Изобретение относится к машиностроительной гидравлике и может быть использовано в составе систем терморегулирования изделий авиационной и ракетной техники.
Известен многоступенчатый электронасосный агрегат (ЭНА), содержащий корпус, электродвигатель, 3 рабочих колеса и направляющие аппараты, размещенные между ними [1]. Недостатком этого ЭНА является секционная конструкция, что приводит к наличию большого числа уплотнений между внутренней полостью и атмосферой и повышению вероятности утечки.
Этого недостатка лишен многоступенчатый ЭНА, содержащий корпус и установленную в нем цилиндрическую обойму, в расточке которой размещены электродвигатель и n [n = 2] рабочих колес, при этом на наружной поверхности обоймы выполнен переводной канал, сообщающийся с поверхностью расточки в местах выхода первого и входа во второе рабочее колесо, выбранный в качестве прототипа [2].
Недостатком такого ЭНА являются нетехнологичность переводного канала, обработка которого требует фрезерования винтовой канавки и выполнения соединительных отверстий между канавкой и расточкой в обоих концах канавки, т.е. двух операций, что значительно увеличивает время обработки. Кроме того, само выполнение соединительных отверстий достаточно сложно, поскольку из-за значительного отклонения оси отверстий от нормали к поверхности обоймы происходит отжим режущего инструмента и возможна его поломка. Еще одним недостатком прототипа являются значительные радиальные габариты и масса ЭНА, что является следствием постоянной толщины обоймы.
Техническим результатом, достигаемым с помощью заявленного изобретения, является повышение технологичности и снижение радиальных габаритов и массы ЭНА.
Этот результат достигается за счет того, что в известном многоступенчатом ЭНА, содержащем корпус и установленную в нем обойму с наружной цилиндрической поверхностью, в расточке которой размещены электродвигатель и n [n = 2, 3 и т.д.] рабочих колес, при этом на наружной цилиндрической поверхности обоймы выполнены n-1 переводных каналов, сообщающихся с поверхностью расточки в местах выхода каждого предыдущего и входом в каждое последующее рабочее колесо, согласно изобретению расточка обоймы выполнена эксцентричной относительно наружной цилиндрической поверхности обоймы, а переводные каналы выполнены в виде канавок постоянного поперечного сечения и постоянной глубины h относительно наружной цилиндрической поверхности обоймы, при этом эксцентриситет e выполнен равным
e = h + s - 0,5(D - d),
где D и d - диаметры наружной цилиндрической поверхности и расточки обоймы соответственно,
s - максимальная толщина между расточкой обоймы и основанием канавок, при этом
где a - размер хорды отверстий, образованных пересечением переводного канала с расточкой.
Выполнение расточки обоймы эксцентричной относительно наружной цилиндрической поверхности обоймы, а переводных каналов - в виде канавок постоянного поперечного сечения и постоянной глубины h относительно наружной цилиндрической поверхности обоймы позволяет повысить технологичность изготовления ЭНА (т.к. переводной канал и отверстия, сообщающие его с поверхностью расточки, выполняются за счет одной операции - фрезерования канавки; при этом ограничения, накладываемые на величину D, обеспечивают возможность гарантированного получения указанных отверстий) и снизить его радиальные габариты и массу (за счет уменьшения средней толщины обоймы). Таким образом, изобретение отвечает критерию "изобретательский уровень".
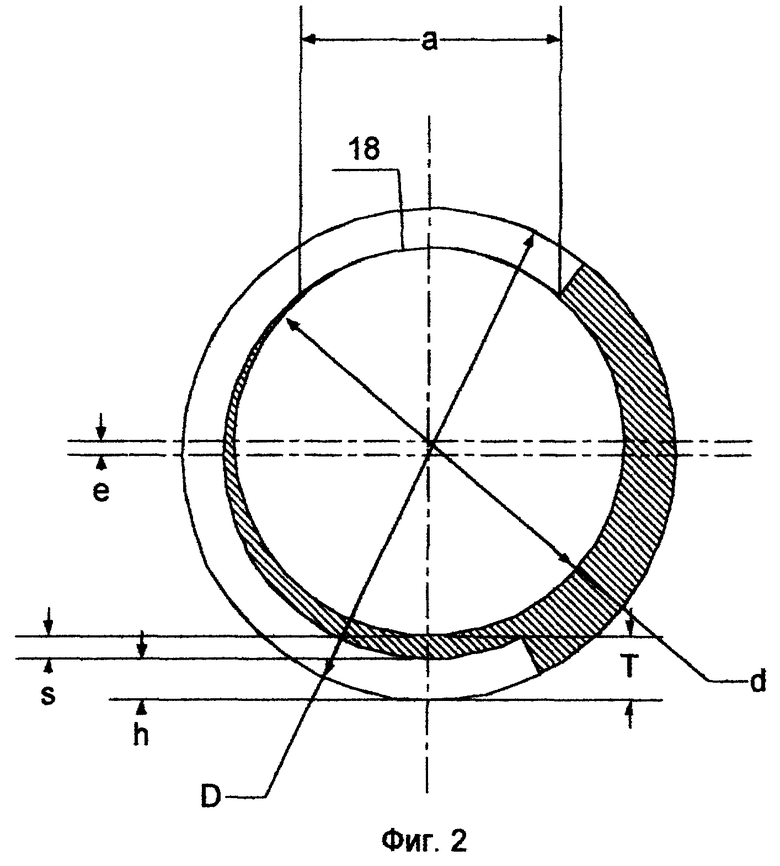
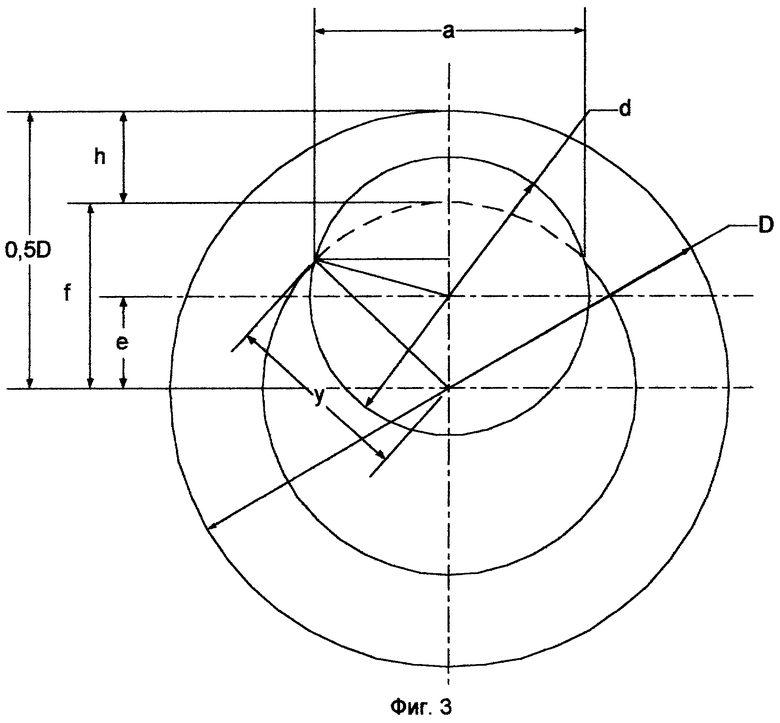
На фиг 1. приведен пример конкретного выполнения ЭНА, продольный разрез, на фиг 2 - то же, поперечное сечение обоймы в месте размещения колеса первой ступени ЭНА, на фиг. 3 приведена расчетная схема для ограничений, накладываемых на величину D.
Многоступенчатый ЭНА содержит корпус 1 с входным 2 и выходным 3 штуцерами. В корпусе 1 установлена обойма 4 с наружной цилиндрической поверхностью 5. В обойме 4 выполнена расточка 6, в которой размещены электродвигатель 7, на валу которого установлены рабочие колеса 8 и 9, а также улитки 10 и 11 и диафрагма 12. Обойма 4 присоединена к электродвигателю посредством винтов 13, а к корпусу 1 - винтами 14. На наружной поверхности 5 обоймы 4 выполнен переводной канал 15, выполненный в виде канавки постоянного поперечного сечения и постоянной глубины h относительно наружной цилиндрической поверхности 5 обоймы 4. На каждом конце этой канавки (в месте выхода 16 предыдущего колеса 8 и входа 17 в последующее колесо 9) она сообщена с расточкой 6 отверстиями 18, которые образованы пересечением канала 15 с расточкой 6, что обеспечивается выбором значения h, приведенным ниже. Расточка 6 выполнена эксцентричной относительно наружной цилиндрической поверхности 5, эксцентриситет e выполнен равным
e = h + s - 0,5(D - d),
где D и d - диаметры наружной цилиндрической поверхности 5 и расточки 6 обоймы 4 соответственно,
s - максимальная толщина между расточкой 6 и основанием переводного канала - канавки 15, при этом
где a - размер хорды отверстий 18, образованных пересечением переводного канала 15 с расточкой 6.
Приведем вывод математических выражений: из фиг. 2 видно, что максимальная толщина T обоймы 4
T = h + s.
В то же время очевидно, что
T = 0,5(D - d) + e.
Отсюда следует, что
e = h + s - 0,5(D - d).
Следует отметить, что величины, из которых определяется e, являются конструктивными параметрами: h вычисляется исходя из величины проходного сечения перехода от предыдущей ступени к последующей, s выбирается исходя из возможностей обработки и в первом приближении может быть принята равной толщине между расточкой и основанием переводного канала в прототипе, d определяется исходя из геометрических размеров улиток и равен соответствующему диаметру прототипа. D выбирается конструктивно с учетом условия
которое обеспечивает возможность сообщения канала 15 с расточкой 6.
Определим ограничения на величину D: на фиг. 3 приведена схема расчета, при которой ширина a отверстия 18 получается от пересечения окружности диаметра f - 2h с эксцентричной окружностью диаметра d. Из рассмотрения фиг. 3 видно
0,5D = h + f,
где f - радиус окружности, образованной основанием переводного канала 16.
Из свойств окружности очевидно f = y,
где y - расстояние от центра диаметра D до края отверстия 18.
По теореме Пифагора .
.
Таким образом, ,
, .
.
Очевидно, что при меньших значениях диаметра D всегда ширина отверстия 18 будет большей расчетной величины a. Отсюда следует, что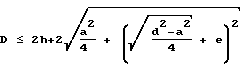 .
.
При меньших значениях D всегда обеспечивается условие, при котором ширина отверстия 18 не менее расчетного размера a (который определяется исходя из размеров выхода предыдущего колеса). Электронасосный агрегат работает следующим образом: при включении электродвигателя 7 он вращает колеса 8 и 9, установленные на валу электродвигателя 7. Жидкость через входной штуцер 2 поступает на вход колеса 8. Далее жидкость поступает на периметр улитки 10 и через выход 16 колеса 8, отверстие 18 - в переводной канал - канавку 15. Далее жидкость поступает на вход 17 рабочего колеса 9, на периметр улитки 11 и в выходной штуцер 3. В результате использования изобретения повышается технологичность за счет того, что переводной канал 15 и отверстия 18 выполняются одной операцией фрезерования, при этом устраняется возможность поломки режущего инструмента. Кроме того, достигается снижение массы и габаритов, что особенно ценно для изделий космической техники. Приведем пример расчета конкретных значений геометрических размеров ЭНА: при значениях D = 70 мм и d = 60 мм, h = 5 мм и s = 1 мм - эти значения характерны для ЭНА космических объектов - по расчету по приведенным формулам получим e = 2 мм. При этом необходимо проверить, соблюдается ли ограничение, накладываемое на диаметр D. Подставив известные переменные и задавшись величиной a = 10 мм, получим D ≅ 73,8 мм, т.е. выбранный ранее диаметр D = 70 мм обеспечивает получение отверстия 18 шириной a. Наружный диаметр обоймы 4 в прототипе составит
Dнар = 60 + 2(5 + 2) = 74 мм,
в заявленном же техническом решении
D = 70 мм,
т.е. меньше на 5,4%. Полученное снижение массы и габаритов особенно ценно для изделий космической техники.
Литература
1. Малюшенко В. В. "Динамические насосы", М., "Машиностроение", 1984, рис. 124 на листе 49.
2. Патент Российской Федерации N 2042053, кл. F 04 D 1/06, 1995 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 1999 |
|
RU2162548C1 |
| МНОГОСТУПЕНЧАТЫЙ ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 2008 |
|
RU2369777C1 |
| ЦЕНТРОБЕЖНЫЙ ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 1999 |
|
RU2160388C1 |
| РЕЗЕРВИРОВАННЫЙ ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 1999 |
|
RU2160390C1 |
| ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 1999 |
|
RU2162549C1 |
| ДУБЛИРОВАННЫЙ ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 1999 |
|
RU2160389C1 |
| ГЕРМЕТИЧНЫЙ ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 1999 |
|
RU2167341C1 |
| ДУБЛИРОВАННЫЙ ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 2012 |
|
RU2514467C2 |
| ДУБЛИРОВАННЫЙ ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 2012 |
|
RU2511788C2 |
| ДУБЛИРОВАННЫЙ ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 2008 |
|
RU2386861C1 |
Многоступенчатый электронасосный агрегат (ЭНА) относится к машиностроительной гидравлике и может быть использован в составе систем терморегулирования изделий авиационной и ракетной техники. ЭНА содержит корпус и установленную в нем цилиндрическую обойму, в расточке которой размещены электродвигатель и n [n = 2, 3 и т.д.] рабочих колес, при этом на наружной поверхности обоймы выполнены n - 1 переводных каналов, сообщающихся с поверхностью расточки в местах выхода каждого предыдущего и входа в каждое последующее рабочее колесо. Расточка обоймы выполнена эксцентричной относительно наружной цилиндрической поверхности обоймы, а переводные каналы выполнены в виде канавок постоянного поперечного сечения и постоянной глубины h относительно наружной цилиндрической поверхности обоймы. Эксцентриситет рассчитывается по формуле и зависит от геометрических размеров обоймы. Использование изобретения позволяет повысить технологичность и уменьшить радиальные габариты и массу ЭНА. 3 ил.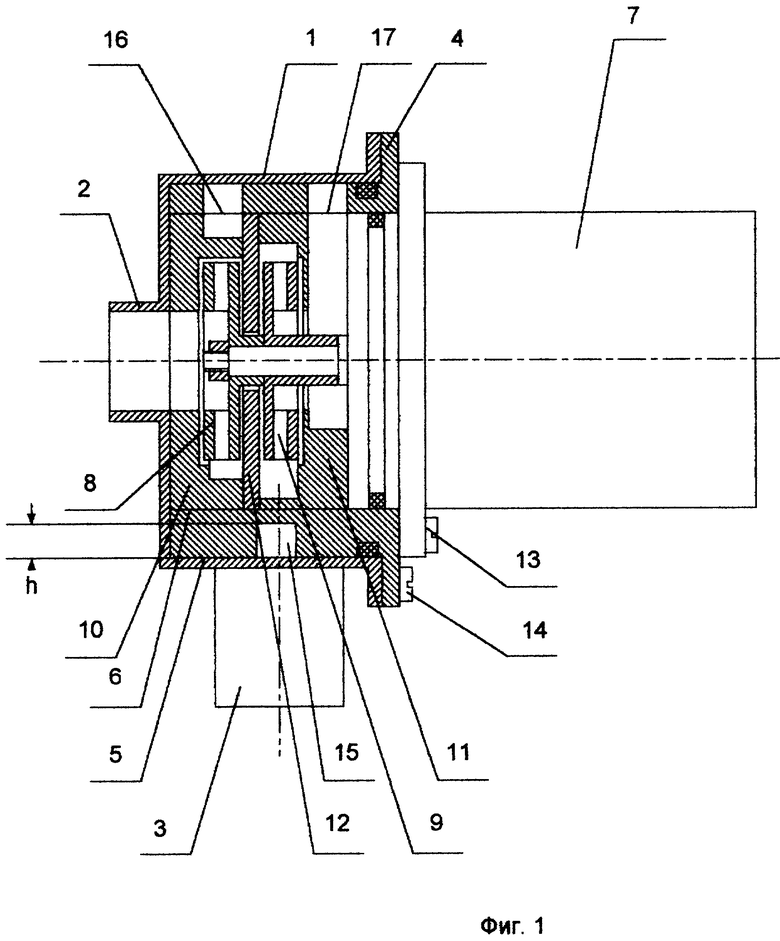
Многоступенчатый электронасосный агрегат, содержащий корпус и установленную в нем обойму с наружной цилиндрической поверхностью, в расточке которой размещены электродвигатель и n [n = 2,3 и т.д.] рабочих колес, при этом на наружной цилиндрической поверхности обоймы выполнены n - 1 переводных каналов, сообщающихся с поверхностью расточки в местах выхода каждого предыдущего и входа в каждое последующее рабочее колесо, отличающийся тем, что расточка обоймы выполнена эксцентричной относительно наружной цилиндрической поверхности обоймы, а переводные каналы выполнены в виде канавок постоянного поперечного сечения и постоянной глубины h относительно наружной цилиндрической поверхности обоймы, при этом эксцентриситет е выполнен равным
e = h + s - 0,5 (D - d),
где D и d - диаметры наружной цилиндрической поверхности и расточки обоймы соответственно;
s - максимальная толщина между расточкой обоймы и основанием канавок, при этом
где a - размер хорды отверстий, образованных пересечением переводного канала с расточкой.
| МНОГОСТУПЕНЧАТЫЙ ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 1992 |
|
RU2042053C1 |
| ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 1996 |
|
RU2103556C1 |
| Многоступенчатый высоконапорный секционный центробежный насос | 1950 |
|
SU91094A1 |
| US 3950112 A, 13.04.1976 | |||
| US 4307995 A, 29.12.1981 | |||
| US 3967915 A, 06.07.1976 | |||
| ГИБКИЙ АРМИРОВАННЫЙ СТАЛЬНЫМ КОРДОМ РЕЗИНОВЫЙ РУКАВ | 1991 |
|
RU2020360C1 |
