Изобретение относится к электрическим системам усилителя рулевого управления и может использоваться в качестве электрического блока усилителя рулевого управления транспортного средства, преимущественно автомобиля.
Известно техническое решение усилителя рулевого управления с серводвигателем, описанное в заявке ЕПВ N 0361726 (публ. 04.04.90 г.). Усилитель содержит электрический блок, состоящий из реверсивного электродвигателя, предназначенного для создания дополнительного усилия на рулевом валу, а также систему управления электродвигателем по сигналу датчика момента. Электрический блок включает в себя два датчика величины тока, каждый из которых соединен с одним из полюсов электродвигателя и реагирует на ток одного направления.
Недостатком описанного устройства является усложнение его конструкции, в которой использованы два датчика тока.
Наиболее близким по технической сущности является электрический блок усилителя рулевого управления, описанный в заявке Великобритании N 2170764 (публ. 13.08.86 г. ). В известном рулевом управлении реверсивный электрический двигатель создает дополнительный крутящий момент, усиливающий крутящий момент, прилагаемый к рулевому колесу водителем. Крутящий момент, создаваемый водителем, определяется датчиком момента. Электродвигатель включается через систему управления и силовую мостовую схему в зависимости от величин сигналов с датчика момента и датчика скорости транспортного средства. Система управления замкнута через электрический контур, в составе которого использован датчик тока, подающий сигнал, соответствующий величине тока, проходящего через электродвигатель, обратно на вход контура. Датчик тока охватывает якорную цепь электродвигателя. В случае перегрузки компаратор, реагирующий на проходящий через электродвигатель ток, подает сигнал блокировки на вход системы управления.
В качестве датчиков тока в цепи питания якоря электродвигателя, работающего в составе электрического блока усилителя рулевого управления транспортного средства, обычно используются шунт или датчик на эффекте Холла.
Описанный электрический блок, в котором используются датчики тока, установленные в якорной цепи электродвигателя, недостаточно надежен, поскольку в нем отсутствует защита элементов силовой мостовой схемы от сквозного тока.
Задачей изобретения является повышение надежности электрического блока усилителя рулевого управления.
Указанная задача решается способом работы электрического блока усилителя рулевого управления, по которому в соответствии с сигналами датчиков крутящего момента на рулевом валу и скорости транспортного средства управляют работой реверсивного электродвигателя, причем сигналы датчиков подают на входы системы управления, а с выходов снимают управляющий сигнал, который подают на силовую мостовую схему включения электродвигателя, сигнал о величине тока в якоре которого определяют датчиком тока и через замкнутый контур подают на вход системы управления, при этом в качестве датчика тока используют трансформатор тока, первичную обмотку которого включают в цепь прерывистого тока между силовой мостовой схемой и источником питания, а со вторичной обмотки снимают сигнал о величине тока, в состав системы управления включают микропроцессор, на который подают сигналы датчиков, и аналоговую часть, с выходов которой снимают управляющий сигнал, причем сигнал о величине тока со вторичной обмотки трансформатора подают через выпрямитель и интегрирующую цепь на вход микропроцессора системы управления, а через выпрямитель и делитель - на вход аналоговой части системы управления.
При определении тока перегрузки предпочтительно блокируют управляющий сигнал с выхода аналоговой части системы управления.
Сигнал о величине тока со вторичной обмотки трансформатора отсекают до напряжения питания микропроцессора преимущественно через выпрямитель и схему, содержащую резистор и диод, цепь соединения которых подключают к логическому входу микропроцессора системы управления.
В момент коммутации силовой мостовой схемы при отсутствии логического сигнала на входе микропроцессора с его выхода подают сигнал на отключение питания электродвигателя.
Указанная задача решается также устройством электрического блока усилителя рулевого управления, содержащим реверсивный электродвигатель, силовую мостовую схему его включения, соединенную с выходами системы управления, по крайней мере часть входов которой предназначены для подключения датчиков крутящего момента на рулевом валу и скорости транспортного средства, а также замкнутый электрический контур с датчиком тока электродвигателя, причем датчик тока выполнен в виде трансформатора тока, первичная обмотка которого включена в цепь прерывистого тока электродвигателя, а вторичная обмотка, к выводам которой подключен конденсатор, через выпрямитель, интегрирующую цепь и делитель подключена к системе управления.
Система управления может содержать микропроцессор, по крайней мере часть входов которого предназначена для подключения датчиков, а часть выходов соединена с входами аналоговой части системы управления, выходы которой подключены к силовой мостовой схеме включения электродвигателя.
Силовая мостовая схема включения электродвигателя выполнена, как правило, в виде мостовой транзисторной схемы.
Силовая мостовая схема включения электродвигателя соединена с источником питания предпочтительно через электронное реле, которое подключено к выходу микропроцессора.
Реле установлено преимущественно в цепи питания между датчиком тока и источником питания.
Вторичная обмотка трансформатора тока через выпрямитель и интегрирующую цепь может быть подключена к входу микропроцессора системы управления.
Вторичная обмотка трансформатора тока через выпрямитель и делитель подключена предпочтительно к входу аналоговой части системы управления.
Вторичная обмотка трансформатора тока, как правило, подключена к питанию микропроцессора через выпрямитель и схему, содержащую резистор и диод, цепь соединения которых подключена к логическому входу микропроцессора системы управления.
Приведенная совокупность признаков в сравнении с известным уровнем техники позволяет сделать вывод о соответствии заявляемого технического решения условию "новизна". В то же время совокупность отличительных признаков, приводящая к решению поставленной задачи, явным образом не следует из известного уровня техники, поэтому заявляемое техническое решение соответствует условию "изобретательский уровень".
Изобретение поясняется чертежом, на котором показана схема электрического блока усилителя рулевого управления.
Электрический блок усилителя рулевого управления состоит из реверсивного электродвигателя 1, силовой мостовой схемы 2 его включения, системы 3 управления и замкнутого электрического контура 4 с датчиком 5 тока электродвигателя 1. По крайней мере часть входов системы 3 управления предназначена для подключения датчика 6 крутящего момента на рулевом валу и датчика 7 скорости транспортного средства. Дополнительно могут быть использованы сигналы датчика 8 положения колес и датчика 9 оборотов двигателя. Система 3 управления, как правило, содержит микропроцессор 10 и аналоговую часть 11. По крайней мере часть входов микропроцессора 10 предназначена для подключения датчиков 6-9, а часть выходов соединена с входами аналоговой части 11, гальванически развязывающей и усиливающей сигналы с микропроцессора 10. Выходы аналоговой части 11, которые одновременно являются выходами системы 3 управления, подключены к силовой мостовой схеме 2 включения электродвигателя 1. Силовая мостовая схема 2 включения электродвигателя 1 выполнена предпочтительно в виде мостовой транзисторной схемы, подключенной к источнику 12 питания. В качестве датчика 5 тока использован трансформатор тока, первичная обмотка 13 которого включена в цепь прерывистого тока электродвигателя 1 между силовой мостовой схемой 2 и источником 12 питания, а вторичная обмотка 14, к выводам которой подключен конденсатор 15, через выпрямитель 16, интегрирующую цепь и делитель подключена к системе 3 управления. В конкретном случае исполнения вторичная обмотка 14 трансформатора через выпрямитель 16 и интегрирующую цепь, состоящую из конденсатора 17 и резистора 18, подключена к входу микропроцессора 10 системы 3 управления, через выпрямитель 16 и делитель, состоящий из резисторов 19 и 20, подключена к входу аналоговой части 11 системы 3 управления. Кроме того, вторичная обмотка 14 трансформатора подключена к питанию микропроцессора 10 через выпрямитель 16 и схему, содержащую резистор 21 и диод 22, цепь соединения которых подключена к логическому входу микропроцессора 10. Силовая мостовая схема 2 включения электродвигателя 1 соединена с источником питания 12 преимущественно через электронное реле 23, которое подключено к выходу микропроцессора 10. Реле 23 установлено в цепи питания между датчиком 5 тока и источником питания 12.
Сигналы о величине крутящего момента, прилагаемого водителем к рулевому колесу и определяемого датчиком 6, а также о скорости транспортного средства, определяемой датчиком 7, подают на различные входы системы 3 управления. В частном случае на другие входы системы 3 управления подают сигналы датчика 8 положения колес и датчика 9 оборотов двигателя. В состав системы 3 управления включают микропроцессор 10, на входы которого подают сигналы с датчиков 6 - 9, и аналоговую часть 11, с выходов которой снимают управляющий сигнал. В соответствии с сигналами датчиков 6 - 9 управляют работой реверсивного электродвигателя 1, добавляющего крутящий момент на рулевой вал. Электродвигателем 1 управляют посредством силовой мостовой схемы 2, преимущественно мостовой транзисторной схемы, на управляющие выводы которой поступают сигналы с выходов системы 3 управления, которые одновременно являются выходами аналоговой части 11. Через силовую мостовую схему 2 электродвигатель 1 подключают к источнику 12 питания, причем сигнал о величине тока в якоре электродвигателя 1 определяют датчиком 5 тока и через замкнутый контур 4 подают на вход системы 3 управления. В качестве датчика 5 тока используют трансформатор тока, первичную обмотку 13 которого включают в цепь прерывистого тока между силовой мостовой схемой 2 и источником 12 питания, а со вторичной обмотки 14 снимают сигнал о величине тока. При этом изменение тока через первичную обмотку 13 равно изменению намагничивающего тока, который, в свою очередь, пропорционален площади импульса во вторичной обмотке 14. За счет емкости конденсатора 15 на выводах вторичной обмотки 14 трансформатора тока получают высоковольтный синусоидальный импульс напряжения, время которого постоянно и меньше минимальной паузы управления. Амплитудное значение напряжения пропорционально амплитуде тока в первичной обмотке 13, по величине равного току якоря электродвигателя 1.
Сигнал со вторичной обмотки 14 трансформатора подают через выпрямитель 16 и интегрирующую цепь 17, 18 на вход микропроцессора 10 системы 3 управления и при постоянной частоте управления получают напряжение обратной связи, пропорциональное току якоря. Этот же сигнал через выпрямитель 16 и делитель 19, 20 подают на вход аналоговой части 11 системы 3 управления. При протекании тока перегрузки по якорю электродвигателя 1 импульс напряжения блокирует управляющий сигнал на выходе аналоговой части 11 системы 3 управления. Сигнал со вторичной обмотки 14 трансформатора подают также на питание микропроцессора 10 через выпрямитель 16 и схему, содержащую резистор 21 и диод 22, отсекающую импульс до напряжения питания микропроцессора 10, цепь соединения которых подключают к логическому входу микропроцессора 10. Таким образом, на логический вход микропроцессора 10 поступает прямоугольный логический сигнал. В момент коммутации силовой мостовой схемы 2 при отсутствии логического сигнала на входе микропроцессора 10 определяют наличие сквозного тока и с выхода микропроцессора 10 подают сигнал на отключение питания электродвигателя 1, которое, как правило, осуществляют через реле 23.
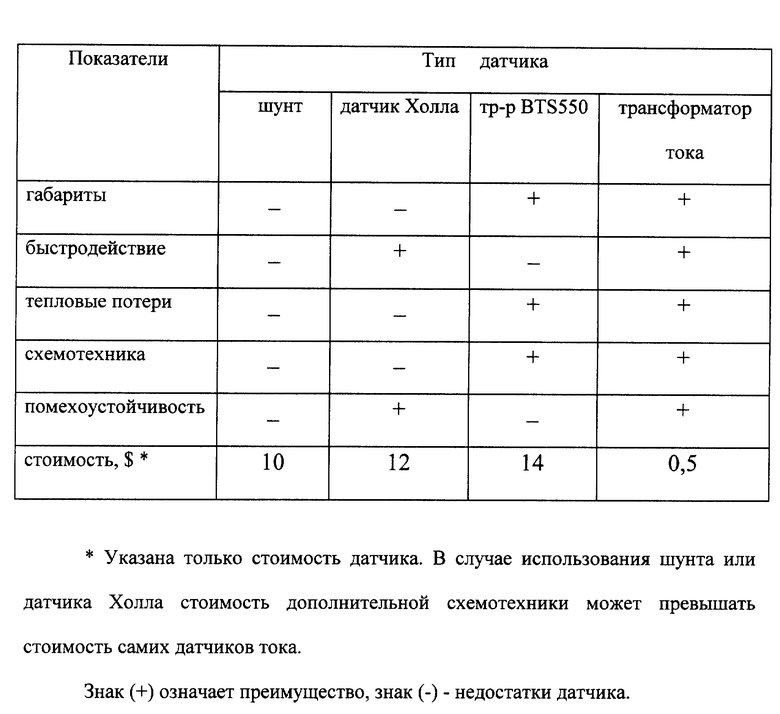
Использование в качестве датчиков тока шунта или датчика на эффекте Холла влечет за собой целый ряд проблем. Так, например, для конструкций, использующих шунт, характерны следующие недостатки:
1. Большие габариты, уменьшение которых ведет к повышению тепловых потерь.
2. Большая чувствительность к помехам, в связи с чем необходимо вводить фильтры, ухудшающие быстродействие защиты от токовой перегрузки.
3. Усложненная схемотехника, поскольку сигнал с шунта необходимо пропустить через усилитель с большим коэффициентом, который, как правило, требует двухполярного питания.
У датчика Холла есть значительное преимущество перед шунтом - высокая помехозащищенность, что улучшает быстродействие защиты по токовой перегрузке. В то же время у схем с датчиком Холла также имеются недостатки:
1. Большие габариты, при этом уменьшение размеров за счет уменьшения номинального тока датчика и использования его при пиковых нагрузках ведет к повышению тепловых потерь.
2. Требуется стабильное двухполярное питание.
Кроме того, и шунт и датчик Холла имеют достаточно высокую стоимость в отличие от используемого в изобретении в качестве датчика трансформатора тока.
Известны мостовые схемы, где применяется по два транзистора с дополнительным выходом для измерения тока. Так, американская фирма "International Rectifier" предлагает транзисторы типа IRCP054, где внутри транзистора встроен шунт. При малых габаритах транзистора увеличиваются его статические потери. Все недостатки шунта сохраняются и для этого транзистора. Германская фирма "Siemens" выпускает транзисторы типа BTS550, у которых на выходе имеется источник тока, по величине соответствующего силовому току. Основным недостатком его является работа на низких частотах, что соответствует медленному запиранию обратных диодов и низкому быстродействию. Стоимость одного транзистора даже при оптовых поставках достаточно велика.
Преимущества и недостатки использования того или иного типа датчика в электрическом блоке усилителя рулевого управления приведены в таблице.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ЭЛЕКТРОМЕХАНИЧЕСКОГО УСИЛИТЕЛЯ РУЛЕВОГО УПРАВЛЕНИЯ | 1999 |
|
RU2160204C2 |
| ТИРИСТОРНЫЙ СТАБИЛИЗАТОР ТОКА | 2003 |
|
RU2259627C2 |
| ЭЛЕКТРОПРИВОД УСИЛИТЕЛЯ РУЛЕВОГО УПРАВЛЕНИЯ | 2000 |
|
RU2192984C2 |
| ВЕНТИЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2227362C2 |
| КОНВЕРТОР НАПРЯЖЕНИЯ | 2020 |
|
RU2747776C1 |
| СТАБИЛИЗИРОВАННЫЙ ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ С ЗАЩИТОЙ | 2010 |
|
RU2469375C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2008 |
|
RU2375810C1 |
| ОСВЕТИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ЭНДОСКОПИЧЕСКОЙ ТЕХНИКИ | 1994 |
|
RU2082309C1 |
| КОРРЕКТОР КОЭФФИЦИЕНТА МОЩНОСТИ | 2014 |
|
RU2560103C1 |
| УСТРОЙСТВО ДЛЯ УСКОРЕННОГО ЗАРЯДА АККУМУЛЯТОРНОЙ БАТАРЕИ АСИММЕТРИЧНЫМ ТОКОМ | 1996 |
|
RU2134476C1 |
Изобретение относится к электрическим системам усилителя рулевого управления автомобиля. В соответствии с сигналами датчиков крутящего момента на рулевом валу и скорости транспортного средства управляют работой реверсивного электродвигателя. При этом сигналы датчиков подают на входы системы управления, а с выходов снимают управляющий сигнал, который подают на силовую мостовую схему включения электродвигателя. Сигнал о величине тока в якоре определяют датчиком тока, в качестве которого используют трансформатор тока. Первичную обмотку последнего включают в цепь прерывистого тока между силовой мостовой схемой и источником питания. В состав системы управления включают микропроцессор, на который подают сигналы датчиков, и аналоговую часть, с выходов которой снимают управляющий сигнал. Сигнал о величине тока со вторичной обмотки трансформатора тока подают через выпрямитель и интегрирующую цепь на вход микропроцессора системы управления, а через выпрямитель и делитель - на вход ее аналоговой части. Предложенный электрический блок характеризуется повышенной эксплуатационной надежностью. 2 с. и 10 з.п.ф-лы, 1 табл., 1 ил.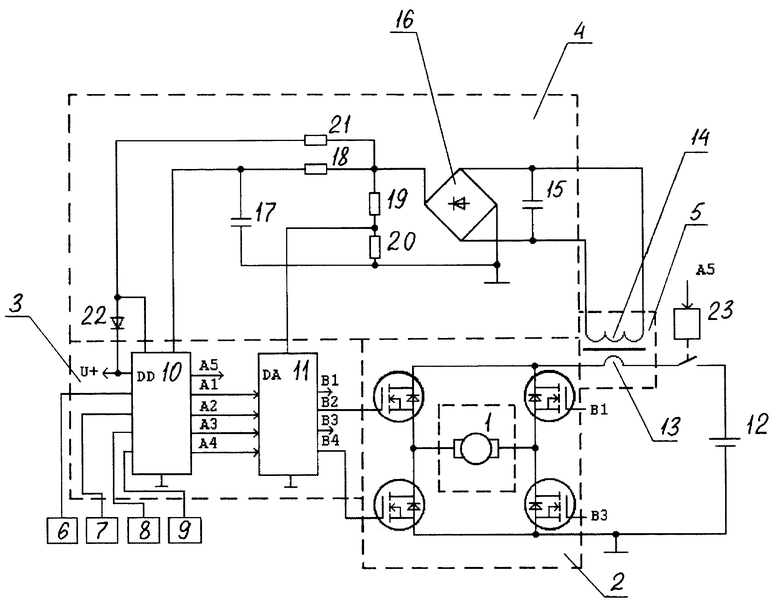
| НОВЫЙ СПОСОБ ПОЛУЧЕНИЯ N-АЦЕТИЛ-(L)-4-ЦИАНОФЕНИЛАЛАНИНА АС-(L)-PHE(4-CN)-OH И N-АЦЕТИЛ-(L)-N-АМИДИНОФЕНИЛАЛАНИН-ЦИКЛОГЕКСИЛ-ГЛИЦИН-β-(3-N-МЕТИЛПИРИДИН ИЯ)-АЛАНИНА АС-(L)-PАPH-СHG-РAL МE(3)-NH | 1996 |
|
RU2170764C2 |
| Стабилизированный источник питания | 1979 |
|
SU851375A1 |
| Импульсный стабилизатор напряжения | 1973 |
|
SU486307A1 |
| EP 0361726 A1, 04.04.1990. | |||

