Изобретение относится к сотовым системам связи. Более конкретно настоящее изобретение относится к способу и системе для управления командой требования измерения пилот-сигнала (КТИПС).
Как известно в технике, сотовая система мобильной связи делит всю область обслуживания на множество зон, обслуживаемых базовыми приемопередающими станциями (БПС), которые включают области меньшего размера или ячейки. Сотовая система связи управляет каждой БПС, используя коммутационную систему, таким образом предоставляя возможность пользователям, перемещающимся между ячейками, поддерживать связь с БПС. Процедура переключения каналов связи в сотовой системе связи позволяет не прерывать вызов в то время, когда мобильная станция переходит из ячейки, относящейся к обслуживающей БПС, в ячейку соседней БПС.
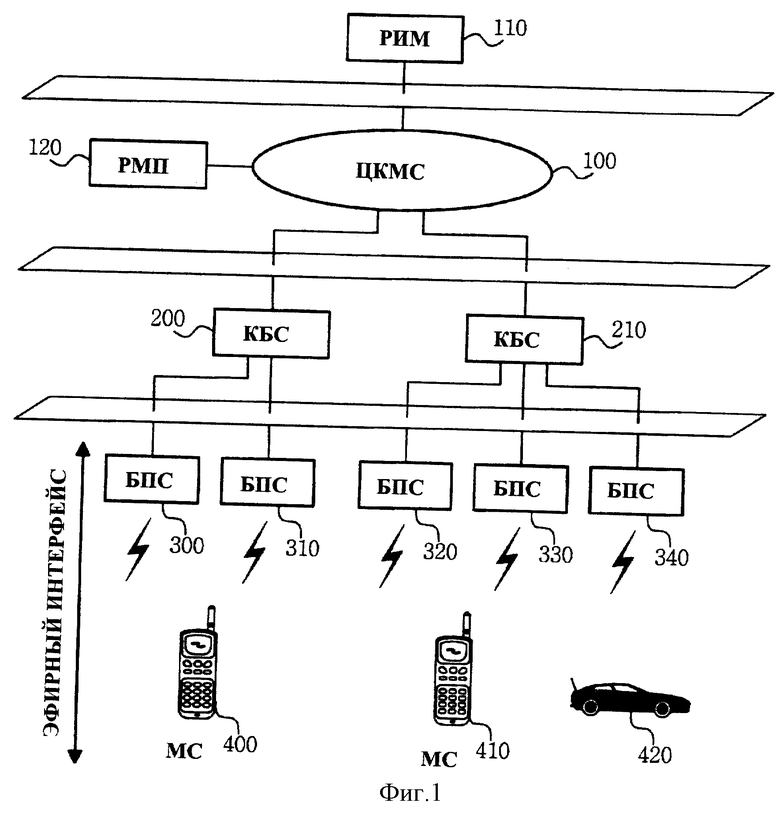
На фиг.1 показана структура сотовой системы связи, использующей типичную технику систем множественного доступа с кодовым разделением каналов (МДКР). Как показано на фиг. 1, сотовая система связи включает в себя множество мобильных станций 400, 410 и 420, множество базовых приемопередающих станций (БПС) 310, 320, 330 и 340, обеспечивающих обслуживание связи с мобильными станциями, множество контроллеров базовых станций (КБС) 200 и 210 для управления БПС и центр коммутации мобильной связи (ЦКМС) 100, соединяющий КБС с коммутируемой телефонной сетью общего пользования (КТСОП).
ЦКМС 100 получает информацию о мобильных станциях 400, 410 и 420 от регистра исходного местоположения (РИМ) 110 и регистра местоположения посетителя (РМП) 120 и обеспечивает обслуживание связи.
Система МДКР обеспечивает различные типы процедур 1 переключения каналов связи для поддержки вызова при перемещении пользователя из одной зоны обслуживания в другую. В частности, при одном из способов мобильная станция соединяется одновременно с множеством базовых приемопередающих станций. Такой тип процедуры переключения каналов связи определяется как "процедура гибкого переключения каналов связи". Типичный способ гибкого переключения каналов связи рассматривается в патенте США N 5640414 на "Способ гибкого переключения каналов связи с помощью мобильной станции в сотовой системе связи МДКР".
В соответствии с обычным способом гибкого переключения каналов связи БПС измеряет уровень принимаемого мобильной станцией сигнала во время связи с БПС и контролирует, падает ли измеренный уровень сигнала ниже предварительно определенного порогового значения. Когда уровень принимаемого сигнала падает ниже предварительно определенного порогового значения, БПС принимает решение, что мобильная станция располагается на границе ячейки или около нее, и информирует об этом контроллер базовой станции (КБС) центра коммутации мобильной связи (ЦКМС), таким образом побуждая КБС осуществить проверку, не принимает ли соседняя БПС более сильный сигнал от этой мобильной станции.
Когда уровень сигнала мобильной станции, принимаемый соседней БПС, превышает предварительно определенное пороговое значение, КБС передает от данной мобильной станции сообщение соседней БПС, запрашивающее процедуру переключения каналов связи, и направляет мобильной станции команду связаться с соседней БПС для выполнения процедуры переключения каналов связи к соседней БПС.
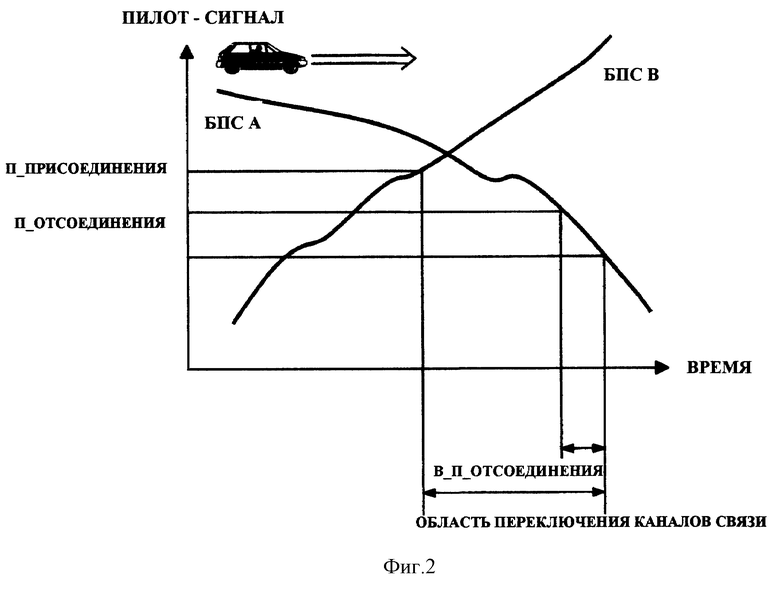
Фиг. 2 иллюстрирует типичную процедуру "гибкого переключения каналов связи". Когда мобильная станция перемещается из области, управляемой базовой приемопередающей станцией (БПС) А, в область, управляемую БПС В, мощность пилот-сигнала БПС А (Ec/Io) становится слабее, но усиливается пилот-сигнал БПС В.
Поскольку мощность принимаемого пилот-сигнала БПС В возрастает, она в конечном счете превысит предварительно определенное пороговое значение П_ Присоединения, и тогда мобильная станция передает КБС сообщение об измерении мощности пилот-сигнала (СИМПС) с информацией о возрастании мощности пилот-сигнала БПС В.
КБС выдает подтверждение, что БПС В зарегистрирована в списке соседних с БПС А и направляет команду мобильной станции на выполнение процедуры переключения каналов связи. Это означает, что процедура переключения каналов связи инициализируется командой КБС. Данный процесс определяется как "присоединение". В это время мобильная станция находится одновременно связанной с БПС А и БПС В.
Когда мобильная станция перемещается ближе к БПС В, мощность пилот-сигнала БПС А падает ниже предварительно определенного порогового значения П_Отсоединения. Если мощность пилот-сигнала непрерывно удерживается ниже порога П_Отсоединения в течение предварительно определенного периода времени В П_ Отсоединения, мобильная станция подает запрос на отсоединение от БПС А. Этот процесс определяется как "отсоединение". Область действия процедуры переключения каналов связи находится между точкой, где пилот-сигнал БПС В превышает порог П_ Присоединения, и местом, где пилот-сигнал БПС А непрерывно находится ниже, чем П_Отсоединения в течение периода времени В П_Отсоединения.
В центре города, где ячейки перекрываются в значительной степени, если происходит сбой в обслуживании ячейки базовой приемопередающей станцией, БПС не генерирует пилот-сигнала. Как следствие, мобильная станция принимает пилот-сигнал соседней БПС и передает сообщение КБС о мощности нового принятого пилот-сигнала. КБС не дает команду на выполнение процедуры переключения каналов связи, если указанная в сообщении БПС не зарегистрирована в списке соседних БПС.
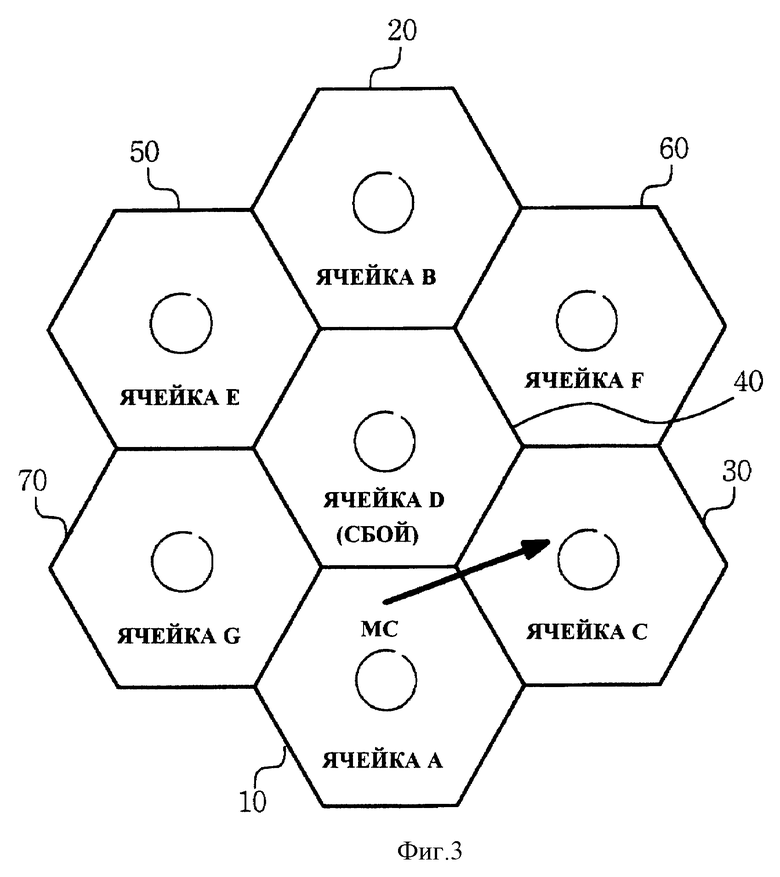
Фиг. 3 иллюстрирует типичное передвижение мобильной станции, перемещающейся внутри многоячеистой структуры. Предположим, например, что сбой происходит в БПС D, которая поддерживает ячейку D 40. Как следствие сбоя, мобильная станция, которая в данное время обслуживается БПС А, не принимает пилот-сигнал от БПС D, но вместо этого принимает пилот-сигнал от других базовых приемопередающих станций.
Например, рассматриваемая мобильная станция принимает пилот-сигнал БПС В и направляет контроллеру базовой станции СИМПС, включающее информацию о пилот-сигнале БПС В. Однако, поскольку БПС В не зарегистрирована в списке базовых станций, соседних с БПС А, мобильная станция не получает от КБС команду на выполнение процедуры переключения каналов связи.
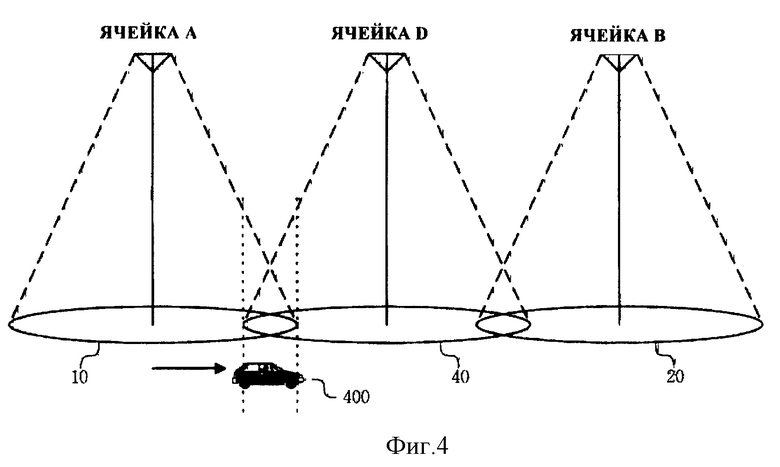
Фиг. 4 иллюстрирует нормальное действие процедуры переключения каналов связи в соответствии с предшествующим уровнем техники. Как показано на чертеже, поскольку ячейка D работает нормально, мобильная станция 400 в области, перекрытой ячейками А 10 и D 40, одновременно взаимодействует с БПС А и БПС D.
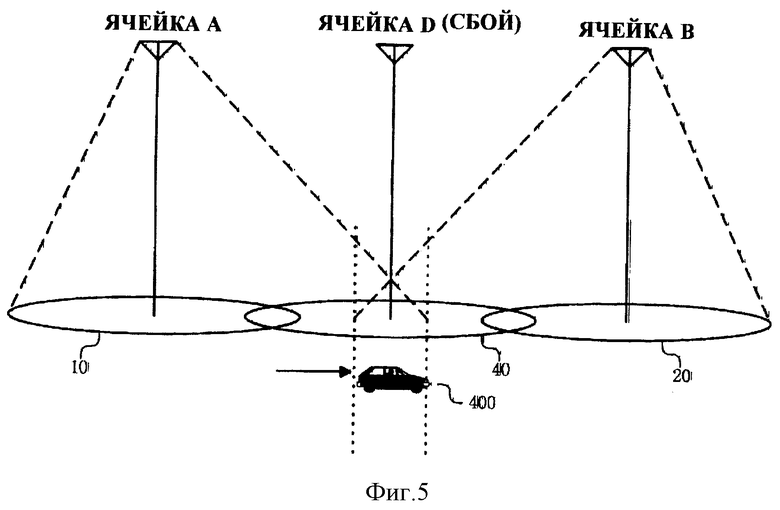
Фиг. 5 иллюстрирует аномальное действие процедуры переключения каналов связи в соответствии с предшествующим уровнем техники. Когда происходит сбой в ячейке D 40, области, воспринимающие сигнал от ячеек А 10 и В 20, расширяются и перекрываются. Мобильная станция 400 в области перекрытия воспринимает сигнал ячейки В 20 и направляет запрос на выполнение процедуры переключения каналов связи в отношении ячейки В 20. Однако, согласно фиг. 3, соседние ячейке А базовые приемопередающие станции - это ячейка G 70, ячейка D 40, и ячейка С 30. Так как ячейка В не зарегистрирована в списке базовых станций, соседних с БПС А, КБС принимает решение об ошибочности запроса мобильной станции на выполнение процедуры переключения каналов связи в отношении ячейки В.
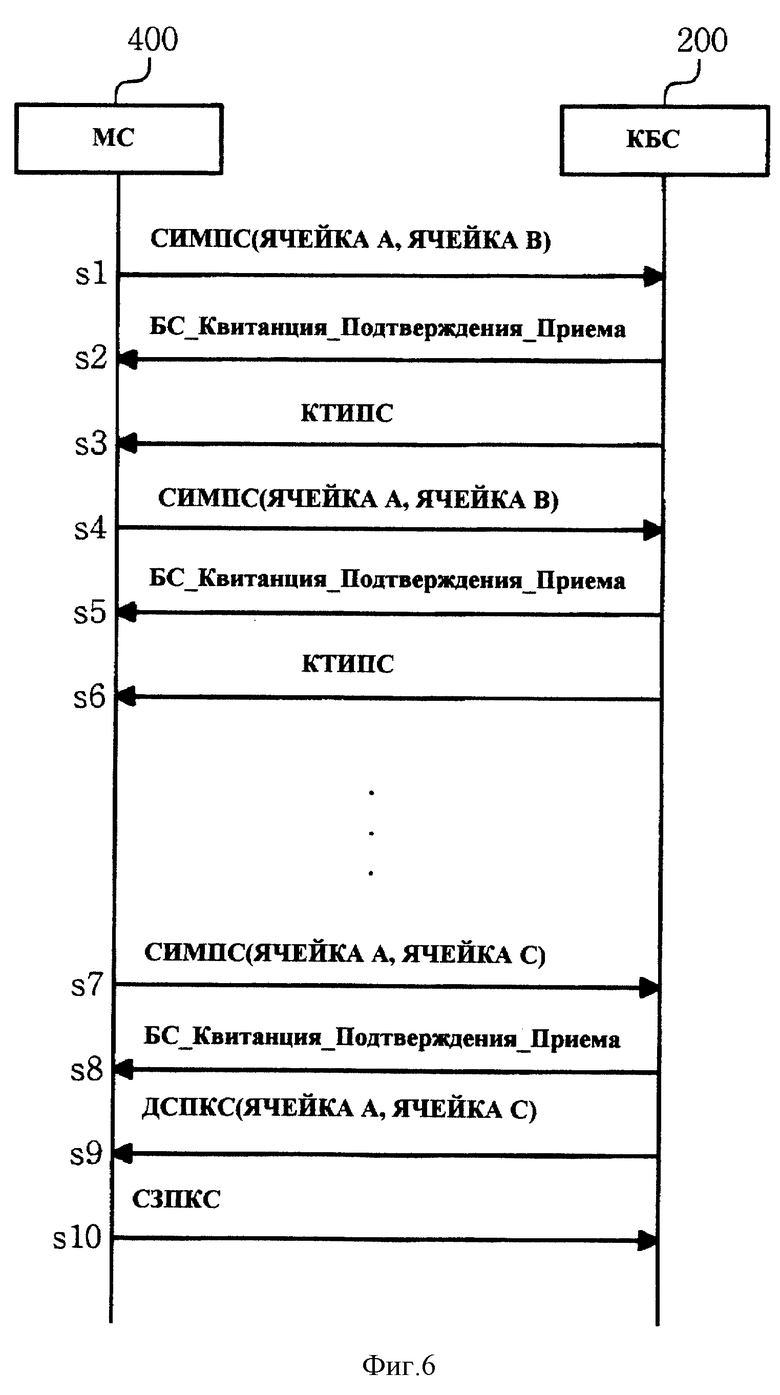
Фиг. 6 иллюстрирует способ для управления командой требования измерения пилот-сигнала (КТИПС) процедуры переключения каналов связи в соответствии с предшествующим уровнем техники. Процедуры переключения каналов связи будут описаны согласно фиг. 6.
Согласно фиг. 3 и 6 КБС 200 уже имеет информацию о том, что базовые приемопередающие станции G, D и С являются соседними с ячейкой А. Мобильная станция 400, передвигаясь в пределах ячейки А 10, воспринимает пилот-сигналы ячейки А и ячейки В, поскольку в БПС D произошел сбой. Мобильная станция направляет КБС 200 через БПС А ячейки А сообщение об измерении мощности пилот-сигнала (СИМПС), включающее информацию о пилот-сигналах ячеек А и В (этап 1).
КБС 200 направляет мобильной станции 400 ответное сообщение на СИМПС (то есть сообщение БС_Квитанция_Подтверждения_Приема) (этап 2) и принимает решение, что СИМПС некорректно, поскольку в списке базовых станций, соседних с БПС А, не содержится БПС В. КБС 200 направляет мобильной станции 300 команду требования измерения пилот-сигнала (КТИПС) с целью запросить повторно СИМПС (этап 3). Если мобильная станция 400 все еще воспринимает сигнал БПС В, она направляет то же самое СИМПС (которое содержит пилот-сигналы ячеек А и В) (этап 4). Затем КБС 200 направляет мобильной станции в ответ на второе СИМПС те же самые сообщения (БС_Квитанция_Подтверждения_Приема и КТИПС) (этапы 5 и 6), и этапы 4-6 повторяются до тех пор, пока мобильная станция 400 не выйдет из зоны влияния БПС В 20.
Если мобильная станция 400 выходит из зоны обслуживания БПС В 20 и попадает в зону обслуживания БПС С 30, она направляет контроллеру базовой станции СИМПС, содержащее пилот-сигналы ячеек А 10 и С 30 (этап 7).
КБС 200 передает ответное сообщение на СИМПС (этап 8). После подтверждения того, что БПС С содержится в списке базовых станций, соседних с БПС А, КБС 200 направляет мобильной станции 400 директивное сообщение на выполнение процедуры переключения каналов связи (ДСПКС). Мобильная станция 400 в ответ на ДСПКС выполняет процедуру переключения каналов связи и направляет КБС 200 сообщение о завершении переключения каналов связи (СЗПКС).
Как указано выше, если мобильная станция запрашивает процедуру переключения каналов связи к БПС, которая отсутствует в списке соседних базовых станций (например, БПС В), между мобильной станцией и БПС возникают излучаемые ими последовательно, ненужные сообщения (то есть, СИМПС, БС_Квитанция_Подтверждения_ Приема, и КТИПС). Такие сообщения приводят к избыточным осуществлениям процесса отказа в выполнении процедуры переключения каналов связи, образуя бесконечный цикл, и в результате увеличивая нагрузки БПС и КБС.
Более того, если попытки выполнения процедуры переключения каналов связи происходят во время связи мобильной станции с БПС и затем возрастают сигналы сообщений пакета трафика, то данные (например, голосовые) не передаются посредством сообщений пакета трафика, и, следовательно, падает качество связи. В этих условиях стандартная система предусматривает способ для сокращения вышеупомянутых ненужных сообщений. Настоящее изобретение для преодоления существующих проблем обеспечивает снижение генерации ненужных сообщений.
Настоящее изобретение направлено на создание способа запроса мобильной станции об измерении пилот-сигнала только после того, как пройдет предварительно определенное время действия после восприятия мобильной станцией пилот-сигнала в ситуации, где мобильная станция сделала предыдущий запрос на выполнение процедуры переключения каналов связи к новой БПС, от которой был воспринят пилот-сигнал, но которая отсутствует в списке соседних БПС. Выданная мобильной станции команда ожидания в течение предварительно определенного времени действия содержится в виде части команды требования измерения пилот-сигнала КТИПС.
Требование, предъявляемое к мобильной станции об ожидании предварительно определенного периода времени перед новым измерением пилот-сигнала, обеспечивает мобильную станцию лучшей возможностью воспринимать только пилот-сигналы от обслуживающей и соседней БПС, обусловленную движением мобильной станции в течение предварительно определенного периода времени, в ситуации, в которой мобильная станция запрашивает процедуру переключения каналов связи к БПС, не содержащейся в списке соседних БПС. То есть предполагается, что мобильная станция за этот период времени продвинется достаточно далеко от соседней БПС, чтобы не воспринимать ее пилот-сигнал.
В основном эти и другие задачи настоящего изобретения решаются с помощью способа управления командой требования измерения пилот-сигнала (КТИПС), включающего этапы: (1) восприятия мобильной станцией, связанной в текущий момент с первой базовой приемопередающей станцией (БПС), пилот-сигнала второй БПС, не связанной с мобильной станцией, мощность которого больше предварительно определенного порогового значения; (2) передачи информации от мобильной станции контроллеру базовой станции КБС о мощности пилот-сигнала, принимаемого от первой БПС и второй БПС, посредством сообщения об измерении мощности пилот-сигнала (СИМПС), если мобильная станция воспринимает мощность пилот-сигнала второй БПС; (3) информирования мобильной станции о приеме СИМПС для предотвращения передачи ею другого СИМПС; (4) проверки, является ли вторая БПС соседней с первой БПС; (5) если вторая БПС является соседней БПС, то указания мобильной станции выполнить процедуру переключения каналов связи; (6) если вторая БПС не является соседней БПС, то передачи мобильной станции от КБС команды требования измерения пилот-сигнала (КТИПС), включающей предварительно определенное время действия; (7) по истечении предварительно определенного времени действия, заданного в КТИПС, передаваемой от КБС, передачи мобильной станцией КБС посредством сообщения об измерении мощности пилот-сигнала (СИМПС) информации о мощностях пилот-сигналов, принимаемых от каждой БПС.
Согласно второму варианту осуществления настоящего изобретения заявлен способ управления командой требования измерения пилот-сигнала (КТИПС), включающий этапы: (1) восприятия мобильной станцией, в текущее время связанной с первой базовой приемопередающей станцией (БПС), пилот-сигнала второй БПС, не связанной в текущее время с мобильной станцией, мощность которого превышает предварительно определенное пороговое значение; (2) передачи мобильной станцией контроллеру базовых станций (КБС) информации о мощности пилот-сигнала первой БПС и второй БПС посредством сообщения об измерении мощности пилот-сигнала (СИМПС); (3) если мобильная станция воспринимает пилот- сигнал, мощность которого больше предварительно определенного порогового значения, уведомления мобильной станции о приеме СИМПС для предотвращения передачи ею другого СИМПС; (4) проверки, является ли вторая БПС соседней с первой БПС; (5) если вторая БПС является соседней БПС, то указания мобильной станции на выполнение процедуры переключения каналов связи; (6) если вторая БПС не является соседней БПС, то по истечении предварительно определенного времени задержки передачи мобильной станции от КБС команды требования измерения пилот-сигнала (КТИПС); и (7) сразу после приема КТИПС передачи КБС информации о мощностях всех принимаемых пилот-сигналов базовых приемопередающих станций посредством сообщения об измерении мощности пилот-сигнала (СИМПС).
Согласно третьему варианту осуществления настоящего изобретения заявлен способ управления командой требования измерения пилот-сигнала (КТИПС), включающий этапы: (1) восприятия мобильной станцией, которая в текущее время связана с первой базовой приемопередающей станцией (БПС), пилот-сигнала второй БПС, не связанной в данный момент с мобильной станцией, мощность которого превышает предварительно определенное пороговое значение; (2) если мобильная станция воспринимает пилот-сигнал мощностью, превышающей предварительно определенное пороговое значение, передачи информации мобильной станцией контроллеру базовой станции (КБС) о мощностях пилот-сигнала первой БПС и второй БПС посредством сообщения об измерении мощности пилот-сигнала (СИМПС); (3) информирования мобильной станции о приеме СИМПС для предотвращения передачи ею ненужного СИМПС; (4) проверки, является ли вторая БПС соседней с первой БПС; (5) если вторая БПС является соседней БПС, то указания мобильной станции выполнить процедуру переключения каналов связи; (6) если вторая БПС не является соседней БПС, то после ожидания КБС в течение предварительно определенного времени задержки передачи им мобильной станции команды требования измерения пилот-сигнала (КТИПС); и (7) передачи мобильной станцией по истечении предварительно определенного времени действия после приема КТИПС информации о мощностях всех пилот-сигналов, принимаемых от базовых приемопередающих станций посредством сообщения об измерении мощности пилот-сигнала (СИМПС).
Настоящее изобретение предотвращает ненужный последовательный обмен сообщениями в эфире, приводящий к избыточным передачам между мобильной станцией и контроллером базовой станции, когда мобильная станция воспринимает пилот-сигнал, переданный БПС, которая не включена в список соседних БПС, в связи с изменениями условий радиосвязи и в связи с добавлением или удалением БПС.
Устранение ненужных сообщений избыточных передач в эфире между мобильной станцией и КБС приводит к улучшению качества связи и сокращению отказов в процедурах передачи, что выражается в соответствующем сокращении системной нагрузки БПС и КБС.
На фиг. 1 - упрощенная блок-схема сотовой системы связи множественного доступа с кодовым разделением каналов (МДКР) в соответствии с предшествующим уровнем техники.
Фиг. 2 - график, иллюстрирующий типичную процедуру гибкого переключения каналов связи в соответствии с предшествующим уровнем техники.
Фиг. 3 - диаграмма, иллюстрирующая перемещение мобильной станции в пределах сотовой системы связи с множеством ячеек, приведенной на фиг. 1.
Фиг. 4 - диаграмма, иллюстрирующая нормальную реализацию процедуры переключения каналов связи в соответствии с предшествующим уровнем техники.
Фиг. 5 - диаграмма, иллюстрирующая аномальную реализацию процедуры переключения каналов связи в соответствии с предшествующим уровнем техники.
Фиг. 6 - диаграмма обмена сообщениями, иллюстрирующая способ управления командой требования измерения пилот-сигнала (КТИПС) процедуры переключения каналов связи в соответствии с предшествующим уровнем техники.
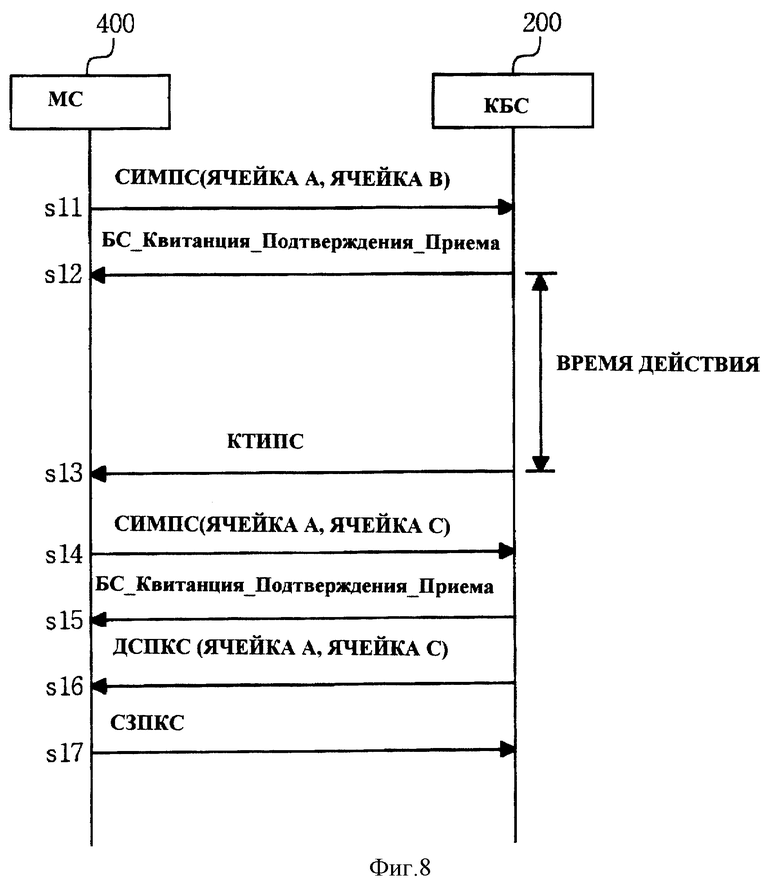
Фиг. 7 - диаграмма обмена сообщениями, иллюстрирующая способ управления командой требования измерения пилот-сигнала (КТИПС) процедуры переключения каналов связи в соответствии с возможным вариантом осуществления настоящего изобретения.
Фиг. 8 - диаграмма обмена сообщениями, иллюстрирующая способ управления командой требования измерения пилот-сигнала (КТИПС) процедуры переключения каналов связи в соответствии с альтернативным вариантом осуществления настоящего изобретения.
Предпочтительный вариант осуществления настоящего изобретения касается системы и способа для указания мобильной станции, в случае, когда мобильная станция сделала предыдущий запрос на выполнение процедуры переключения каналов связи к базовой приемопередающей станции (БПС), которой нет в списке соседних с мобильной станцией, измерять пилот-сигнал только после предварительно определенной задержки времени.
Первый вариант осуществления настоящего изобретения направлен на введение вышеупомянутой предварительно определенной задержки времени. Предварительно определенная задержка времени дает информацию мобильной станции о времени ожидания перед проведением измерения пилот-сигнала. Задержка времени, включенная как часть информации в команду требования измерения пилот-сигнала (КТИПС), исходящую от контроллера базовой станции (КБС), определяется здесь как "время действия". Если КБС переключает значение поля использования времени действия из "Нет" в "Да" и передает КТИПС мобильной станции, мобильная станция будет обрабатывать соответствующее сообщение только по истечении предварительно определенного времени действия.
Предварительно определенное время действия определяется как минимальное время, требуемое мобильной станции для перемещения от не-соседней БПС в такое положение, где мощность пилот-сигнала от не-соседней БПС падает ниже предварительно определенного порогового значения.
Второй вариант осуществления настоящего изобретения направлен на передачу команды требования измерения пилот-сигнала (КТИПС), исходящей от контроллера базовых станций (КБС), мобильной станции по истечении определенной задержки времени. То есть мобильная станция принимает КТИПС от КБС через предварительно определенное время задержки после того, как она направляет сообщение об измерении мощности пилот-сигнала (СИМПС).
Третий вариант осуществления настоящего изобретения направлен на способ, объединяющий два первых аспекта. То есть КБС передает мобильной станции КТИПС по истечении предварительно определенного времени задержки и мобильная станция обрабатывает КТИПС по истечении предварительно определенного времени действия.
Первый вариант осуществления будет описан со ссылками на чертежи. Первый вариант осуществления направлен на усовершенствование стандарта эфирного интерфейса типа IS-95, IS-95A, J-STD_008 и IS95B и имеет поле использования времени действия Использование_Времени, значение которого устанавливается в "1" или "0" для определения, использовать ли время действия. Команда требования измерения мощности пилот-сигнала (КТИПС) является одним из сообщений прямого канала трафика, принятых стандартом эфирного интерфейса. КБС устанавливает значение поля Использование_Времени в "1" в КТИПС, которая должна быть передана мобильной станции, и устанавливает значение времени действия.
Когда КБС должен немедленно принять СИМПС от мобильной станции, связанной с КБС, КБС устанавливает в КТИПС значение поля Использование_Времени в "0" и направляет КТИПС мобильной станции. Соответственно, мобильная станция сразу после приема КТИПС направляет сообщение об измерении мощности пилот-сигнала (СИМПС) обратно. Напротив, когда КБС дает указание мобильной станции отсылать СИМПС по истечении времени действия после принятия КТИПС, значение поля Использование_ Времени в КТИПС должно быть установлено равным "1"
Фиг. 7 иллюстрирует способ для управления командой требования измерения мощности пилот-сигнала (КТИПС) процедуры переключения каналов связи в соответствии с первым вариантом осуществления настоящего изобретения.
На фиг. 7 изображена мобильная станция 400, которая направляет КБС 200 сообщение об измерении мощности пилот-сигнала (СИМПС), включающее пилот-сигнал активной БПС А и пилот-сигнал БПС В, недавно воспринятый мобильной станцией (этап 11). Мобильная станция принимает решение, что КБС не получает СИМПС, и повторно неоднократно направляет СИМПС до тех пор, пока КБС не высылает мобильной станции сообщение БС_Квитанция_Подтверждения_Приема. Поэтому КБС 200 передает мобильной станции 400 в ответ на СИМПС сообщение БС_ Квитанция_ Подтверждения_Приема и предотвращает дальнейшие посылки мобильной станцией СИМПС (этап 12).
Сигнал, воспринятый мобильной станцией, сравнивается с П_Присоединения, пороговым значением пилот-сигнала, которое определяется как уровень мощности пилот-сигнала, достаточной для осуществления связи мобильной станцией. Если пилот-сигнал БПС, воспринимаемый мобильной станцией, больше П_Присоединения, соответствующая БПС должна быть активной для данной мобильной станции.
КБС 200 согласно принимаемому СИМПС осуществляет проверку, включена ли БПС В в список соседних с БПС А. То есть принимаемое СИМПС используется для определения, является ли БПС В соседней базовой станцией для БПС А. Если БПС В не включена в список соседних БПС, КБС устанавливает в КТИПС значение поля Использование_ Времени в "1", далее добавляет в КТИПС информацию о времени действия и направляет КТИПС мобильной станции 400, запрашивая от мобильной станции 400 новое сообщение о мощности пилот-сигнала всех базовых приемопередающих станций, воспринимаемых в данное время мобильной станцией 400 (этап 13).
Если параметр Использование_Времени принимаемой КТИПС установлен равным 1, мобильная станция 400 направляет СИМПС по истечении времени действия (этап 14). Так как мобильная станция непрерывно перемещается, то, возможно, за прошедшее время действия она вступает в область обслуживания новой БПС. Если мобильная станция входит в область действия БПС С, например, СИМПС будет включать пилот-сигналы и БПС А, и БПС С.
КБС 200 передает в ответ сообщение ВС_Квитанция_Подтверждения_Приема (этап 15), и осуществляет проверку в соответствие с полученным СИМПС, включена ли БПС С в список соседних с БПС А. Если БПС С присутствует в списке соседних БПС, КБС выделяет для БПС С канал трафика и направляет команду на выполнение процедуры переключения каналов связи (КПКС), чтобы подсоединить БПС С (этап 16). Мобильная станция 400 выполняет процедуру переключения каналов связи и сообщает КБС 200 о завершении переключения каналов связи, направляя КБС 200 сообщение о завершении переключения каналов связи (СЗПКС).
Когда процедура переключения каналов связи завершена, мобильная станция 400 имеет канал связи одновременно и с БПС А, и с БПС С. Обе станции БПС А и БПС С, каждая, принимают сигнал (кадр речевого сигнала) от мобильной станции, который передается КБС 200. КБС 200 осуществляет из полученных от БПС А и БПС С сигналов выбор сигнала, у которого кадр речевого сигнала лучше.
Так как мобильная станции 400 перемещается, то наступает момент, когда пилот-сигнал одной из двух базовых приемопередающих станций А и С, например, БПС А удерживается непрерывно ниже порога П_Отсоединения в течение времени В П_Отсоединения, и КБС 200 требует, чтобы БПС А отсоединила канал связи с мобильной станцией 400. В этой ситуации остается единственный канал связи между мобильной станцией 400 и БПС С.
Указанные выше процедуры будут описаны более подробно со ссылками на фиг. 3. Поддерживающая связь мобильная станция, находящаяся в ячейке А 10, воспринимает пилот-сигналы от соседних базовых приемопередающих станций, и, когда мощность воспринимаемого пилот-сигнала превышает П_Присоединения, мобильная станция передает КБС сообщение об измерении мощности пилот-сигнала (СИМПС). Если бы ячейка D 40 оказалась вне обслуживания, мобильная станция приняла бы вместо пилот-сигнала ячейки D 40 пилот-сигнал ячейки В 20. КБС опознает БПС В в принимаемом от мобильной станции СИМПС, и, если БПС В не включена в список соседних базовых приемопередающих станций, КБС устанавливает значение поля Использование_Времени команды требования измерения пилот-сигнала (КТИПС) в "1" и передает КТИПС, содержащую информацию о времени действия, мобильной станции.
Так как мобильная станция редко остается в граничной области между ячейками А 10 и D 40, как показано на чертеже, когда она направляет сообщение об измерении мощности пилот-сигнала по истечении времени действия, мобильная станция, более вероятно, будет воспринимать пилот-сигнал других базовых приемопередающих станций, а не БПС В. Следовательно, не произойдет обмен ненужными СИМПС и КТИПС между мобильной станцией и КБС.
Фиг. 8 иллюстрирует способ управления командой требования измерения пилот-сигнала (КТИПС) процедуры переключения каналов связи в соответствии со вторым вариантом осуществления настоящего изобретения. КБС 200 в ответ на СИМПС направляет мобильной станции 400 сообщение БС_Квитанция_Подтверждения_ Приема (этап 12) и после предварительно определенного времени задержки посылает мобильной станции команду требования измерения пилот-сигнала (КТИПС) (этап 13). Другими словами, КБС 200 ожидает, пока мобильная станция не переместится на достаточное расстояние, и запрашивает СИМПС.
Третий вариант осуществления настоящего изобретения объединяет первый и второй варианты. То есть КБС направляет мобильной станции КТИПС по истечении предварительно определенного времени задержки, и, кроме того, значение поля Использование_ Времени в КТИПС устанавливается в "1", и также включается информация о времени действия.
В третьем варианте осуществления, так как мобильная станция передает СИМПС по истечении полного времени, включающего время задержки КБС и время действия, включенное в КТИПС, КБС время задержки и время действия.
В то время как настоящее изобретение допускает альтернативные варианты и различные модификации, некоторые конкретные варианты его осуществления были описаны выше со ссылками на чертежи. Однако, должно быть понято, что настоящее изобретение не ограничивается конкретными раскрытыми здесь формами, а охватывает все модификации, эквивалентные и альтернативные варианты, входящие в объем изобретения и близкие по своей сущности к данному изобретению, как определено формулой изобретения.
Заявленные способ и система относятся к сотовым системам связи и предназначены для управления командой требования измерения пилот-сигнала в процедуре гибкого переключения каналов связи в системе множественного доступа с кодовым разделением каналов. Техническим результатом осуществления настоящего изобретения является включение этапов восприятия мобильной станцией, связанной в текущее время с первой базовой приемопередающей станцией (БПС), пилот-сигнала второй БПС, в текущее время не связанной с мобильной станцией, мощность которого превышает предварительно определенное пороговое значение. Это достигается тем, что происходит передача от мобильной станции контроллеру базовой станции (КБС) информации о мощностях пилот-сигнала первой и второй БПС посредством сообщения об измерении мощности пилот-сигнала (СИМПС), если мобильная станция воспринимает пилот-сигнал, мощность которого превышает предварительно определенное пороговое значение, сообщения мобильной станции о приеме СИМПС для предотвращения передачи ею ненужного СИМПС, проверки, относится ли вторая БПС к соседним БПС для первой БПС, если вторая БПС относится к соседним БПС, то указания мобильной станции выполнить процедуру переключения каналов связи. 6 с. и 26 з.п.ф-лы, 8 ил.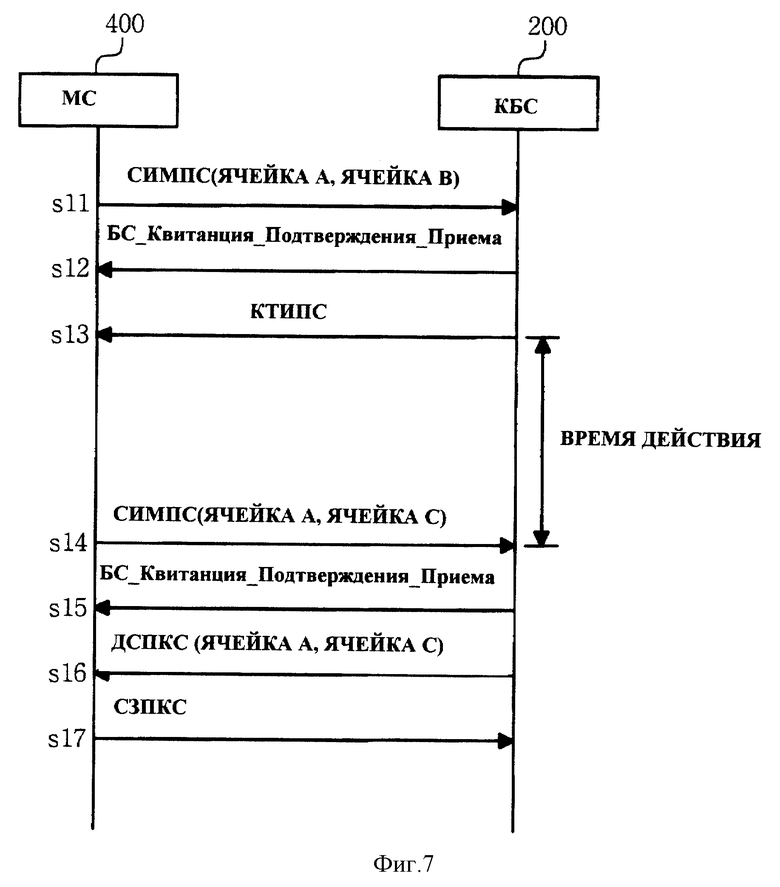
если указанная вторая БПС не является соседней БПС, то передачи от указанного КБС к указанной мобильной станции команды требования измерения пилот-сигнала (КТИПС), отличающийся тем, что дополнительно включает этап, при котором по истечении предварительно определенного времени действия после приема указанной КТИПС, осуществляют сообщение указанной мобильной станцией указанному КБС информации о мощностях всех принимаемых от базовых приемопередающих станций пилот-сигналов посредством сообщения об измерении мощности пилот-сигнала (СИМПС).
| US 5640414 A, 17.06.1997 | |||
| RU 95101384 А1, 20.11.1996 | |||
| US 5319796 A, 07.06.1994 | |||
| US 5408684 A, 18.04.1995 | |||
| Роторный пленочный аппарат | 1975 |
|
SU671825A1 |
| EP 0695047 А1, 30.01.1996. | |||

