Изобретение относится к области вибрационной техники и технологии. Вибраторы используют в устройствах для получения механических колебаний, применяемых в различных вибротехнологиях, например, при транспортировке по желобам или трубам сыпучих или кусковых материалов, для создания вибраций в жидкой среде.
Резонансные вибраторы позволяют обеспечивать наиболее эффективное преобразование потребляемой вибратором энергии в энергию механических колебаний. Резонансный вибратор обычно содержит механический колебательный контур, состоящий из упругого элемента (пружины) и инертной массы, и источник силы, периодически повторяющейся с частотой колебательного контура или в несколько раз меньшей частотой. В качестве источника периодически повторяющейся силы применяют устройства пневматического, гидравлического или электромагнитного типа (электромагниты, электрические машины, магнитострикторы, пьезоэлектрические преобразователи и т. д.) [1].
Известен резонансный вибратор [2, с. 65, рис. 27], содержащий электромагнитный источник периодически повторяющейся силы, плиту, основание и упругие элементы. Электромагнитный источник силы состоит из статора, содержащего ферромагнитный сердечник и катушку, и ферромагнитного якоря. Статор жестко соединен с плитой, а якорь жестко соединен с основанием. Плита и основание соединены друг с другом упругими элементами, которые выполнены в виде двух цилиндрических пружин. К основанию пружины крепятся двумя неподвижными пробками. Число рабочих витков, а стало быть жесткость пружин и собственную частоту колебаний вибратора, регулируют ввинчиванием или вывинчиванием двух подвижных пробок, положение которых фиксируют гайками.
При подключении катушки к источнику переменного тока возникает переменный магнитный поток, который проходит по сердечнику и якорю и создает электромагнитную силу. Якорь притягивается к сердечнику. В исходное положение якорь и основание возвращаются под действием пружин.
Признаками рассматриваемого аналога, совпадающими с существенными признаками заявляемого изобретения, являются наличие источника периодически повторяющейся силы, жесткого корпуса (плиты) и подвижной относительно корпуса инертной массы (основания). Корпус и инертная масса соединены друг с другом упругими элементами (пружинами).
Для осуществления резонансного режима работы необходима индивидуальная настройка вибратора на заданные условия [2, с. 61]. В вибраторах, изготовленных даже в условиях крупносерийного производства, неизбежны отклонения массы литых элементов и т.д. Поэтому фактические параметры вибратора никогда не соответствуют расчетным. Это прежде всего справедливо в отношении наиболее чувствительного параметра - частоты собственных (свободных) колебаний W0, в формировании которого участвуют масса и жесткость колебательной системы. Поэтому в конструкции вибратора предусматривают возможность регулирования либо массы, либо жесткости. Регулирование жесткости пружин рассматриваемого аналога путем ввинчивания или вывинчивания двух подвижных пробок требует обязательной остановки вибратора, что снижает эффективность управления вибратором. Особенную важность регулирование частоты собственных колебаний вибратора приобретает в виброконвейерах со многими вибраторами, которые должны работать синхронно и синфазно друг с другом. В этой системе необходимость регулировки жесткости пружин только одного из вибраторов связана с остановкой работы всех других вибраторов.
Отклонение частоты собственных колебаний только из-за допускаемых отклонениий в размерах цилиндрических пружин равняется ±10%. Отклонения массы и погрешности монтажа при неблагоприятном совпадении знаков погрешностей могут вызвать средние суммарные погрешности в частоте 10%. Сортировка упругих элементов по группам отклонений снижает отклонение частоты W0 от номинала в 4-5 раз, но вызывает трудности в производстве.
Наиболее близким к заявляемому устройству является однотактный вибратор [2, с. 8, рис. 1], который содержит электромагнитный источник периодической силы, размещенный внутри корпуса, и упругую систему из двух пар витых цилиндрических пружин. Электромагнитный источник силы состоит из статора, жестко соединенного с корпусом, и ферромагнитного якоря, закрепленного между пружинами. Пружины поджимаются шпильками с помощью гаек и контргаек. Катушка (обмотка возбуждения) электромагнита питается через клеммы и токонесущие бронзовые пружины. Якорь электромагнита представляет собой подвижную относительно корпуса инертную массу. По катушке пропускают переменный или однополупериодный электрический ток [2, с. 70], который создает электромагнитную силу, притягивающую якорь к статору. В исходное положение якорь возвращается под действием пружин. При работе вибратора якорь и корпус вместе со статором совершают колебательные движения. Корпус вибратора соединен с рабочим органом. При совпадении собственной частоты колебательной системы вибратор-рабочий орган-нагрузка с частотой электромагнитной силы возникает резонансный режим работы.
Признаками рассматриваемого аналога, совпадающими с существенными признаками заявляемого изобретения, являются наличие источника периодически повторяющейся силы (электромагнита), жесткого корпуса, подвижной относительно корпуса инертной массы, функцию которой выполняет якорь электромагнита, и механических пружин, которые соединяют инертную массу и корпус вибратора.
Существенными недостатками такого вибратора является нерегулируемость частоты собственных колебаний системы вибратор-рабочий орган-нагрузка и низкая стабильность параметров. Изменение массы нагрузки приводит к изменению частоты собственных колебаний системы, а значит, и к нарушению условий резонанса.
Задачей, на решение которой направлено изобретение, является повышение эффективности управления вибратором, в частности, настройки его на близкий к резонансу режим работы, в том числе настройки на синфазный режим работы группы вибраторов, работающих на общую нагрузку.
Техническим результатом достижения этой задачи является повышение эффективности обеспечиваемого вибратором или группой вибраторов технологического процесса, повышение срока службы вибраторов и снижение эксплуатационных расходов.
Упомянутая задача достигается тем, что резонансный вибратор содержит жесткий корпус, подвижную относительно корпуса инертную массу, соединяющие их механические пружины и источник периодически повторяющейся силы. От наиболее близкого аналога заявляемое устройство отличается тем, что вибратор содержит дополнительный электромагнит, выполненный в виде двух цилиндрических соосных магнитопроводов с зазором между сопрягающимися поверхностями. Один из магнитопроводов жестко присоединен к корпусу, а другой магнитопровод - к инертной массе. Посередине высоты H сопрягающихся поверхностей выполнены пазы шириной а, образующие на каждом магнитопроводе два полюса шириной b = (H-a)/2. Ширина полюсов больше максимального относительного перемещения магнитопроводов в аксиальном направлении. В одном из пазов помещена обмотка возбуждения постоянного тока.
На полюсах магнитопроводов могут быть выполнены проточки, образующие друг против друга зубцы шириной в аксиальном направлении меньше расстояния между ними и больше амплитуды колебаний одного магнитопровода относительно другого.
Обмотка возбуждения постоянного тока может быть подключена к источнику постоянного напряжения через реактор.
Дополнительный электромагнит выполняет роль магнитной пружины с регулируемой жесткостью, что обеспечивает возможность настройки вибратора на близкий к резонансному режим работы и за счет этого повышение эффективности технологического процесса.
Выполнение зубцов на полюсах магнитной пружины позволяет пропорционально числу зубцов повысить развиваемую между магнитопроводами электромагнитную силу и снизить отношение потребляемой обмоткой постоянного тока мощности к максимальной энергии магнитной пружины, повысить электромагнитную мощность магнитной пружины.
Дополнительные возможности повышения удельной электромагнитной мощности магнитной пружины достигаются при присоединении обмотки постоянного тока к источнику постоянного напряжения через реактор. При этом расширяются возможности регулировки жесткости магнитной пружины путем изменения индуктивности реактора.
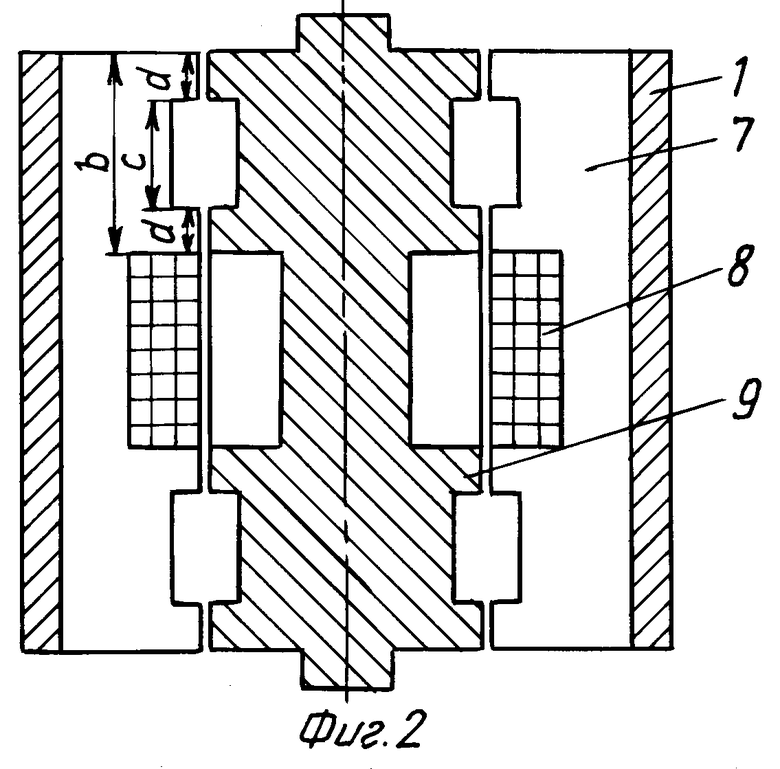
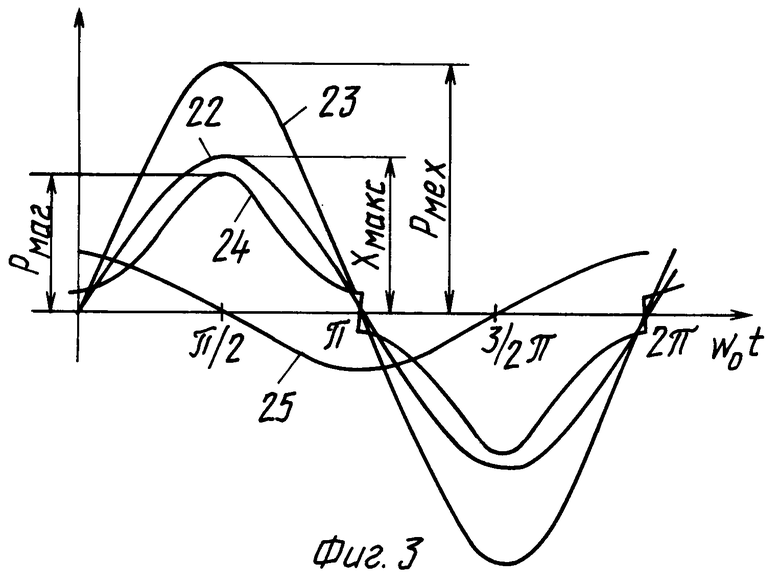
На фиг. 1 изображена конструктивная схема резонансного вибратора с дополнительным электромагнитом - магнитной пружиной; на фиг. 2 - конструктивная схема магнитной пружины, на магнитопроводах которой выполнены проточки, образующие расположенные друг против друга зубцы шириной d, расстояние между зубцами равно c; на фиг.3 приведены временные диаграммы сил, развиваемых механической и магнитной пружинами резонансного вибратора, а также временные диаграммы относительных скоростей и перемещений магнитопроводов магнитной пружины при работе вибратора.
Резонансный вибратор (фиг.1) содержит жесткий цилиндрический корпус 1, подвижный относительно корпуса элемент (инертную массу) 2 и механические пружины 3. Источник периодически повторяющейся силы является электромагнитным и состоит из жестко соединенного с корпусом первого магнитопровода 4, двух секций обмотки возбуждения 5 и второго магнитопровода (ферромагнитного якоря) 6, жестко соединенного с инертной массой 2. Вибратор оснащен дополнительным электромагнитом, содержащим первый цилиндрический магнитопровод 7, жестко соединенный с корпусом 1. В пазу магнитопровода помещена обмотка возбуждения постоянного тока 8. Соосно с первым магнитопроводом 7 установлен второй магнитопровод (ферромагнитный якорь) 9 с пазом на внешней поверхности, сопряженной с внутренней цилиндрической поверхностью магнитопровода 7. Своей нижней частью якорь 9 жестко соединен с механическими пружинами 3 рессорного типа, расположенными в нижней части корпуса 1, а своей верхней частью жестко соединен с инертной массой 2. Верхняя часть якоря 6 жестко соединена с механическими пружинами 3 рессорного типа, расположенными в верхней части корпуса 1, а нижняя часть жестко соединена с инертной массой 2. Якоря 6 и 9 крепятся к пружинам 3 с помощью гаек 10. Между нижней механической пружиной 3 и магнитопроводом 7, между магнитопроводами 4 и 7, а также между верхней пружиной 3 и магнитопроводом 4 установлены опорные кольца 11, 12 и 13. Сверху к корпусу 1 с помощью болтов (на фиг.1 не показаны) крепится крышка 14. Между крышкой и корпусом установлена прокладка 15 из упругого материала, например, резины. Между элементами верхней и нижней пружин 3 установлены жесткие кольца 16 и 17. Снизу к корпусу 1 с помощью винтов (на фиг.1 не показаны) крепится основание 18. Секции обмотки 5 присоединены к источнику питания 19, а обмотка 8 присоединена к источнику постоянного напряжения 20 напрямую или через реактор 21. Размеры H, a, b связаны соотношением b = 0,5 (H-a), где размер b должен быть больше максимального относительного перемещения магнитопроводов 7 и 9.
При выполнении на полюсах магнитопроводов 7 и 9 проточек, образующих зубцы, (фиг. 2) размер d зубцов должен быть меньше размера C между зубцами и больше максимального относительного перемещения магнитопроводов 4 и 6, 7 и 9 в аксиальном направлении, показанном кривой 22 на фиг.3. Кривая 23, выражающая зависимость силы деформации механической пружины 3 от времени, имеет, как и кривая 22, синусоидальную форму. Кривая 24 выражает зависимость силы, возникающей между магнитопроводами 7 и 9 магнитной пружины. Кривая 25 выражает зависимость скорости инертной массы 2 и якорей 6 и 9 от времени. На фиг.3 приняты следующие обозначения:
W0 - частота собственных колебаний;
t - время;
Xмакс- максимальное относительное перемещение магнитопроводов 4 и 6; 7 и 9;
Pмех - максимальное значение силы деформации механической пружины;
Pмаг - максимальное значение силы магнитной пружины.
Заявляемый резонансный вибратор работает следующим образом. По обмотке 8 от источника постоянного напряжения 20 пропускают постоянный ток I н, а по двум секциям обмотки 5 поочередно пропускают импульсы тока от источника питания 19. Под воздействием знакопеременной силы, возникающей между магнитопроводом 4 и якорем 6, возбуждаются колебания инертной массы 2, жестко связанной с якорями 6 и 9, относительно магнитопроводов 4 и 7 и корпуса 1, жестко прикрепленного к рабочему органу (нагрузке). Колебания корпуса 1 передаются нагрузке, например, трубе с сыпучим материалом, обеспечивая ее вибрацию. Отметим, что колеблются относительно друг друга корпус 1 с магнитопроводами 4 и 7 и инертная масса 2 с якорями 6 и 9. Силы, действующие между частями вибратора, являются внутренними. Из теоретической механики известно, что в этом случае центр масс системы при взаимном перемещении ее частей остается неподвижным. Большее перемещение будет иметь та часть системы, которая обладает меньшей массой. Поэтому, чтобы увеличить амплитуду колебаний корпуса, магнитопроводов и рабочего органа относительно центра масс, с одной стороны, и уменьшить амплитуду колебаний якорей относительно того же центра масс, с другой стороны, к якорям 6 и 9 присоединен дополнительный элемент - инертная масса 2.
Развиваемая между полюсами магнитопроводов 7 и 9 электромагнитная сила направлена согласно с силой деформации механической пружины 3. Эти силы противодействуют силе, развиваемой источником периодически повторяющейся силы, и стремятся вернуть якорь 9 в исходное положение.
Собственная частота колебаний механической колебательной системы определяется движущимися массами и жесткостью механической и магнитной пружин
где mэ - эквивалентная масса вибратора:
Kэ - эквивалентная жесткость вибратора.
Эквивалентная масса вибратора определяется массами частей вибратора и нагрузки
где m1 - масса корпуса 1 и магнитопроводов 4 и 7;
m2 - масса нагрузки;
m3 - масса якорей 6 и 9 и элемента 2.
Эквивалентная жесткость вибратора
Kэ=K1+K2(3)
где K1 - жесткость механической пружины;
K2 - жесткость магнитной пружины.
Жесткость магнитной пружины зависит от силы тока Iн в обмотке 8 и индуктивности Ld реактора 21.
где Lн - начальная индуктивность обмотки при симметричном расположении якоря 9 относительно магнитопровода 7;
x - перемещение инертной массы и якорей относительно корпуса (кривая 22 на фиг. 3).
Развиваемая магнитной пружиной сила может быть найдена по формуле:
Результирующая сила, развиваемая упругой системой вибратора, определяется суммой сил механической и магнитной пружин (суммой кривых 23 и 24 на фиг. 3).
Для настройки вибратора на резонансный режим работы необходимо обеспечить такое значение жесткости Kэ упругой системы, при которой частота W0 будет близка к частоте возбуждения вибратора источником периодически повторяющейся силы. Необходимое изменение жесткости обеспечивается изменением тока Iн в обмотке 8. В соответствии с формулой (4) жесткость K2 зависит от Iн. Жесткость K2 может изменяться также путем изменения индуктивности Ld реактора 21. Для регулирования жесткости K2 и, следовательно, эквивалентной жесткости упругой системы вибратора могут использоваться оба способа - регулирование Iн и регулирование Ld.
Выполнение полюсов зубчатыми (фиг. 2) позволяет пропорционально числу зубцов на полюсе шириной b увеличить развиваемую магнитной пружиной силу при той же самой намагничивающей силе, развиваемой обмоткой возбуждения 8. Ширина зубца d при этом должна превышать амплитуду перемещения инертной массы и якорей относительно корпуса, а расстояние C между зубцами должно быть больше ширины зубцов.
Вибратор может быть выполнен без включения реактора 21 последовательно с обмоткой 8. В этом случае Ld = 0, размер b полюса на фиг.1 и размер d зубцов на фиг. 2 в два раза превышают амплитуду перемещений инертной массы и якорей относительно корпуса, что связано с некоторым увеличением массы магнитопроводов 7 и 9 с обмоткой возбуждения 8.
Обеспечение резонансного режима работы нескольких вибраторов, работающих на общую механическую нагрузку, например, при установке нескольких вибраторов на трубе для обеспечения перемещения по ней сыпучего материала, позволяет снизить потребляемую вибраторами мощность за счет повышения синфазности их работы и повысить эффективность вибротранспортировки сыпучего материала.
Возможность настройки вибраторов на резонансный режим работы без их остановки обеспечивает повышение эффективности вибротехнологического процесса и снижение эксплуатационных расходов.
Необходимое для резонансного режима работы значение тока Iн в обмотке 8 магнитной пружины может устанавливаться автоматически с помощью блока регулирования напряжения источника постоянного напряжения 20 по определенному закону, например, по потреблению вибратором реактивной мощности, поскольку при резонансном режиме потребляемая реактивная мощность минимальна.
Потери мощности в обмотке 8 и магнитопроводах 7 и 9 снижают добротность вибратора, что расширяет его амплитудно-частотную характеристику и обеспечивает более устойчивую работу при отключении собственной частоты колебаний от резонансной.
Использованная литература
1. Вибрации в технике: Справочник в 6-ти т. - М.: Машиностроение, 1981, т. 4. Вибрационные процессы и машины./ Под ред.Э.Э.Лавендела, 1981 - 509с.
2. Хвингия М. В. Динамика и прочность вибрационных машин с электромагнитным возбуждением. - М.: Машиностроение, 1980. - 144с.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЗОНАНСНЫЙ ВИБРАТОР | 1999 |
|
RU2177840C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД РЕЗОНАНСНОГО ВИБРАТОРА | 1998 |
|
RU2146412C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ВИБРАТОР КРУТИЛЬНЫХ КОЛЕБАНИЙ | 2011 |
|
RU2466800C1 |
| ИМПУЛЬСНЫЙ ЭЛЕКТРОМАГНИТНЫЙ ИСТОЧНИК СЕЙСМИЧЕСКИХ ВОЛН | 2011 |
|
RU2466429C1 |
| ИМПУЛЬСНЫЙ НЕВЗРЫВНОЙ НАЗЕМНЫЙ СЕЙСМОИСТОЧНИК | 2003 |
|
RU2233000C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ ГРУНТА ИЗЛУЧАЮЩЕЙ ПЛИТОЙ-АНТЕННОЙ ИМПУЛЬСНОГО СЕЙСМОИСТОЧНИКА С ЭЛЕКТРОМАГНИТНЫМ ПРИВОДОМ | 2005 |
|
RU2265234C1 |
| ИМПУЛЬСНЫЙ НЕВЗРЫВНОЙ СЕЙСМОИСТОЧНИК | 2009 |
|
RU2453870C2 |
| НЕВЗРЫВНОЙ СЕЙСМОИСТОЧНИК С ЭЛЕКТРОМАГНИТНЫМ ПРИВОДОМ | 2003 |
|
RU2242027C1 |
| НАЗЕМНЫЙ ЭЛЕКТРОМАГНИТНЫЙ ВИБРАЦИОННЫЙ СЕЙСМОИСТОЧНИК | 2004 |
|
RU2253136C1 |
| НЕВЗРЫВНОЙ ИМПУЛЬСНЫЙ НАЗЕМНЫЙ СЕЙСМОИСТОЧНИК С ИНДУКЦИОННО-ДИНАМИЧЕСКИМ ПРИВОДОМ | 2012 |
|
RU2522143C2 |
Резонансный вибратор содержит жесткий корпус, источник периодически повторяющейся силы для возбуждения вибрации, например, электромагнит инертную массу и механические пружины, дополнительный электромагнит, выполненный в виде двух цилиндрических соосных магнитопроводов. Один из магнитопроводов жестко соединен с корпусом, а другой - с инертной массой. Посредине высоты сопрягающихся цилиндрических поверхностей магнитопроводов выполнены пазы, образующие два крайних полюса шириной больше максимального относительного перемещения магнитопроводов при работе вибратора. В одном из пазов помещена обмотка возбуждения, присоединенная к источнику регулируемого постоянного напряжения. При относительном перемещении магнитопроводов дополнительного электромагнита между ними возникает противодействующая электромагнитная сила, величину которой можно регулировать, регулируя ток в обмотке возбуждения. Дополнительный электромагнит выполняет роль магнитной пружины с регулируемой жесткостью, что позволяет путем изменения тока в его обмотке возбуждения обеспечить эффективный, близкий к резонансному режим работы при изменении нагрузки вибратора. Полюса дополнительного электромагнита могут быть выполнены зубчатыми с шириной зубцов больше амплитуды относительного перемещения магнитопроводов и больше амплитуды колебания одного магнитопровода относительно другого. Обмотка возбуждения постоянного тока дополнительного электромагнита присоединена к источнику регулируемого постоянного напряжения через реактор. 2 з.п.ф-лы, 3 ил.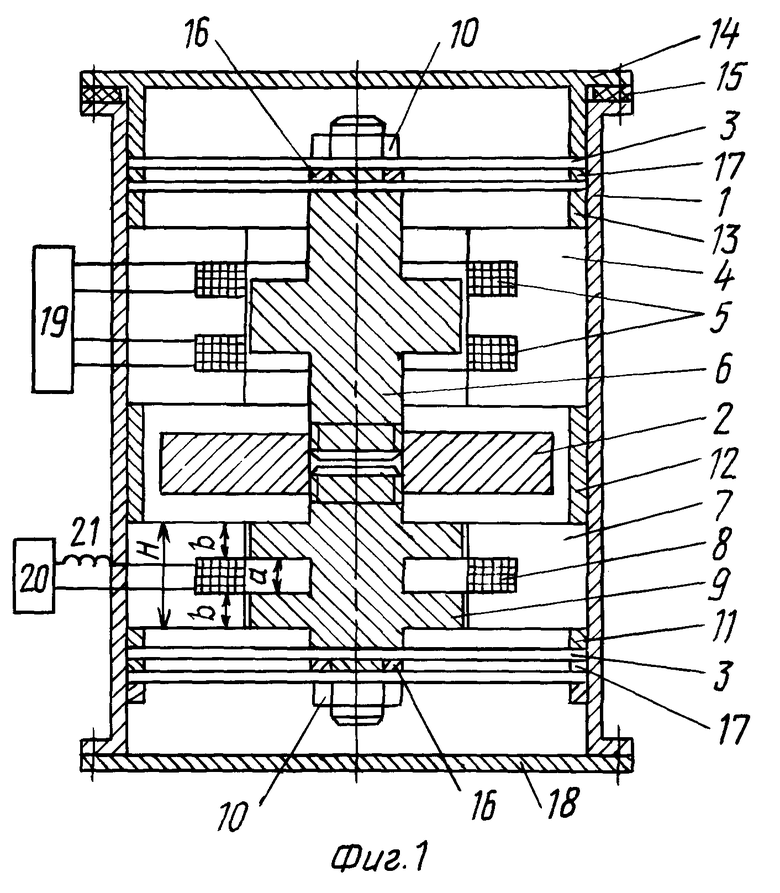
| ХВИНГИЯ М.В | |||
| Динамика и прочность вибрационных машин с электромагнитным возбуждением | |||
| - М.: Машиностроение, 1980, с.8, рис.11 | |||
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРАТОР | 0 |
|
SU213390A1 |
| Электромагнитная компенсация веса подвижной системы электродинамического вибрационного стенда | 1957 |
|
SU112649A1 |
| СПОСОБ ПЕРЕРАБОТКИ ОТРАБОТАННЫХ КОНЦЕНТРИРОВАННЫХ МЕДЬАММИАЧНЫХ РАСТВОРОВ | 1996 |
|
RU2115619C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ САХАРИСТОСТИ САХАРНОЙ СВЕКЛЫ | 1998 |
|
RU2158499C2 |
