Изобретение относится к судостроению и может найти применение в качестве транспортного средства.
Известно судно, содержащее корпус с водительским отделением, установленный на поплавки, внутри которого расположен двигатель с муфтой сцепления, механически соединенный с несущими винтами самолетного типа большого диаметра, установленными по два спереди и сзади под углом 25o к корпусу (а.с. СССР N 312788, 1971).
Недостатками известного судна являются большая энерговооруженность, повышенная опасность при эксплуатации, большие переменные нагрузки на лопасти винтов, работающих на границе двух сред и небольшая высота подъема корпуса судна над поверхностью воды.
Указанные недостатки обусловлены выбранной схемой конструкции.
Известно также аэродинамическое судно, содержащее корпус с водительским и пассажирским отделениями, внутри которого установлен двигатель с муфтой сцепления, механически связанных с движителями вертикального подъема, которые размещены в сквозных вертикальных каналах, выполненных в корпусе в корпусе по два в носовой и кормовой частях (патент США N 4043421, кл. B 60 V 1/00, 1977). Известное аэродинамическое судно по патенту США N 4043421 как наиболее близкое по технической сущности и достигаемому полезному результату принято за прототип.
Недостатками известного аэродинамического судна, принятого за прототип, являются недостаточная мореходность, низкий КПД движителей вертикального подъема, значительное влияние на окружающую среду, небольшая скорость горизонтального движения. Указанные недостатки обусловлены: небольшой высотой парения, трением больших масс воздуха о вертикальные каналы, большим гидродинамическим (волновым) сопротивлением, возникающим из-за взаимодействия корпуса судна с водной поверхностью через упругие потоки воздуха, значительным количеством пыли, водяных брызг и шума, обусловленных истечением с большой скоростью больших масс воздуха.
Целью настоящего изобретения является улучшение эксплуатационных качеств аэродинамического судна.
Указанная цель согласно изобретению обеспечивается тем, что движители вертикального подъема в форме нагнетателей заменены движителями вертикального подъема в виде винта с двумя парами лопастей крыльчатого профиля, установленных с возможностью вращения в противоположные стороны, при этом каждая лопасть снабжена предкрылком, причем двигатель кинематически соединен с движителями вертикального подъема посредством управляемых тормозами дифференциалов, системой устойчивости, которая электрически связана с тормозами дифференциалов.
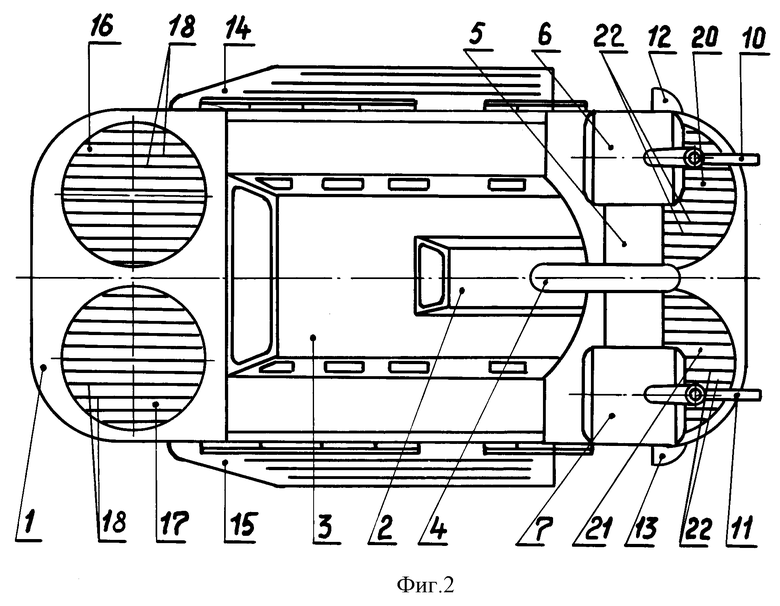
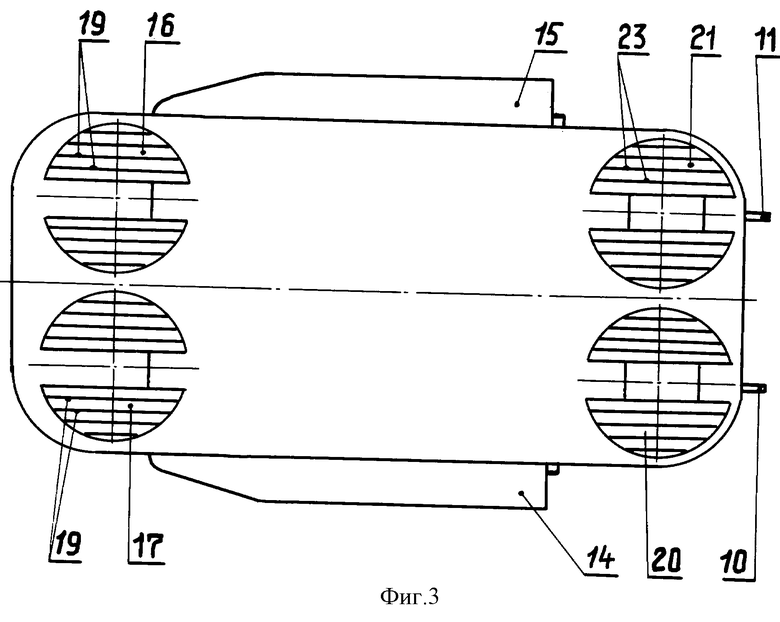
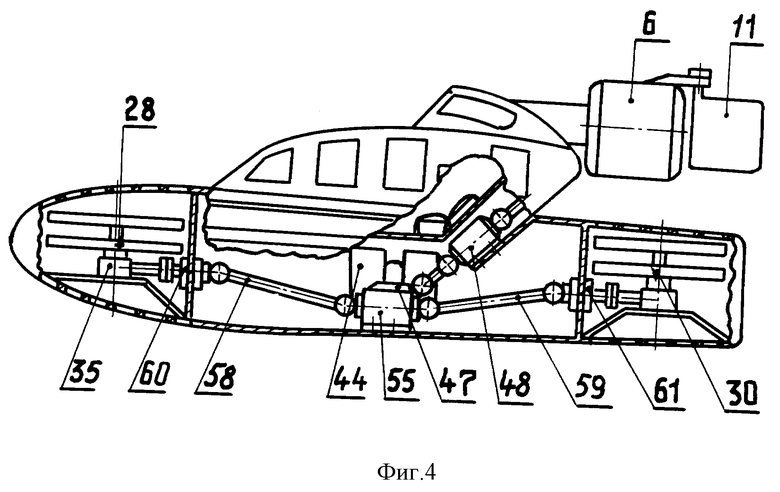
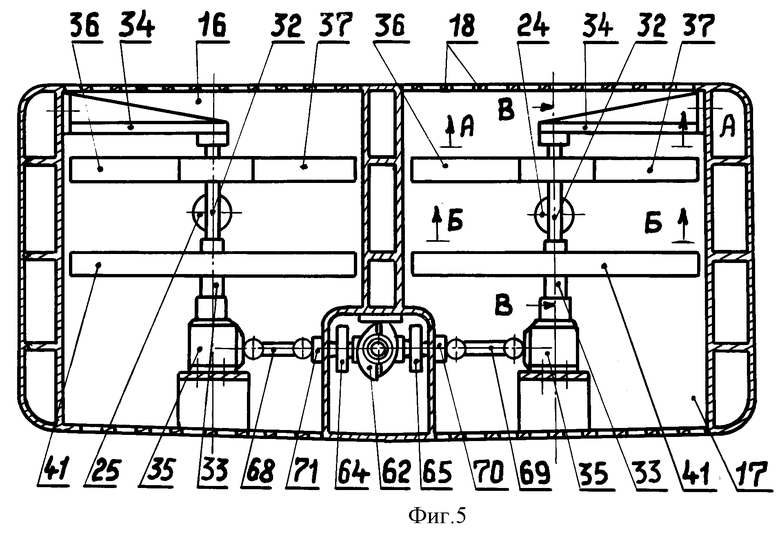
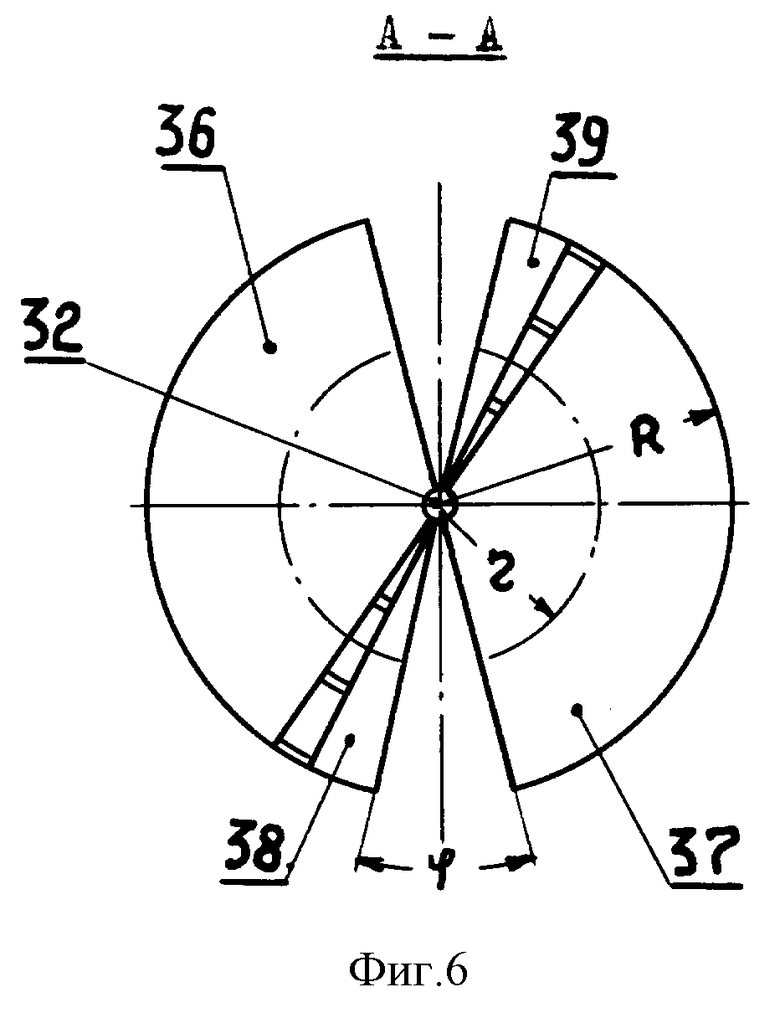
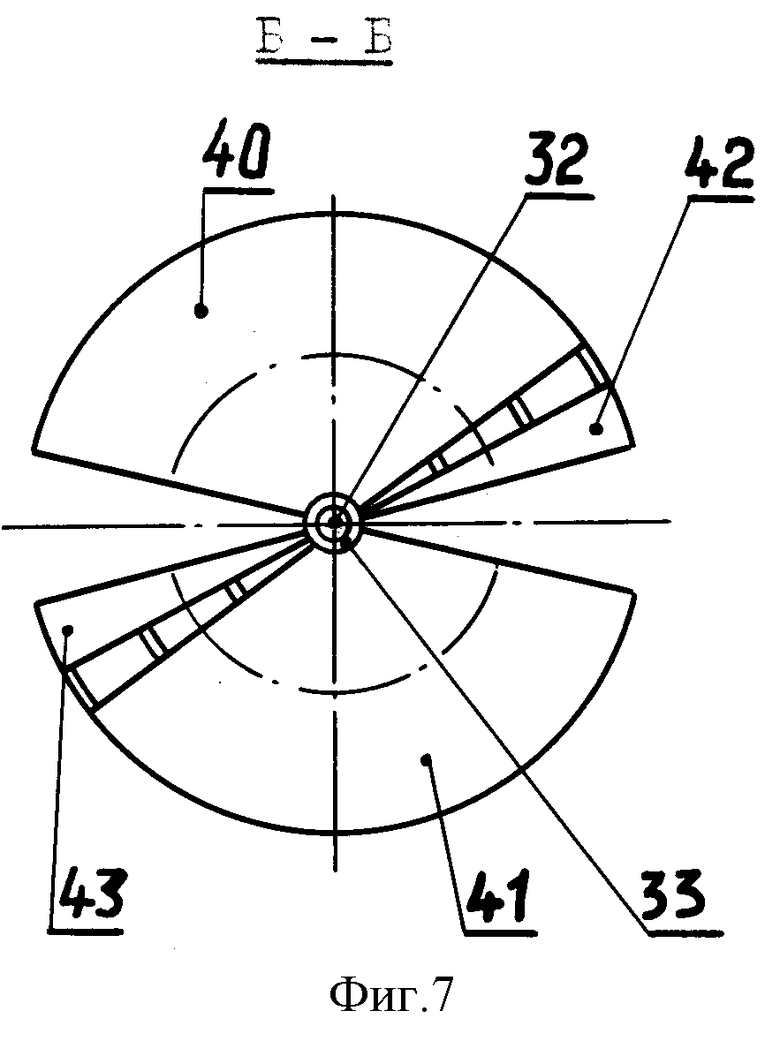
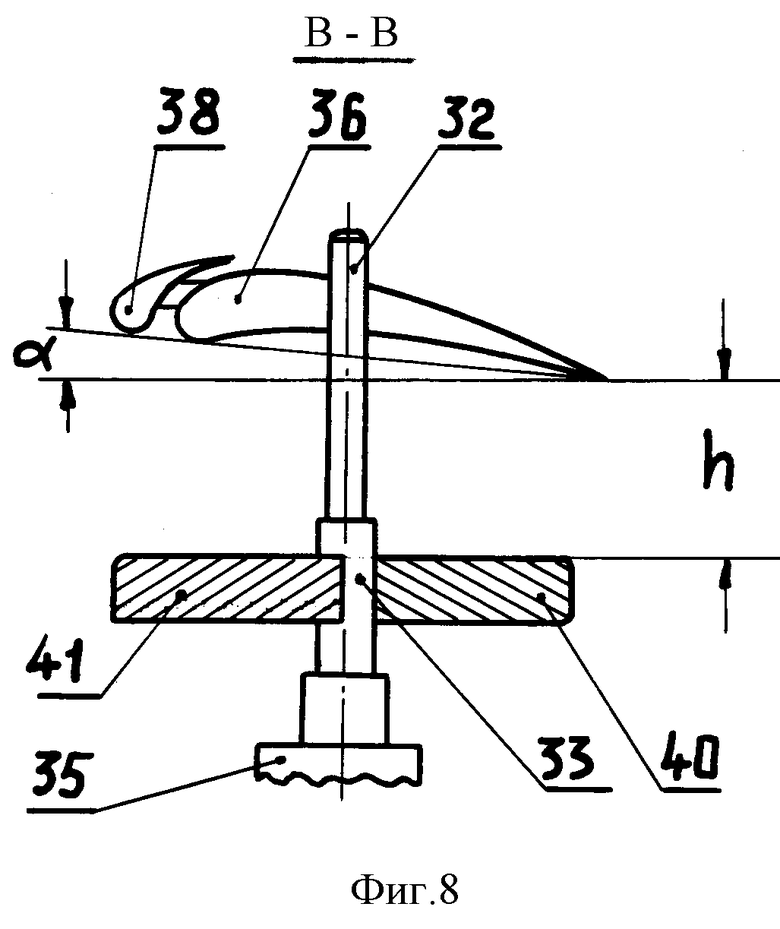
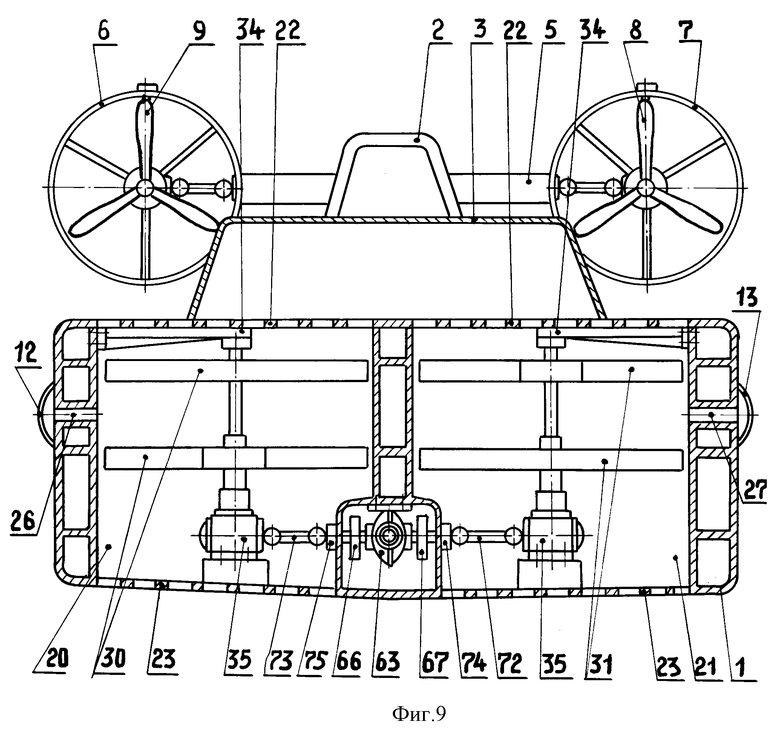
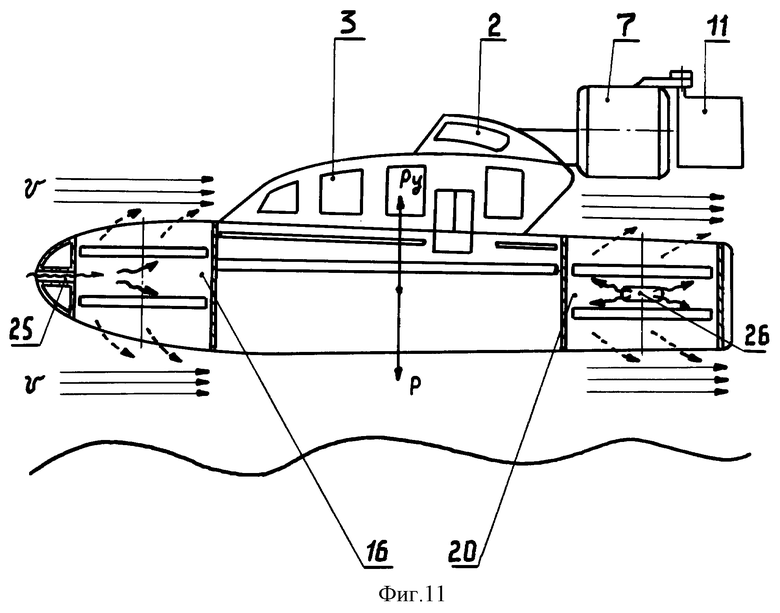
Сущность изобретения поясняется чертежами, где на фиг. 1 изображен общий вид аэродинамического судна; на фиг. 2 - вид на аэродинамическое судно сверху; на фиг. 3 - вид на аэродинамическое судно снизу; на фиг. 4 - схема размещения узлов в корпусе судна; на фиг. 5 - вид на передние движители вертикального подъема со стороны двигателя; на фиг. 6 - разрез по А-А фиг. 5; на фиг. 7 - разрез по Б-Б фиг. 5; на фиг. 8 - разрез по В-В фиг. 5; на фиг. 9 - вид на задние движители вертикального подъема со стороны двигателя; на фиг. 10 - схема силовой передачи; на фиг. 11 - схема движения аэродинамического судна над поверхностью воды.
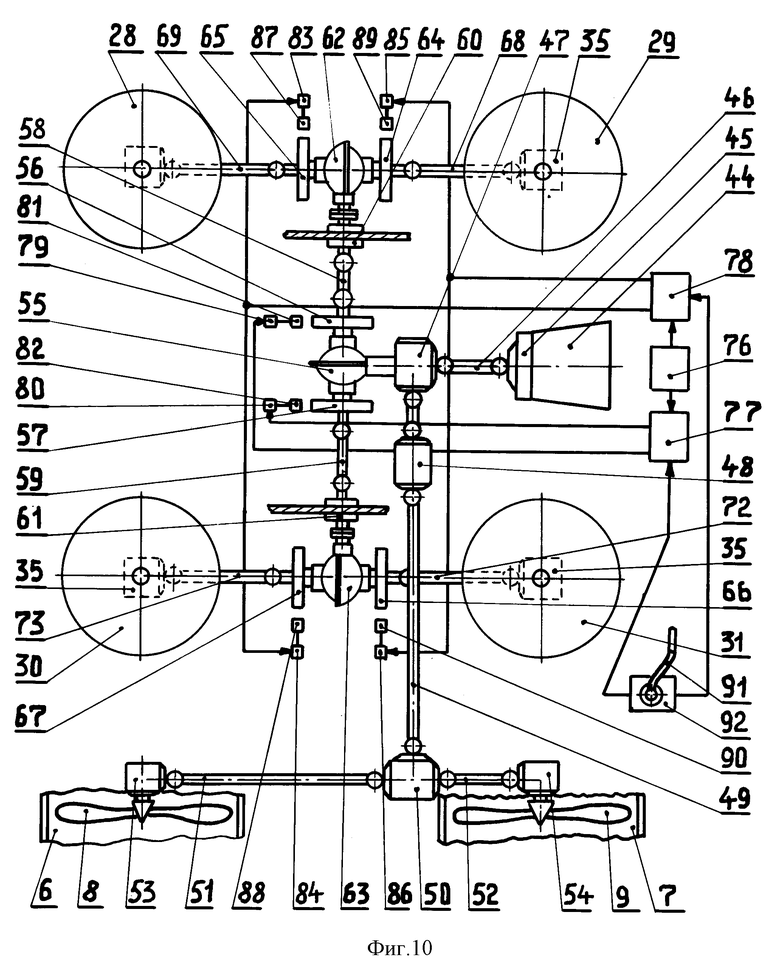
Предлагаемое аэродинамическое судно содержит корпус 1, в котором размещены водительское 2 и пассажирское 3 отделения. В задней части корпуса на продольной 4 и поперечной 5 балках закреплены кольца 6 и 7, в которых размещены воздушные винты 8 и 9 изменяемого шага. Позади колец на кронштейнах установлены струйные рули 10 и 11. По бокам корпуса расположены воздухозаборники 12 и 13 и боковые мостки 14 и 15, выполняющиe при движении роль стабилизаторов. В носовой части корпуса выполнены два сквозных вертикальных канала 16 и 17, закрытыe сверху и снизу металлическими решетками 18 и 19. В кормовой части корпуса также выполнены два сквозных вертикальных канала 20 и 21, закрытых решетками 22 и 23. Передние вертикальные каналы соединены с небольшими горизонтальными каналами 24 и 25, а задние вертикальные каналы соединены горизонтальными каналами 26 и 27 с воздухозаборниками. Внутри вертикальных каналов установлены передние 28 и 29 и задние 30 и 31 движители вертикального подъема, которые одинаковы по конструкции и каждый из них содержит верхнюю вертикальную ось 32, нижнюю вертикальную ось 33, вставленные друг в друга и закрепленные в подшипнике опоры 34 и редуктора 35 с возможностью вращения в противоположные стороны. К верхней оси прикреплена верхняя пара круглых крыльев 36 и 37 с постоянно выдвинутыми предкрылками 38 и 39. К нижней оси прикреплена нижняя пара круглых крыльев 40 и 41 с постоянно выдвинутыми подкрылками 42 и 43. Верхняя пара крыльев развернута относительно нижней пары на 90o. Крылья самолетного типа вогнуто-выпуклого сечения. Угол атаки каждого крыла α=5o. Расстояние между верхней парой крыльев и нижней h= 0,5-1 м. Двигатель 44 с муфтой сцепления 45 карданным валом 46 соединен с редуктором 47, крутящий момент от которого разделен на два потока. Первый поток идет через вариатор 48, карданный вал 49, pедуктор 50, карданные валы 51 и 52, редукторы 53 и 54 на вращение воздушных винтов. Второй поток идет через центральный дифференциал 55 с тормозными барабанами 56 и 57, карданные валы 58 и 59, уплотнительные устройства 60 и 61 на передний 62 и задний 63 дифференциалы, имеющие соответственно тормозные барабаны 64, 65 и 66, 67. Передний дифференциал карданными валами 68 и 69 через уплотнительные устройства 70 и 71 и передние редукторы соединен с передними движителями вертикального подъема. Задний дифференциал карданными валами 72 и 73 через уплотнительные 74 и 75 устройства и задние редукторы соединен с задними движителями вертикального подъема. Система устойчивости содержит гироскоп 76, потенциометры которого соединены с входом усилителя продольного наклона 77 и входом усилителя поперечного наклона 78. Выход усилителя продольного наклона электрически соединен с механизмами 79 и 80 включения тормозных колодок 81 и 82 центрального дифференциала. Выход усилителя поперечного наклона электрически соединен с механизмами 83, 84 и 85, 86 включения тормозных колодок 87,88 и 89,90 переднего и заднего дифференциалов. Ручка 91 соединена с блоком питания 92, который электрически соединен с усилителями продольного и поперечного наклона.
Работа аэродинамического судна.
При работе двигателя 44 крутящий момент через муфту сцепления 45, карданный вал 46, редуктор 47 передается на центральный дифференциал 55, с которого карданными валами 58 и 59, через передний 62 и задний 63 дифференциалы, карданные валы 68, 69 и 72, 73, редукторы 35 поступает на передние 28, 29 и задние 30, 31 движители вертикального подъема. В этом случае круглые крылья 36 и 37 передних и задних движителей вертикального подъема вращаются в одну сторону, а крылья 40 и 41 в противоположную сторону с такой же скоростью. Скорость движения воздуха по верхним поверхностям крыльев будет больше, а под нижними поверхностями меньше.
Вследствие этого над верхними поверхностями крыльев возникает разрежение, а под нижними повышенное давление, которое дополнительно увеличиваются за счет предкрылков 38, 39 и 42, 43.
Равнодействующая этих давлений - подъемная сила Pу направлена вверх и уравновешивает вес судна. Увеличением или уменьшением частоты вращения вала двигателя 44 можно изменять величину подъемной силы Pу. Как только подъемная сила превысит силу веса P, корпус судна оторвется от поверхности воды и поднимается на некоторую высоту, которая может изменяться при необходимости в больших пределах. Рычагом (не показан) включается вариатор 48 и устанавливаются необходимые обороты воздушных винтов 8 и 9. После поворота лопастей винтов на необходимых угол возникает тяга, сообщающая судну поступательную скорость. Крутящий момент при этом передается от вариатора 48 на воздушные винты через карданный вал 49, редуктор 50, карданные валы 51, 52 и редукторы 53 и 54. Путевое управление судном осуществляется отклонением струйных рулей 10 и 11 в ту или иную сторону. Торможение и движение задним ходом выполняется за счет тяги, направленной вперед при установке отрицательных углов атаки лопастей воздушных винтов. Если по каким-либо причинам, при движении судна над поверхностью воды, передняя часть корпуса опустится вниз из горизонтального положения, то датчики гироскопа 76 пошлют сигнал, соответствующий скорости и величине этого отклонения, в усилитель 77 продольной системы устойчивости. Усиленный сигнал подается на исполнительный механизм 80, который прижимает тормозную колодку 82 к тормозному барабану 57 центрального дифференциала 55. Вследствие этого частота вращения передних 28 и 29 движителей вертикального подъема возрастет, а задних 30 и 31 уменьшится. Подъемная сила в носовой части корпуса судна возрастет, а в кормовой части уменьшится и корпус займет горизонтальное положение. В случае, если носовая часть корпуса отклонится от горизонтального положения вверх, то датчики гироскопа 76, через усилитель 77, пошлют усиленный сигнал в исполнительный механизм 79, который прижмет тормозную колодку 81 к тормозному барабану 56. Частота вращения передних движителей вертикального подъема уменьшится, а задних увеличится. Подъемная сила в носовой части корпуса уменьшится, а в кормовой возрастет и корпус вновь займет горизонтальное положение. Аналогично происходит, когда отклоняется вверх или вниз кормовая часть корпуса. При отклонении правого борта вверх от горизонтального положения датчики гироскопа 76 пошлют сигнал, соответствующий скорости и величине этого отклонения на усилитель поперечной устойчивости 78. Усиленный усилителем сигнал поступает на исполнительные механизмы 85 и 86, которые прижимают тормозные колодки 89 и 90 к тормозным барабанам 64 и 66 переднего 62 и заднего 63 дифференциалов. Частота вращения переднего правого 29 и заднего правого 31 движителей вертикального подъема уменьшится, а левого переднего 28 и левого заднего 30 увеличится. Подъемная сила по правому борту судна уменьшится, а по левому увеличится и корпус судна займет горизонтальное положение. При отклонении правого борта вниз от горизонтального положения усиленный усилителем 78 сигнал от гироскопа 76 поступает на исполнительные механизмы 83 и 84, которые прижимают тормозные колодки 87 и 88 к тормозным барабанам 65 и 67. Частота вращения движителей вертикального подъема левого переднего 28 и левого заднего 30 уменьшится, а правого переднего 29 и правого заднего 31 увеличится. Подъемная сила по правому борту увеличивается, а по левому уменьшается и корпус судна вновь принимает горизонтальное положение. Аналогично действует система устойчивости при отклонении вверх или вниз левого борта корпуса судна. Механизмы приводов тормозных колодок могут быть гидравлическими с золотниками, приводящимися в движение электромагнитами, обмотки которых подключены к усилителям продольной и поперечной устойчивости. При выключенной или неисправной системе устойчивости управление положением корпуса судна в пространстве осуществляется поворотом в соответствующую сторону ручки 91 и подачей тока из блока питания 92 в механизмы привода тормозных колодок дифференциалов. Во время движения судна над поверхностью воды воздушный поток, двигаясь со скоростью V, создает разрежение в вертикальных каналах 16, 17, 20, 21 /на фиг. 11 показано пунктирными стрелками/. Из-за этого уменьшается плотность воздуха в вертикальных каналах и снижается подъемная сила крыльев. Чтобы этого не происходило, при движении судна в вертикальные каналы подается воздух под динамически напором. В передние вертикальные каналы воздух поступает через горизонтальные каналы 24 и 25, а в задние вертикальные каналы через воздухозаборники 12 и 13 и далее по горизонтальным каналам 26 и 27 /на фиг. 11 показано волнистыми стрелками/. Чтобы верхняя пара крыльев оказывала наименьшее влияние на нижнюю пару крыльев расстояние h между ними должно быть остаточно большим, на сколько это возможно. Небольшой угол атаки крыльев 36, 37, 40, 41 α = 5o выбран потому, что расстояние между двумя, движущимися друг за другом крыльев небольшое. При больших углах атаки после первого крыла будут возникать большие завихрения воздуха, попадая в которые второе крыло, двигаясь вслед за первым, будет работать в невыгодном режиме. Чтобы предотвратить попадание воды внутрь корпуса судна, в моменты, когда оно находится на плаву, подвод мощности к движителям вертикального подъема осуществляется через уплотнительные устройства 60, 61, 70, 71, 74, 75.
Предлагаемое судно может быть использовано для доставки людей и грузов в труднодоступные районы.
Предлагаемое изобретение обеспечивает экономию топлива при меньших затратах мощности, повышение грузоподъемности и безопасности при эксплуатации, более высокую проходимость при движении через мели, пороги и перекаты, а также при многобальном волнении, меньшее влияние на окружающую среду.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2005 |
|
RU2289519C1 |
| Аэродинамическое судно | 2015 |
|
RU2609577C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 1999 |
|
RU2149109C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2011 |
|
RU2470808C1 |
| Аэродинамическое судно | 2019 |
|
RU2710040C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2007 |
|
RU2328391C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2013 |
|
RU2538484C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2006 |
|
RU2301750C1 |
| Аэродинамическое судно | 2016 |
|
RU2611676C1 |
| АЭРОМОБИЛЬ | 2019 |
|
RU2715099C1 |
Изобретение относится к судостроению и касается создания аэродинамических транспортных судов. Судно содержит корпус со сквозными вертикальными каналами. Каналы выполнены по два в носовой и кормовой частях корпуса. Судно имеет движители горизонтального перемещения, движители вертикального подъема, размещенные в вертикальных каналах, двигатель, установленный внутри корпуса и кинематически связанный с движителями, и систему управления устойчивостью движения судна. Каждый движитель вертикального подъема выполнен в виде винта с двумя парами лопастей крыльчатого профиля, установленных с возможностью вращения в противоположном направлении. Каждая лопасть снабжена предкрылком. Механическая связь двигателя с движителями вертикального подъема выполнена через управляемые дифференциалы с тормозным устройством. Система управления устойчивостью движения судна электрически связана с упомянутыми тормозными устройствами управляемых дифференциалов. Технический результат реализации изобретения заключается в улучшении эксплуатационных качеств аэродинамического судна. 11 ил.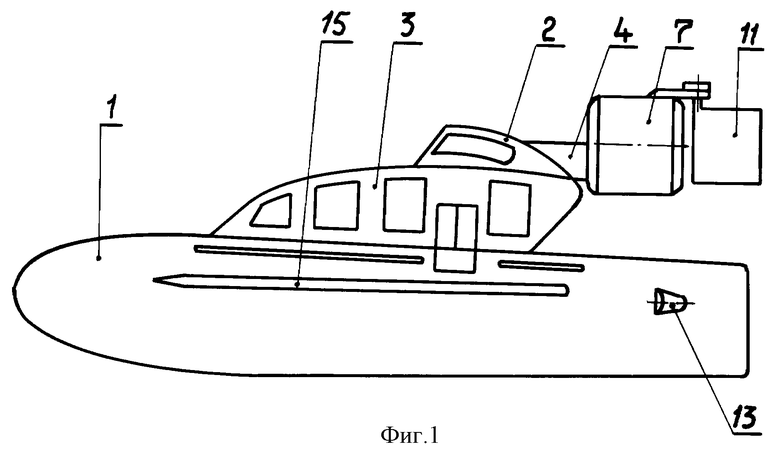
Аэродинамическое судно, содержащее корпус со сквозными вертикальными каналами, выполненными по два в носовой и кормовой частях корпуса, движители горизонтального перемещения, движители вертикального подъема, размещенные в вертикальных каналах, двигатель, установленный внутри корпуса и кинематически связанный с движителями, и систему управления устойчивостью движения судна, отличающееся тем, что, с целью улучшения эксплуатационных качеств, каждый движитель вертикального подъема выполнен в виде винта с двумя парами лопастей крыльчатого профиля, установленных с возможностью вращения в противоположном направлении, при этом каждая лопасть снабжена предкрылком, причем механическая связь двигателя с движителями вертикального подъема выполнена через управляемые дифференциалы с тормозным устройством, а система управления устойчивостью движения судна электрически связана с упомянутыми тормозными устройствами управляемых дифференциалов.
| US 4043421 A, 23.08.1977. |
