Изобретение относится к электротехнике, а именно к управлению электрическими машинами, и может быть использовано в электроприводе для ступенчатого регулирования скорости асинхронного электродвигателя в сторону ее уменьшения.
Известен способ ступенчатого регулирования скорости асинхронного электродвигателя изменением числа пар его полюсов [1]. В этом случае на статоре размещается несколько обмоток или одна обмотка, предполагающая возможность коммутации ее секций. Такие многоскоростные электродвигатели имеют большие массу и габариты, сложнее конструктивно и дороже, чем электродвигатели нормального исполнения.
Как известно из уровня техники, скорость асинхронного электродвигателя определяется зависимостью:
Следовательно, при неизменном числе пар полюсов p и величине скольжения s, скорость электродвигателя n определяется частотой питающего напряжения питающей сети f. Известен способ ступенчатого регулирования скорости асинхронного электродвигателя путем переключения его от сети к источнику напряжения пониженной частоты [2]. Однако в этом случае необходим источник пониженной частоты и сложная система коммутации сети постоянного и переменного тока. Кроме того, необходим соответствующий источник постоянного тока.
Известен способ квазичастотного регулирования скорости асинхронного электродвигателя [3] в сторону ее уменьшения, который характеризуется тем, что позволяет получать регулируемую частоту напряжения на статоре асинхронного электродвигателя (АД) в области ниже номинальной с помощью тиристорных регуляторов напряжения (ТРН). Этот способ обеспечивает получение низких скоростей асинхронного электрического привода (ЭП), которые необходимы при работе, например, различных грузоподъемных механизмов, и включает следующие операции:
1) формирование сигнала, задающего режим квазичастотного регулирования, который может представлять собой двоичный код, импульсно-кодовую последовательность, а также ток или напряжение фиксированной величины, который определяет частоту и амплитуду напряжения питания, подаваемого на электродвигатель;
2) синтез напряжения питания АД из элементов напряжения питающей сети.
Сформированное напряжение питания АД является полигармоничным и содержит как гармонику пониженной частоты, так и сетевую и более высокие частотные составляющие.
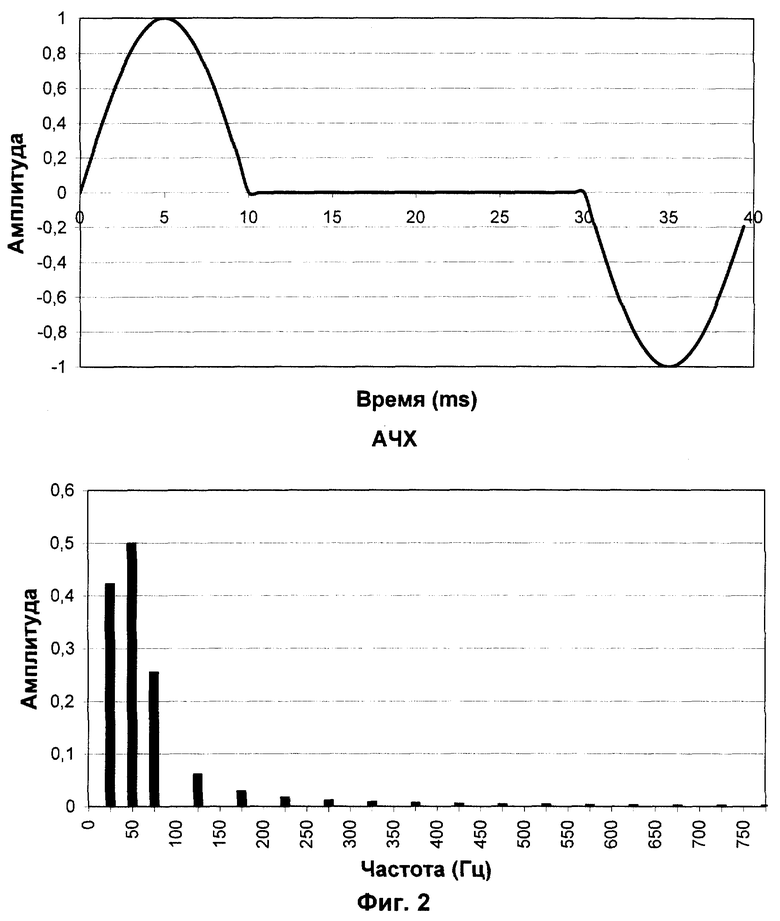
Основной недостаток принятого за прототип известного способа заключается в том, что в спектре подаваемого на электродвигатель напряжения питания амплитуда гармоники исходной частоты превышает амплитуду гармоники пониженной частоты. Это иллюстрируется амплитудно-частотными характеристиками (АЧХ) напряжения питания АД [4], полученного по известному способу из напряжения питающей сети частотой 50 Гц (фиг. 1, 2). На фиг. 1 представлены форма напряжения питания АД и его АЧХ для случая работы электродвигателя на скорости в два раза ниже номинальной, из которых видно, что задаваемая гармоника частотой 25 Гц имеет амплитуду ~0,43, что меньше амплитуды гармоники частотой 50 Гц, равной 0,5. На фиг. 2 представлены форма напряжения питания АД и его АЧХ для случая работы электродвигателя на скорости в четыре раза ниже номинальной, из которых видно, что задаваемая гармоника частотой 12,5 Гц имеет амплитуду ~ 0,41, что меньше амплитуды гармоники 50 Гц, равной 0,5. Из анализа характеристик следует, что независимо от соотношения номинальной скорости АД и скорости, устанавливаемой в процессе регулирования, амплитуда гармоники частотой 50 Гц является доминирующей. Кроме того, рассматриваемый способ не предусматривает изменения амплитуды напряжения гармоники пониженной частоты, который в зависимости от характера нагрузки может быть пропорционален частоте, или ее квадрату, или квадратному корню из нее [5].
Указанные недостатки накладывают ограничения на область применения известного способа квазичастотного ступенчатого регулирования скорости асинхронного электродвигателя.
Целью изобретения является обеспечение надежного квазичастотного ступенчатого регулирования скорости асинхронного электродвигателя, заключающегося в формировании сигнала, задающего режим квазичастотного регулирования, и синтезе с помощью коммутаторов напряжения питания асинхронного электродвигателя.
Предлагаемый способ квазичастотного ступенчатого регулирования скорости асинхронного электродвигателя предусматривает следующие операции:
1) формирование синхроимпульсов, привязанных к моментам перехода напряжения питающей сети через ноль;
2) формирование сигнала, задающего режим квазичастотного регулирования, как последовательности импульсов тока или напряжения, фронт и спад которых определяются синхроимпульсами, а длительность и период следования задают в зависимости от соотношения номинальной скорости асинхронного электродвигателя к скорости, устанавливаемой в процессе регулирования [6];
3) формирование сигналов управления коммутаторами как импульсов тока или напряжения, длительность и период следования которых определяют полярность и количество полупериодов напряжения питающей сети в синтезируемом напряжении питания асинхронного электродвигателя, необходимые для преобладания задаваемой гармоники и установки ее амплитуды в синтезируемом напряжении питания асинхронного электродвигателя [6];
4) синтез полупериодов напряжения питания асинхронного электродвигателя из однополярных полупериодов напряжения питающей сети.
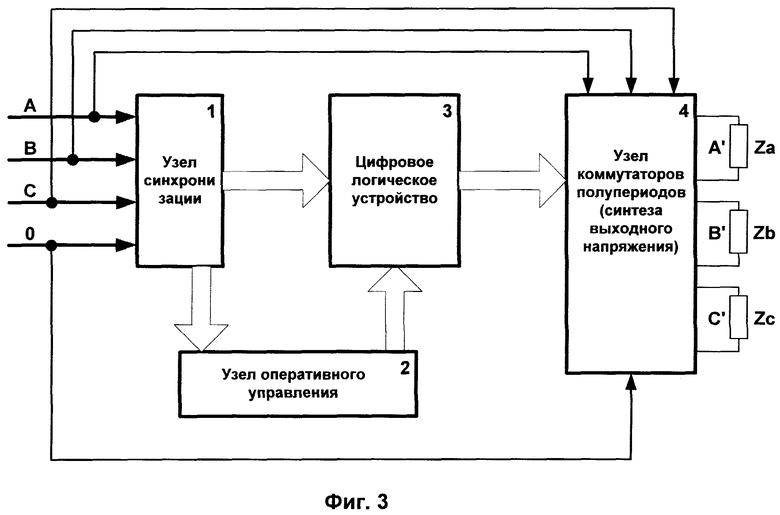
На фиг. 3 представлена структурно-функциональная схема, поясняющая способ. Предложенный способ осуществляется следующим образом. В соответствии с обозначениями на фиг. 3: 1 - узел синхронизации, на вход которого подается напряжение питающей сети. Он выполняет функцию получения синхроимпульсов, жестко привязанных к питающей сети, например, к моменту перехода напряжения через ноль. Упомянутый узел может быть реализован, например, с помощью оптронов и компараторов.
Выходные сигналы узла 1 подаются на узел 2 - узел оперативного управления и узел 3 - цифровое логическое устройство. Они обеспечивают синхронизацию работы этих узлов.
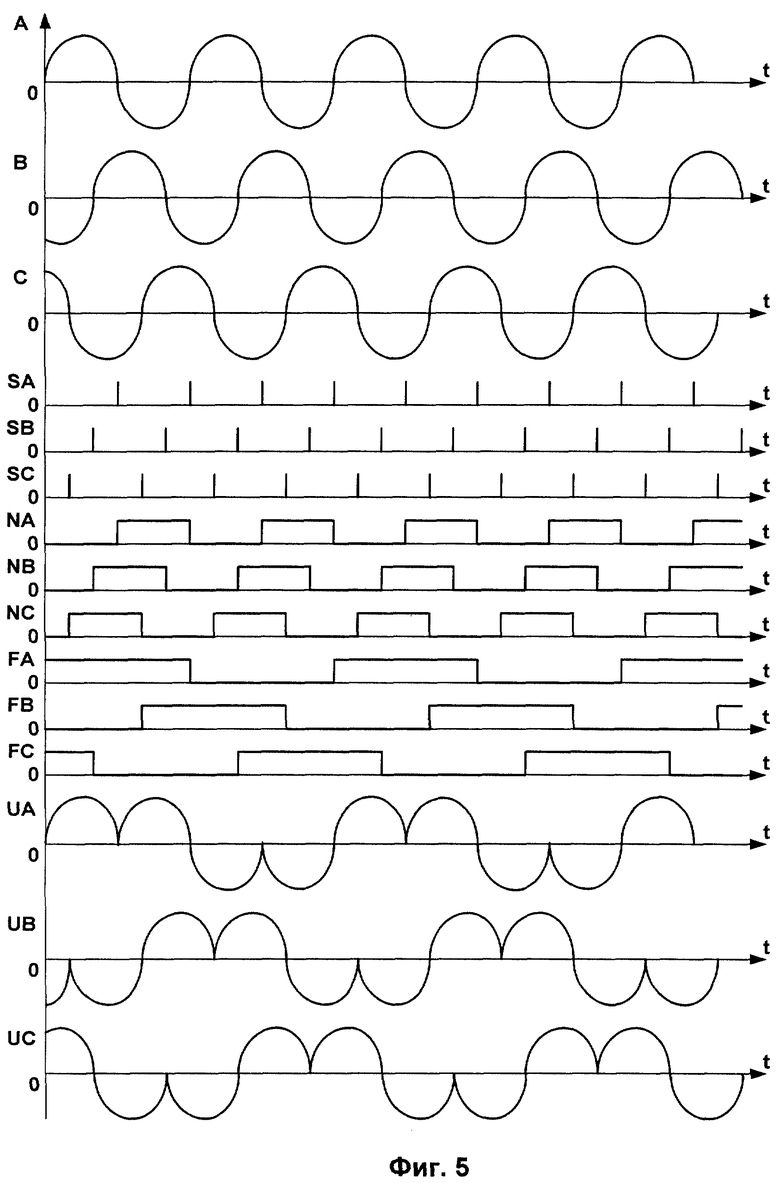
Узел 2 осуществляет операцию формирования сигналов, задающих режим квазичастотного регулирования и задания начальных условий работы узла 3, т. е. значения сигналов NA, NB, NC, поступающих с узла 2 (фиг. 4), в момент включения электропривода (ЭП). Например, см. момент t = 0 на фиг. 5.
Узел 2 может быть выполнен, например, с использованием электронных и (или) механических коммутирующих устройств.
Узел 3 осуществляет формирование сигналов управления коммутаторами полупериодов напряжения питающей сети на базе последовательности синхроимпульсов и сигналов, задающих режим квазичастотного регулирования, представляющих собой последовательность импульсов тока или напряжения, фронт и спад которых определяются синхроимпульсами. Он может быть выполнен, например, на базе цифровых логических элементов [7].
Сигналы управления коммутаторами полупериодов напряжения питающей сети, представляющие собой импульсы тока или напряжения, длительность и период следования которых определяют полярность и количество полупериодов напряжения питающей сети в синтезируемом напряжении питания асинхронного электродвигателя с выхода узла 3, подаются на узел 4 - узел коммутаторов полупериодов, который формирует полупериоды напряжения питания асинхронного электродвигателя из однополярных полупериодов напряжения питающей сети. Одновременно на узел коммутаторов полупериодов подается напряжение питающей сети, из которого формируются последовательности однополярных (например, положительных) полупериодов, из которых затем осуществляется синтез напряжения питания АД с заданными параметрами. При этом осуществляются следующие операции: формирование из синусоидального напряжения питающей сети последовательности однополярных полупериодов и синтез из непрерывной последовательности полупериодов напряжения питания АД с заданными параметрами, т. е. частотой и амплитудой основной гармоники (гармоники с частотой ниже частоты питающей сети). Параметры синтезированного напряжения питания АД определяются длительностью и периодом следования сигнала управления, который позволяет зафиксировать полярность и положение во времени полупериодов напряжения питающей сети в выходном синтезированном напряжении питания (статора) АД. В случае многофазной системы осуществляется необходимый фазовый сдвиг между последовательностями, формируемыми на выходах A', B', C' для питания нагрузок Za, Zb, Zc.
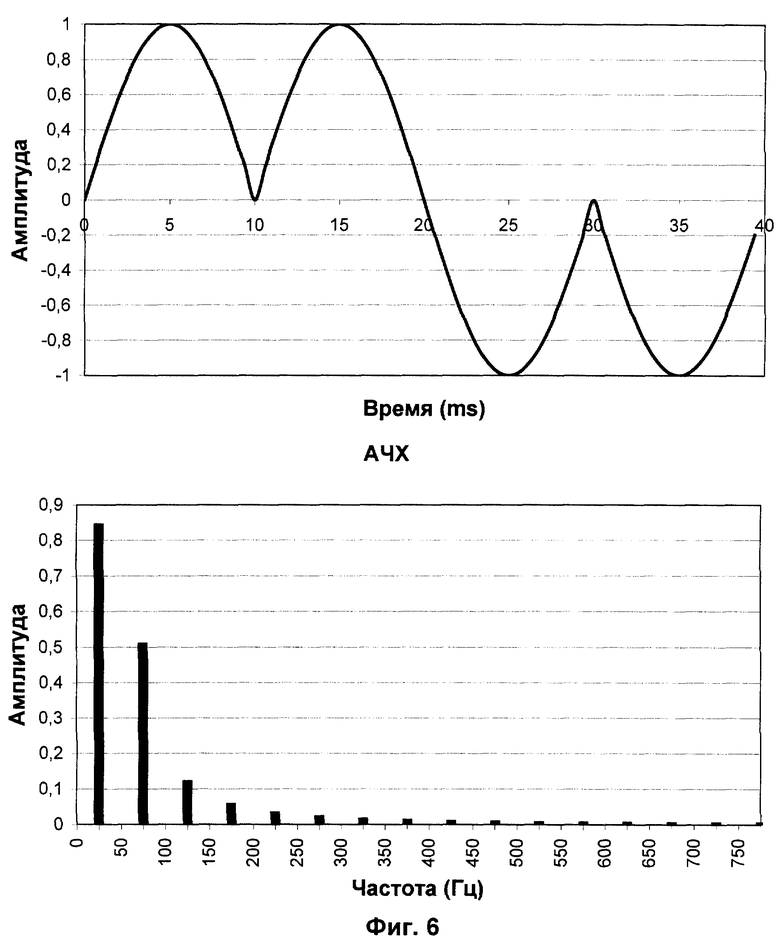
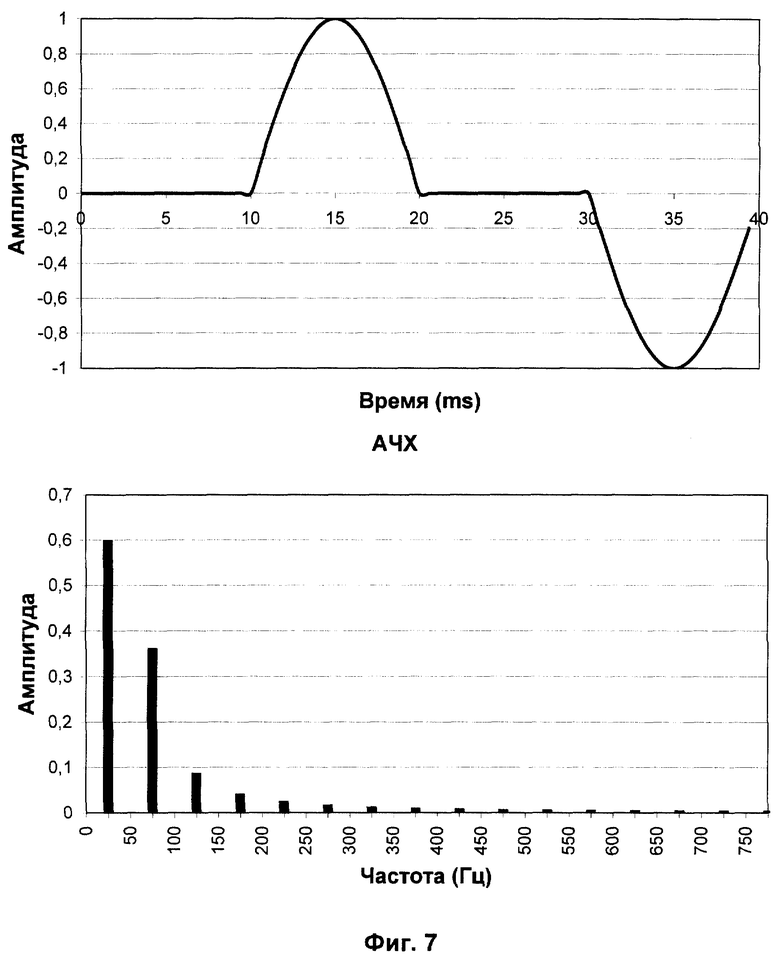
Для иллюстрации предложенного способа на фиг. 6 представлены форма напряжения питания АД и АЧХ для случая двукратного понижения частоты, из которых видно, что амплитуда задаваемой гармоники 25 Гц является преобладающей и равна ~ 0,85, а гармоника напряжения питающей сети 50 Гц - отсутствует. На фиг. 7 представлены форма напряжения питания АД и его АЧХ для двукратного понижения частоты с уменьшением амплитуды первой гармоники, из которых видно, что амплитуда задаваемой гармоники 25 Гц является преобладающей и равна 0,6, а гармоника напряжения питающей сети 50 Гц - отсутствует. Таким образом, в синтезированном напряжении питания асинхронного электродвигателя достигается безусловное преобладание задаваемой гармоники и возможна установка ее амплитуды, что дает возможность выполнения одного из основных условий частотного управления асинхронными электродвигателями.
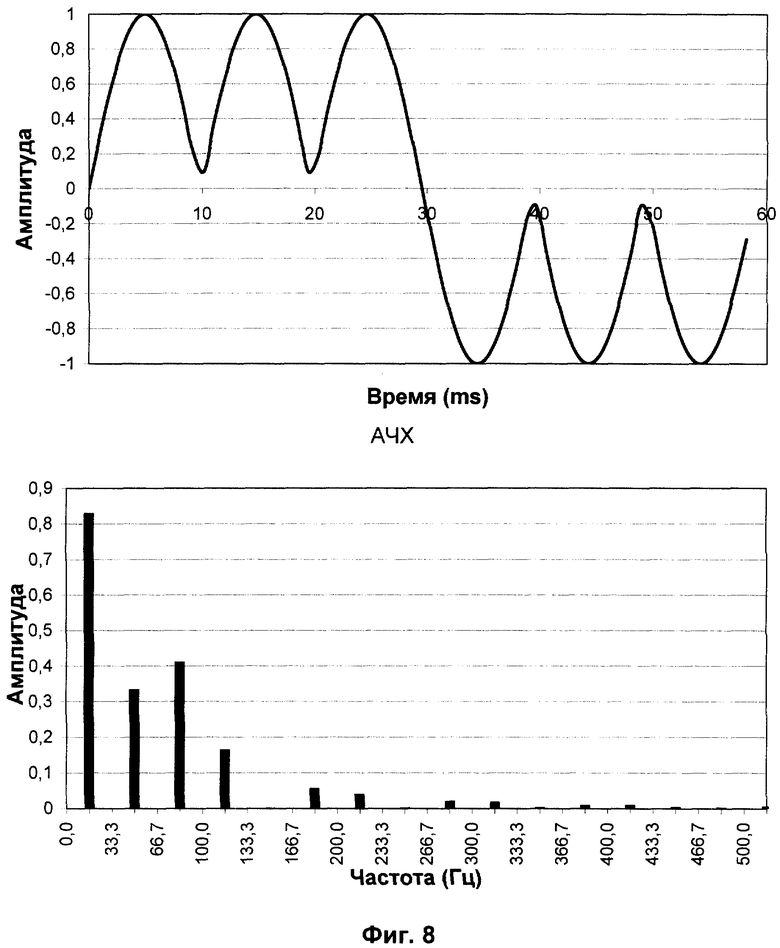
На фиг. 8 представлены форма напряжения питания АД и его АЧХ, иллюстрирующие работу по предложенному способу для трехкратного снижения частоты напряжения питания АД, из которых видно, что амплитуда задаваемой гармоники 16,5 Гц равна ~0,83, а амплитуда гармоники напряжения питающей сети 50 Гц - 0,33. Таким образом, задаваемая гармоника преобладает в синтезированном напряжении питания асинхронного электродвигателя. График одновременно иллюстрирует возможность использования однофазной сети для питания трехфазных асинхронных электродвигателей путем формирования трех независимых последовательностей со сдвигом на один полупериод.
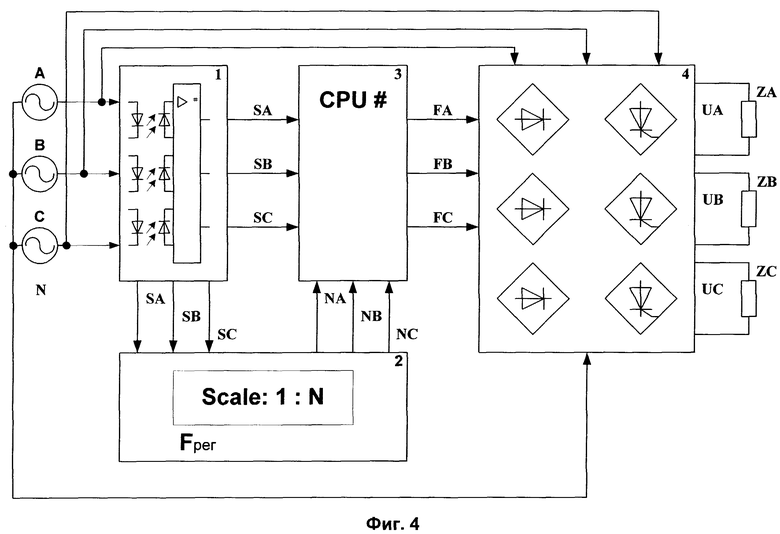
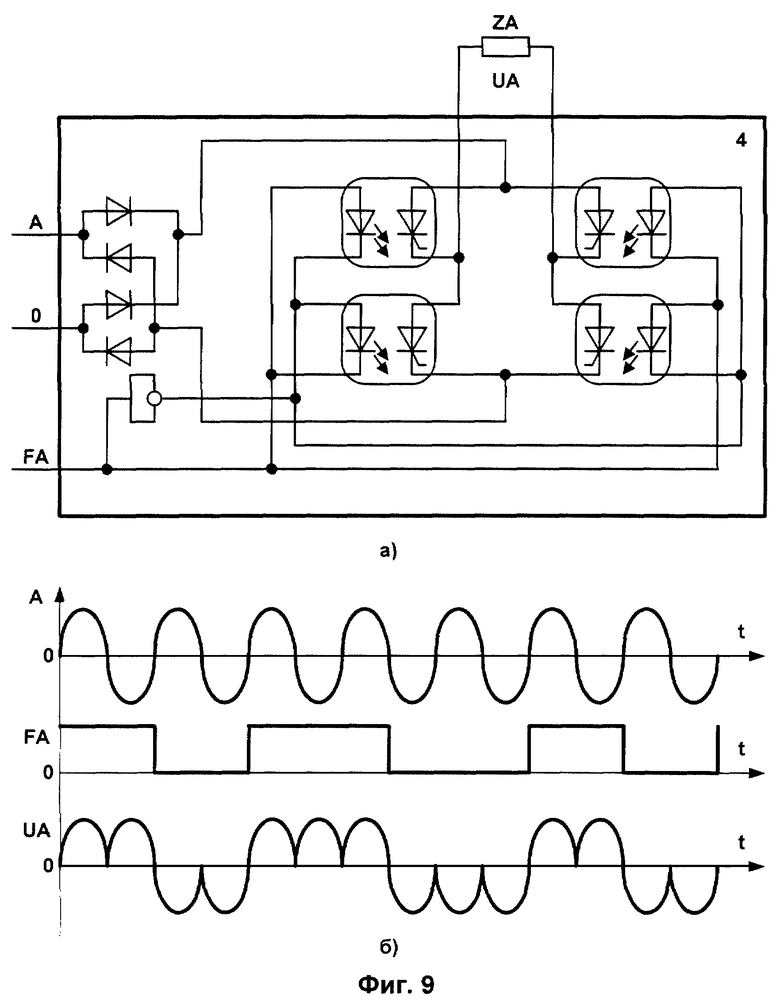
Устройство, реализующее предложенный способ, может быть выполнено, например, по структурной схеме, приведенной на фиг. 4. Оно содержит: узел 1 - узел синхронизации, выполненный, например, на диодных оптронах и компараторах. Входным сигналом узла 1 является трехфазное напряжение питающей сети, из которого формируются последовательности синхроимпульсов, соответствующие переходам напряжения фаз через ноль. Сформированные синхроимпульсы SA, SB, SC поступают на узел 2 - узел оперативного управления и узел 3 - цифровое логическое устройство. Узел 2, задающий функцию регулирования Fрег, определяет параметры каждого из сигналов NA, NB, NC в зависимости от задаваемой скорости АД (режима работы электропривода). Он может быть выполнен, например, на базе мембранной клавиатуры и шифратора, выполненного на логических микросхемах КМОП логики [8]. С выхода узла 2 совокупность сигналов NA, NB, NC, представляющая собой в каждый момент времени код функции управления, подается на узел 3, выполненный, например, на базе микропроцессора [9]. С выхода узла 3 сигналы управления FA, FB, FC подаются на узел 4 - узел коммутаторов полупериодов, выполненный, например, на диодных [10] и тиристорных мостовых схемах [11] . На вход упомянутого узла подается также напряжение питающей сети. На выходах узла 4 синтезируются напряжения питания асинхронного электродвигателя UA, UB, UC, подаваемые на соответствующие обмотки ZA, ZB, ZC статора асинхронного электродвигателя. Вариант реализации узла 4 и временная диаграмма его работы для задаваемых скоростей в два и три раза ниже номинальной представлены на фиг. 9.
Временная диаграмма работы устройства для осуществления способа ступенчатого регулирования скорости асинхронного электродвигателя (фиг. 4), иллюстрирующая работу устройства по предлагаемому способу, представлена на фиг. 5. Обозначения сигналов на осях временных диаграмм полностью соответствуют сигналам, обозначенным на фиг. 4.
Таким образом, предложенный способ обеспечивает надежное квазичастотное ступенчатое регулирование с безусловным преобладанием гармоники заданной частоты и амплитуды в выходном напряжении.
Приведенные сведения подтверждают возможность осуществления предлагаемого изобретения.
Источники информации
1. Волынский Б. А. , Зейн Е.И., Шатерников В.Е. Электротехника. - М.: Энергоатомиздат, 1987, с. 421 - 422.
2. Авторское свидетельство СССР N 322841, МКИ H 02 7/42, опубл. 1971, Бюл. N 36.
3. Москаленко В.В. Электрический привод. - М.: Высшая школа, 1991, - с. 142-143, рис. 5.27.
4. Москаленко В.В. Электрический привод. - М.: Высшая школа, 1991, рис. 5.27б.
5. Москаленко В.В. Электрический привод. - М.: Высшая школа, 1991, - с. 129, (5.29; 5.30; 5.31).
6. Патент РФ 2103798, МКИ H 02 P 5/418. Устройство управления частотой вращения коллекторного электродвигателя переменного тока / А.И. Плохута, Н. Ф. Врублевский. - Опубл. 1998, Бюл. N 3.
7. Пухальский Г.И., Новосельцева Т.Я. Проектирование дискретных устройств на интегральных микросхемах: Справочник. - М.: Радио и связь, 1990. - стр. 116 - 120, рис. 3.28.
8. Губренко И. М., Кучумов Е.В. Телефонные аппараты и таксофоны. - М.: Радио и связь, 1989. - стр. 214 - 217, рис. П1.2.
9. Михайлов С.А. Жесткая логика и микропроцессоры: новые пропорции старого дуализма // Микропроцессорные средства и системы. - 1990. - N 5. - С. 90, рис. 2.
10. Полупроводниковые выпрямители. Под ред. Ф.И. Ковалева и Г.П. Мостовой. Издание второе М.: Энергия, 1978. Рис. 2 - 8, С. 62.
11. Полупроводниковые выпрямители. Под ред. Ф.И. Ковалева и Г.П. Мостовой. Издание второе, М.: Энергия, 1978, глава 4, стр. 177 - 264.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ ВАЛА КОЛЛЕКТОРНОГО ЭЛЕКТРОДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА | 1992 |
|
RU2103798C1 |
| Способ управления асинхронным электроприводом | 1989 |
|
SU1721778A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1772882A1 |
| Электропривод переменного тока | 1988 |
|
SU1599960A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1985 |
|
SU1283925A1 |
| Способ регулирования частоты вращения асинхронного электродвигателя | 1988 |
|
SU1582325A1 |
| Электропривод переменного тока | 1986 |
|
SU1522372A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ МЕХАНИЧЕСКИХ ПОВРЕЖДЕНИЙ ТРЕХФАЗНЫХ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2007 |
|
RU2356061C1 |
| Способ управления преобразователем частоты с непосредственной связью | 1984 |
|
SU1325638A1 |
| СПОСОБ КВАЗИЧАСТОТНОГО МЯГКОГО ПУСКА СИНХРОННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2277289C1 |
Изобретение может быть использовано в электроприводе для ступенчатого регулирования скорости асинхронного электродвигателя. Технический результат, достигаемый изобретением, заключается в улучшении качества и надежности квазичастотного ступенчатого регулирования скорости асинхронного электродвигателя. В способ, включающий формирование сигнала, задающего режим квазичастотного регулирования и синтез с помощью коммутаторов напряжения питания асинхронного электродвигателя, вводятся дополнительные операции: формирование синхроимпульсов, привязанных к моментам перехода напряжения питающей сети через ноль; формирование сигналов управления коммутаторами как импульсов тока или напряжения, длительность и период следования которых определяют полярность и количество полупериодов напряжения питающей сети в синтезируемом напряжении питания асинхронного электродвигателя, необходимые для преобладания задаваемой гармоники и установки ее амплитуды в синтезируемом напряжении питания асинхронного электродвигателя. 9 ил.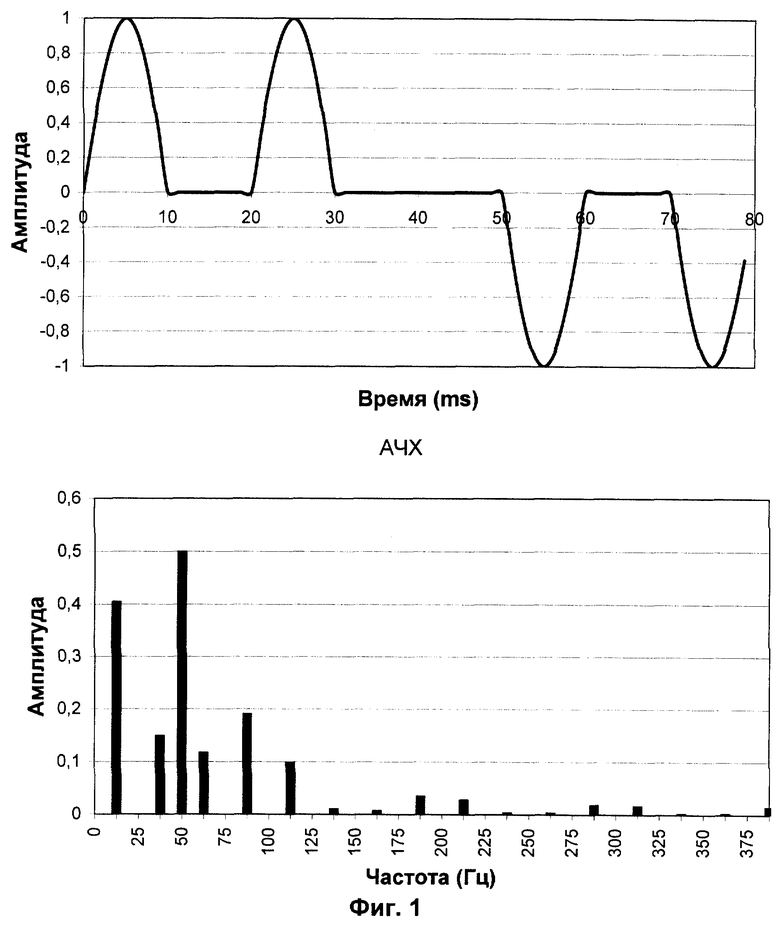
Способ ступенчатого регулирования скорости асинхронного электродвигателя, заключающийся в формировании сигнала, задающего режим квазичастотного регулирования, и синтезе с помощью коммутаторов напряжения питания асинхронного электродвигателя, отличающийся тем, что формируют синхроимпульсы, привязанные к моментам перехода напряжения питающей сети через ноль, формируют сигналы, задающие режим квазичастотного регулирования как последовательность импульсов тока или напряжения, фронт и спад которых определяются синхроимпульсами, а длительность и период следования задают в зависимости от отношения номинальной скорости асинхронного электродвигателя к скорости, устанавливаемой в процессе регулирования, формируют сигналы управления коммутаторами как импульсы тока или напряжения, длительность и период следования которых определяют полярность и количество полупериодов напряжения питающей сети в синтезируемом напряжении питания асинхронного электродвигателя, необходимые для преобладания задаваемой гармоники и установки ее амплитуды в синтезируемом напряжении питания асинхронного электродвигателя, причем каждый полупериод напряжения питания асинхронного электродвигателя состоит из однополярных полупериодов напряжения питающей сети.
| МОСКАЛЕНКО В.В | |||
| Электрический привод | |||
| - М.: Высшая школа, 1991, с.142-143, рис.5.27 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ ВАЛА КОЛЛЕКТОРНОГО ЭЛЕКТРОДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА | 1992 |
|
RU2103798C1 |
| Устройство для управления двигателем переменного тока | 1988 |
|
SU1663732A1 |
| ПАТЕНТВО-ТВ^Й^ЕГЯА!БИБЛИОТЕКА | 0 |
|
SU322841A1 |
| Ртутный или газовый генератор переменного тока, снабженный одной или несколькими сетками для электрического и катушкой для магнитного контроля тока | 1927 |
|
SU17403A1 |
