер одну из них принимают за основную, а остальные - за дополнительные; во время работы данной группы передающих камер видеосигналы основной передающей камеры задерживают на различные интервалы времени, кратные длительности такта;
- такт задержки равен длительности сигнала, описывающего элемент объекта;
- видеосигналы дополнительных передающих камер, в группе попарно сравнивают с задержанными видеосигналами основной передающей камеры;
- определяют дальность, как параметр, связанный с номером такта задержки видеосигналов основной передающей камеры, на котором произошло совпадение сравниваемых сигналов;
- добавляют сигналы дальности к видеосигналам основной передающей камеры, причем определенной группе сигналов основной передающей камеры присваивается одинаковая дальность;
- передачу сигналов ОТВ сводят к передаче сигналов базового кадра;
- при воспроизведении для каждого зрачка зрителя преобразуют только адресную часть сигналов базового кадра, учитывая при этом положение каждого зрителя и сигналы дальности группы элементов базового кадра;
- оптические изображения соответствующих ракурсов объекта формируют в направлении зрачков каждого зрителя.
Формулировку технического решения, приведенного выше в обобщенном виде, целесообразно детализировать на ряд конкретных направлений.
В первую очередь такую детализацию проведем по отношению к этапу наблюдения, где размещение передающих камер в пространстве желательно связать с периодичностью их включения.
Наиболее оптимально установить такую связь в следующем варианте:
- элементарные телесные углы, соответствующие различным элементам объекта, воспринимаемым каждой из передающих камер, одинаковы;
- передающие камеры находятся на одинаковом расстоянии от центральной точки A, выбранной в пространстве наблюдаемого объекта (сцены);
- входные зрачки всех передающих камер располагают на сферической поверхности с центром в точке A, на линиях, подобных направлению строчной развертки передающих камер; в частности, при линейной строчной развертке оптические оси части групп передающих камер располагают в центральной плоскости, содержащей точку A и направлены в эту точку; их входные зрачки располагают на окружности с центром в точке A;
- передающие камеры располагают группами, число передающих камер в группе выбирают равным 2 или 3, одна из передающих камер - основная, остальные - дополнительные, при этом:
- одну из групп передающих камер, расположенную в центральной плоскости, назовем базовой группой, все остальные группы передающих камер назовем группами ракурсов;
- входные зрачки групп ракурсов передающих камер располагают как в центральной плоскости, так и на основании конусов с вершиной в точке A, образованных сечением сферической поверхности с центром в точке A плоскостями, параллельными центральной плоскости;
- оптические оси передающих камер в одной группе располагают на одной конической поверхности с постоянным наклоном к центральной плоскости и направляют их в точку A; (при небольших углах наклона, конические поверхности можно заменить на наклонные плоскости),
- группы передающих камер располагают на определенных конических поверхностях (плоскостях), образующая которых имеет индивидуальный наклон к центральной плоскости;
- строчные и кадровые развертки передающих камер синхронизированы между собой;
- моменты старта строчных и кадровых разверток всех передающих камер внутри одной группы совпадают во времени;
- последовательность сигналов передающих камер, в том числе обе развертки (строчная и кадровая) в разных группах осуществляют с заданной относительной задержкой, зависящей от пространственного расположения этих групп.
- кроме того, должны быть выполнены следующие условия:
δ = D/L = B/Lo; (1)
а) при небольших углах оглядывания, значительно меньших поля зрения основной передающей камеры базовой группы, когда для передачи сигналов ОТВ используется стандартный телевизионный канал:
(Σεi)/θ ≤ Tcк/Tрк; (2)
(Σβi)/ϕ ≤ Tнc/Tpc; (3)
б) при больших углах оглядывания, соизмеримых с полем видения основной передающей камеры базовой группы, когда для передачи сигналов ОТВ используется дополнительный телевизионный канал:
(Σεi)/θ ≤ (Tк/Tcл)/Tpк; (4)
(Σβi)/ϕ ≤ (Tc/Tcc)/Tpc; (5)
где δ - угол между оптическими осями соседних передающих камер в группе (конвергенция), рад;
Σεi - угол оглядывания изображения зрителем по вертикали, рад,
εi - угол в азимутальном измерении между основными передающими камерами, в соседних группах, рад;
Σβi - угол оглядывания изображения зрителем по азимуту, рад;
βi - угол в вертикальном измерении между основными передающими камерами в соседних группах, рад;
θ - угол, под которым основная передающая камера базовой группы видит объект по вертикали, рад,
ϕ - угол, под которым основная передающая камера базовой группы видит объект по азимуту, рад,
B - расстояние между глазами зрителя, м;
D - расстояние между основной и дополнительными передающими камерами, м;
L - расстояние от передающих камер до точки A, выбранной, как указано ранее, в пространстве наблюдения объекта, м;
L0 - заданное стандартное расстояние от центра воспроизводящего экрана до базовой точки 0, выбранной в зоне наблюдения объемного изображения, м;
Tрс- часть периода строчной развертки, занятая воспроизводством видеоинформации, с;
Tнс - часть периода строчной развертки, не занятая воспроизводством видеоинформации и служебными сигналами, с;
Tрк - часть периода кадровой развертки, занятая под воспроизводство видеоинформации в стандартном телевизионном кадре, с;
Tск - часть периода кадровой развертки, свободная от воспроизводства видеоинформации и передачи служебных сигналов в стандартном телевизионном кадре, с;
Tсл - часть периода кадровой развертки, занятая служебными сигналами, с;
Tсс - часть периода строчной развертки, занятая служебными сигналами, с;
Tк - период кадровой развертки, с;
Tс - период строчной развертки, с;
Выражение 1 описывает пространственные соотношения в системе ОТВ при правильной передаче продольной и двух поперечных пропорций наблюдаемого объекта в соответствующие пропорции объемного изображения. При этом поверхность воспроизводящего экрана выполняет роль поверхности, в которой находится точка A при наблюдении объекта; все точки объекта, лежащие между передающими камерами и поверхностью, содержащей точку A, при воспроизведении объемного изображения воспринимаются зрителем, как точки, выступающие из воспроизводящего экрана, а все точки за этой поверхностью воспринимаются как лежащие за экраном.
Для правильной работы системы ОТВ выражение 1 необходимо использовать совместно с выражениями 2 и 3 при малых углах оглядывания и совместно с выражениями 4 и 5 при больших углах оглядывания. Выражения 2 - 5 определяют цикличность включения групп передающих камер. В выражениях 2 - 5 знак ≤ (меньше или равно) указывает условие обеспечения плавности оглядывания зрителем объемного изображения. Если нарушить эти соотношения, то появятся скачки ракурсов при оглядывании, из-за несоответствия угла оглядывания группами ракурсов и времени, которое отведено в телевизионном кадре на передачу информации о дополнительных ракурсах, проявляющихся в углах оглядывания Σεi и Σβi. В частном случае, при Σεi = Σβi = 0 в выражениях 2 и 3 (работает лишь одна базовая группа передающих камер) оглядывания не будет ни по азимуту, ни по вертикали.
При расчетах целесообразно использовать величину B, усредненную для всех зрителей как 64•10-3 м = 26 мм, что с одной стороны, близко к средней величине расстояния между глаз человека (В=65 мм), а с другой стороны, удобно для всех вычислений в двоичном коде; конкретизация величины B для реального зрителя не внесет существенного уточнения и улучшения способа.
Соотношения 1-3 пригодны для любого телевизионного стандарта. При переходе от одного стандарта к другому изменятся лишь конкретные величины Tск, Tрк, Tнс и Tрс, соответствующие примененному стандарту. При этом достижимые углы оглядывания объемного изображения не могут быть произвольно широкими. Если, например, угол видения основной камеры базовой группы составляет 60o по азимуту и по вертикали, и время, свободное от передачи видеоинформации стандартным телевизионным сигналом занимает 10% от периода строки и 10% от периода кадра, то угол оглядывания не превысит 6o как по азимуту, так и по вертикали. Однако этого вполне достаточно, чтобы зритель, находясь в комфортных условиях, например, сидя перед телевизором объемного изображения, смог, при наклонах корпуса, воспринимать объемное изображение во всем многообразии его ракурсов. Общее количество воспринимаемых им ракурсов может превышать 1000 при обеспечении плавности оглядывания (угол между соседними ракурсами не превышает 10 углю мин).
Для передачи сигналов ОТВ, обеспечивающих оглядывание в большем телесном угле, например, соизмеримом со стерадианом, потребуется использовать дополнительный телевизионный канал, при этом необходимо использовать соотношения 4 и 5, либо использовать телевизионный канал с расширенной полосой пропускания.
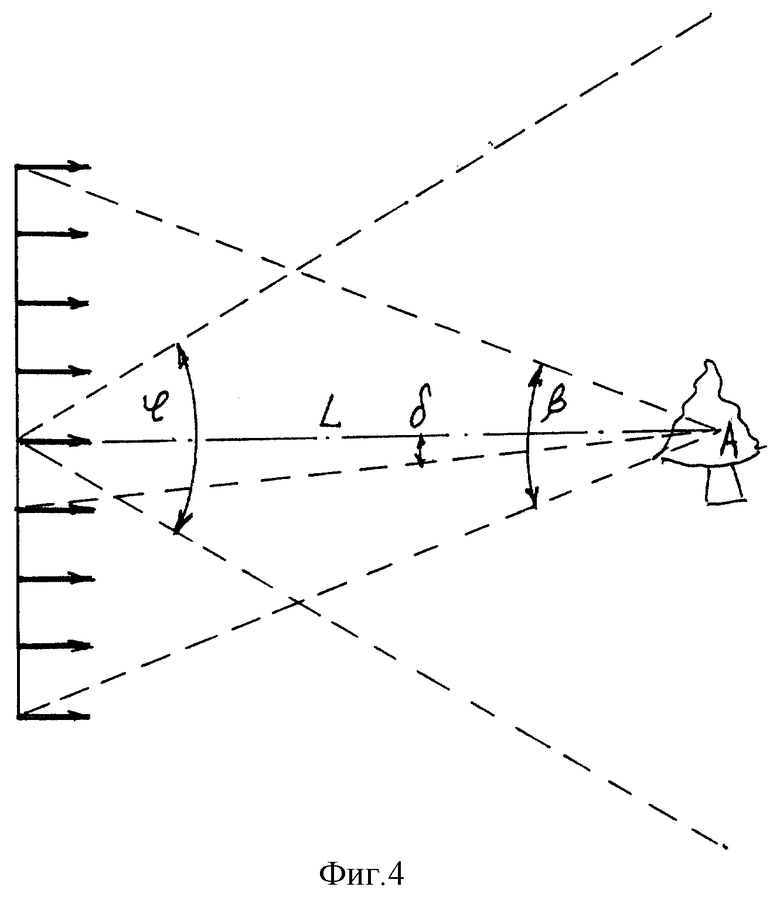
Если точку A выбирают в бесконечности (камеры располагают так, что их оптические оси параллельны), то угол конвергенции (угол δ) равен нулю.
Если в группе камер, (как в базовой, так и в группе ракурсов) используют две передающие камеры, то их располагают параллельно направлению строчной развертки.
Если в группе камер, (как в базовой, так и в группе ракурсов) используют более двух передающих камер, то их располагают на линии, подобной траектории строчной развертки передающих камер. (Если строчная развертка прямолинейна, как в существующих стандартных передающих камерах, то расположение передающих камер в группе параллельно направлению строчной развертки; если строчная развертка в каждой камере группы криволинейна, например спиральная, то расположение передающих камер в группе должно быть подобным направлению строчной развертки этих передающих камер в той ее части периода, когда данная группа передающих камер включена).
Подключение каждой группы передающих камер производят периодически: за полное время кадра каждая из групп передающих камер включается на определенный период, составляющий определенную часть периода как строчной, так и кадровой разверток. Базовая группа включается с периодичностью и на время, равное периодичности и времени передачи видеоинформации в стандартном телевизионном сигнале, остальные группы передающих камер включаются в последовательности, соответствующей их пространственному положению. Включение всех передающих камер внутри группы производят одновременно: включение групп передающих камер, расположенных на разных конических поверхностях (или плоскостях), производят синхронно с кадровой разверткой, а включение групп передающих камер, расположенных на одной конической поверхности (или в одной плоскости) производят синхронно со строчной разверткой.
Целесообразно оптимизировать и этап формирования базового кадра. На этом этапе можно разделить поле базового кадра на равные многоугольники с числом сторон b≥3 и каждому i-му многоугольнику поставить в соответствии одно и то же дискретное значение дальности. Для определенности, в дальнейшем будет полагать b= 4 форма многоугольника - прямоугольник, содержащий K•L элементов базового кадра; здесь
K≥1 - число элементов в прямоугольнике вдоль строки,
L≥1 - число строк, занимаемых прямоугольником.
Отметим, что адресное пространство базового кадра значительно превосходит требуемое для воспроизводства обычного телевизионного кадра, поскольку в нем, помимо элементов объекта, видимых из базовой точки 0, должны быть записаны также элементы, хотя и невидимые из базовой точки 0, но видимые из других, боковых ракурсов, необходимых для осуществления оглядывания объемного изображения.
Также отметим, что дополнительная информация о дальности прямоугольников с K•L элементами по объему значительно меньше, чем информация, передаваемая стандартным телевизионным сигналом. Пусть, например, система ОТВ различает 32 плана (что соответствует высокому качеству объемного изображения). Тогда на группу из KxL стандартных элементов базового кадра нужно один раз передать 5 двоичных разрядов, полностью описывающих поле дальностей элементов. Если, например, K=L=4, то дополнительно к каждому элементу стандартного телевизионного изображения необходимо передать 5/32=0,16 бита дополнительной информации. Такую незначительную по объему информацию можно передать, например, методом квадратурной модуляции стандартного сигнала с поднесущей, расположенной в более низкочастотной области спектра (например, на частоте 1,5 МГц), чем поднесущая цветоразностного сигнала.
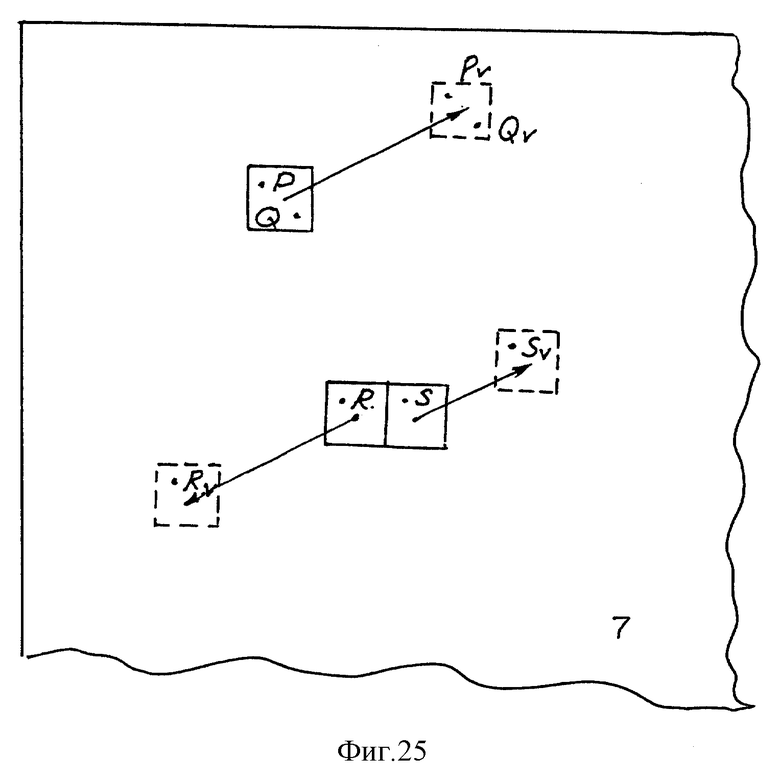
При воспроизведении осуществляют преобразование адресной части прямоугольников базового кадра, причем производят одно и то же изменение адресов всех KxL элементов внутри i-го прямоугольника без изменения их взаимного расположения. Например, если точки P и Q находятся внутри одного и того же i-го прямоугольника, то после преобразования адресов их взаимное расположение на плоскости воспроизводящего экрана не изменится. Если же другие точки R и S находятся внутри различных (j-го и k-го) прямоугольников, то возможны два варианта:
- если дальности, присвоенные этим прямоугольникам, одинаковы, то их взаимное расположение на плоскости воспроизводящего экрана также сохранится,
- если дальности, присвоенные этим прямоугольникам, отличаются, то их взаимное расположение на плоскости воспроизводящего экрана после пересчета адресов, вообще говоря, изменится.
Преобразование координат для каждого ракурса и образование соответствующих видеостраниц производится по следующим правилам:
- преобразуются координаты прямоугольников базового кадра за исключением тех, которым присвоен нулевой номер плана (прямоугольники, имеющие нулевой номер плана при записи расположены в плоскости, содержащей выбранную точку A, а при воспроизведении они расположены в плоскости изображающего экрана);
- последовательность преобразования координат базового кадра учитывает номер плана, преобразование начинается с самого удаленного и заканчивается самым ближним к зрителю планом;
- в видеостраницу данного ракурса попадают прямоугольники, имеющие адреса, не выходящие за пределы разрешенных адресов изображающего экрана.
Таким образом, преобразование координат прямоугольников базового кадра в соответствии с положением зрителя, осуществляемое на этапе воспроизведения объемного изображения позволяет отделить этап формирования базового кадра от положения зрителя, то есть появляется возможность записи объемного изображения в предлагаемой системе ОТВ, инвариантного к положению зрителя. Возможности такой записи в других, ранее известных системах ОТВ, не существовало.
Дальнейшую конкретизацию и, соответственно, оптимизацию предложенного способа целесообразно проводить, учитывая конкретное устройство изображающего экрана.
Пусть в устройстве воспроизведения используется плоский воспроизводящий экран, выполненный, например, на основе жидких кристаллов [6]. Этот экран можно представить состоящим из MxN прямоугольников, каждый i-прямоугольник содержит KxL элементов и имеет координаты центра Xio и Xio.
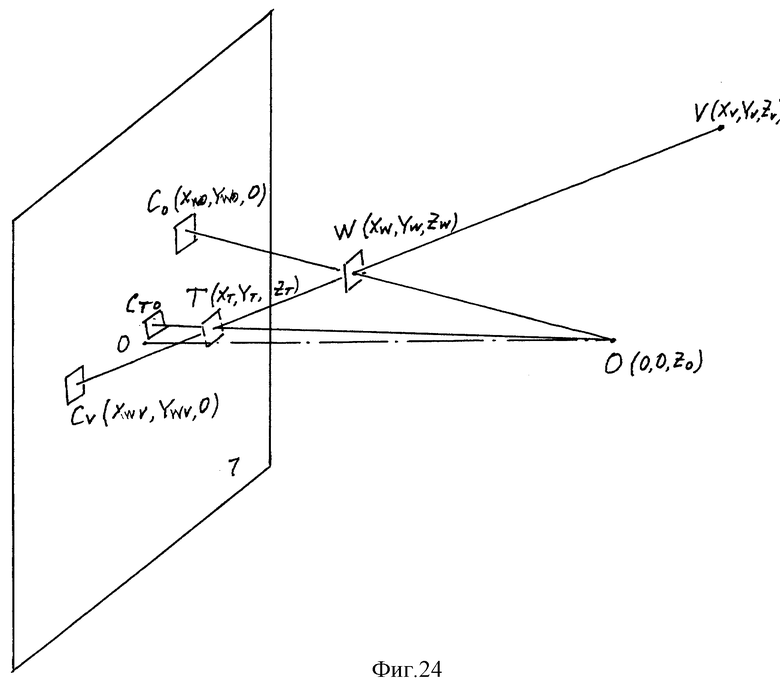
При наблюдении из базовой точки O(O,O,Zo) этот i-прямоугольник отображает определенную выше группу из K•L элементарных сигналов базового кадра. Например, трехмерный элемент объемного изображения W(Xw, Yw, Zw) проецируется из базовой точки O в точку Co(Xwo, Ywo, O). Базовый кадр в совокупности передаваемой информации содержит координаты передаваемых элементов (точек), в том числе содержит координаты точки Co(Xwo, Yw0, O). Рассматриваемый i-прямоугольник при наблюдении его из произвольной точки V(Xv, Yv, Zv) проецируется в другое место экрана, а его центр будет иметь координаты Xiv, и Yiv. Точка Co(Xwo, Ywo, O), не меняя своего относительного положения внутри i-го прямоугольника сместится по поверхности экрана в точку Cv(Xwv, Ywv, O).
Преобразование координат точки Co при ее перемещении в точку Cv осуществляют в соответствии с выражениями:
Xwv=(ZvXwo(Zo-Zw) -XvZwZo)/(Zv(Zo-Zw)) (6)
Ywv=(ZvYwo(Zo-Zw)- YvZwZo)/(Zv(Zo-Zw) (7)
где
Xv, Yv и Zv - координаты одного зрачка зрителя (точки V);
Xwo и Ywo - координаты проекции точки W(Xw, Yw, Zw) из базовой точки O на информационный экран;
Xw,Yw и Zw - пространственные координаты точки W(Xw,Yw,Zw) объекта;
O, O, Zo - координаты базовой точки O.
Так как все точки внутри, например, i-го прямоугольника получают одинаковое смещение, равное ΔXi и ΔYi, то и его центр сместится на ту же величину, т.е.:
Xiv-Xio=Xwv-Xwo= Δ Xi - по горизонтали и
Xiv-Yio=Ywv-Ywo= Δ Yi - по вертикали.
Величину Zo, для облегчения последующих вычислений, целесообразно выбрать кратной размерам пикселя (Xn) использованного изображающего экрана вдоль оси OX. Желательно использовать кратность, равную 2048=211, так как это близко к оптимальной дальности наблюдения зрителем объемного изображения, например, для экрана 21'' (500 мм) и размера пикселя 0,66 мм.
Zo=Xn•211 м =1,35 м.
При таком выборе базовой точки для данного изображающего экрана, алгоритм управления изображением ракурсов будет упрощен и инвариантен к размерам экрана.
При наличии нескольких зрителей измеряется положение каждого из них и для каждого зрителя формируют свою индивидуальную пару оптических изображений (полей). Поэтому, в случае N зрителей преобразование координат Xio и Yio для каждого прямоугольника осуществляется 2N раз. В частном случае, можно координату Yio не преобразовывать, тогда вертикальный ракурс будет совпадать с базовым для всех зрителей, а оглядывание изображения будет осуществляться только по азимуту.
Если изображающий экран выполнен иным способом (например, [7, 8]), то преобразования для Yiv производят также 2N раз, но вид выражений (6), (7) будет иным, в соответствии с примененным экраном. Вывод формул, аналогичных (6), (7), не представляет особых затруднений.
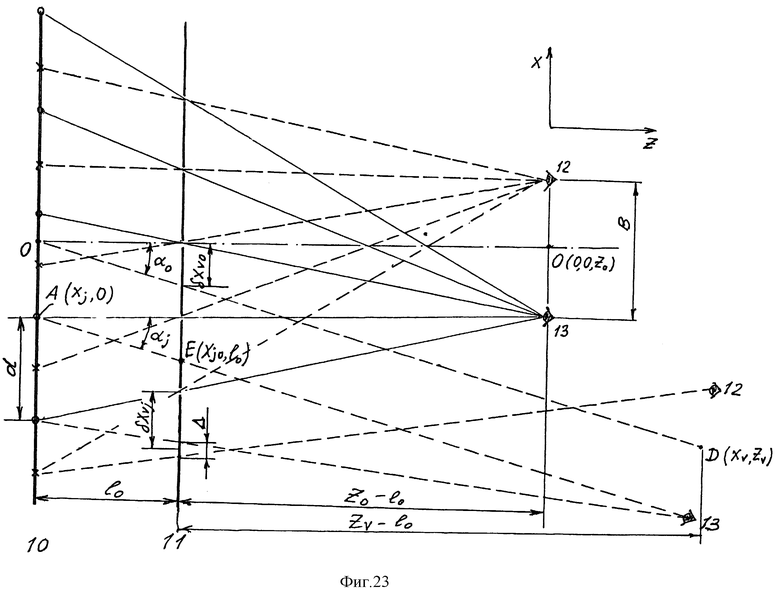
Для изображающего экрана, типа указанного выше [6], световые пучки формируют в соответствии с принципом действия этого экрана, (например, посредством обтюратора, образующего M пар прозрачных вертикальных щелей, и перемещающего эти щели синхронно с M•2N светоинформационными столбцами на информационной матрице); при этом должны выполняться условия наблюдения объемного изображения, а именно:
- положение центра щелей (Xjo) определяется из выражения:
- расстояние (Δ) между щелями в паре:
Δ = 2•(Zv•d-lo•B)/(Zv+lo), (9)
- смещение центра рабочей зоны обтюрационной панели ( δ Xvo) при перемещении зрителей по горизонтали:
δXv0 = l0•tgα0, (10)
где Xj - горизонтальная координата J-го светоинформационного столбца,
lo - расстояние между информационной матрицей и обтюрационной панелью,
d - шаг развертки информационной матрицы,
Xv и Zv - азимутальная координата и дальность переносицы зрителя, соответственно,
αj - горизонтальная компонента текущего пространственного угла между глазом зрителя и j-м светоинформационным столбцом с координатами (Xj,O),
α0 - горизонтальная компонента пространственного угла между осью Z и прямой, соединяющей переносицу зрителя с центром обтюрационной панели,
Выражения (8) - (10) представляют собой алгоритм связи кадровых разверток информационной матрицы и обтюрационной панели, включая их взаимную первоначальную установку.
Отметим, что если в выражении (9) хотя бы приблизительно выполняется равенство:
Zv•d=lo•B
то вершина Δ (расстояние между щелями в паре) равна нулю, то есть пара щелей выражается в одну щель. Это выгодное условие наблюдения и его целесообразно использовать. Для этого предлагается рекомендовать зрителям наилучшую дистанцию наблюдения объемного изображения):
Zv=Zo=Xn•211 м,
а отношение lo/d выбрать равным:
lo/d=Xn•211/B
Отметим также, что если число зрителей более одного, то для этапа воспроизведения изображения возможны два варианта:
вариант 1 - зрители расположены примерно на одной дальности Zv от изображающего экрана, тогда возможно параллельно воспроизводить все пары (всего 2N) изображений ресурсов);
вариант 2 - зрители расположены на существенно разных дальностях Zv изображающего экрана, тогда возможно, например, поочередное воспроизведение пар изображений ресурсов, что требует в N раз большего быстродействия воспроизводящего экрана.
Приведенные математические выражения (8) - (10) справедливы для одной конкретной конфигурации воспроизводящей оптической системы [6], которая, по мнению автора, является предпочтительной. Для заключительного этапа предложенного способа возможно использование и других средств формирования оптического изображения (например, [7, 8]). В таком случае, математические выражения (8) - (10) изменятся, но могут быть выведены без особых затруднений, не изменяя сути предложенного технического решения.
Понятно, что предложенное решение позволяет заменить этапы передачи и приема на этап записи и последующего воспроизведения записанной информации, так как координаты зрителя при записи не используются; в отличие от прототипа [9] координаты зрителя учитываются только на этапе воспроизведения.
Предложенное техническое решение возможно выполнить как посредством цифровой техники, так и аналоговой техники без принципиального изменения сути изображения.
Сущность предложенного решения дополнительно иллюстрируется фиг. 1 - 25, на которых изображены:
Фиг. 1 - функциональная схема (последовательность операций) известного технического решения [9].
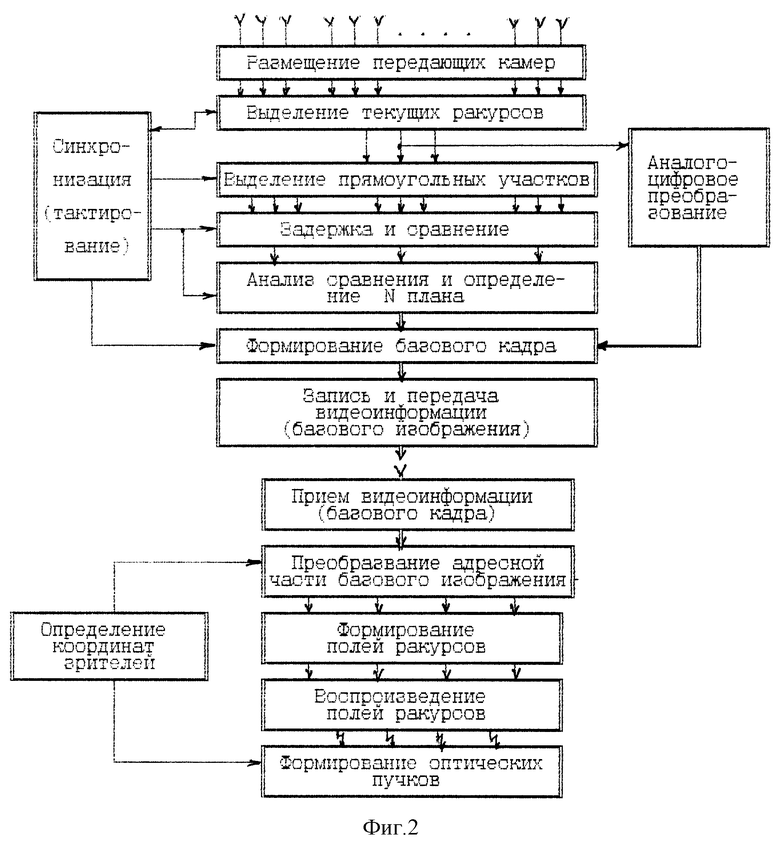
Фиг. 2 - функциональная схема (последовательность операций) предложенного способа.
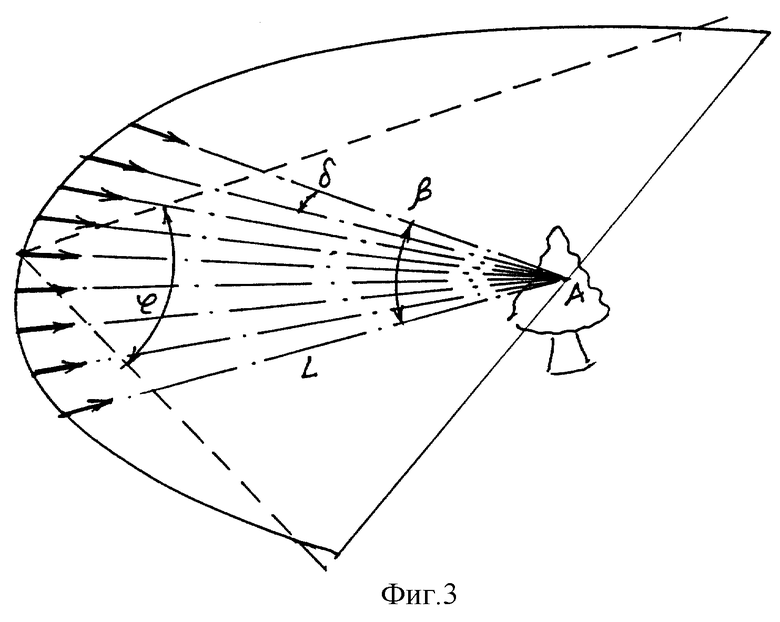
Фиг. 3 - вариант расположения передающих камер общий как для предлагаемого, так и для известного технического решения [9], обеспечивающий оглядывание объемного изображения по азимуту.
Фиг. 4 - вариант расположения передающих камер общий как для предлагаемого, так и для известного по азимуту, когда точка A расположена в бесконечности.
Фиг. 5 - обобщенная блок-схема устройства, реализующего предложенный способ.
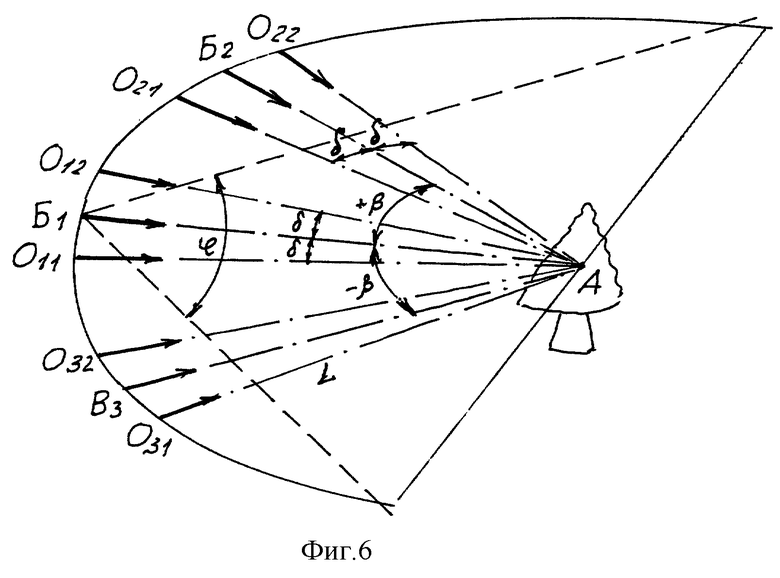
Фиг. 6 - расположение передающих камер на этапе наблюдения при числе групп передающих камер, равном трем, и числе передающих камер в каждой группе, равном трем (оглядывание объемного изображения только по азимуту).
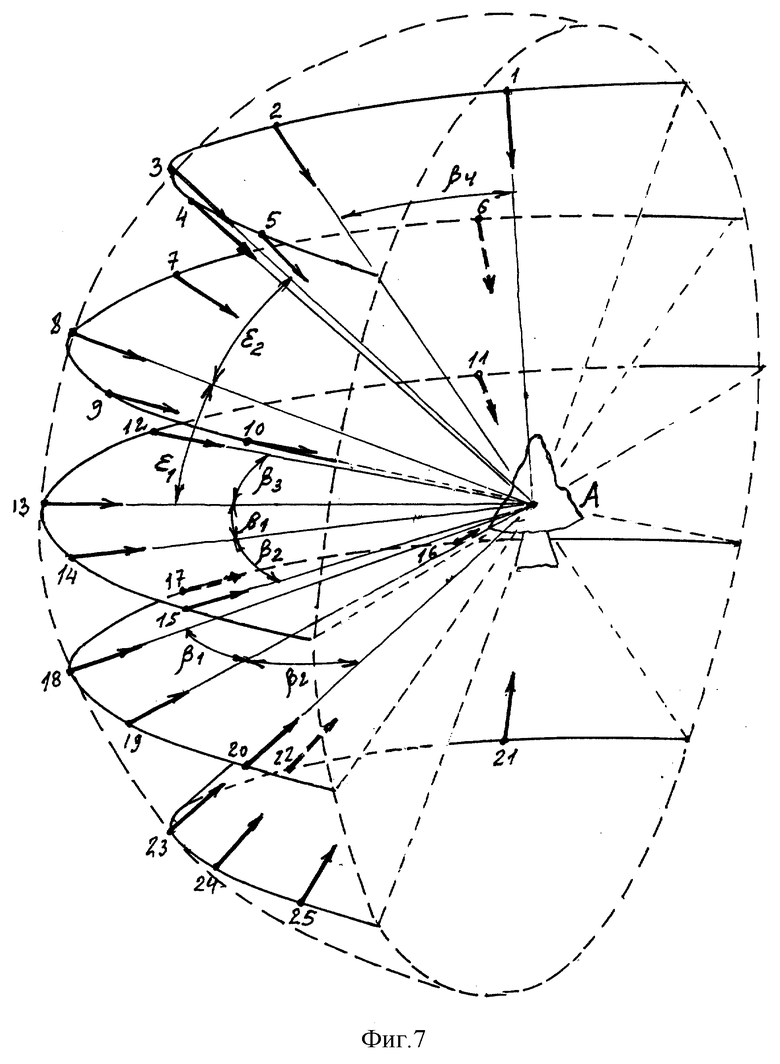
Фиг. 7 - общий случай расположения передающих на этапе наблюдения, обеспечивающих оглядывание объемного изображения в больших углах как по азимуту, так и по вертикали, при числе групп передающих камер, равном двадцати пяти (число передающих камер в каждой группе не конкретизируется).
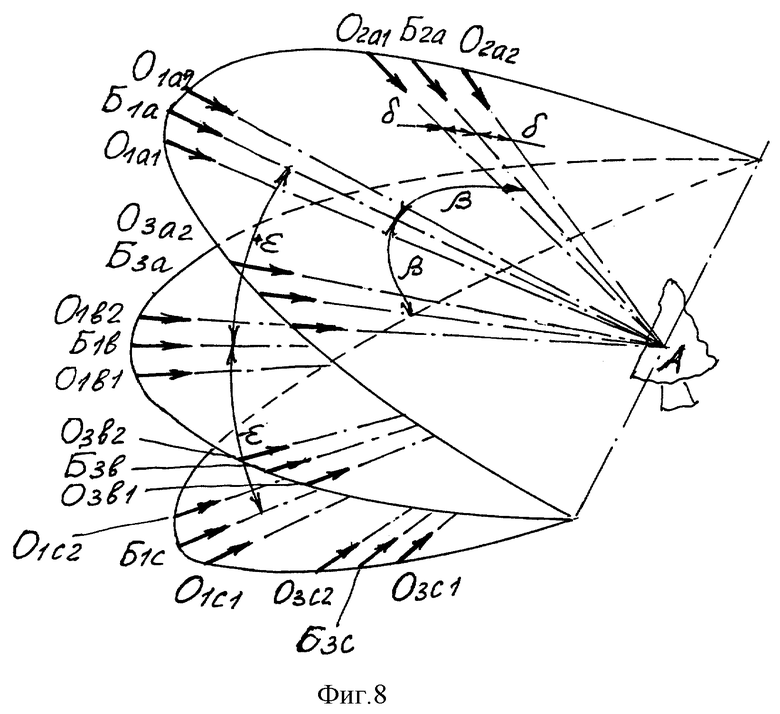
Фиг. 8 - допустимое расположение передающих камер на этапе наблюдения, обеспечивающее оглядывание объемного изображения как по азимуту, так и по вертикали в пределах небольших углов (меньших ±0,1 радиана), при числе групп передающих камер, равном девяти, и числе передающих камер в каждой группе, равном трем.
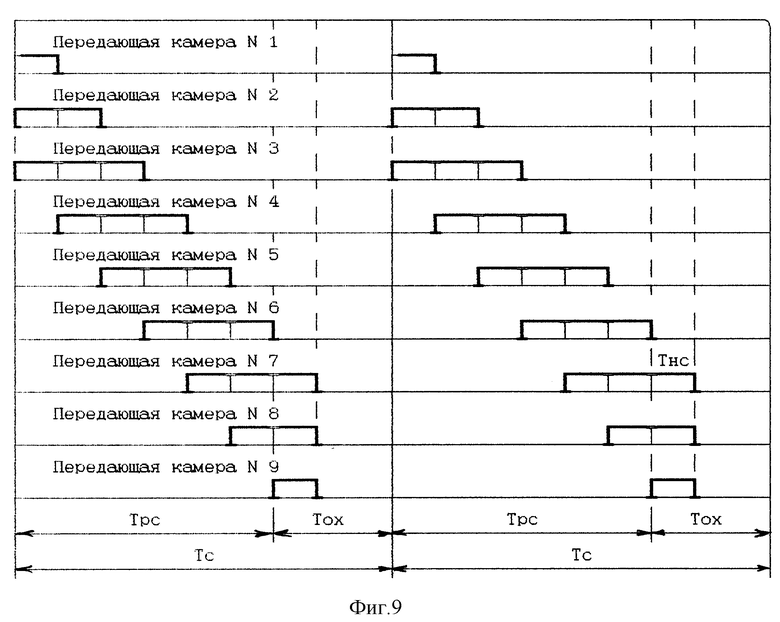
Фиг. 9 - временная диаграмма для последовательности включения передающих камер при равномерном расположении по азимуту девяти передающих камер (по фиг. 3, 4).
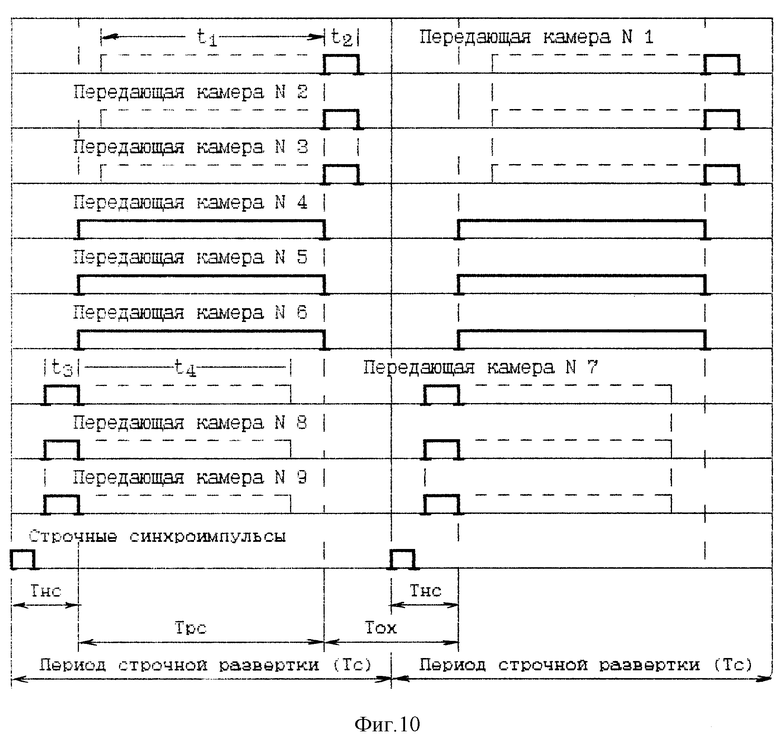
Фиг. 10 - временная диаграмма включения девяти передающих камер, объединенных в три группы (по фиг. 3, 4 и 6), обеспечивающая совместимость передаваемых сигналов со стандартными телевизионными сигналами и оглядывание объемного изображения по азимуту; T1 и T4 - неиспользуемые для записи базового кадра части периода строчной развертки передающих камер; T2 и T3 - используемые для записи базового кадра части периода строчной развертки передающих камер.
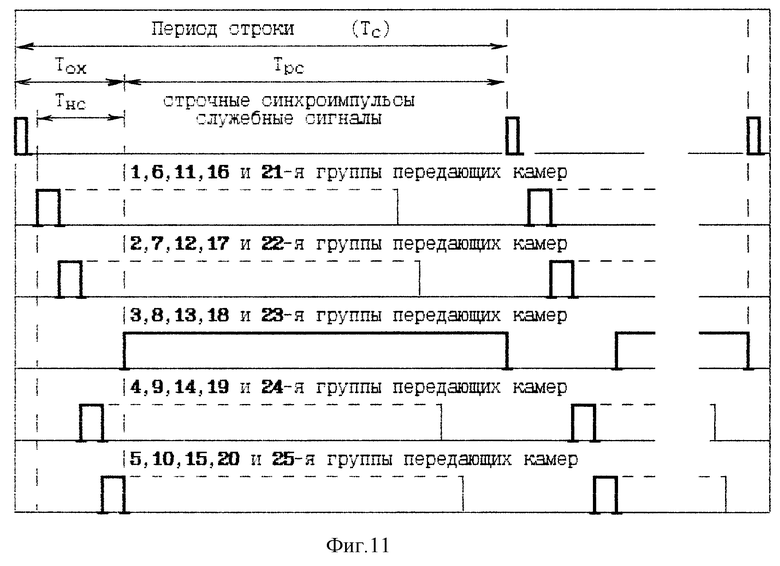
Фиг. 11 - временная диаграмма включения двадцати пяти групп передающих камер в течение длительности строки, (по фиг. 7), обеспечивающая оглядывание объемного изображения по азимуту и совместимость сигналов ОТВ со стандартными телевизионными сигналами.
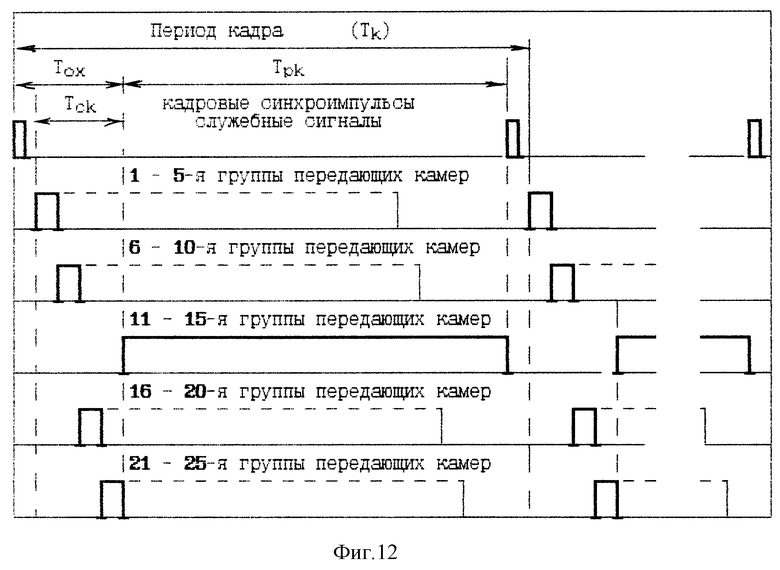
Фиг. 12 - временная диаграмма включения пяти слоев (по пять групп передающих камер в слое) в течение времени кадра, (по фиг. 7), обеспечивающая оглядывание объемного изображения по вертикали и совместимость сигналов ОТВ со стандартными телевизионными сигналами.
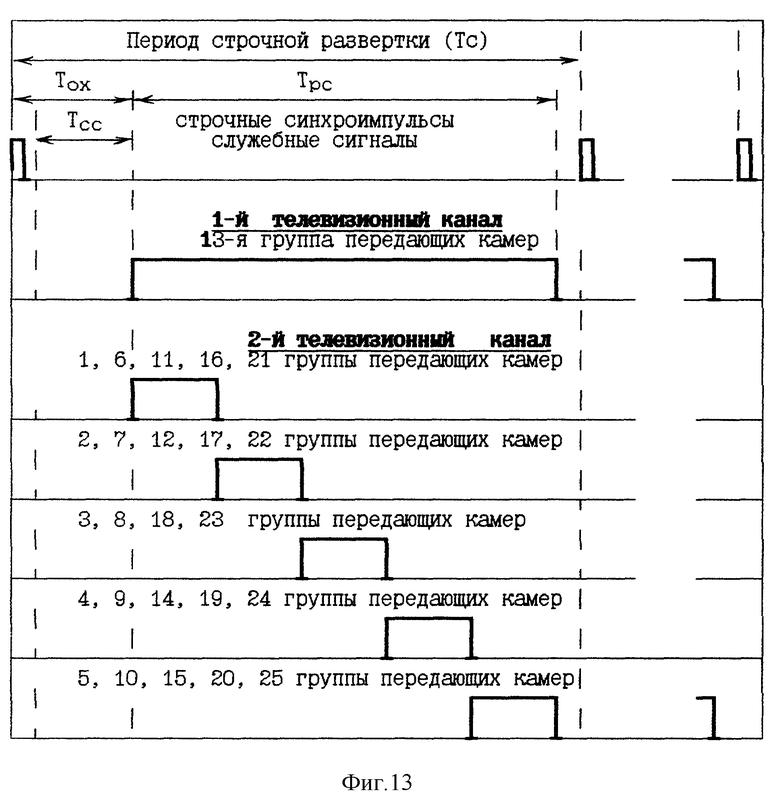
Фиг. 13 - временная диаграмма включения двадцати пяти групп передающих камер в течение длительности строки, (по фиг. 7), обеспечивающая оглядывание объемного изображения в больших углах по азимуту и использующая для передачи базового кадра дополнительный стандартный телевизионный канал.
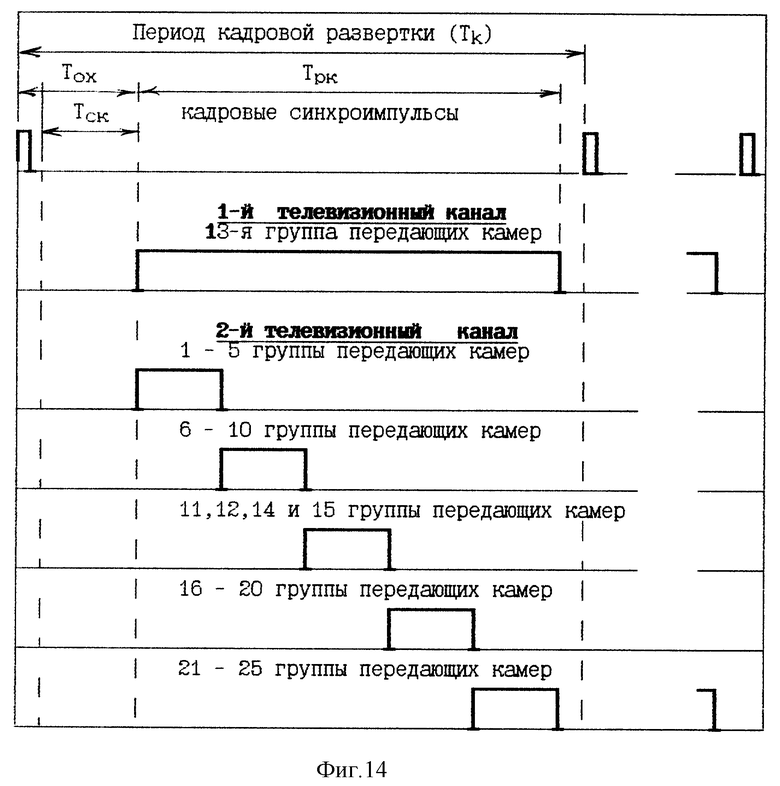
Фиг. 14 - временная диаграмма включения двадцати пяти групп передающих камер в течение длительности кадра, (по фиг. 7), обеспечивающая оглядывание объемного изображения в больших углах по вертикали и использующая для передачи базового кадра дополнительный стандартный телевизионный канал.
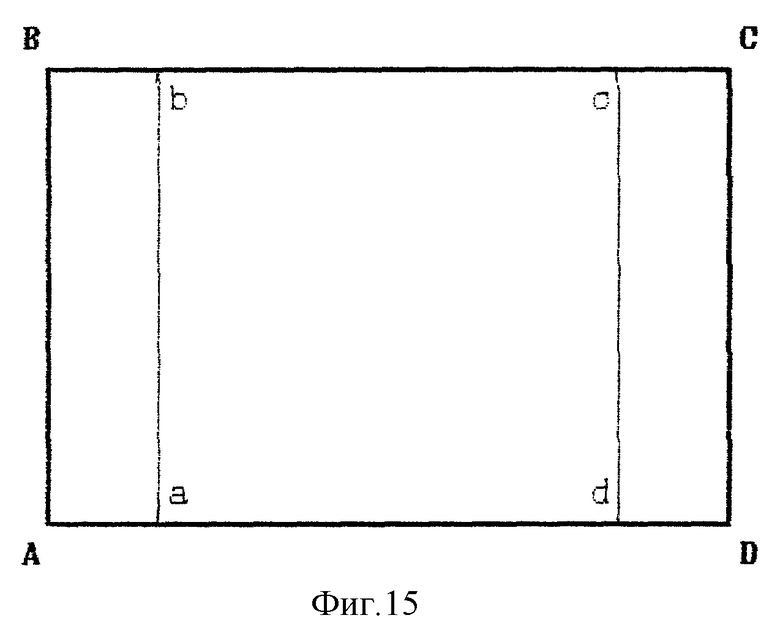
Фиг. 15 - поля обзора, передаваемые базовым кадром (A, B, C, D) для передающих камер, расположенных по фиг. 6, базовой группой передающих камер (a, b, c, d) и поля обзора (A, B, b, a) и (d, c, C, D), передаваемые двумя группами ракурсов.
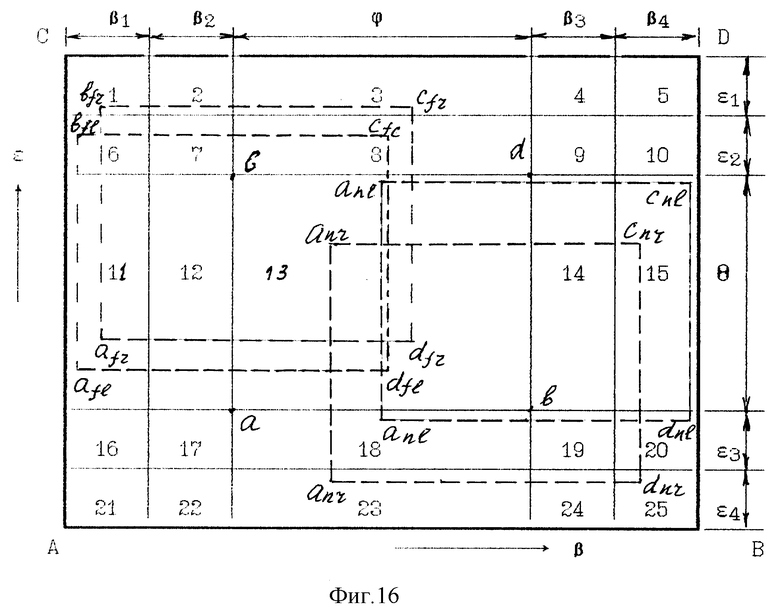
Фиг. 16 - поля обзора, передаваемые базовым кадром (A, B, C, D), стандартным телевизионным кадром (a, b, c, d) и поля обзора, передаваемые двадцатью пятью группами передающих камер в одном из планов; расположение передающих камер по фиг. 7; поле обзора каждой i-группы передающих камер показано соответствующей цифрой; здесь:
anr, bnr,cnr,dnr - границы воспроизводимого поля в ближнем плане для левого глаза зрителя;
anl, bnl, cnl, dnl - границы воспроизводимого поля в ближнем плане для правого глаза зрителя;
afr, bfr,cfr,dfr - границы воспроизводимого поля в дальнем плане для левого глаза зрителя;
afl, bfl, cfl, dfl - границы воспроизводимого поля в дальнем плане для правого глаза зрителя;
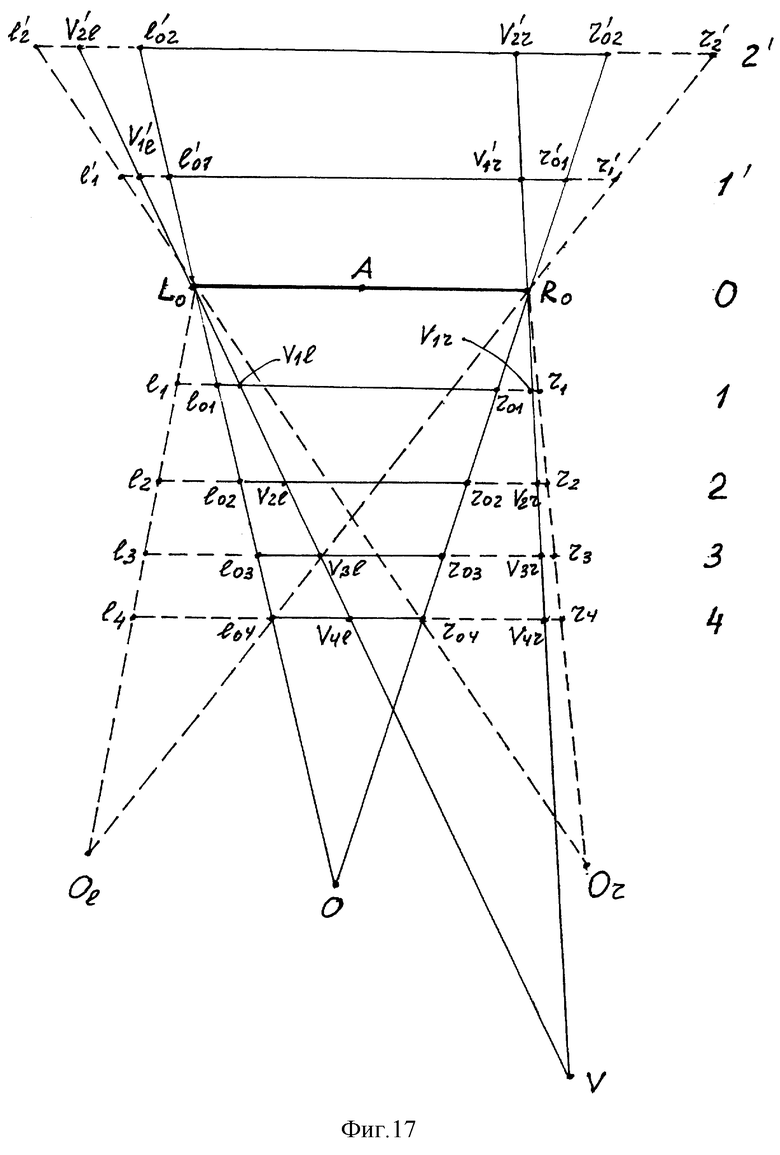
Фиг. 17 - смещение поперечных границ поля видения в зависимости от номера плана для произвольного положения зрителя V(Xv,Yv,Zv), вид сверху, здесь;
- LoRo - плоскость изображающего экрана;
- A точка в центре наблюдаемой сцены;
- O базовая точка при наблюдении изображения;
- OL и OR левая и правая точки восприятия, соответствующие крайнему левому и крайнему правому расположению зрачков основных передающих камер на этапе записи объемного изображения;
- V точка произвольного положения глаза зрителя в пределах угла оглядывания;
- линии, параллельные LoRo - плоскости расположения элементов изображения (планы),
сплошные линии - области плана, видимые из базовой точки, пунктирные линии - области плана, которые можно увидеть из других точек сектора обзора;
- ViL, ViR - левая и правая границы i-плана, видимые из точки V, соответственно;
- li, ri - левая и правая границы i-плана, записанные в базовом кадре и воспроизводимые системой ОТВ;
- loi, roi - левая и правая границы i-плана, видимые из базовой точки O.
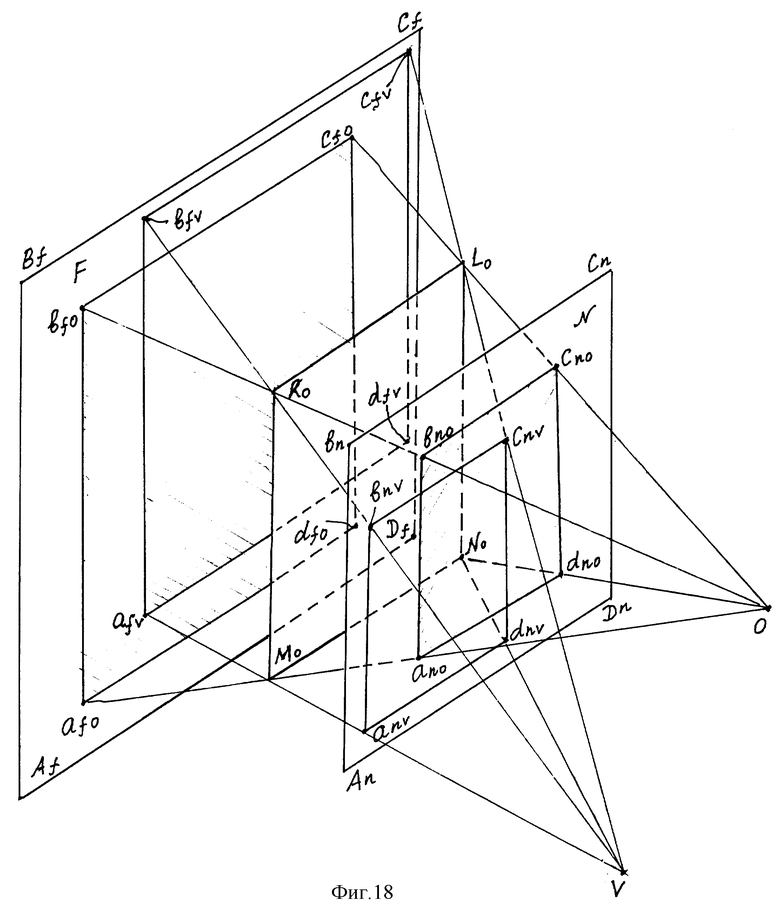
Фиг. 18 - поле обзора, передаваемое базовым кадром в ближнем плане
(An, Bn, Cn, Dn), в данном плане (Af, Bf, Cf, Df) и плоскость экрана устройства воспроизведения (Mo, Ro, Lo, No),
anc, bno, cno, dno - границы воспроизводимого поля в ближнем плане для базовой точки O;
anv, bnv, cnv, dnv - границы воспроизводимого поля в ближнем плане для произвольной точки V;
afo, bfo, cfo, dfo - границы воспроизводимого поля в дальнем плане для базовой точки O;
afv, bfv, cfv, dfv - границы воспроизводимого поля в дальнем плане для произвольной точки V.
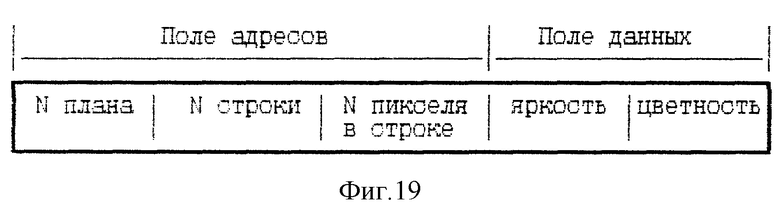
Фиг. 19 - формат машинного слова, определяющего элемент базового кадра при цифровом способе представления элемента базового кадра.
Фиг. 20 - спектр сигналов базового кадра при аналоговом способе представления элемента базового кадра.
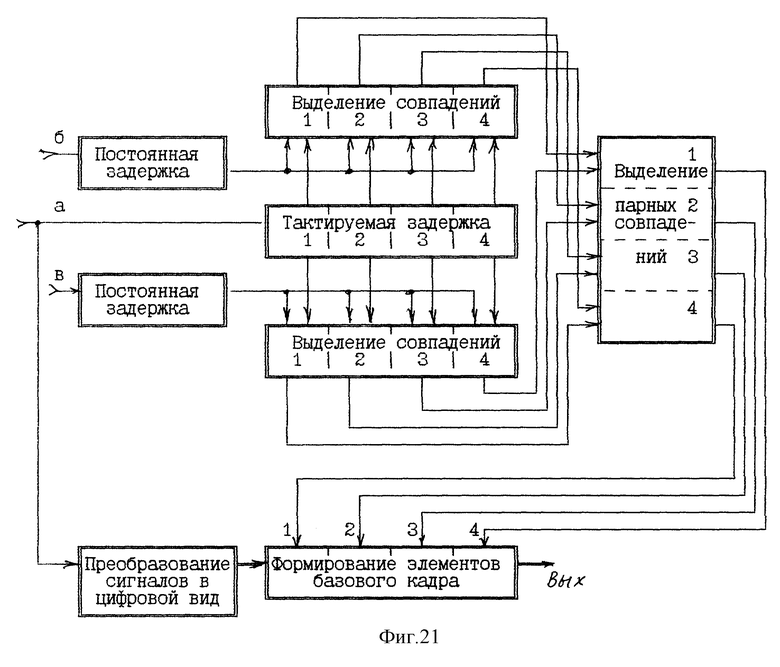
Фиг. 21 - функциональная схема операции формирования базового кадра.
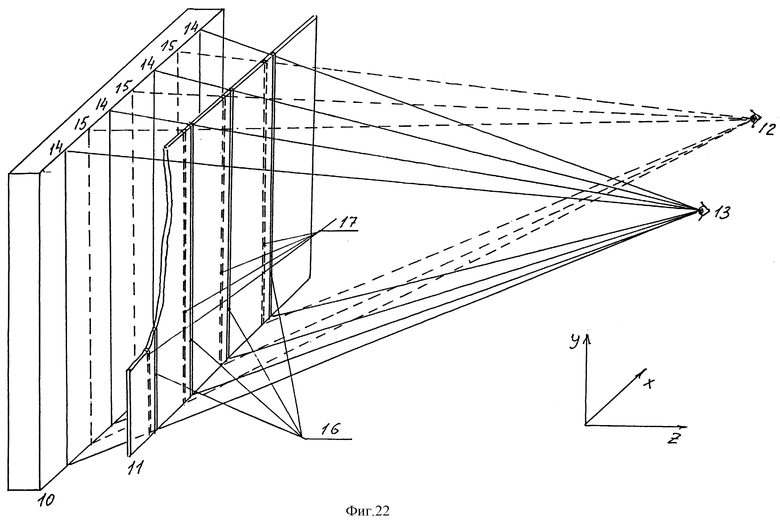
Фиг. 22 - оптическая схема блока воспроизведения в варианте воспроизводящего экрана с обтюрационной панелью и информационной матрицей.
Фиг. 23 - оптическая схема, поясняющая преобразование адресов пикселей с учетом координат зрителя в варианте воспроизводящего экрана с обтюрационной панелью и информационной матрицей (к выводу выражений 6 и 7).
Фиг. 24 - оптическая схема, поясняющая преобразование координат щелей на обтюрационной панели с учетом координат зрителя в варианте воспроизводящего экрана с обтюрационной панелью на жидких кристаллах и информационной матрицей.
Фиг. 25 - пример расположения прямоугольников базового кадра (сплошные контуры), смещение точек P и Q, расположенные внутри одного прямоугольника, после преобразования адресов базового кадра в поле ракурса, а также смещение точек R и S, расположенных в разных прямоугольниках после такого преобразования (пунктирные контуры).
Фиг. 1, 3, 4 и 5 отражают черты технического решения, общие как для известного способа [9], так и для предложенного. Все остальные фигуры относятся только к предложенному решению. Как видно из сравнения функциональных схем операций а также рисунков 3-12 в прототипе (фиг. 1) и в предложенном способе (фиг. 2), даже в общих по названию операциях: "размещение передающих камер", "выделение текущих ракурсов", "передача информации", "воспроизведение ракурсов", сами эти операции проводятся по-разному:
- в операции "размещение передающих камер" в прототипе подразумевается лишь равномерное расположение передающих камер с постоянной конвергенцией соседних передающих камер; в предложенном решении передающие камеры размещаются группами, а величины конвергенции и расстояния между соседними передающими камерами равны только внутри этих групп;
- в операции "выделение текущих ракурсов" в прототипе производится включение только той пары передающих камер, которая соответствует положению зрителя, а при передаче информации в течение длительности кадра переключение передающих камер не производится; в предложенном способе производится периодическое включение каждой из передающих камер в течение длительности кадра, а при формировании передаваемых сигналов не учитываются координаты зрителя, как это имеет место в прототипе;
- операция передачи видеоинформации также осуществляется по-разному; в известном решении передается стереопара, в предложенном - базовый кадр;
- операция воспроизведения видеоинформации (изображения ракурсов) также различается:
- в прототипе воспроизводятся сигналы стереопары, соответствующей положению зрителя;
- в предложенном решении формируются новые адреса пикселей с учетом как переданной информации, так и измеренных координат зрителей; координаты зрителя в прототипе учитываются только лишь для формирования оптических пучков и выделения текущих ракурсов стереопары; в предложенном решении эти координаты используются как для формирования оптических пучков, так и для формирования полей ракурсов из принятых сигналов базового кадра.
Кроме того, в предложенном решении добавлены новые операции:
- задержки сигналов и их сравнения с целью определения дальности участков - операции, необходимые для формирования базового кадра, отсутствующей, как таковой, в прототипе;
- преобразование адресов пикселей базового кадра в зависимости от положения зрителя.
Именно эти черты предложенного решения позволяют, в отличие от прототипа, не только воспроизведение в реальном времени, но и запись объемного изображения.
Как видно из сравнения фиг. 3, 4 и фиг. 6 - 8, отображающих размещение передающих камер (направление их оптических осей на рисунках изображено стрелками) как в известном, так и в предложенном решении, по-разному осуществляют размещение и цикличность работы передающих камер на этапе наблюдения. У прототипа передающие камеры располагают по дуге или в линейку (см. фиг. 3 и 4) на равном расстоянии друг от друга и с одинаковой конвергенцией оптических осей соседних передающих камер. В течение по крайней мере периода кадра работает пара соседних передающих камер; остальные передающие камеры в течение этого кадра отключены, их подключение зависит от положения зрителя.
В предложенном решении передающие камеры располагают либо по дуге, либо в линейку, либо на сферической поверхности, при этом допускают как равномерное (фиг. 3 и 4), так и неравномерное расположение передающих камер (фиг. 6 - 8). Но в любом случае передающие камеры объединяют в группы по две или три штуки в каждой группе. Так, на фиг. 6, 7 и 8, соответственно, показаны три группы по три передающие камеры в группе, двадцать пять групп передающих камер (число передающих камер в группе не конкретизировано) и девять групп по три передающие камеры в группе. Если оптические оси всех передающих камер компланарны (фиг. 6), то это позволяет, в дальнейшем, оглядывать объект только в азимутальной плоскости. Размещение передающих камер по фиг. 7 и 8 позволяет оглядывание как в азимутальной, так и вертикальной плоскостях.
На фиг. 7 одна базовая и двадцать четыре дополнительные группы передающих камер размещены на различных азимутальных и вертикальных положениях, причем положение зрачков и оптических осей всех передающих камер должны удовлетворять вышеназванным условиям (формулы 1-5).
На фиг. 8 показано упрощенное расположение девяти групп передающих камер по три передающие камеры в группе, обеспечивающее оглядывание в небольших углах как в горизонтальной, так и в вертикальной плоскости, для чего шесть дополнительных групп передающих камер размещают вне азимутальной (центральной) плоскости; при этом передающие камеры располагают в наклонных плоскостях, составляющих с центральной плоскостью угол ±ε и разносят по азимуту на равные углы ±β. Отметим, что условия правильного размещения передающих камер в этом случае, вообще говоря, нарушены, такое упрощенное расположение допустимо только в системах ОТВ, обеспечивающих небольшой угол оглядывания (около ± 0,1 радиана).
Во всех рассмотренных случаях, в том числе, и при равномерном расположении передающих камер (фиг. 3 и 4), каждая группа передающих камер в течение периода строки включается на определенный отрезок времени, независимо от положения зрителя.
В отличие от прототипа [9], в предложенном решении для передачи видеосигнала базового кадра используется не только время, отведенное для воспроизведения видеоизображения, но и время, в течение длительности кадра, когда видеоинформация не передается или не воспроизводится, например часть времени, отведенного на обратный ход строчной развертки (около 12 мкс в стандартах PAL, SECAM) не занятого служебными сигналами, а также часть периодов строчной и кадровой развертки, в течение которой не воспроизводится видеоинформация (например, первые 34 строки в каждом полукадре в стандартах PAL, SECAM и невоспроизводимая часть времени прямого хода строчной развертки - около 10% Tnx).
Кроме того, в отличие от прототипа, при котором вид и спектр передаваемых видеосигналов остаются стандартными, а для передачи используются два стандартных видеоканала, в предложенном решении меняется форма сигнала и его спектр (фиг. 18 и 19), и несмотря на увеличение объема передаваемой информации, для осуществления передачи 1000 ракурсов достаточно лишь одного телевизионного канала со стандартной полосой частот (6 МГц), а для передачи 100000 ракурсов достаточно телевизионного канала с двойной полосой частот (до 12 МГц),
На фиг. 9 - 14 представлены варианты циклограмм работы видеокамер при записи базового кадра. На фиг. 9 представлен вариант равномерного и поочередного использования всех девяти передающих камер, расположенных по фиг. 3 и 4, для создания базового кадра. Отметим, что для передачи дополнительной видеоинформации об элементах объекта, невидимых из базовой точки O, используется часть периода строчной развертки (Tнс, см. фиг. 9 и 10) не занятая воспроизводством видеоинформации и служебными сигналами, включая невоспроизводимую часть времени прямого хода строчной развертки - около 10% Tpc. Такое включение передающих камер приемлемо в тех случаях, когда не требуется совместимость передаваемых сигналов со стандартными телевизионными сигналами, поскольку в описываемом случае ракурс наблюдения объекта скачкообразно перемещается в пространство, чего не происходит при передаче изображения в существующих телевизионных системах.
Обеспечить совместимость для такого расположения передающих камер можно, объединяя их в группы и синхронизируя включение передающих камер в группе, как показано на фиг. 10. На рисунке выделен интервал прямого хода строчной развертки каждой передающей камеры (пунктирный прямоугольник), в котором сплошными линиями выделены интервалы времени (t2 и t3), когда сигналы данной передающей камеры используются при формировании базового кадра. Такая циклограмма работы передающих камер пригодна и для их неравномерного пространственного расположения, как показано на фиг. 6 и обеспечивает возможность оглядывания изображения в некотором угле ±β в азимутальном направлении.
В такой циклограмме ракурс не меняется в течение интервала времени воспроизводимой части прямого хода строчной развертки и этим обеспечивается совместимость сигналов базового кадра со стандартными телевизионными сигналами.
Циклограмма работы передающих камер, обеспечивающих оглядывание объемного изображения как по азимуту, так и по вертикали (расположение передающих камер показано на фиг. 7) представлена на фиг. 11 - 14. Отметим, что в отличие от рассмотренных ранее циклограмм для отдельных передающих камер, на фиг. 11, 13 представлены циклограммы включения групп передающих камер по периоду строки, а на фиг. 12, 14 - циклограммы включения групп передающих камер по периоду кадра, причем суммарное время включения всех групп передающих камер по строке соответствует выражениям (2) или (4), а суммарное время включения всех групп передающих камер по кадру соответствует выражениям (3) или (5).
Зона, наблюдаемая передающими камерами, и зона видения объемного изображения связаны между собой соотношениями (2)-(5). Эта связь заключается в жестком задании точки A (в зоне наблюдения) и базовой точки O (в зоне видения). Только при наличии этой связи обеспечивается как подобие наблюдаемого изображения реальному объекту, так и соответствие сформированных сигналов между собой по всей цепочке способа ОТВ.
Если зритель расположен так, что, например, его правый глаз находится в базовой точке O (см. фиг. 15), то этим глазом он увидит изображение, соответствующее стандартному телевизионному сигналу (границы горизонтальных и вертикальных углов видения на этапе наблюдения обозначены прямоугольником abcd, заштрихованным на рисунке).
При смещении зрителя по азимуту, например, вправо, при оглядывании, точки, расположенные ближе точки A, в каком-либо j-плане, сместятся влево и займут новое положение, например в границах efgh. Это смещение точек будет тем значительнее, чем больше отличие их дальности от нулевого плана. Точки, лежащие в нулевом плане (напомним, что нулевой план представляет собой поверхность, содержащую точку A при записи и поверхность экрана монитора объемного изображения при воспроизведении) останутся на своих местах (прямоугольник abcd) для любого ракурса. Точки, расположенные дальше точки A, в каком-нибудь k-плане, сместятся вправо и займут новые положения, например положение klmn.
При этом объем и качество видеоинформации, воспринимаемой каждым глазом, будет соответствовать телевизионному стандарту, но по содержанию она будет отличаться от видеоинформации, воспринимаемой в точке O. По сумме двух полей, отличающихся для каждого глаза, зритель увидит объемное изображение, соответствующее его азимутальному положению.
Отметим, что при больших отклонениях зрителя от базовой точки O некоторые элементы объемного изображения, расположенные вне нулевого плана, могут выйти за пределы прямоугольника ABCD. В этом случае они уйдут из поля зрения и станут невидимы для зрителя.
Если передающие камеры расположены так, как показано на фиг. 7, а циклограмма их включения удовлетворяет приведенной на фиг. 11 и 12, то оглядывание возможно при смещении зрителя относительно базовой точки O не только по азимуту, но и по вертикали (см. фиг. 16). Греческими буквами показаны пространственные зоны углов видения объекта (базовая зона β0 = ϕ, ε0 = θ и дополнительные зоны βi и εi, где i=1-4).
Фиг. 16 иллюстрирует двумерное смещение полей видения зрителем. Если зритель расположен в произвольной точке V, смещенной влево и вверх при произвольном положении головы (пусть правый глаз зрителя дополнительно смещен вправо и вверх на величину B), то области видения будут занимать положения:
- для нулевого плана - заштрихованный прямоугольник abcd;
- для какого-либо ближнего j-плана - смещение вправо и вниз (площадка an1, bn1, cn1, dn1 для левого глаза и площадка anr, bnr, cnr, dnr для правого глаза);
- для какого-либо дальнего k-плана - смещение влево и вверх (площадка af1, bf1, cf1, df1 для левого глаза и площадка afr, bfr, cfr, dfr для правого глаза).
При перемещении зрителя область видения также будет перемещаться и занимать, соответственно, для левого и правого глаза какие-то новые границы. При этом объем видеоинформации, воспринимаемый каждым глазом, будет соответствовать объему видеоинформации стандартного плоского сигнала, снятого с соответствующего ракурса. По сумме двух плоских отличающихся для каждого глаза полей, зритель получит впечатление объемного изображения и возможность оглядывания как по азимуту, так и по вертикали. Если зритель сместится настолько, что часть элементов объемного изображения, расположенных в далеких или близких планах, выйдет за пределы прямоугольника ABCD, то зритель не увидит эти элементы.
Фиг. 17 иллюстрирует зависимость величины смещения полей зрения для разных планов при произвольном положении зрителя. На этапе формирования базового кадра передающие камеры были расположены так (см. фиг. 6), что перекрывали некоторый дополнительный сектор видения по азимуту. Границы возможного воспроизведения полей ракурсов для разных планов:
l0i, r0i - границы, видимые из базовой точки O, сплошные линии;
li - левая граница поля обзора, видимая из точки O1 для i-го плана, пунктирные линии;
ri - правая граница поля обзора, видимая из точки Or для i-го плана, пунктирные линии;
Vil, Vir - границы, видимые из произвольной точки V, сплошные линии;
4, 3, 2, 1, 0, 1', 2' - последовательные номера планов.
Фиг 17 качественно показывает рост величины смещения границ поля ракурса по мере выхода воспроизводимого элемента из нулевого плана (плоскость экрана, линия Lo, Ro).
Фиг. 18 качественно показывает:
двумерное распределение элементов изображения базового кадра:
- M0, R0, L0, N0 - для нулевого плана;
- An, Bn, Cn, Dn - для ближнего плана;
- Af, Bf, Cf, Df - для дальнего плана;
двумерное распределение элементов изображения базового ракурса:
- ano, bno, cno, dno - для ближнего плана;
- afo, bfo, cfo, dfo - для дальнего плана;
двумерное распределение элементов изображения из произвольного ракурса:
- anv, bnv, cnv, dnv - для ближнего плана;
- afn, bfn, cfn, dfn - для дальнего плана.
Отметим, что объем передаваемой видеоинформации в базовом кадре предложенного способа превышает объем информации, содержащейся в стандартном телевизионном кадре по всем трем измерениям:
- по азимутальному углу видения объекта,
- по вертикальному углу видения объекта,
- по объему информации, описывающему элемент наблюдения объекта; например, элементарный тактированный видеосигнал усложнен наличием в нем сигнала дальности этого элемента. При выполнении способа методами цифровой техники машинное слово, описывающее один элемент базового кадра показано на фиг. 19. Это слово отличается от машинного слова, используемого в стандартных цифровых системах, наличием дополнительной информации о номере плана, в котором данный элемент расположен.
Избыточную, по сравнению со стандартным телевизионным кадром, информацию по каждому из измерений можно передавать различным образом:
- для расширения азимутального угла видения объекта использовать часть периода строчной развертки, не занятого воспроизведением видеоинформации и служебными сигналами;
- для расширения вертикального угла видения объекта использовать часть времени кадра, не используемого для воспроизведения видеоинформации.
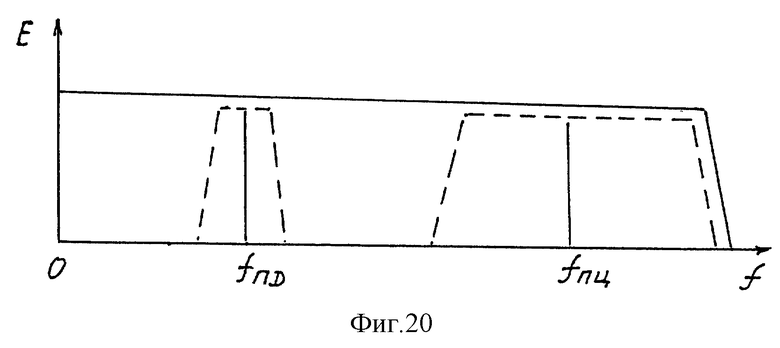
Для передачи дополнительной информации, описывающей каждый элемент наблюдаемого объекта, в частности, для передачи информации о дальности элемента, использовать широко известный метод квадратурной модуляции, с последующей, расположенной в низкочастотной части спектра стандартного телевизионного сигнала с дальностной поднесущей Fnd = 1,5 МГц. Подобный метод используется в стандартном телевидении для передачи информации о цвете наблюдаемого объекта и для обеспечения совместимости цветного и черно-белого воспроизведения. Спектр передаваемых видеосигналов в предложенном способе показан на фиг. 20.
Подробно операция формирования базового кадра представлена на фиг. 21. Отметим, что в каждый текущий момент времени в формировании базового кадра принимает участие какая-то одна группа передающих камер. Также напомним, то одна из передающих камер является основной. Для определенности полагаем, что в группе 3 передающих камеры, центральная является основной, а остальные две - левая и правая дополнительные.
Видеосигналы с выхода основной передающей камеры потактово задерживаются и на каждом такте задержки попарно сравниваются с видеосигналами дополнительных передающих камер, которые также задержаны, но на постоянное число тактов. Сравнение производится для двух пар видеосигналов: основного с левым дополнительным, а также основного с правым дополнительным. Пусть максимальное число тактов задержки видеосигналов основной передающей камеры равно P. В дальнейшем, это число будет определяться количеством различимых планов в объемном изображении. Целесообразно величину постоянной задержки видеосигналов обеих дополнительных передающих камер сделать близкой к P/2 тактов. Сравнение видеосигналов можно производить, например, отдельно по каждой из выделенных цветовых (красной, зеленой и голубой). При совпадении в обеих парах сравниваемых видеосигналов всех компонент видеосигнала (или хотя бы двух из трех) на каком-либо такте выделяется сигнал, добавляющийся к видеосигналам основной передающей камеры на этом же такте. Величина этого сигнала пропорциональна номеру такт, на котором произошло совпадение.
Реализация предложенного способа
Предыдущими примерами детально описаны возможные пути реализации предложенного способа. Еще раз перечислим эти примеры:
Пример N 1. Девять передающих камер с оптическими осями, расположенными веерообразно или параллельно друг другу (фиг. 3 и 4, соответственно). Циклограмма их работы показана на фиг. 9.
Пример N 3. Три камеры в группе. Все три группы расположены в одной плоскости (фиг. 6). Циклограмма их работы показана на фиг. 10.
Во всех вышеперечисленных примерах обеспечивается оглядыванием изображения только в азимутальной плоскости.
Пример N 4. Двадцать пять групп передающих камер (фиг. 7), по пять групп, расположенных на каждой из пяти конических поверхностях. Циклограмма их работы показана на фиг. 11 и 12.
Пример N 5. Девять групп камер по три камеры в группе (фиг. 8).
В двух последних примерах обеспечивается оглядывание как по азимуту, так и по вертикали.
Фиг. 5 отражает обобщенное устройство, поясняющее предложенный способ, в котором обозначены:
1 - блок наблюдения объекта,
2 - формирователь базового кадра,
3 - блок записи и/или передачи сформированного изображения,
4 - таймер,
5 - тюнер,
6 - декодер,
7 - воспроизводящий экран,
8 - координатор.
Реализуя предложенный способ, устройство работает следующим образом. Блок наблюдения (1) обеспечивает необходимое расположение передающих камер, цикличность из работы, а также выбор текущего базового ракурса. Формирователь базового кадра (2) преобразовывает сигналы, поступающие от выделенной группы передающих камер, в форму, показанную на фиг. 18 - 19. Эти сигналы в цифровой или аналоговой форме записываются или передаются по соответствующему каналу передачи с помощью блока записи и/или передачи (3). Работа передающей части системы ОТВ тактируется таймером (4).
Переданные сигналы восприниматься тюнером (5) в приемной части системы ОТВ, декодируются в декодере (6) с учетом координат зрителей, определяемых координатором (8) и воспроизводятся на экране (7).
Возможны различные варианты выполнения устройств, но как бы они не были выполнены, они обязательно будут содержать блоки, указанные на фиг. 5. Конкретная реализация отдельных блоков в настоящем описании не рассматривается.
На фиг. 20 показан воспроизводящий экран 7, выбранный автором как наиболее предпочтительный для реализации заявляемого способа. Экран 7 состоит из двух частей - светоинформационной матрицы 10 и обтюратора 11. В качестве светоинформационной матрицы 10 могут быть использованы обычные двумерные дисплеи: кинескоп, жидкокристаллическая панель, воспроизводимая панель на основе автоэмиссии, газодинамическая панель и т.д.. В качестве обтюратора 11 могут быть использованы: механический экран с движущимися вертикальными щелями, жидкокристаллическая или иная панель, выполненная с возможностью управления положением прозрачных вертикальных щелей на непрозрачном фоне.
В таком экране 7 каждый глаз зрителя (правый глаз 12 и левый глаз 13) будет видеть свой индивидуальный набор светоинформационных столбцов, на поверхности светоинформационной матрицы 10 сквозь щели обтюратора 11. Правый глаз 12 будет сквозь щели 17 (пунктирные линии на поверхности обтюратора 11) набор светоинформационных столбцов 15, а левый глаз 13 будет видеть сквозь щели 16 (сплошные линии 16 на поверхности обтюратора 11) набор светоинформационных столбцов 14. За время кадра светоинформационные столбцы 14 для левого глаза 13 зрителя и щели 16 обтюратора 11 пробегают все положения от первоначального до положения своего соседнего столбца (с теми же номерами 14 и 16, соответственно). За это же время светоинформационные столбцы 15 для правого глаза 12 зрителя и щели 17 обтюратора 11 пробегают все положения от первоначального до положения своего столбца (с теми же номерами 15 и 17, соответственно). При этом каждый глаз зрителя получит свою индивидуальную информацию, соответствующую своему местоположению.
При равномерном чередовании столбцов для левого 13 и правого 12 глаз зрителя, что удобно для осуществления кадровой развертки, на фиг. 27 показано взаимное расположение элементов воспроизводящего экрана 7, при его сечении горизонтальной плоскостью для пояснения преобразований по формулам 6 - 8.
Пусть в устройстве воспроизведения используется плоский воспроизводящий экран 7, выполненный, например, на основе жидких кристаллов [6]. Как уже упоминалось выше, этот экран можно представить состоящим из MxN прямоугольников. Пусть внутрь этого i-прямоугольника в точку Co(Xwo, Ywo, O) проецируется из базовой точки O (O, O, Zo) трехмерный элемент объемного изображения - точка W (Xw, Yw, Zw) (см. фиг. 24). Базовый кадр в совокупности передаваемый информации содержит координаты передаваемых элементов (точек), в том числе содержит координаты точки Co(Xwo, Ywo, O). Эта же точка W(Xw, Yw, Zw) при наблюдении ее из произвольной точки V(Xv, Yv, Zv) должна проецироваться в другое место экрана, в точку Cv(Xwv, Ywv, O). Ее смещение будет происходить вместе с другими точками i-го прямоугольника без изменения их взаимного расположения внутри i-го прямоугольника.
Преобразование координат точки Co в точку Cv осуществляют в соответствии с формулами 11 и 12.
Xwv = (ZvXwo(Zo-Zw) - XvZwZo/(Zo(Zv-Zw)) (11)
Ywv = (ZvXwo(Zo-Zw) - YvZwZo/(Zo(Zv-Zw)), (12)
где Xv, Yv и Zv - координаты одного зрачка зрителя (точки V);
Xwo и Ywo - координаты проекции точки W(Xw, Yw, Zw) из базовой точки O на информационный экран;
Xw, Yw, Zw - пространственные координаты точки W(Xw, Yw, Zw) объекта;
O, O, Zo - координаты базовой точки O.
Как указывалось выше, все точки внутри этого прямоугольника, включая точку W, получают одинаковое смещение, не меняя взаимного расположения внутри i-го прямоугольника, следовательно, точка W сместится на ту же величину, что и центр i-го прямоугольника, т.е. на величину Xwv - Xwo по горизонтальной оси и на величину Ywv - Ywo по вертикальной оси.
Отметим, что при преобразовании координат возможно экранирование i-м прямоугольником другого j-го прямоугольника, расположенного дальше от зрителя. На фиг. 28 этот факт отражен экранированием точки T (Xt, Yt, Zt), находящейся внутри j-го прямоугольника, которая была видна из базовой точки O и проецировалась в точку Cto.
Фиг. 25 поясняет процесс переноса точек как находящихся в пределах одного прямоугольника (точки P и Q не меняет своего взаимного расположения), так и находящихся в разных прямоугольниках (точки R и S меняют свое взаимное расположение после преобразования координат).
Нами был опробован ряд вариантов, в частности, изображенный в последовательности операций по фиг. 2. Размещение передающих камер было осуществлено в соответствии с фиг. 6 и 7. В качестве устройства воспроизведения 3 использовались кинескоп 10 с размером 51 см и обтюрационная панель на жидких кристаллах 11. Для этого случая были получены следующие результаты:
- процент правильного определения номера плана пикселей - 95%;
- обеспечена совместимость изображения с существующим стандартом PAL;
- угол оглядывания составил ± 5o как в азимутальном, так и вертикальном направлениях;
- искажения пропорций объекта при его воспроизведении не наблюдалось;
- изображения пейзажа записывались как на стандартную видеокассету (типа VHS), так и непосредственно в память компьютера типа IBM 486.
Таким образом, в результате предложенного технического решения достигается свойственное человеку восприятие объемного изображения с возможностью оглядывания объекта в широком угле обзора при плавном оглядывании и при отсутствии искажения пропорций и перспективы в изображении наблюдаемого объекта.
Кроме того, обеспечивается возможность записи объемных изображений и передачи их по обычным моноскопическим телевизионным каналам в том числе, по каналам стандартного телевизионного вещания.
В принципе, возможно управление объемным изображением и получение специфических эффектов, необходимых для решения задач конструирования, театра, а в будущем для создания интерактивных устройств в системе ОТВ.
По предварительным оценкам стоимость воспроизводящего устройства реализующего предложенный способ не должна превышать стандартного телевизионного приемника больше чем в 2 - 2,5 раза.
Источники информации
1. Robinson Ph. Stereo 3D Systems Computer Graphics World, 1990, v. 13, N 6, p. 68-70, p. 73 - 74.
2. Китамура Хироюки, Инадзаки Кэндзо; Сяпу К.К. - Заявка 6473891, Япония, МКИ G 03 B 35/16; Заявл 87.09.14; N 62-230351.
3. Omura K. , Tetsutany N., Kisino F. Lenticular stereoscopic display sistem with eye-position tracking and without special-equipment needs. SID 94 Digest, p. 187-190, 1994.
4. T. Kanai. Head-Driven Pointing Device, Fujitsu LTD, патент Японии N 6-187092 (A) 8.7.1994, Int. Cl. G 06 F 3/033.
5. Tetsutany N. Nagashima Y., Tomono A., Kisino F. Stereoscopic display method employing eye-position tracking. Proc. of International Symp. on 3D Techs and Arts (Totyo), p. 101-107, 1992.
6. J.Eichenlaub at all "DTI's Autostereoscopic Display Technology" SPIE, v. 1915, Stereoscopic Display & Application IV (1993), p. 178.
7. Travis D.S. Three dimention display apparatus, Патент Великобритании, N 2206763, Кл. МКИ H 04 N 13/04, Кл. НКИ H 4 F.
8. Otsubo M. Прибор для воспроизведения объемного изображения, патент Японии, N 4-339599, МКИ H 04 N 13/04, публ. 07.06.94.
9. Y. Takahashi. Трехмерный дисплей, Nippon Telegr. & Teleph. Corp. (NTT), патент Японии N 5-83746 (A), 02.04.93, Int Cl. H 04 N 13/00. Ка

Изобретение относится к области телевизионной техники, а именно к телевизионным системам, в которых формируется, передается и воспроизводится объемное изображение объектов. Техническим результатом предложенного решения является достижимость свойственного человеку восприятия объемного изображения при воспроизведении, обеспечение возможности передачи объемных изображений по обычным телевизионным каналам и каналам связи, совместимость сформированных сигналов объемного изображения со стандартными сигналами телевизионного вещания, возможность записи объемного изображения. Указанный технический результат достигается особым размещением передающих камер при наблюдении ракурсов, получением специфической структуры тактированных видеосигналов в виде единого базового кадра, в котором учитывается расположение элементов наблюдаемого объекта в пространстве; особым воспроизведением изображения, когда положение каждого воспроизводимого пикселя определяется как записанной дальностью элемента в базовом кадре, так и положением глаз зрителя. Рассмотрены варианты размещения передающих камер, связь между их размещением и параметрами телевизионных разверток, алгоритм преобразования изображений ракурсов из базового кадра и связь преобразованных сигналов изображений ракурсов с развертками экрана, воспроизводящего объемное оптическое изображение. Состояние современной техники позволяет реализовать предложенный способ. 8 з.п. ф-лы, 25 ил.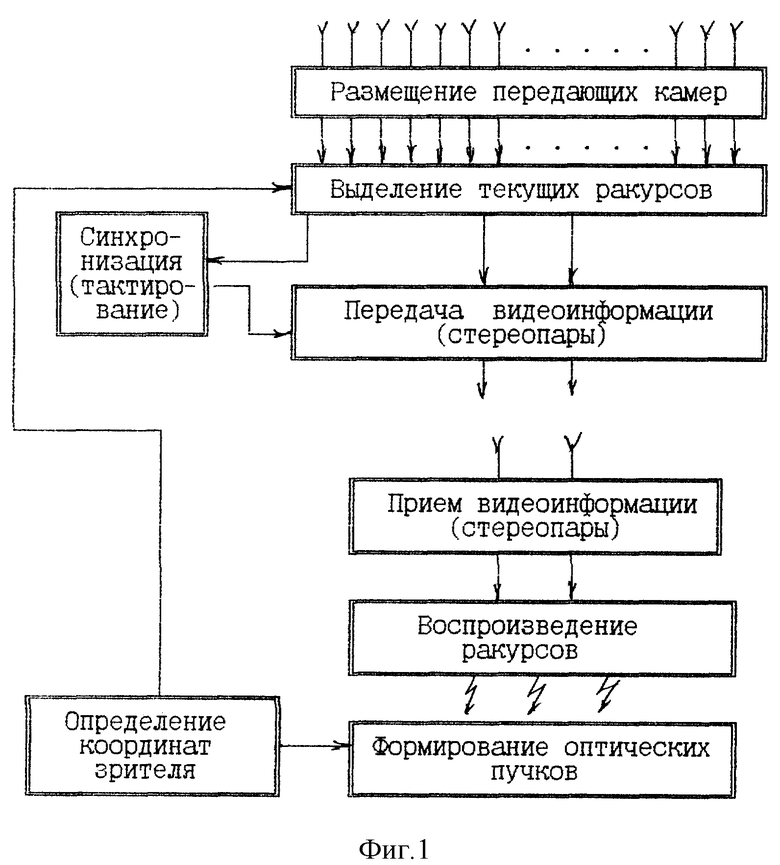
δ = (B/Lo= D/h (радиан),
ε/θ = t1/tвк,
β/ϕ = (tox-T)/tпx
где B - расстояние между глазами зрителя, м;
L0 - заданное стандартное расстояние от центра экрана воспроизводящего устройства до базовой точки 0, выбранной в зоне наблюдения изображения, м;
D - расстояние между центрами зрачков передающих камер, м;
L - расстояние от передающих камер до точки А, м;
δ - угол конвергенции (угол между оптическими осями соседних камер), рад;
ε - угол оглядывания по вертикали, рад;
θ - угол обзора камеры по вертикали, рад;
β - угол оглядывания по азимуту, рад;
ϕ - угол, под которым камера видит объект по азимуту, рад;
T - часть времени обратного хода строчной развертки, занятой служебными сигналами, с;
t1 - время кадровой развертки, не занятое видеоинформацией в стандартном телевизионном кадре, с;
tвк - время кадровой развертки, занятое воспроизводством в стандартном телевизионном кадре, с;
tох - время обратного хода строчной развертки, с;
tпх - время прямого хода строчной развертки, с.
расстояние между щелями в паре
Δ = 2•(Zv•d-lo•B)/(Zv+lo),
смещение центра рабочей зоны обтюрационной панели (XV0) при перемещении зрителя по горизонтали
Xvo= lo•tgαo,
где Xj - горизонтальная координата j-го светоинформационного столбца, м;
l0 - расстояние между информационной матрицей и обтюрационной панелью, м;
d - шаг развертки информационной матрицы, м;
XV, ZV - азимутальная координата и дальность зрителя, соответственно, м;
2B = 64 мм - расстояние между глазами зрителя;
αj - горизонтальная компонента текущего пространственного угла между глазом зрителя и j-й вертикальной бегущей щелью, имеющей на обтюрационной панели координаты (Xj, l0), рад;
αo - горизонтальная компонента пространственного угла между осью Z и прямой, соединяющей переносицу зрителя с центром обтюрационной панели, рад.
XWV = (ZVXW0(Z0 - ZW) - XVZWZ0) / (Z0(ZV - ZW))
YWV = (ZVYW0(Z0 - ZW) - YVZWZ0) / (Z0(ZV - ZW))
где XV, YV, ZV - координаты одного зрачка зрителя (точки V);
XW0, YW0 - координаты проекции точки W(XW, YW, ZW) из базовой точки 0 на информационный экран;
0, 0, Z0 - координаты базовой точки 0.
| EP 0665697 A2, 02.08.1995 | |||
| Стереоскопическая телевизионная система | 1990 |
|
SU1787315A3 |
| Направитель ткани | 1949 |
|
SU84167A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ОБЪЕМНОГО ИЗОБРАЖЕНИЯ | 1993 |
|
RU2096925C1 |
| СПОСОБ ПЕРЕДАЧИ И ВОСПРОИЗВЕДЕНИЯ ОБЪЕМНОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2092978C1 |
| КОМПОЗИЦИЯ ДЛЯ ТЕПЛОИЗОЛЯЦИОННОГО ПЕНОПЛАСТА | 1990 |
|
RU2022978C1 |
