Изобретение относится к машиностроению и может быть использовано в транспортном машиностроении, в частности в автомобилестроении и станкостроении.
Известна инерционная передача, содержащая водило с радиальными осями, установленные на них и сблокированные по два сателлиты, выполненные из конических колес, и несущие маховики, расположенные по одну сторону от радиальных осей центральные конические колеса, каждое из которых взаимодействует с соответствующим сателлитом с образованием с последними конических пар с разными передаточными отношениями. У этой передачи ведомый и ведущий валы связаны механизмом свободного хода, ведущий элемент которого установлен на ведомом валу, а ведомый элемент - на ведущем валу. При этом функции маховиков выполняют также блоки сателлитов, для чего они выполнены массивными (патент РФ N 2072717, МПК F 16 H 33/10, 3/74, 27.01.97, Бюл. N 3).
У этой инерционной передачи, способной изменять частоту вращения выходного вала в зависимости от приложенной к нему нагрузки, отсутствует внешняя опора (опора на корпус) при передаче вращающего момента, что ограничивает возможности автоматического изменения величины вращающего момента, передаваемого от ведущего вала на ведомый вал.
Наиболее близким по совокупности признаков техническим решением к заявленной передаче является инерционная передача, содержащая корпус, соосные ведущий и ведомый валы, закрепленные на последних ведущее и ведомое центральные конические зубчатые колеса, установленное с возможностью вращения вокруг оси передачи водило с радиальными осями, на которых с возможностью вращения установлены сателлиты с маховиками. Передача снабжена жестко соединенным с корпусом опорным зубчатым колесом, введенным в зацепление с сателлитами, несущими маховики и сблокированными по два сателлита, внутренними и внешними относительно оси передачи, для зацепления с разными центральными коническими зубчатыми колесами и составляющими с ними пары конических колес, имеющих разные по величине передаточные отношения. Ведущее и ведомое конические зубчатые колеса размещены по одну сторону от радиальных осей водила, а блоки сателлитов и сателлиты с маховиками размещены на радиальных осях водила с возможностью независимого друг от друга вращения.
Ведущие и ведомые валы связаны механизмом свободного хода, ведущая обойма которого связана с ведомым валом, а ведомая - с ведущим валом (патент РФ N 2072716, МПК 6 F 16 H 33/10, 3/74, 27.01.97, Бюл. N 3).
У этой инерционной передачи понижается КПД и эффективность использования мощности двигателя при увеличении частоты вращения выходного вала, поскольку при этом прогрессивно уменьшается величина передаваемого на выходной вал вращающего момента.
Предлагаемое изобретение обеспечивает расширение диапазона автоматического бесступенчатого изменения силового передаточного отношения между входным и выходным валами в прямой зависимости от нагрузки на выходном валу и в обратной зависимости от частоты вращения выходного вала. Предложенная передача позволяет передавать вращающий момент с более высокими показателями КПД при любых режимах работы, в том числе при высокой частоте вращения выходного вала.
Указанный технический результат достигается тем, что автоматическая бесступенчатая механическая передача содержит соосные входной и выходной валы, закрепленные на этих валах ведущее и ведомое центральные конические зубчатые колеса, установленное с возможностью вращения вокруг оси передачи водило с радиальными осями, на которых с возможностью вращения установлены симметрично оси передачи сателлиты - основные и вспомогательные. Основные сателлиты выполнены в виде сблокированных по два конических зубчатых колес - внутренних и внешних относительно оси передачи, введенных в зацепление с разными центральными колесами и составляющих с ними пары конических колес, имеющих разные по величине передаточные отношения. С корпусом передачи жестко соединено зубчатое коническое центральное неподвижное опорное колесо, введенное в зацепление со вспомогательными сателлитами. Ведущее и ведомое центральные конические зубчатые колеса размещены по одну сторону от радиальных осей водила, а блоки основных сателлитов и вспомогательные сателлиты размещены на радиальных осях водила с возможностью независимого друг от друга вращения. Согласно изобретению на входном валу жестко закреплено подвижное опорное колесо, введенное в зацепление с дополнительными сателлитами, размещенными по обе стороны от оси передачи на радиальных осях водила с возможностью независимого вращения от основных и вспомогательных сателлитов.
Сателлиты выполнены с массивными ободами и одновременно с передачей вращающих моментов и вращательных движений выполняют также функции маховиков.
Как частный случай выполнения сателлиты жестко соосно связаны с размещенными на радиальных осях водила маховиками.
Как частный случай выполнения передача содержит две размещенные на одной диаметральной линии радиальные оси водила, на каждой из которых с возможностью независимого друг от друга вращения размещены основные, вспомогательные и дополнительные сателлиты.
Как частный случай выполнения водило содержит две пары перпендикулярных между собой радиальных осей и на каждой из этих пар радиальных осей размещены с возможностью независимого друг от друга вращения соответственно основные или дополнительные, или вспомогательные сателлиты в любых сочетаниях.
Геометрические оси радиальных осей водила и геометрическая ось передачи пересекаются в центральной точке, совмещенной с этими осями.
Входной и выходной валы связаны механизмом свободного хода, ведущий элемент которого связан с выходным валом, а ведомый элемент - с входным валом.
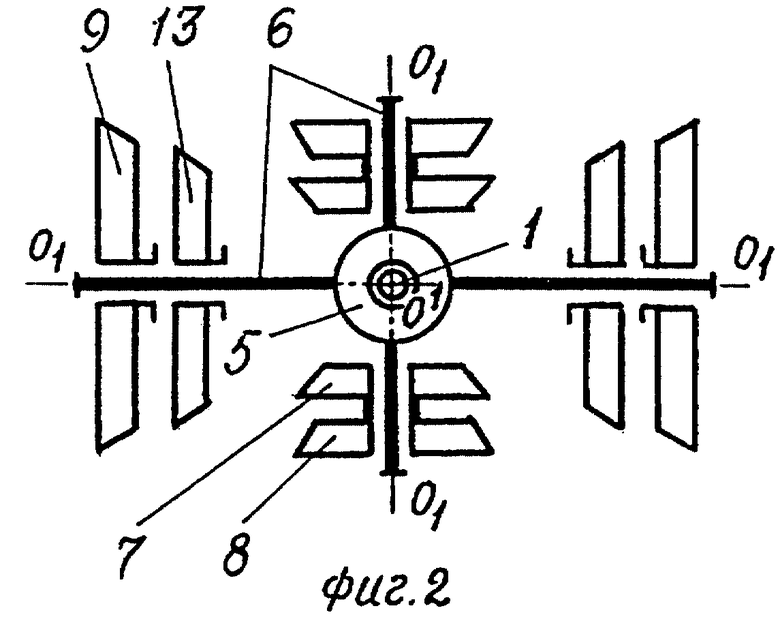
На фиг. 1 дан общий вид автоматической бесступенчатой механической передачи (далее - "передача") с показом ее элементов и отличительных признаков, характеризующих изобретение. На фиг. 2 показано устройство передачи в частном случае ее выполнения с изображением только тех ее элементов, которые попадают в плоскость сечения, перпендикулярную геометрической оси передачи и совмещенную с радиальными осями водила. При этом приведен вариант устройства без применения маховиков.
Передача содержит соосные входной 1 и выходной 2 валы, закрепленные на них ведущее 3 и ведомое 4 центральные конические зубчатые колеса и установленное с возможностью вращения вокруг оси O-O передачи водило 5 с радиальными осями 6, на которых с возможностью вращения установлены симметрично оси O-O передачи сателлиты - основные 7, 8 и вспомогательные 9. Основные сателлиты выполнены в виде сблокированных по два конических зубчатых колес - внутренних 7 и внешних 8 относительно оси O-O передачи, введенных в зацепление соответственно с ведущим 3 и ведомым 4 центральными коническими колесами и составляющих с ними пары конических зубчатых колес 3, 7 и 8, 4, имеющих разные по величине передаточные отношения. С корпусом 10 передачи жестко соединено зубчатое коническое центральное неподвижное опорное колесо 11, введенное в зацепление со вспомогательными сателлитами 9. Ведущее 3 и ведомое 4 центральные зубчатые колеса размещены по одну сторону от радиальных осей 6 водила 5. Блоки основных сателлитов 7, 8 и вспомогательные сателлиты 9 размещены на радиальных осях 6 водила 5.
На входном валу 1 жестко закреплено подвижное опорное колесо 12, введенное в зацепление с дополнительными сателлитами 13, размещенными по обе стороны от оси O-O передачи на радиальных осях 6 водила 5.
Сателлиты 7, 8, 9, 13 выполнены с массивными ободами и одновременно с передачей вращающих моментов и вращательных движений выполняют также функции маховиков.
Как частный случай выполнения сателлиты 7, 8, 9, 13 жестко соосно связаны со своими размещенными на радиальных осях 6 водила 5 маховиками 14.
Как частный случай выполнения, изображенный на фиг. 1, передача содержит две размещенные на одной диаметральной линии O1-O1 радиальные оси 6 водила 5, на каждой из которых с возможностью независимого друг от друга вращения размещены основные 7, 8, вспомогательные 9 и дополнительные 13 сателлиты.
Как частный случай выполнения, изображенный на фиг. 2, водило 5 содержит две пары перпендикулярных между собой радиальных осей 6 и на каждой из этих пар радиальных осей размещены с возможностью независимого друг от друга вращения соответственно основные 7, 8 или дополнительные 13, или вспомогательные 9 сателлиты в любых сочетаниях. На фиг. 2 показано, что на одной паре осей 6 размещены сблокированные основные сателлиты 7, 8, а на другой паре радиальных осей 6 размещены дополнительные 13 и вспомогательные 9 сателлиты.
Геометрические оси O1-O1 радиальных осей 6 водила 5 и геометрическая ось O-O передачи пересекаются в центральной точке O1.
Входной 1 и выходной 2 валы связаны механизмом свободного хода 15, ведущий элемент которого связан с выходным валом 2, а ведомый элемент - с выходным валом 1.
Автоматическая бесступенчатая механическая передача работает следующим образом.
За исходное положение принимается, что входной вал 1 вращается с постоянной частотой и передает неизменный по величине вращающий момент.
При вращении входного вала 1 вместе с установленным на нем ведущим колесом 3 и неподвижном выходном вале 2 с установленным на нем ведомым колесом 4 в связи с приложенной к указанному выходному валу нагрузкой или началом вращения из неподвижного положения ведущее колесо 3 приводит во вращение вокруг радиальных осей 6 водила 5 сблокированные основные сателлиты 7, 8. Внешний основной сателлит 8 перекатывается по неподвижному ведомому колесу 4 и вовлекает водило 5 с его радиальными осями 6 во вращение вокруг оси O-O передачи. Водило 5 с его радиальными осями 6 вращается при этом с максимальной частотой в противоположном направлении по отношению к вращению входного вала 1.
Вместе с водилом 5 с его радиальными осями 6 вокруг оси O-O передачи вращаются основные 7, 8, дополнительные 13 и вспомогательные 9 сателлиты и соосно сблокированные с ними маховики 14.
Вспомогательные сателлиты 9 обкатываются по закрепленному в корпусе 10 передачи неподвижному опорному колесу 11 и вращаются одновременно вокруг оси O-O передачи и геометрической оси O1-O1 радиальных осей 6 водила, что равнозначно их вращению относительно центральной точки O1 пересечения упомянутых осей. При этом частота вращения вспомогательных сателлитов 9 вокруг осей O-O и O1-O1 и относительно центральной точки O1 будет максимальной.
Вместе с тем, подвижное опорное колесо 12 приводит во вращение вокруг геометрических осей O1-O1 радиальных осей 6 водила дополнительные сателлиты 13. В связи с тем, что водило 5 с его радиальными осями 6 и подвижное опорное колесо 12 вращаются в противоположных направлениях, дополнительные сателлиты 13 будут вращаться с максимальной частотой. Одновременное вращение дополнительных сателлитов 13 вокруг оси O-O передачи и геометрических осей O1-O1 радиальных осей 6 водила равнозначно их вращению относительно центральной точки O1 пересечения указанных осей и это вращение будет происходить с максимальной частотой.
Из сказанного выше следует, что при неподвижном выходном вале 2 и максимальной частоте вращения водила 5 с его радиальными осями 6 вокруг оси O-O передачи все сателлиты 7, 8, 9 и 13 будут совершать вращение относительно центральной точки O1 с максимальной частотой.
Известно, что момент количества движения при вращении тела относительно точки является векторной величиной и направление этого вектора совпадает с направлением оси вращения непосредственно тела ("Политехнический словарь" под ред. академика А. Ю. Ишлинского, изд. "Советская энциклопедия", М. - 1980, стр. 310/2). Но поскольку геометрические оси O1-O1 радиальных осей водила совершают вращение вокруг оси O-O передачи и относительно центральной точки O1 пересечения этих осей, направление векторов моментов количества движения сателлитов 7, 8, 9, 13 постоянно изменяется.
Известно, что действия над векторами являются отражением соответствующих действий над векторными величинами, а векторные величины являются равными, если совпадают их числовые значения и направления (см. там же, стр. 73/1).
Момент количества движения проявляется с соблюдением всеобщего физического закона сохранения и может быть изменен только под действием внешних сил. Проявление указанного всеобщего закона сохранения у вращающихся относительно центральной точки O1 упомянутых выше сателлитов противодействует вращению радиальных осей 6 водила 5 вокруг оси O-O передачи. В связи с этим радиальные оси водила являются опорой для передачи вращающего момента от входного вала 1 и ведущего колеса 3 через блок основных сателлитов 7, 8 на ведомое колесо 4 и выходной вал 2.
При указанном исходном положении работы передачи, приведенном выше, все сателлиты 7, 8, 9, 13 вращаются относительно центральной точки O1 с максимальной частотой и создают максимальные по величине моменты сил, противодействующие вращению радиальных осей 6 водила 5 вокруг оси O-O передачи. Этим обеспечивается возможность передачи на выходной вал 2 максимального по величине вращающего момента, зависящего от передаточных отношений размещенных последовательно двух пар зацепляющихся колес - ведущего колеса 3, внутреннего основного сателлита 7 и внешнего основного сателлита 8, ведомого колеса 4.
При начале вращения выходного вала 2 и по мере увеличения частоты его вращения частота вращения водила 5 с его радиальными осями 6 вокруг оси O-O передачи уменьшается, поскольку ведомое колесо 4 начинает вращаться в одном направлении с входным валом 1 и ведущим колесом 3. Соответственно уменьшается частота вращения всех упомянутых выше сателлитов 7, 8, 9, 13 вокруг оси O-O передачи и относительно центральной точки O1. Вместе с этим уменьшаются тормозящие моменты силы, передаваемые сателлитами на радиальные оси 6 водила с соответствующим уменьшением передаваемого на выходной вал 2 вращающего момента. При этом проявляется закономерность, заключающаяся в том, что величина передаваемого на выходной вал 2 вращающего момента находится в обратной зависимости от частоты вращения этого вала.
При одинаковой частоте вращения входного вала 1 и выходного вала 2 (прямая передача) оба этих вала, водило 5 с его радиальными осями 6 и подвижное опорное колесо 12 будут вращаться как единое целое. Противодействие вращению водила 5 с его радиальными осями 6 вокруг оси O-O передачи при этом будет обеспечиваться только за счет вращения вспомогательных сателлитов 9 относительно центральной точки O1, поскольку указанные сателлиты при вращении водила 5 с его радиальными осями 6 будут перекатываться по неподвижному опорному колесу 11 при одновременном вращении вокруг оси O-O передачи, что равнозначно их вращению относительно центральной точки O1 с проявлением при этом всеобщего закона сохранения момента количества движения.
Исходя из сказанного выше, следует, что предложенная передача обеспечивает силовую связь входного вала 1 и выходного вала 2 с преобразованием передаваемого вращающего момента при любых соотношениях в частотах вращения указанных валов.
Приведенное выше описание работы передачи не имеет отличий в обоих частных случаях ее выполнения с массивными ободами сателлитов или с маховиками.
При частном случае выполнения передачи, приведенном на фиг. 2, когда водило 5 содержит две пары перпендикулярных между собой радиальных осей 6, взаимодействие всех элементов передачи не имеет отличий от приведенного выше описания, поскольку все силовые и кинематические связи остаются без изменений.
Приведенные в описании и формуле изобретения частные случаи ее выполнения позволяют конкретизировать устройство, но не изменяют изложенный выше характер ее работы.
При необходимости передачи вращающего момента и вращения от выходного вала 2 на входной вал 1 с целью торможения рабочей машины (например, при движении ее под уклон) работа двигателя прекращается. При этом под воздействием вращающего момента, передаваемого от выходного вала на входной вал, происходит замыкание механизма свободного хода 15, который обеспечивает передачу потока мощности от выходного вала на входной вал и далее на двигатель, принудительное вращение вала которого приводит к торможению рабочей машины. Таким же образом производится запуск двигателя путем буксировки транспортной машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171931C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2172878C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171930C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2174202C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2174201C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171933C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171932C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2004 |
|
RU2277653C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2174204C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171929C2 |
Изобретение относится к машиностроению. На соосных входном 1 и выходном 2 валах установлены соответственно ведущее 3 и ведомое 4 центральные колеса, введенные порознь в зацепление с основными сателлитами 6, 8, которые соединены в единый блок и размещены на радиальных осях 6 водила 5, на которых также размещены с возможностью независимого друг от друга вращения вспомогательные 9 и дополнительные 13 сателлиты, первые из которых введены в зацепление с закрепленным в корпусе 10 передачи неподвижным опорным колесом 11, а дополнительные сателлиты находятся в зацеплении с подвижным опорным колесом 12, закрепленным на входном валу. Водило с его радиальными осями размещено с возможностью свободного вращения на входном или выходном валу. Сателлиты выполнены с массивными ободами и, как частный случай выполнения, соосно связаны с маховиками 14. Ведущее и ведомое центральные колеса размещены по одну сторону от водила 5. Расширен диапазон автоматического бесступенчатого изменения силового передаточного отношения между входным и выходным валами в зависимости от нагрузки и частоты вращения выходного вала. 6 з.п. ф-лы, 2 ил.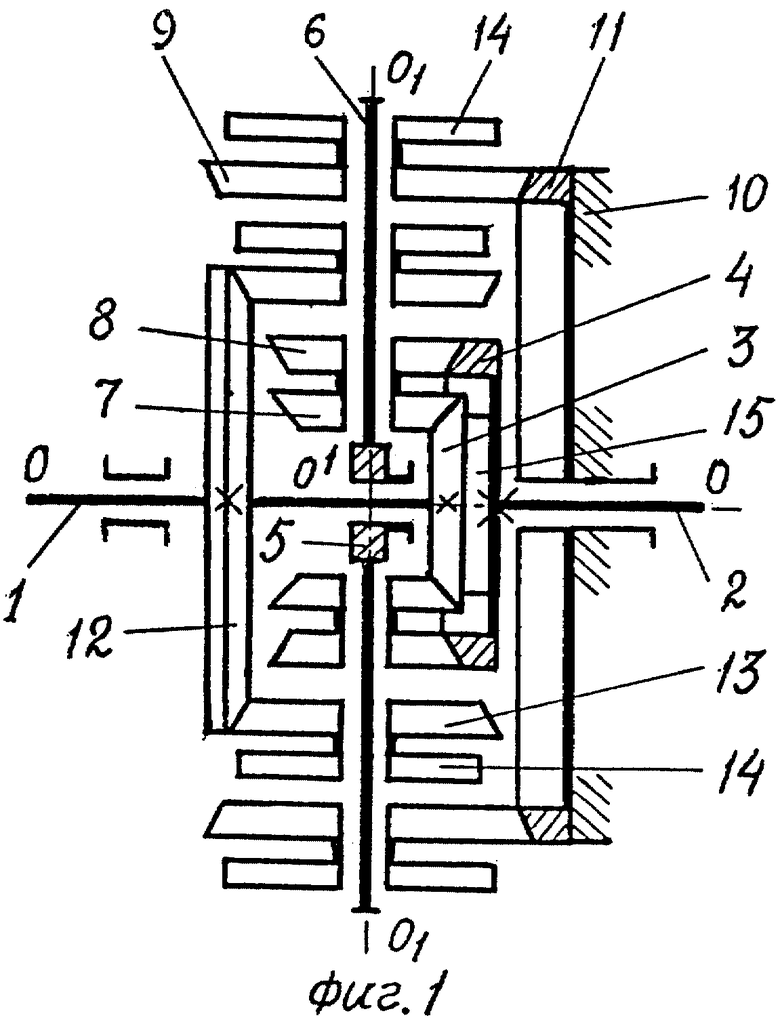
| ИНЕРЦИОННАЯ ПЕРЕДАЧА | 1994 |
|
RU2072716C1 |
| ИНЕРЦИОННАЯ ПЕРЕДАЧА | 1994 |
|
RU2072717C1 |
| ИНЕРЦИОННАЯ ПЕРЕДАЧА | 1994 |
|
RU2072715C1 |

