Изобретение относится к автоматизированным системам идентификации объектов, представленных в виде цифровых двумерных изображений, в том числе изображений низкого качества (низкое качество изображений может быть обусловлено удаленностью или малыми размерами объектов, неблагоприятными для регистрации изображений внешними условиями). Изобретение может быть использовано в дистанционном контроле наблюдаемой обстановки, разведке и дешифрировании для поддержки работы оператора, в дистанционном контроле при отбраковке изделий, а также при автоматизированной идентификации по геометрической форме микробиологических объектов и т.д.
Идентификация (распознавание в рамках известного алфавита) объектов по их цифровым двумерным изображениям обычно проводится на основе признаковых описаний. Используются яркостные, текстурные, геометрические и другие признаки, а также гистограммы распределений яркости и спектры пространственных частот (У. Прэтт. Цифровая обработка изображений. Том 2. Пер. с анг. - М. : Мир, 1982, с. 492). В настоящее время широкое применение находят геометрические признаки, причем они используются как самостоятельно, так и в сочетании с другими признаками. Различают локальные геометрические признаки в виде характерных примитивов - угловых элементов контура изображения объекта и геометрические признаки, описывающие глобальные свойства формы объекта. В первом случае так называемый алфавит геометрических описаний состоит из набора примитивов. Часто используются локальные инвариантные признаки, представляющие углы между отрезками контура, изломы, разветвления, дуги и т. д. Во втором случае для описания изображений объектов находят применение метрические признаки, которые описывают такие свойства объектов как размер (признаки: площадь, периметр, стороны описанного прямоугольника, диаметр и ширина объекта, хорды), форма (признаки: отношение толщины, отношение аспекта или эксцентриситет), местоположение объекта (признак: координаты центра тяжести), ориентация (признак: угол между главной осью инерции фигуры и одной из осей координат). Часто используются метрические признаки, инвариантные к геометрическим преобразованиям типа сдвига, поворота и изменения масштаба. В обоих случаях идентификация осуществляется путем сравнения признаков текущего изображения объекта с признаками эталонов - объектов алфавита, хранящихся в базе данных (в памяти компьютерной системы). Сравнение обычно происходит с помощью некоторой метрики в пространстве признаков.
Известен патент Российской Федерации (РФ 92010391 6 G 06 К 9/00. Е.А. Засухин. Способ распознавания графического образа материального объекта), описывающий способ определения характеристик материального объекта по его графическому образу средствами искусственного интеллекта на базе ЭВМ. Цель достигается за счет декомпозиции графического образа на элементарные образы составляющих его геометрических примитивов, образуемых элементарными точками, каждая из которых определяется пространственными или временными координатами, яркостью и цветом, с последующим синтезом описаний образов геометрических примитивов и идентификацией полученного образа материального объекта по принципу подобия с различными образами материальных объектов, хранимых в памяти искусственного интеллекта в виде моделей. Недостатками способа являются низкая эффективность работы по зашумленным дискретным изображениям (низкая помехоустойчивость локальных признаков), необходимость работы с большой базой данных и вычислительная сложность используемых процедур. Кроме этого данный способ не позволяет разделять обрабатываемую информацию на достоверную и недостоверную и эффективно использовать каждую из них.
Известен способ идентификации объектов по их изображениям (Б.В. Анисимов, В. Д. Курганов, В.К. Злобин. Распознавание и цифровая обработка изображений. - М. : Высшая школа, 1983, с. 71), в котором используются инвариантные к преобразованиям сдвига, поворота и изменения масштаба метрические признаки в виде следующих пяти соотношений: x1 = а·b/S, x2 = a/b,  x4 = P/а, x5 = P/b, где а и b - большая и меньшая стороны минимального по площади прямоугольника, описанного вокруг объекта; S и P - площадь и периметр объекта соответственно. Если значения указанных пяти признаков откладывать по осям соответствующих координат, то в пятимерном пространстве признаков объекту будет соответствовать точка (или вектор), инвариантная к указанным выше преобразованиям. Идентификация изображения объекта осуществляется путем сравнения его признакового описания с эталонными описаниями объектов алфавита. К недостаткам данного способа идентификации относятся следующие: разделительные возможности используемых признаков ограничены, в том числе из-за отсутствия признака, описывающего степень симметричности формы объектов; помехоустойчивость всех пяти признаков невелика, поскольку определение каждого из них включает измерение или длин отрезков на изображении или периметра изображения объекта; не принимается во внимание тот факт, что в компьютерных системах идентификации используются не сами инвариантные признаки, а их неинвариантные оценки, и, соответственно, не учитывается зависимость оценок метрических признаков от размера дискретного изображения объекта.
x4 = P/а, x5 = P/b, где а и b - большая и меньшая стороны минимального по площади прямоугольника, описанного вокруг объекта; S и P - площадь и периметр объекта соответственно. Если значения указанных пяти признаков откладывать по осям соответствующих координат, то в пятимерном пространстве признаков объекту будет соответствовать точка (или вектор), инвариантная к указанным выше преобразованиям. Идентификация изображения объекта осуществляется путем сравнения его признакового описания с эталонными описаниями объектов алфавита. К недостаткам данного способа идентификации относятся следующие: разделительные возможности используемых признаков ограничены, в том числе из-за отсутствия признака, описывающего степень симметричности формы объектов; помехоустойчивость всех пяти признаков невелика, поскольку определение каждого из них включает измерение или длин отрезков на изображении или периметра изображения объекта; не принимается во внимание тот факт, что в компьютерных системах идентификации используются не сами инвариантные признаки, а их неинвариантные оценки, и, соответственно, не учитывается зависимость оценок метрических признаков от размера дискретного изображения объекта.
Известен способ идентификации наземных объектов военной техники (ВТ) по их тепловым (FLIR) изображениям с использованием метрических признаков (J.M. DeCatrel, J. R. Surdu. Practical recognition vehicles in FLIR. - In Proc. SPIE, Automatic Object Recognition V, vol. 2485, 1995, Orlando, Florida, p. p. 200-208). В данном способе на основе экспериментальных исследований выбраны для построения характеристического вектора в пространстве признаков шесть следующих базовых точек изображения объекта ВТ: центр тяжести (нулевой момент), наиболее удаленные от центра верхняя и нижняя, правая и левая крайние точки корпуса объекта ВТ, правая и левая крайние точки башни (если таковая имеется). На их базе вычисляются следующие шесть инвариантных признаков - отношений между парами горизонтальных и вертикальных отрезков: 1) отношение длины башни к длине корпуса, 2) отношение проекции расстояния до крайней верхней точки корпуса к высоте объекта, 3) отношение проекции расстояния до крайней нижней точки корпуса к высоте объекта, 4) отношение проекции расстояния до башни к высоте объекта, 5) отношение проекции расстояния до правой крайней точки корпуса к длине объекта, 6) отношение проекции расстояния до крайней левой точки корпуса к длине объекта. Центр тяжести и характерные крайние точки изображения объекта определяются с помощью стандартных процедур. Идентификация объектов строится на сравнении характеристического вектора распознаваемого объекта с эталонными векторами. Распознающая система, разработанная на основе предложенного способа и обученная на определенном алфавите объектов, наблюдаемых под конкретными ракурсами, при переходе к произвольным (в пределах допустимых углов) ракурсам требует дополнительной настройки экспертной системы в части задания весовых коэффициентов для некоторых составляющих характеристического вектора. Недостатком данного способа является низкая помехоустойчивость всех шести признаков, поскольку определение каждого из них включает измерение длин отрезков на изображении (система показала себя работоспособной лишь при хорошем качестве изображений). Другим недостатком способа является неучет зависимости оценок метрических признаков от величины размера дискретных изображений объектов, что снижает точность геометрических описаний изображений объектов и, соответственно, общую эффективность распознавания.
Известен патент ЕПВ (ЕР) (N 0281725 4 G 06 К 9/46. Steven L. Horowitz. Method and apparatus for generating size and orientation invariant shape features), представляющий способ формирования признаков формы изображения символа, инвариантных относительно размера и ориентации. В данном способе выделяют по выбранному изображению группу признаков, инвариантных относительно размера и поворота, и направляют их в дерево (блок) принятия статистических решений для автоматической идентификации символа. Набор выделенных признаков содержит группу признаков, полученных путем формирования матриц, представляющих размеры и другие геометрические величины шести минимально охватывающих прямоугольников, повернутых относительно символа, в том числе расстояния между центрами повернутых ограничивающих прямоугольников. Кроме первой группы формируют вторую группу признаков, создавая группу матриц, представляющих позиции элементов изображения, расположенных по периметру, длины радиусов и коды направлений. Недостатком является низкая помехоустойчивость признаков, поскольку определение каждого из них включает измерение длин отрезков на изображении. Другим недостатком способа формирования признаков формы является неучет зависимости оценок метрических признаков от величины размера дискретного изображения символа, что снижает точность геометрических описаний изображений символов и, соответственно, общую эффективность идентификации.
Известен патент США (US 4156231 G 06 К 9/00. Kunihiko Edamatsu, Yasukazu Sano. Automated pattern inspection system), описывающий способ для определения дефектов структуры исследуемого объекта. Данный способ предназначен для определения дефектов структуры объекта на основе сравнения метрических характеристик его дискретного изображения с эталонными характеристиками. Это выполняется следующим образом. Измеряется значение площади дискретного изображения объекта и вычисляется величина, представляющая квадрат его периметра. Выделяется контур дискретного изображения объекта и вычисляется квадрат его периметра. Вычисляется разность между двумя полученными выше значениями квадрата периметра, которое сравнивается с эталонным значением. Недостатком является низкая помехоустойчивость используемой метрической характеристики - периметра. Другим недостатком является неучет зависимости получаемых оценок периметра дискретного изображения объекта от размера изображения, что снижает точность определения дефектов структуры объекта данным способом.
Наиболее близким к заявляемому способу идентификации материальных объектов является патент США (US 5546475А 6 G 06 К 9/46. R.M. Bolle, J.H. Connell, К Haas, R. Mohan, G. Taubin. "Система для распознавания изделий"), который выбран за прототип и в котором заявлен способ для идентификации изделий по их цифровым двумерным изображениям. Данный способ предусматривает формирование с помощью технических средств цифровых двумерных изображений места действия, освещаемого немонохроматическим источником света, и их обработку с использованием компьютерной системы. Изображение места действия содержит изображение объекта и изображение фона. С помощью процедуры сегментации из изображения места действия выделяют изображение объекта. Компьютерная система вычисляет нормированные (со значениями в диапазоне от 0 до 1) признаки, связанные с сегментированным изображением выделенного объекта. Нормированные признаки в общем случае включают наборы гистограмм яркости, формы, текстуры и др. сегментированного изображения объекта. Соответственно как идентифицируемый объект так и каждый из объектов алфавита, описанный таким набором гистограмм, представляет характеристический вектор в многомерном признаковом пространстве. Нормированные признаки сегментированного изображения выделенного объекта сравнивают с соответствующими эталонными нормированными признаками (признаками объектов алфавита), хранящимися в памяти компьютерной системы, и относят идентифицируемый объект к тому объекту алфавита, расстояние в признаковом пространстве до которого наименьшее (правило "ближайшего соседа"). Недостатками способа являются: низкая помехоустойчивость применяемых признаков и как следствие эффективная идентификация объектов по изображениям только хорошего качества; необходимость работы с большой базой данных для описания наборов разнородных гистограмм; применение решающих правил, в которых информация, передаваемая в виде признаков-гистограмм, не разделяется на достоверную и недостоверную и соответственно используется недостаточно эффективно.
Указанные недостатки обусловлены следующими причинами. Первые две причины обусловлены использованием гистограмм в качестве признакового описания сегментированных изображений объектов. Привлекаемая для описания той или иной характеристики изображения гистограмма представляет собой распределение значений этой характеристики, рассчитанное по всему изображению объекта или его отдельному фрагменту. Если разделить диапазон значений характеристики (обычно от 0 до 1) на N интервалов, то гистограмма показывает количество пикселов (элементов разложения) изображения со значениями данной характеристики, лежащими внутри каждого из N интервалов. Шумы и искажения изображения могут существенным образом изменить гистограмму. В памяти компьютерной системы каждая диаграмма описывается большим массивом значений. Разделение обрабатываемой информации на достоверную и недостоверную и использование той и другой осуществляется применением "нечетких" решающих правил (К. Верхаген, Р. Дейн, Ф. Грун и др. Распознавание образов: состояние и перспективы. Пер. с англ. - М.: Радио и связь, 1985, с. 49). Применяемое в прототипе решающее правило таковым не является.
Предлагаемый нами способ позволяет устранить указанные недостатки. Для описания изображений объектов в качестве базовых используются признаки, описывающие глобальные свойства формы и инвариантные к преобразованиям сдвига, поворота и изменения масштаба; в их число входят признаки (например, коэффициенты симметрии), для определения которых применяются, исключительно метрические характеристики в виде площади изображения и его фрагментов. Последние более устойчивы к шумам и искажениям изображений, чем длины отрезков. Кроме этого, учитывается неинвариантность оценок признаков формы дискретных изображений, в том числе зависимость оценок признаков от размера дискретного изображения объекта. Используется компактное описание объектов алфавита в многомерном признаковом пространстве в виде характеристических объемов, проекции которых на каждую ось - признак характеризуются только парой чисел (средним значением и среднеквадратическим отклонением). Применяется нечеткое решающее правило с вычислением мер доверия к гипотезам об отнесении распознаваемого объекта к одному из объектов алфавита, которое позволяет разделять обрабатываемую информацию на достоверную и недостоверную и эффективно использовать каждую из них.
Заявляется способ идентификации материальных объектов, включающий формирование цифровых двумерных изображений объектов с помощью технических устройств, получение с помощью компьютерной системы сегментированных изображений объектов, измерение характеристик сегментированного изображения выбранного объекта и вычисление на их основе нормированных признаков, сравнение вычисленных значений нормированных признаков сегментированного изображения выбранного объекта с хранящимися в памяти компьютерной системы нормированными признаками сегментированных изображений объектов алфавита и идентификацию выбранного объекта на основе данных сравнения, в котором автоматически по единственному сегментированному изображению объекта алфавита генерируют обучающую выборку с использованием операций поворота и изменения масштаба, формируют в памяти компьютерной системы описания нормированных признаков формы объектов алфавита в виде функциональных зависимостей статистических оценок признаков от размера сегментированных изображений объектов алфавита, измеряют размеры и вычисляют нормированные признаки формы выбранного для идентификации сегментированного изображения объекта, в соответствии с измеренным размером сегментированного изображения выбранного объекта выбирают хранящиеся в памяти компьютерной системы значения статистических оценок нормированных признаков формы объектов алфавита и выполняют идентификацию выбранного объекта на основе данных сравнения. С целью разделения обрабатываемой информации на достоверную и недостоверную и ее эффективного использования вычисляют меры доверия к каждой из возможных гипотез идентификации с использованием данных о расстояниях в признаковом пространстве, вычисленных с учетом размера сегментированного изображения выбранного объекта, фиксируют результат идентификации сегментированного изображения выбранного объекта в виде ранжированного по величине ненулевых мер доверия списка гипотез об отнесении данного объекта к одному из объектов алфавита, или в виде гипотезы, соответствующей максимальной мере доверия.
Заявленный способ реализуют следующим образом:
1. Автоматически по единственному сегментированному изображению каждого объекта алфавита генерируют обучающую выборку с использованием операций поворота и изменения масштаба.
2. Формируют в памяти компьютерной системы описания нормированных признаков формы объектов алфавита в виде функциональных зависимостей средних значений оценок признаков и их среднеквадратических отклонений от размера сегментированных изображений объектов, равного числу пикселов (элементов разложения технического устройства), приходящихся на наблюдаемую проекцию объектов.
3. Регистрируют с помощью технических устройств цифровые изображения идентифицируемых объектов.
4. Выполняют сегментацию изображений идентифицируемых объектов и измеряют их размеры.
5. Выбирают хранящиеся в памяти средние значения оценок нормированных признаков формы объектов алфавита и их среднеквадратические отклонения, которые соответствуют измеренному размеру выбранного сегментированного изображения объекта.
6. Вычисляют расстояния в признаковом пространстве до каждого из объектов алфавита с учетом размера выбранного сегментированного изображения идентифицируемого объекта.
7. Вычисляют меры доверия к каждой из возможных гипотез идентификации с учетом вычисленных расстояний в признаковом пространстве и величин среднеквадратических отклонений средних значений нормированных признаков формы объектов алфавита.
8. Фиксируют результат идентификации выбранного сегментированного изображения объекта в виде списка гипотез, ранжированного по величине ненулевых мер доверия, или в виде гипотезы, соответствующей максимальной мере доверия.
При этом достигается технический результат, выражающийся в автоматизированном распознавании объектов (в рамках заданного алфавита) по их цифровым двумерным изображениям, в том числе изображениям низкого качества, с вероятностями, близкими к вероятностям зрительного распознавания. Низкое качество цифровых изображений может быть обусловлено удаленностью или малыми размерами объектов, а также неблагоприятными для регистрации изображений внешними условиями.
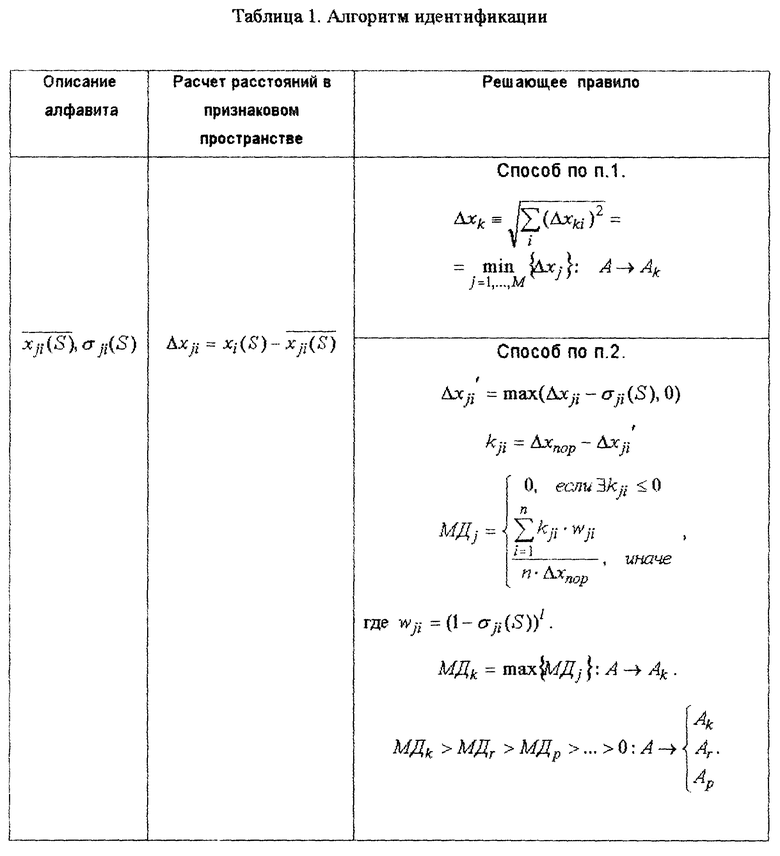
Цифровому (дискретному) изображению объекта свойственна изменчивость значений оцениваемых признаков вследствие шумов, искажений и действия ряда других факторов, вплоть до метода оценки признаков. Нами впервые было экспериментально показано, что существует зависимость оценок метрических признаков от размера дискретного изображения. Эту зависимость мы используем при формировании признакового описания объектов алфавита, при вычислении расстояний в признаковом пространстве, при определении весовых коэффициентов, с помощью которых регулируется вклад отдельных метрических признаков в суммарную оценку мер доверия к гипотезам об отнесении распознаваемого объекта к одному из объектов алфавита. В применяемом наборе нормированных признаков формы (со значениями в диапазоне от 0 до 1) используются наряду с известными (отношением толщины и отношением аспекта) новые признаки, в частности коэффициент симметрии, которые определяются исключительно на основе метрических характеристик в виде площади сегментированного изображения или его фрагментов. Последние более устойчивы к шумам и искажениям изображений. Если рассматривать точку, соответствующую объекту, как случайную величину, то характеристический объем будет описываться плотностью распределения этой случайной величины. Определение вида плотности распределения является достаточно непростой задачей, в том числе вследствие зависимости оценок признаков от размера объекта и метода оценивания. Предлагаемый способ отличается отсутствием требований на априорное знание вида плотности распределения объектов алфавита в признаковом пространстве, поскольку само распределение задается обучающей выборкой значений признаков формы {xji} (xji - значение i-го признака для j-го объекта). Обучающая выборка генерируется автоматически по одному сегментированному изображению с применением операций поворота и изменения масштаба. Результатом обучения является достаточно точное и компактное описание алфавита объектов с использованием функциональных зависимостей среднего значения каждого признака  и его среднеквадратического отклонения (СКО) σji от размера S объекта (размер S определяется числом элементов разложения (пикселов), приходящихся на наблюдаемую проекцию объекта). Соответственно положение центра тяжести и форма характеристического объема для каждой эталонной точки в признаковом пространстве определяются размером сегментированного изображения идентифицируемого объекта. Проекции Δxji - расстояния в признаковом пространстве до j-й эталонной точки (соответствующей j-му объекту алфавита, j = 1,...,M) вычисляют с учетом размера сегментированного изображения идентифицируемого объекта (см. таблицу). В этом смысле заявленный способ является адаптивным. Используется нечеткое решающее правило с вычислением мер доверия к гипотезам Aj об идентификации объекта. Нечеткое решающее правило включает вычисление меры доверия МДj (с использованием полученных оценок расстояний в признаковом пространстве) к каждой из возможных гипотез идентификации. Гипотезы с нулевой мерой исключаются из дальнейшего рассмотрения, остальные ранжируются по величине меры доверия. Результатом идентификации является (в зависимости от типа системы) или ранжированная в соответствии с мерами доверия последовательность гипотез, или гипотеза с максимальной МД. С помощью весового коэффициента ωji, величина которого зависит от σji (и соответственно, от размера S), регулируется вклад отдельных признаков в суммарную оценку меры доверия к гипотезам. Величины Δxкор и l в таблице являются параметрами алгоритма, первый из которых характеризует чувствительность алгоритма к шумам, а второй определяет степень влияния отдельных признаков в зависимости от СКО их оценок. Значения величин Δxкор i экспериментально установлены как равные 0,1 и 8 соответственно.
и его среднеквадратического отклонения (СКО) σji от размера S объекта (размер S определяется числом элементов разложения (пикселов), приходящихся на наблюдаемую проекцию объекта). Соответственно положение центра тяжести и форма характеристического объема для каждой эталонной точки в признаковом пространстве определяются размером сегментированного изображения идентифицируемого объекта. Проекции Δxji - расстояния в признаковом пространстве до j-й эталонной точки (соответствующей j-му объекту алфавита, j = 1,...,M) вычисляют с учетом размера сегментированного изображения идентифицируемого объекта (см. таблицу). В этом смысле заявленный способ является адаптивным. Используется нечеткое решающее правило с вычислением мер доверия к гипотезам Aj об идентификации объекта. Нечеткое решающее правило включает вычисление меры доверия МДj (с использованием полученных оценок расстояний в признаковом пространстве) к каждой из возможных гипотез идентификации. Гипотезы с нулевой мерой исключаются из дальнейшего рассмотрения, остальные ранжируются по величине меры доверия. Результатом идентификации является (в зависимости от типа системы) или ранжированная в соответствии с мерами доверия последовательность гипотез, или гипотеза с максимальной МД. С помощью весового коэффициента ωji, величина которого зависит от σji (и соответственно, от размера S), регулируется вклад отдельных признаков в суммарную оценку меры доверия к гипотезам. Величины Δxкор и l в таблице являются параметрами алгоритма, первый из которых характеризует чувствительность алгоритма к шумам, а второй определяет степень влияния отдельных признаков в зависимости от СКО их оценок. Значения величин Δxкор i экспериментально установлены как равные 0,1 и 8 соответственно.
На нашем предприятии заявленный способ идентификации материальных объектов по их изображениям практически реализован в автоматизированной системе признакового распознавания (идентификации), структурная схема ее программной подсистемы приведена на фиг. 1. Внешний вид окна программы изображен на фиг. 2. Внутри рабочей области этого окна открыты 5 окон, первые четыре из которых отображают отдельные части документа программы: 1) алфавит распознаваемых объектов (геометрические фигуры) и перечень используемых при распознавании признаков формы; 2) полутоновое изображение; 3) сегментированное изображение с помеченным текущим объектом; 4) признаковое описание текущего сегментированного объекта; 5) результаты распознавания текущего сегментированного объекта. Эффективность заявленного способа идентификации исследовалась в задаче распознавания 10 разных геометрических фигур на полутоновом зашумленном изображении. Все фигуры компактные, среди них есть симметричные относительно обеих внутренних осей координат и симметричные относительно одной оси. Площадь каждой из фигур составляла примерно 7 x 7 элементов разложения (49 пикселов), отношение сигнала к шуму для элемента разложения равнялось примерно 7. В качестве геометрических признаков формы были выбраны следующие три безразмерные характеристики: отношение толщины х1, отношение аспекта x2, коэффициент симметрии относительно одной из внутренних осей координат x3=x3Y. Отношение толщины x1 определялось отношением площади объекта к квадрату его периметра, умноженным на 4 π. Для оценок отношения аспекта x2 и коэффициента симметрии x3 цифрового изображения объекта вводилась внутренняя система координат.
Началом ее являлся центр тяжести фигуры, направление оси X определялся углом Θ, совпадающим с направлением главной оси симметрии, а направление оси Y задается углом Θ+π2. Отношение аспекта x2 определялось отношением сторон описанного прямоугольника (его стороны параллельны осям внутренней системы координат). Коэффициент симметрии x3 определялся отношением площадей пересечения и объединения изображения объекта и его симметричного отображения относительно внутренней оси координат. Перед оценкой признаков выполнялась пороговая сегментация полутоновых изображений объектов с последующей разметкой односвязных компонент. В качестве результата работы заявленного способа идентификации с нечетким решающим правилом принималась гипотеза с максимальной оценкой меры доверия. Были получены следующие результаты в виде средней по 10 фигурам вероятности правильной идентификации: способ с классическим решающим правилом ближайшего соседа - 38,7%, заявленный способ - 55,0%, зрительное распознавание этих же сегментированных изображений геометрических фигур - 61,7%. Результаты идентификации заявленным способом превосходят результаты, достигнутые с помощью правила ближайшего соседа, и практически не уступают возможностям зрительного распознавания этих же сегментированных изображений геометрических фигур.
Преимущества предлагаемого способа по сравнению с прототипом состоят в следующем:
1. Для описания изображений объектов в качестве базовых используются признаки, описывающие глобальные свойства формы и являющиеся более устойчивыми к шумам и искажениям изображений, чем признаки - гистограммы распределения яркости; учитывается неинвариантность оценок признаков формы, в том числе их зависимость от размера дискретного изображения объекта.
2. Используется компактное описание объектов алфавита в многомерном признаковом пространстве в виде характеристических объемов, проекции которых на каждую ось - признак характеризуются только парой чисел (средним значением и среднеквадратическим отклонением); используется обучающая выборка, генерируемая автоматически по единственному изображению с использованием операций поворота и изменения масштаба.
3. Применяется нечеткое решающее правило с вычислением мер доверия к гипотезам об отнесении распознаваемого объекта к одному из объектов алфавита; данное правило в отличие от правила ближайшего соседа позволяет разделять обрабатываемую информации на достоверную и недостоверную и более эффективно использовать каждую из них.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО ПОЛУЧЕНИЯ ИНФОРМАЦИИ ОБ ОБЪЕКТАХ И СЦЕНАХ (ВАРИАНТЫ) | 1998 |
|
RU2135955C1 |
| ЛИНЗА С КОРРЕКЦИЕЙ АБЕРРАЦИЙ | 1999 |
|
RU2174245C2 |
| СПОСОБ ПОЛУЧЕНИЯ ФРАКТАЛОПОДОБНЫХ СТРУКТУР И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2180160C1 |
| ОБЪЕКТИВ С ВЫНЕСЕННЫМ ВХОДНЫМ ЗРАЧКОМ | 1999 |
|
RU2172970C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОГО СМЕЩЕНИЯ ОБЪЕКТА | 1999 |
|
RU2155321C1 |
| ТЕЛЕСКОПИЧЕСКАЯ СИСТЕМА ДЛЯ ФОКУСИРОВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2000 |
|
RU2167444C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА ПРОПУСКАНИЯ ОПТИЧЕСКОЙ ПЛАСТИНЫ | 1999 |
|
RU2172945C2 |
| СВЕТОВОЗВРАЩАТЕЛЬ | 1997 |
|
RU2149431C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИУСА КРИВИЗНЫ ДЛИННОФОКУСНОГО ЗЕРКАЛА | 1999 |
|
RU2159928C1 |
| ИМПУЛЬСНО-ПЕРИОДИЧЕСКИЙ ГАЗОВЫЙ ЛАЗЕР | 2000 |
|
RU2173497C1 |
Изобретение относится к автоматизированным системам идентификации объектов и обеспечивает технический результат в виде повышения помехоустойчивости и снижения объема используемой базы данных. Способ включает в себя формирование цифровых двумерных изображений объектов, получение с помощью компьютерной системы сегментированных изображений объектов, измерение характеристик сегментированного изображения выбранного объекта, вычисление на их основе нормированных признаков, сравнение их с хранящимися в памяти компьютерной системы нормированными признаками сегментированных изображений объектов алфавита и идентификацию объекта на основе данных сравнения. Технический результат достигается благодаря тому, что по сегментированному изображению объекта алфавита генерируют обучающую выборку с использованием операций поворота и изменения масштаба, формируют в памяти компьютерной системы описания нормированных признаков формы объектов алфавита в виде функциональных зависимостей статистических оценок признаков от размера сегментированных изображений объектов алфавита, измеряют размеры и вычисляют нормированные признаки формы выбранного объекта, в соответствии с измеренным размером выбирают хранящиеся в памяти компьютерной системы значения статистических оценок нормированных признаков формы объектов алфавита и выполняют идентификацию выбранного объекта на основе данных сравнения. 1 з.п. ф-лы, 2 ил., 1 табл.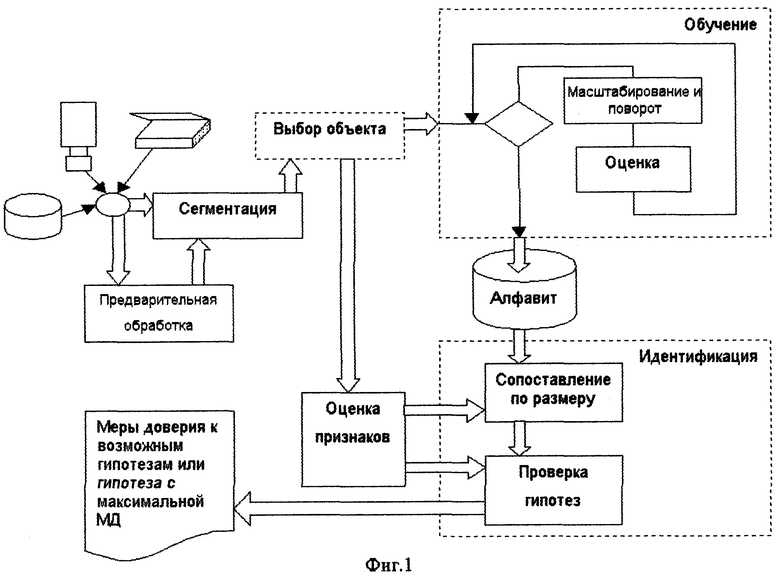
| US 5546475 A, 13.08.1996 | |||
| RU 92010391 A, 10.12.1996 | |||
| US 4156231 A, 22.05.1979 | |||
| 0 |
|
SU281725A1 | |
| ПРЭТТ У | |||
| Цифровая обработка изображений | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| АНИСИМОВ Б.В | |||
| и др | |||
| Распознавание и цифровая обработка изображений | |||
| - М.: Высшая школа, 1983, с.71. | |||

