Настоящее изобретение относится к передающему/приемному устройству и способу с функцией разнесения, и в частности, к устройству и способу для передачи/приема данных с функцией коммутируемого по времени разнесения передачи (КВРП).
Уровень техники
Характеристика передачи/приема данных может быть в общем улучшена с помощью способа разнесения в системе подвижной связи в условиях затухания. Фиг. 1 - это вид, иллюстрирующий способ разнесения, применимый к прямым и обратным линиям связи в системе подвижной связи.
Ссылаясь на фиг. 1, данные могут быть переданы по обратной линии связи с разнесением приемника. Чтобы осуществить это, базовая станция оборудована множеством приемных антенн. Для прямой линии связи имеется три способа разнесения: разнесение передачи, разнесение приемника и смешанное разнесение. В разнесении передачи базовая станция передает сигнал через множество передающих антенн, а подвижная станция принимает сигнал через одну приемную антенну с эффектом, который мог бы быть получен с множеством приемных антенн. Разнесение приемника обеспечивается, если подвижная станция имеет множество приемных антенн, а смешанная форма способа разнесения передачи и приема называется смешанным разнесением.
Однако способ разнесения приема на прямой линии связи имеет проблему, заключающуюся в том, что результат разнесения мал из-за того, что малый размер терминала ограничивает расстояние между приемными антеннами. Другая проблема состоит в том, что использование множества приемных антенн требует обеспечения отдельной конфигурации оборудования для приема сигнала прямо от линии связи и передачи сигнала обратной линии связи через соответствующую антенну, таким образом создавая сложности с размером и стоимостью терминала. Ввиду этих проблем система подвижной связи обычно применяет способ разнесения передачи на прямой линии связи.
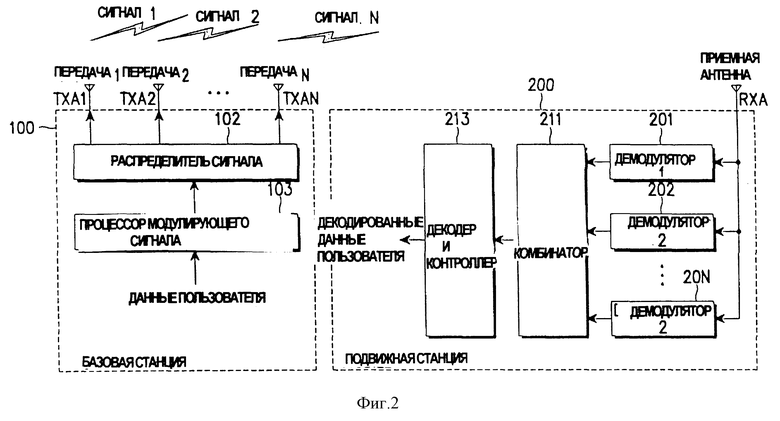
Для разнесения передачи на прямой линии связи базовая станция и подвижная станция в системе подвижной связи имеют передающий и приемный механизмы, как показано на фиг. 2. На фиг. 2 процессор 103 сигнала полосы частот модулирующего сигнала базовой станции 100 преобразует данные пользователя для передачи по прямой линии связи в сигнал полосы частот модулирующего сигнала. Процесс в процессоре 103 сигнала полосы частот модулирующего сигнала включает кодирование канала, перемежение (интерливинг), ортогональную модуляцию и ПШ (псевдошумовое) расширение. Распределитель сигнала 102 распределяет сигнал, принятый от процессора модулирующего сигнала 103, к N передающим антеннам от TXA1 до TXAN. Таким образом, передающий конец базовой станции 100 выполняет разнесение передачи через N антенн.
Передвижная станция 200 имеет одну приемную антенну RXA для приема сигналов от базовой станции 100 через N передающих антенн. Чтобы обработать принятые сигналы, подвижная станция 200 включает N демодуляторов от 201 до 20N, соответствующих N передающим антеннам. Комбинатор 211 комбинирует демодулированные сигналы, принятые от демодуляторов 201-20N, а декодер и контроллер 213 декодирует сигнал, принятый от комбинатора 211, чтобы получить декодированные данные пользователя.
На фиг. 2 данные пользователя, предназначенные для передачи от базовой станции 100 к подвижной станции 200, закодированы в процессоре 103 модулирующего сигнала и разделены на N потоков в распределителе сигнала 102, и переданы через соответствующие передающие антенны от TXA1 до TXAN. Затем подвижная станция 200 демодулирует сигналы, принятые через единственную приемную антенну RXA в N демодуляторах от 201 до 20N, число которых равно числу передающих антенн от TXA1 до TXAN, и комбинирует демодулированные сигналы, получая таким образом усилие разнесения.
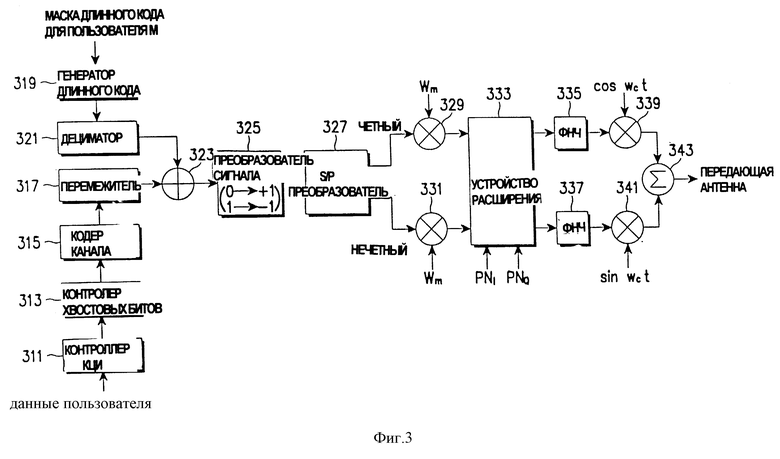
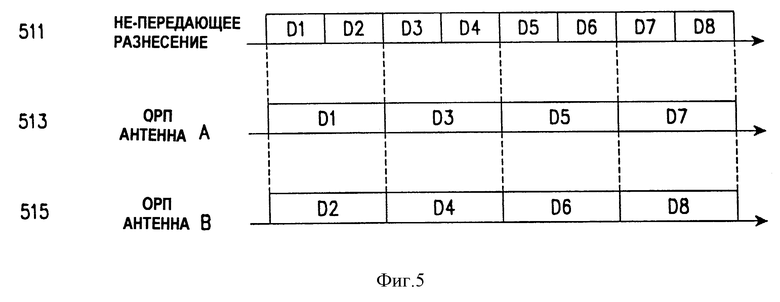
Теперь будет описана структура передатчика в системе связи МДКР (многостанционный доступ с кодовым разделением каналов) с непередающим разнесение (НПР). Ссылаясь на фиг. 3, НПР в базовой станции включает генератор КЦИ (контроля с помощью циклического избыточного кода) 311 для добавления битов КЦИ к входным данным пользователя, чтобы определять ошибки кадра, которые возникают во время передачи данных пользователя. Генератор 313 хвостовых битов добавляет хвостовые биты, показывающие прекращение кадра данных, к кадру данных перед кодированием канала. Затем кодер канала 315 кодирует кадр данных для коррекции ошибок, и перемежитель 317 перемежает шифрованные данные. Комбинатор 323 осуществляет операцию исключающее ИЛИ перемеженных данных с длинной кодовой последовательностью. Эта длинная кодовая последовательность генерируется в генераторе длинного кода 319 и децимируется в дециматоре 321 с той же скоростью, как скорость выходного сигнала терминала перемежителя 317. Преобразователь сигнала 325 преобразует 0 и 1 кодированных данных, полученных от комбинатора 323, в +1 и -1 соответственно для ортогональной модуляции. Преобразователь последовательного кода в параллельный (S/P) 327 разделяет сигнал, принятый от преобразователя сигнала 325 на потоки канала 1 и канала Q, для КФМ (квадратурной фазовой манипуляции) модуляции. Потоки канала 1 и канала Q подвергаются ортогональной модуляции в умножителях 329 и 331 и ПШ расширению в ПШ расширителе 333. Расширенный сигнал фильтруется для получения импульсной формы в ФНЧ (фильтрах нижних частот) 335 и 337, накладывается на несущую, и, наконец, передается через передающую антенну. Вышеописанная структура может быть применена к генератору сигнала канала. Кроме того, должно быть понято, что генератор сигнала канала может быть выполнен различным образом согласно способу МДКР. Сигнал передачи, выходящий из НПР передатчика в базовой станции, показанного на фиг. 3, имеет структуру, показанную в 511 на фиг. 5. Фиг. 5 показывает временные характеристики данных пользователя, выходящих из НПР передатчика и из передатчика ортогонального разнесения передачи (ОРП) с двумя антеннами (N = 2). ОРП передатчик эксплуатируется, как показано на фиг. 4, чтобы улучшить характеристику прямой линии связи в НПР МДКР системе подвижной связи. В ОРП передатчике информация для одного пользователя разветвляется на два или более потоков и передается через разные передающие антенны, как показано с помощью 513 и 515.
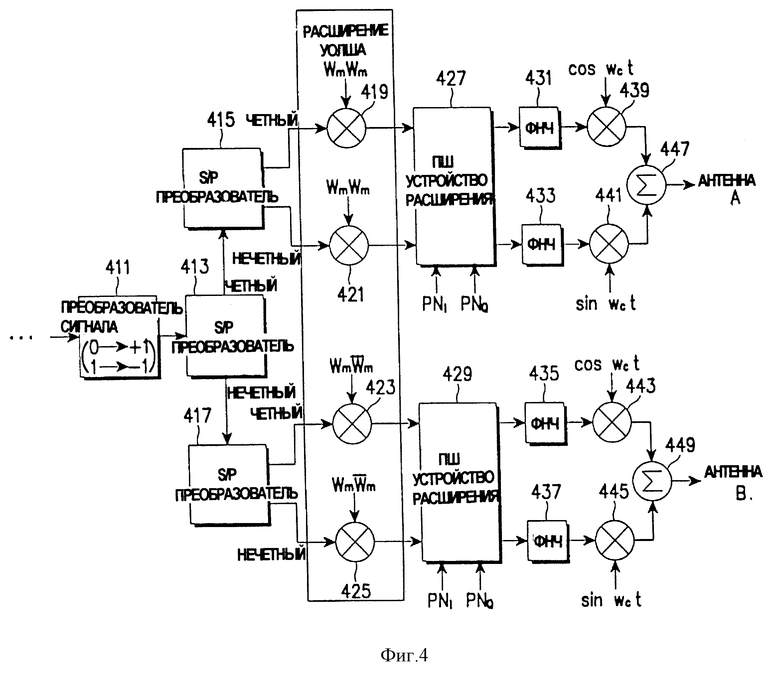
Фиг. 4 есть блок-схема ОРП передатчика с двумя передающими антеннами (N = 2), например, для базовой станции в системе подвижной связи. Последующее описание осуществляется с пониманием того, что [Wm-Wm] идентично 
Ссылаясь на фиг. 4, ОРП передатчик работает таким же образом, как НПР передатчик с фиг. 3, за исключением процесса преобразования последовательного кода в параллельный. В структуре ОРП преобразованные данные разветвляются на N потоков по числу передающих антенн, в S/P преобразователях 413, 415 и 417, и ортогонально модулируются в умножителях 419, 421, 423 и 425, для поддержания взаимной ортогональности между передающими антеннами.
Кроме ортогональной модуляции, ортогональные коды должны быть расширены, чтобы гарантировать взаимную ортогональность между антеннами. Расширение ортогонального кода выполняется путем расширения матрицы Адамара. В случае ОРП передатчика с двумя передающими антеннами А и В, показанного на фиг. 4, различные ортогональные коды, назначенные антеннам, есть [WmWm] и [Wm-Wm], расширенные из ортогонального кода Wm с длиной 2m, используемого в НПР передатчике. Целью расширения ортогонального кода является выравнивание скорости данных каждого из N потоков, которая равна 1/N скорости данных до преобразования из последовательного кода в параллельный.
Приемник для приема сигнала от такого ОРП передатчика требует демодуляторов сигнала для демодуляции данных пользователя, демодулятора пилот-сигнала для обеспечения информации синхронизации и фазовой информации, необходимых в демодуляторах сигнала, и преобразователя параллельного кода в последовательный (P/S) для преобразования М выходных сигналов демодулятора в поток последовательного сигнала.
Канал пилот-сигнала используется для базовой станции, чтобы обеспечить информацией синхронизации и фазовой информацией подвижную станцию. Подвижная станция сначала активирует демодулятор пилот-сигнала, чтобы получить необходимую информацию, и демодулирует данные пользователя на основании полученной информации. Каждой передающей антенне должен быть назначен канал пилот-сигнала.
В приемнике, соответствующем обычному ОРП передатчику с фиг. 4, демодулятор пилот-сигнала подвергает принятый сигнал ПШ сужению и ортогональной демодуляции, и интегрирует результирующий сигнал для одного цикла с целью демодулирования канала пилот-сигнала из принятого сигнала. Устройство вычисления времени и устройство вычисления фазы в демодуляторе пилот-сигнала вычисляют значения времени и фазы из интегрированного значения.
Демодулятор сигнала приемника выполняет ПШ сжатие на сигнале данных пользователя на основании информации синхронизации, полученной от демодулятора пилот-сигнала. Фазовая ошибка, которая возникает во время передачи, компенсируется путем умножения фазовой информации на интегрированную величину, полученную из интегрирования ортогонально модулированного сигнала в течение одного цикла. Выходной сигнал фазо-компенсированного интегратора преобразуется в величину вероятности с помощью программного решающего блока и подается через P/S преобразователь в обращенный перемежитель.
Несмотря на усовершенствование характеристики приема по сравнению с системой НПР, обычная ОПР система подвижной связи, однако, имеет следующие проблемы.
Прежде всего, терминал должен быть оборудован демодуляторами пилот-сигнала и демодуляторами сигнала, каждыми в количестве, равном количеству передающих антенн базовой станции. Это увеличивает сложность, стоимость и потребление энергии приемника.
Другая проблема состоит в том, что длина используемого ортогонального кода увеличивается в N раз от длины кода в случае НПР, для N передающих антенн. Поэтому интервал интеграции расширяется, ухудшая характеристику приема в условиях восприимчивого к сбоям частотного канала.
Кроме того, количество доступных передающих антенн ограничено значением 2n. Другими словами, количество передающих антенн есть степень 2, возрастающая в порядке 2, 4, 8, 16, ... , что создает ограничение на некоторых применениях, включая антенную решетку.
Сущность изобретения
Задачей настоящего изобретения является создание КВРП (коммутируемого по времени разнесения передачи) устройства, в котором сигнал передачи базовой станции распределен к множеству антенн путем коммутации по времени.
Другой задачей настоящего изобретения является создание приемника для приема сигналов от КВРП передатчика.
Дополнительной задачей настоящего изобретения является создание КВРП устройства связи и способа в системе подвижной связи, в которых длина ортогонального кода не изменяется.
Еще одной задачей настоящего изобретения является создание приемника и способа приема в КВРП системе подвижной связи, в которых предлагается единственный демодулятор сигнала, независимо от количества передающих антенн.
Еще одной задачей настоящего изобретения является создание передатчика и способа передачи в КВРП системе подвижной связи, в которых количество передающих антенн может быть легко увеличено.
Согласно одному аспекту настоящего изобретения вышеупомянутые задачи решаются путем создания передающего устройства с разнесением по времени в базовой станции системы подвижной связи. Это передающее устройство имеет множество передающих антенн, РЧ (радиочастотных) передатчиков в количестве, равном количеству передающих антенн и присоединенных к их соответствующим передающим антеннам, для выдачи сигналов на прямую линию связи, контроллер для генерации сигнала управления коммутацией в неперекрываемом временном цикле, ортогональный модулятор для модуляции сигнала передачи ортогональным кодом, устройство расширения для расширения выходного сигнала ортогонального модулятора, и коммутатор, присоединенный к выходным терминалам устройства расширения для присоединения выхода устройства расширения к соответствующему передатчику на основании сигнала управления коммутацией.
Согласно другому аспекту настоящего изобретения создано примерное устройство в подвижной станции системы подвижной связи. Это приемное устройство имеет приемник канала пилот-сигнала для детектирования сигнала канала пилот-сигнала из выходного сигнала прямой линии связи и генерации вычисленных значений фазы и времени, контроллер для генерации сигнала управления выбором на основе информации цикла и информации шаблона коммутации, при синхронизации опорного времени с базовой станцией, селектор для избирательной выдачи вычисленных значений фазы и времени, принятых от канала пилот-сигнала приемника на основании сигнала управления выбором, и приемник канала трафика для детектирования сигнала канала трафика в выбранный вычисленный момент времени и корректировки фазовой ошибки детектированного сигнала канала трафика на основании вычисленного значения фазы, для декодирования сигнала.
Краткое описание чертежей
Вышеупомянутые задачи и преимущества настоящего изобретения станут более понятны путем подробного описания его предпочтительных примеров осуществления со ссылкой на сопровождающие чертежи, на которых:
фиг. 1 есть вид, показывающий способ разнесения в прямой и обратной линиях связи в системе подвижной связи;
фиг. 2 есть блок-схема устройства передачи на основе разнесения в прямой линии связи в системе подвижной связи;
фиг. 3 есть блок-схема НПР передатчика в системе подвижной связи;
фиг. 4 есть блок-схема обычного ОРП передатчика в системе подвижной связи;
фиг. 5 иллюстрирует структуру данных, передаваемых из передатчиков, показанных на фиг. 3 и 4;
фиг. 6 есть блок-схема КВРП передатчика в системе подвижной связи согласно примеру осуществления настоящего изобретения;
фиг. 7 есть блок-схема контроллера, показанного на фиг. 6;
фиг. 8 есть вид, иллюстрирующий временные характеристики данных, передаваемых в периодическом шаблоне от КВРП передатчика с фиг. 6;
фиг. 9 есть вид, иллюстрирующий характеристики данных, передаваемых в произвольном шаблоне от КВРП передатчика с фиг. 6;
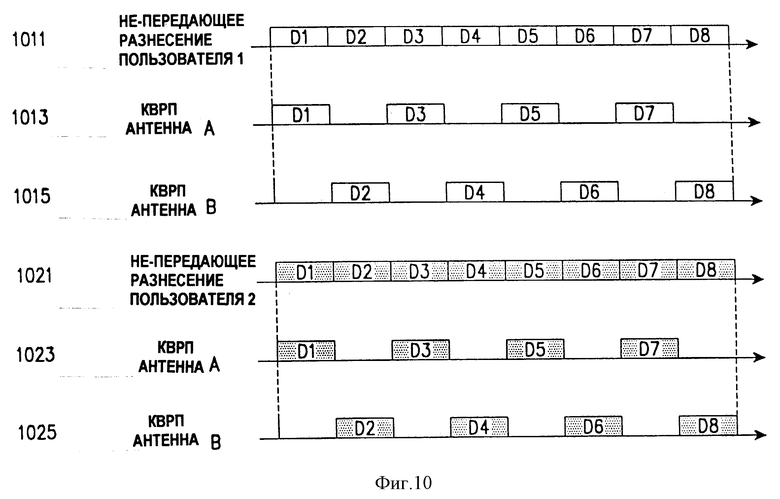
фиг. 10 есть вид, иллюстрирующий временные характеристики данных для многих пользователей, синхронно передаваемых в произвольном шаблоне от КВРП передатчика с фиг. 6;
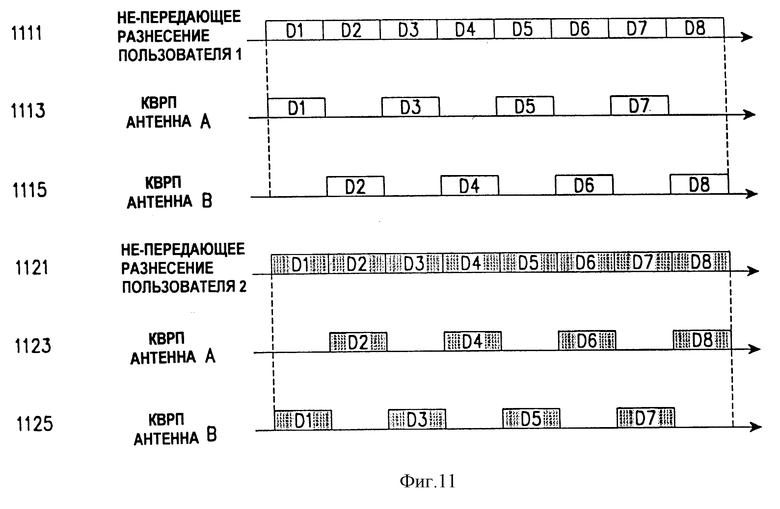
фиг. 11 есть вид, иллюстрирующий временные характеристики данных для многих пользователей, асинхронно передаваемых в произвольном шаблоне от КВРП передатчика с фиг. 6;
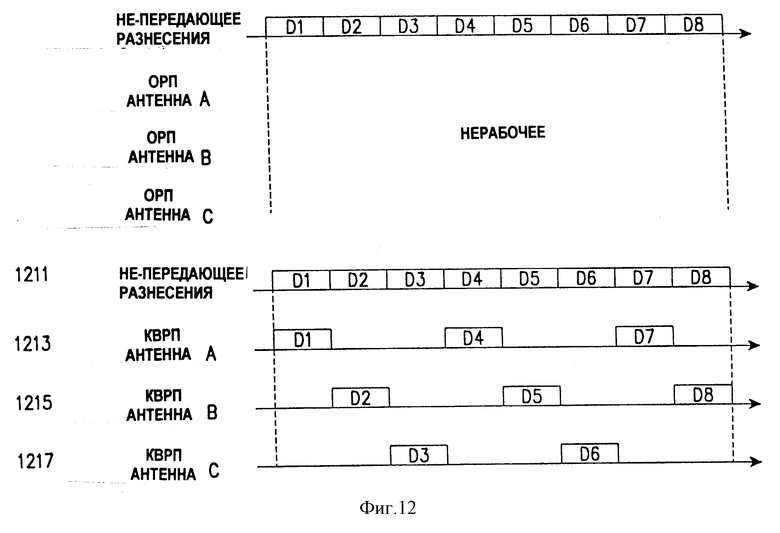
фиг. 12 есть вид, на который делается ссылка для описания возможности увеличения количества передающих антенн в КВРП передатчике системы подвижной связи согласно примеру осуществления настоящего изобретения;
фиг. 13 есть блок-схема примера осуществления приемного устройства для приема данных от КВРП устройства передачи в системе подвижной связи согласно настоящему изобретению; и
фиг. 14 есть блок-схема другого примера осуществления приемного устройства для приема данных от КВРП устройства передачи в системе подвижной связи согласно настоящему изобретению.
Подробное описание предпочтительных примеров осуществления
Система подвижной связи согласно примеру осуществления настоящего изобретения распределяет данные пользователя к множеству антенн путем коммутации по времени на передающей стороне для достижения разнесения передачи, и демодулирует сигнал на основе разнесения по времени в единственном модуляторе сигнала на приемном конце. Особенности временного разнесения согласно настоящему изобретению заключаются в следующем:
(1) Демодулятор сигнала дан для демодулирования данных пользователя независимо от количества N передающих антенн. То есть, только один ортогональный код доступен пользователю, что позволяет упрощение приемника и обеспечивает низкую мощность рассеяния и низкую стоимость терминала;
Длина ортогонального кода такая же, как длина ортогонального кода, используемого в НПР устройстве, независимо от количества N передающих антенн. Это приводит к тому, что не происходит увеличения интервала интегрирования, который участвует в обеспечении разнесения по времени, и
(3) Количество доступных передающих антенн не ограничено величиной 2n, а может расширяться неограниченно, таким образом не налагая ограничений на другие применения.
Прежде чем дать описание структуры и работы передатчика в базовой станции и приемнике в оконечной станции согласно примеру осуществления настоящего изобретения, следует отметить, что схема КВРП выполнения разнесения по времени на передающие антенны путем коммутации по времени применена к прямой линии связи в системе подвижной связи настоящего изобретения.
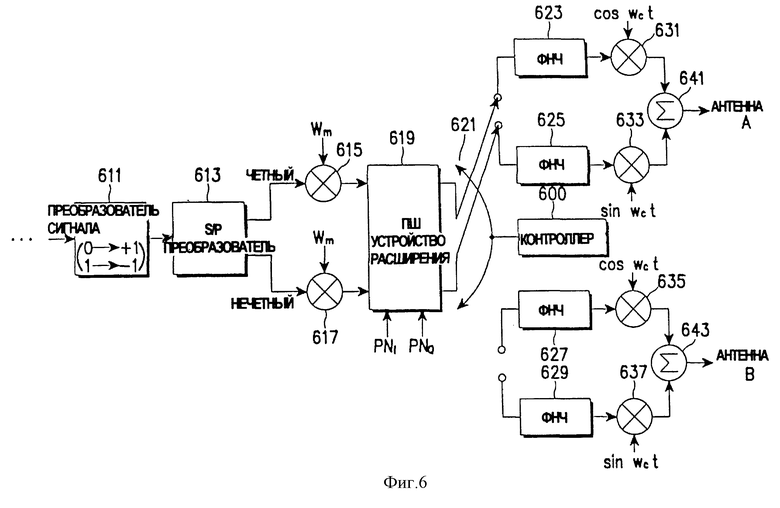
Фиг. 6 есть блок-схема КВРП передатчика с двумя (N = 2) передающими антеннами в базовой станции согласно примеру осуществления настоящего изобретения.
Ссылаясь на фиг. 6, преобразователь сигнала 611 принимает сигнал, получающийся из комбинации кодированных данных пользователя с длинным кодом, и изменяет уровень принятого сигнала путем преобразования 0 и 1 в +1 и -1 соответственно. S/P преобразователь 613 преобразует последовательный сигнал, принятый от преобразователя сигнала 611 в нечетно-нумерованный сигнал и четно-нумерованный сигнал. Умножитель 615 умножает четно-нумерованный сигнал на ортогональный код Wm, а умножитель 617 умножает нечетно-нумерованный сигнал на ортогональный код Wm. Эти умножители 615 и 617 функционируют, чтобы подвергнуть сигнал пользователя ортогональной модуляции (или ортогональному расширению) путем умножения. Ортогональный код может быть кодом Уолша. ПШ устройство расширения 619 умножает ортогонально модулированные сигналы, принятые от умножителей 615 и 617 на соответствующие ПШ последовательность ПШI и ПШQ для ПШ расширения (или ПШ маскирования) сигнала, подлежащего передаче.
Контроллер 600 генерирует сигнал управления коммутацией для распределения сигнала передачи к множеству антенн в КВРП передатчике настоящего изобретения. Контроллер 600 синхронизирует к GPS (глобальной системе позиционирования) сигнал в синхронном режиме, и цикл коммутации является целым кратным длине ортогонального кода. Дополнительно, для контроллера 600 должна быть создана просмотровая таблица для хранения коммутирующей информации относительно шаблона переключения в случае выполнения коммутации по времени в конкретном шаблоне. Контроллер 600 конфигурирован на фиг. 7, и описание его работы будет дано позднее. Коммутатор 621 осуществляет коммутацию на основании выходного сигнала контроллера 600, и он имеет общий терминал, присоединенный к выходным терминалам ПШ устройства расширения 619, от которого передаются сигналы расширения канала I и канала Q, при этом первый выход присоединен к ФНЧ 623 и 625, а второй выход присоединен к ФНЧ 627 и 629. Коммутатор 621 осуществляет коммутацию на основании сигнала управления коммутацией, полученного от контроллера 600, и избирательно выдает сигналы расширения, полученные от ПШ устройства расширения 619, к ФНЧ 623 и 625 или к ФНЧ 627 и 629.
ФНЧ 623 и 625, фильтр низких частот канала I и канала Q ПШ осуществляют расширение сигналов, полученных от коммутатора 621. Умножители 631 и 633 умножают выходные сигналы ФНЧ 623 и 625 на несущие, для частотного преобразования с повышением частоты. Сумматор 641 суммирует сигналы, полученные от умножителей 631 и 633, и посылает результирующий сигнал к передающей антенне A.
ФНЧ 627 и 629, фильтр низких частот канала I и канала Q ПШ осуществляют расширение сигналов, полученных от коммутатора 621. Умножители 635 и 637 умножают выходные сигналы ФНЧ 627 и 629 на несущие, для частотного преобразования с повышением частоты. Сумматор 643 суммирует сигналы, полученные от умножителей 635 и 637, и посылает результирующий сигнал к передающей антенне B.
Структура, показанная на фиг. 6, может быть адаптирована в качестве передатчика прямого канала в КВРП базовой станции. Передатчики прямого канала включают передатчик канала пилот-сигнала, передатчик канала синхронизации, передатчик канала управления и передатчик канала трафика. Полагая, что канал пилот-сигнала обеспечивает синхронизацию по времени для передачи данных на прямой линии связи, передатчик канала пилот-сигнала может быть конфигурирован так, чтобы иметь ОРП структуру, в то время как передатчики других каналов могут использовать КВРП структуру, показанную на фиг. 6.
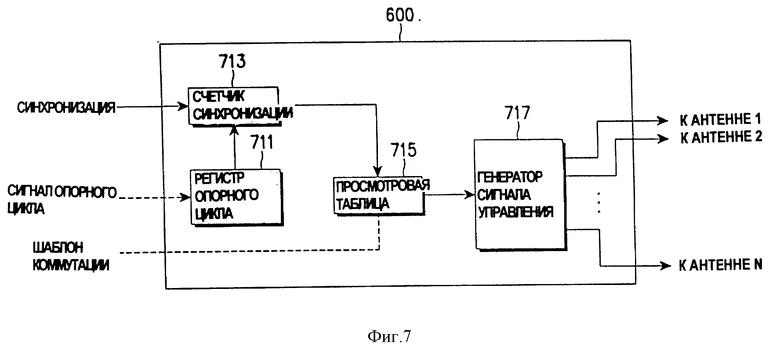
Фиг. 7 есть блок-схема контроллера 600, показанного на фиг. 6. Ссылаясь на фиг. 7 регистр опорного цикла 711 записывает сигнал опорного цикла, полученный от процессора высшего уровня. Сигнал опорного цикла действует как цикл коммутации по времени в передатчике канала. Счетчик синхронизации 715 принимает импульсы синхронизации от системы базовой станции, подсчитывает эти импульсы синхронизации в блоке опорного цикла, и генерирует считанные импульсы. Просмотровая таблица 715 хранит информацию шаблона коммутации, полученную от процессора верхнего уровня, и выдает соответствующую информацию коммутации в ответ на считанные импульсы, полученные от счетчика синхронизации 713. Генератор управляющего сигнала 717 генерирует сигнал управления коммутацией для распределения сигнала ПШ расширения к множеству передающих антенн согласно информации шаблона, считанной из просмотровой таблицы 715.
Для примера, контроллер 600 с фиг. 7 функционирует так, чтобы попеременно подключать выходной модулированный сигнал передачи к N антеннам на периоды времени в передатчике КВРП базовой станции. Регистр опорного цикла 711 хранит цикл коммутации по времени для канала так, чтобы каждый канал мог быть скоммутирован по времени по-разному. То есть, обозначение разного опорного сигнала цикла для каждого канала в регистре опорного цикла 711 приводит к передаче каждого канала в разном цикле коммутации. Величины, записанные в регистре опорного цикла 711, обозначены отдельно для каждого канала в процессоре высшего уровня до передачи канала, и могут быть изменены во время передачи данных под отдельно определенным управлением.
Импульсы синхронизации, входящие к счетчику синхронизации 713, подаются от системы базовой станции, синхронизированной с опорным временем в базовой станции, и имеют цикл синхронизации, пропорциональный длине ортогонального цикла. Счетчик синхронизации 713 подсчитывает импульсы синхронизации, сравнивает подсчитанную величину с величиной, записанной в регистре опорного цикла 711, и посылает считанные импульсы в просмотровую таблицу 715 в момент времени, когда эти величины равны.
Просмотровая таблица 715 представляет собой запоминающее устройство для хранения шаблона коммутации по времени данных, передаваемых через N передающих антенн. Каждому каналу может быть назначен разный шаблон коммутации, или каналы могут совместно использовать один и тот же шаблон коммутации. Шаблон коммутации, записанный в просмотровой таблице 715, должен быть передан от базовой станции к терминалу, чтобы позволить ему демодулировать данные на основе шаблона коммутации.
Генератор управляющего сигнала 717 анализирует шаблон коммутации, считанный из просмотровой таблицы 715, и управляет трактами сигнала к N передающим антеннам. То есть, разрешена только одна выбранная передающая антенна, а остальные передающие антенны заблокированы.
Итак, контроллер 600 подсчитывает импульсы синхронизации, сравнивает подсчитанную величину с опорным значением цикла и генерирует считанный сигнал, соответствующий шаблону коммутации, записанному в просмотровой таблице 715, если эти величины равны. Здесь шаблон коммутации есть информация, используемая для выбора передающей антенны в последующей операции. Полученная таким образом информация изменяется на сигнал разрешения/блокировки для каждого тракта передачи.
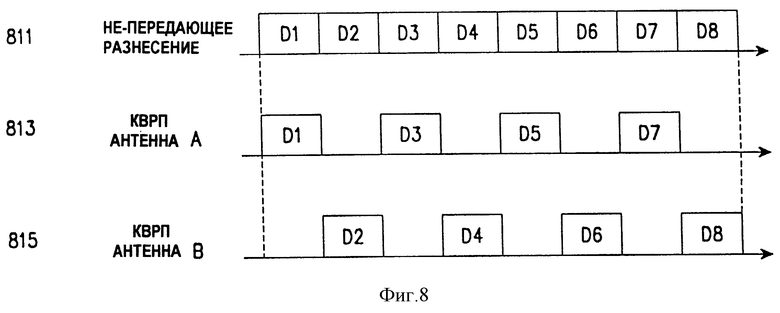
Фиг. 8 есть вид, иллюстрирующий сравнение между характеристиками сигналов, передаваемых от НПР передатчика и КВРП передатчика, показанного на фиг. 6. На фиг. 8 ссылочный номер 811 обозначает временную диаграмму выходного сигнала НПР передатчика. Ссылочные номера 813 и 815 обозначают временные диаграммы сигналов, соответственно передаваемых через передающие антенны A и B в КВРП передатчике.
Во время работы КВРП передатчик использует один ортогональный код, назначенный соответствующему пользователю, в отличие от ОРП передатчика, требующего столько ортогональных кодов, сколько имеется передающих антенн, и следует тому же процессу, как и НПР передатчик, вплоть до ПШ расширения. Затем ПШ расширенные данные коммутируются к каждой передающей антенне в цикле, равном целому кратному длине ортогонального кода, в периодическом шаблоне, показывающем последовательную передачу данных к N передающим антеннам, или в произвольном шаблоне. Какой шаблон коммутации использовать, определяется выходным сигналом просмотровой таблицы 715 в контроллере 600, и цикл коммутации по времени определяется величиной опорного цикла, записанной в регистре опорного цикла 711.
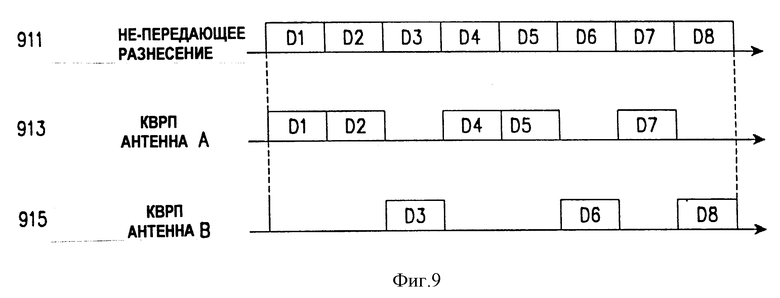
Схема коммутации по времени может принимать произвольный шаблон, как показано на фиг. 9, а также периодический шаблон, как показано на фиг. 8. То есть, если просмотровая таблица 715 загружена шаблоном коммутации, требующим, чтобы данные были присоединены к передающей антенне A последовательно дважды, а затем к передающей антенне B однажды в КВРП передатчике фиг. 6, контроллер 600 управляет коммутатором 621, чтобы присоединить выход ПШ устройства расширения 619 к ФНЧ 623 и 625 в течение двух циклов коммутации и к ФНЧ 627 и 629 в течение одного цикла коммутации. В результате, временные диаграммы сигналов, исходящих от передающих антенн A и B, показаны обозначениями 913 и 915 на фиг. 9, соответственно. Коммутация по времени в произвольном шаблоне может дополнительно предлагать эффект скремблирования данных.
Фиг. 10 есть временная диаграмма данных пользователя в условиях, когда N = 2, имеется два пользователя и осуществляется синхронная коммутация по времени в КВРП передатчике, а фиг. 11 есть временная диаграмма данных пользователя в условиях, когда N = 2, имеется два пользователя и осуществляется асинхронная коммутация по времени в КВРП передатчике. Синхронная коммутация по времени отличается от асинхронной коммутации по времени в зависимости от того, применяется ли идентичная схема коммутации по времени для всех терминалов базовой станции, или используются разные схемы коммутации по времени.
КВРП способ настоящего изобретения преодолевает обычные ограничения, с которыми встречается ОРП способ. Поскольку пользователю назначается один ортогональный код, приемник может демодулировать все сигналы данных пользователя в одном демодуляторе, независимо от количества передающих антенн. Более того, использование того же ортогонального кода, как код НПР передатчика, приводит к тому, что не происходит расширения интервала интегрирования. В то время как количество передающих антенн в ОРП передатчике ограничено величиной 2n, оно не ограничено (N есть целое число) в настоящем изобретении. Фиг. 12 есть временная диаграмма данных пользователя, передаваемых от КВРП передатчика и ОРП передатчика в сравнении, при N равном 3 и периодическом шаблоне. Как показано на чертеже, КВРП передатчик может поддерживать разнесение по времени с тремя передающими антеннами, что невозможно в ОРП передатчике.
Может быть два типа приемных устройств для терминала, соответствующего КВРП передающему устройству. В одном типе, ОРП применяется для канала пилот-сигнала, а КВРП - для остальных каналов. В другом типе КВРП применяется во всех каналах, включая канал пилот-сигнала и каналы данных пользователя. Фиг. 13 и 14 есть блок-схемы таких двух типов приемных устройств. Поскольку канал пилот-сигнала является общим каналом для обеспечения синхронной демодуляции в терминале, для передачи канала пилот-сигнала может быть предоставлен как ОРП, так и КВРП с заданным циклом и шаблоном.
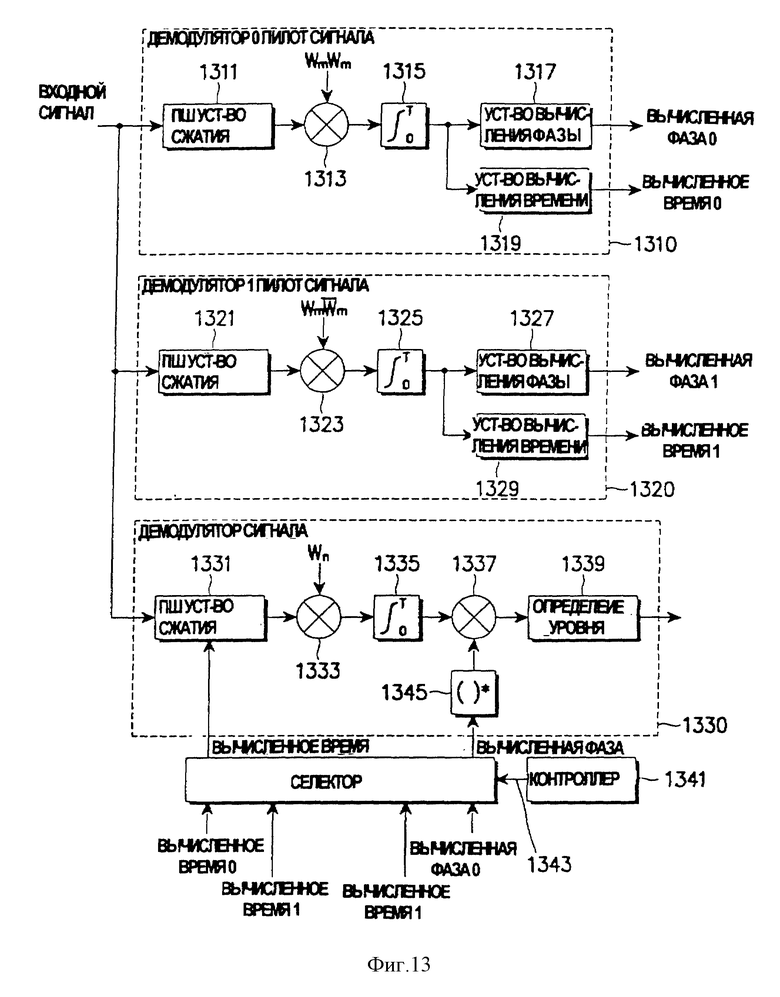
Фиг. 13 есть блок-схема приемного устройства для приема сигнала от передающего устройства, имеющего две передающие антенны, КВРП передатчик канала трафика и ОРП передатчик канала пилот-сигнала. Ссылаясь на фиг. 13, прием включает приемники канала пилот-сигнала в таком количестве, как количество передающих антенн передающего устройства. Приемники канала пилот-сигнала должны использовать ортогональные коды, расширенные по длине пропорционально количеству передающих антенн. На фиг. 13 обеспечены два приемника канала пилот-сигнала 1310 и 1320 благодаря двум передающим антеннам. Входной сигнал есть сигнал полосы частот модулирующего сигнала.
В приемнике канала пилот-сигнала 1310 ПШ устройство сжатия 1311 умножает входной сигнал на ПШ последовательность, для ПШ сжатия. Умножитель 1313 ортогонально демодулирует сигнал, принятый от ПШ устройства сжатия 1311 путем умножения принятого сигнала на тот же ортогональный код [WmWm], как и код, используемый в передатчике канала пилот-сигнала. Интегратор 1315 интегрирует сигнал, принятый от умножителя 1311 в течение времени Т и суммирует интегрированные величины. Устройство вычисления фазы 1317 анализирует сигнал, полученный от интегратора 1315 и выдает вычисленное значение фазы 0 пилот-сигнала, принятого через передающую антенну А. Устройство вычисления времени 1319 анализирует сигнал, полученный от интегратора 1315, и выдает вычисленное значение времени 0 как время передачи пилот-сигнала, полученного через передающую антенну A.
В приемнике канала пилот-сигнала 1320 ПШ устройство сжатия 1321 умножает входной сигнал на ПШ последовательность для ПШ сжатия. Умножитель 1323 ортогонально демодулирует сигнал, принятый от ПШ устройства сжатия 1321 путем умножения принятого сигнала на тот же ортогональный код  как и другой, используемый в передатчике канал пилот-сигнала. Интегратор 1325 интегрирует сигнал, принятый от умножителя 1321 в течение времени Т и суммирует интегрированные величины. Устройство вычисления фазы 1327 анализирует сигнал, полученный от интегратора 1325 и выдает вычисленное значение фазы 1 пилот-сигнала, принятого через передающую антенну В. Устройство вычисления времени 1329 анализирует сигнал, полученный от интегратора 1325, и выдает вычисленное значение времени 1 как время передачи пилот-сигнала, полученного через передающую антенну B.
как и другой, используемый в передатчике канал пилот-сигнала. Интегратор 1325 интегрирует сигнал, принятый от умножителя 1321 в течение времени Т и суммирует интегрированные величины. Устройство вычисления фазы 1327 анализирует сигнал, полученный от интегратора 1325 и выдает вычисленное значение фазы 1 пилот-сигнала, принятого через передающую антенну В. Устройство вычисления времени 1329 анализирует сигнал, полученный от интегратора 1325, и выдает вычисленное значение времени 1 как время передачи пилот-сигнала, полученного через передающую антенну B.
Контроллер 1341 осуществляет синхронизацию с опорным временем базовой станции и генерирует управляющий сигнал для выбора выходов приемников канала пилот-сигнала 1310 и 1320 в цикле коммутации по времени. Селектор 1343 избирательно выдает вычисленные значения фазы и времени, полученные от приемников канала пилот-сигнала 1310 и 1320 на основании управляющего сигнала контроллера 1341.
В приемнике канала трафика 1330 ПШ устройство сжатия 1331 умножает входной сигнал в момент времени передачи, показанный временным сигналом, полученным от селектора 1343, на ПШ последовательность. То есть, ПШ устройство сжатия 1331 сжимает входной сигнал с помощью ПШ кода в вычисленный момент времени коммутации. Умножитель 1333 умножает ортогональный код [Wn], используемый в передатчике канала трафика, на сигнал, полученный от ПШ устройства сжатия 1331. Интегратор 1335 интегрирует сигнал, полученный от умножителя 1333 в течение времени Т и суммирует интегрированные значения. Преобразователь знака фазы 1345 изменяет знак величины фазы, полученной от селектора 1343. Умножитель 1337 умножает выходной сигнал интегратора 1335 на выходной сигнал конвертора знака фазы 1345, чтобы синхронизировать фазу входного сигнала. Блок определения уровня 1339 детектирует уровень сигнала, полученного от умножителя 1337, и изменяет уровень сигнала до уровня серого. Сигнал, выходящий из блока определения уровня 1339, подается к декодеру в приемнике.
Приемное устройство, показанное на фиг. 13, включает демодуляторы канала пилот-сигнала в таком количестве, как количество N передающих антенн, в данном случае две антенны. Эти приемники канала пилот-сигнала такие же, как ОРП приемники, по конфигурации и в работе. С другой стороны, дан единственный приемник канала трафика 1330, поскольку модуляция данных пользователя, распределенных к передающим антеннам, использует идентичный ортогональный код.
Вычисленная информация времени и фазы для N передающих антенн избирательно подается от приемников канала пилот-сигнала 1310 и 1320 к приемнику канала трафика 1330 селектором 1343 на основании сигнала синхронизации контроллера 1341, синхронизированного с базовой станцией. То есть, терминал получает информацию цикла коммутации и шаблона от базовой станции во время установления вызова.
Контроллер 1341 получает текущую схему коммутации, приложенную к системе, путем демодуляции канала синхронизации на основании информации пилот-сигнала о времени и фазе, полученной из демодулированного канала пилот-сигнала и анализа информации, загруженной на демодулированный канал синхронизации. При детектировании схемы коммутации для КВРП в приемном устройстве терминал может быть синхронизирован с базовой станцией в смысле коммутации по времени.
Приемник канала трафика 1330 подвергает сигнал данных пользователя ПШ сжатию, используя вычисленное значение времени, избирательно полученное от селектора 1343, и ортогонально демодулирует ПШ расширенный сигнал. Затем он интегрирует сигнал ортогональной модуляции в течение одного цикла, и умножает интегрированное значение на величину, полученную от преобразования знака фазовой информации, выбранную селектором 1343, чтобы таким образом компенсировать фазовую ошибку, которая возникает во время передачи данных. Фазово-компенсированный выходной сигнал интегратора подвергается программируемому решению и преобразуется в величину вероятности в блоке определения уровня 1339 и подается через P/S преобразователь (не показан) к обращенному перемежителю (не показан).
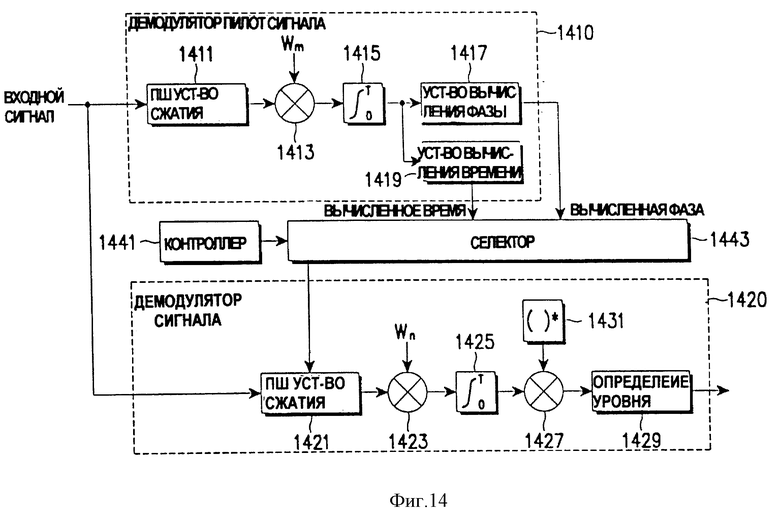
Фиг. 14 есть блок-схема другого примера осуществления приемного устройства для приема сигнала от передающего устройства, имеющего КВРП структуру для передатчиков всех каналов. Отсюда, приемное устройство в этом примере осуществления включает единственный приемник канала пилот-сигнала, поскольку сигнал канала пилот-сигнала также коммутируется по времени для передачи.
В приемнике канала пилот-сигнала 1410 ПШ устройство сжатия 1411 умножает входной сигнал на ПШ последовательность для ПШ сжатия. Умножитель 1413 ортогонально демодулирует сигнал, полученный от ПШ устройства сжатия 1411, путем умножения принятого сигнала на тот же ортогональный код Wm, как тот, что используется в соответствующем передатчике канала пилот-сигнала. Интегратор 1415 интегрирует сигнал, полученный от умножителя 1411, в течение времени Т и суммирует интегрированные значения. Устройство вычисления фазы 1417 анализирует сигнал, полученный от интегратора 1415, и выдает вычисленное значение фазы сигнала канала пилот-сигнала, полученное через передающие антенны.
Контроллер 1441 осуществляет синхронизацию с опорным временем базовой станции и генерирует управляющий сигнал для выбора выходов приемника канала пилот-сигнала 1410 в блоке цикла коммутации по времени. Селектор 1443 избирательно выдает вычисленные значения фазы и времени, полученные от приемника канала пилот-сигнала 1410 на основании сигнала управления контроллера 1441.
В приемнике канала трафика 1420 ПШ устройство сжатия 1421 умножает входной сигнал в момент времени, указанный временным сигналом, полученным от селектора 1443, на ПШ последовательность. То есть, ПШ устройство сжатия 1421 сжимает входной сигнал с помощью ПШ кода в вычисленный момент времени переключения. Умножитель 1423 умножает ортогональный код [Wn], используемый в соответствующем передатчике канала трафика, на сигнал, полученный от ПШ устройства сжатия 1421. Интегратор 1425 интегрирует сигнал, полученный от умножителя 1423 в течение времени Т и суммирует интегрированные значения. Преобразователь знака фазы 1431 изменяет знак величины фазы, полученной от селектора 1443. Умножитель 1427 умножает выходной сигнал интегратора 1425 на выходной сигнал конвертора знака фазы 1431, чтобы синхронизировать фазу входного сигнала. Блок определения уровня 1429 детектирует уровень сигнала, полученного от умножителя 1427, и изменяет уровень сигнала до уровня серого. Сигнал, выходящий из блока определения уровня 1429, подается к декодеру в приемнике.
Приемное устройство, показанное на фиг. 14, показывает пример, где КВРП выполнено на канале пилот-сигнала, а также на каналах трафика. Поскольку один ортогональный код использован для канала пилот-сигнала, который отличается от приемного устройства с фиг. 13, вся необходимая синхронизация и вычисленные фазы могут быть генерированы путем использования единственного приемника канала пилот-сигнала 1410 с применением того же способа коммутации по времени, как и используемого для приемника канала трафика 1420.
КВРП на прямой линии связи в системе подвижной связи предлагает следующие эффекты:
(1) только один приемник канала трафика требуется для демодуляции данных пользователя, независимо от количества N передающих антенн, поскольку пользователю доступен один ортогональный код, что позволяет упростить приемник и снижает потребление энергии и стоимость терминала;
(2) длина ортогонального кода не изменяется, благодаря использованию ортогонального кода, применяемого в НПР устройстве. Поэтому не происходит возрастания интервала интегрирования, который включен в обеспечение разнесения по времени, и нет ухудшения характеристики приема, которое могло бы быть внесено условиями канала, такого как частотная ошибка;
(3) количество доступных передающих антенн не ограничено, что, таким образом, не вносит ограничение на другие приложения; и
(4) эффект скремблирования может быть добавлен к усовершенствованию характеристики приема путем применения различных способов коммутации к пользователям в базовой станции.
Поскольку настоящее изобретение было подробно описано со ссылкой на конкретные примеры осуществления, они являются просто примерными применениями. Таким образом, должно быть вполне понятно, что много изменений может быть сделано любым опытным специалистом в пределах объема и сущности настоящего изобретения.
Передающее устройство с разнесением по времени в базовой станции системы подвижной связи. Передающее устройство имеет множество передающих антенн, РЧ (радиочастотных) передатчиков, по числу передающих антенн, присоединенных к их соответствующим передающим антеннам, для выдачи сигналов в прямую линию связи, контроллер для генерации сигнала управления коммутатором в неперекрываемом временном цикле, ортогональный модулятор для модуляции сигнала передачи ортогональным кодом, устройство расширения для расширения выходного сигнала ортогонального модулятора и коммутатор, присоединенных к выходному терминалу устройства расширения, для присоединения выхода устройства расширения к соответствующему передатчику на основании сигнала управления коммутатором. Согласно другой особенности настоящего изобретения приемное устройство в подвижной станции системы подвижной связи имеет приемник канала пилот-сигнала для детектирования сигнала канала пилот-сигнала из входного сигнала прямой линии связи и генерации вычисленных величин фазы и времени, контроллер для генерации сигнала управления выбором на основании информации цикла и информации шаблона коммутации, в синхронизации с опорным временем базовой станции, селектор для избирательной выдачи вычисленных значений фазы и времени, полученных от приемника канала пилот-сигнала на основании сигнала управления выбором, и приемник канала трафика для детектирования сигнала канала трафика в выбранный вычисленный момент времени и коррекции фазовой ошибки детектированного сигнала канала трафика на основании вычисленного значения фазы, для декодирования сигнала. Техническим результатом является создание коммутируемого по времени разнесения передачи устройства, в котором сигнал передачи базовой станции распределен к множеству антенн путем коммутации по времени. 5 с. и 11 з.п.ф-лы, 14 ил.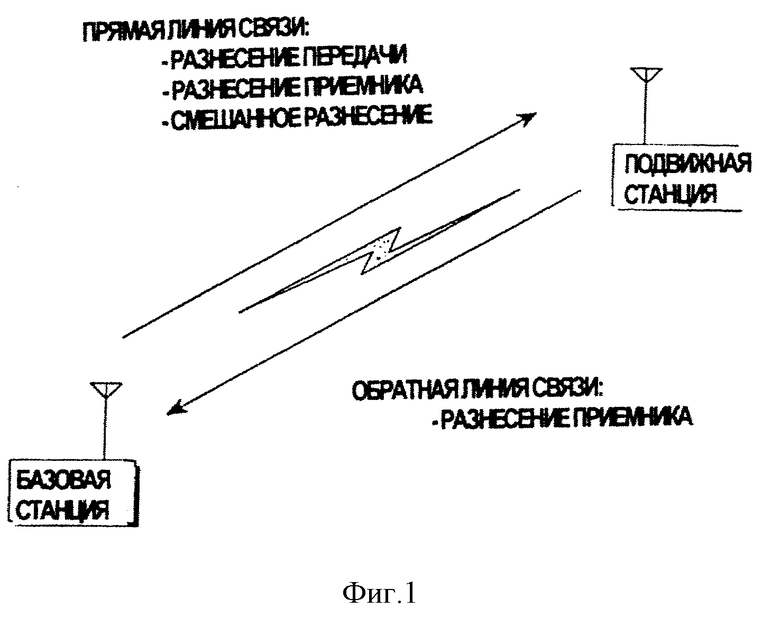
| Способ управления компенсирующим устройством | 1977 |
|
SU744841A1 |
| Устройство передачи и приема шумоподобных сигналов | 1987 |
|
SU1631737A1 |
| US 5103459 A, 07.04.1992 | |||
| Устройство для разнесенного приема широкополосных сигналов | 1976 |
|
SU611304A1 |
