Изобретение относится к измерительной технике и может быть использовано при контроле параметров средств измерения вибрации.
Одним из важнейших параметров акселерометра является коэффициент преобразования (далее - КП), который определяет его метрологические возможности, и поэтому в обязательном порядке контролируется при периодической поверке акселерометра. Однако существуют ситуации, когда акселерометр невозможно демонтировать с объекта измерения для проведения поверки, ввиду чего используют способы дистанционного электрического воздействия на акселерометр, дающие некоторую информацию о его состоянии.
Известен способ проверки работоспособности пьезоэлектрических датчиков, при котором в цепь "датчик-усилитель" вводят напряжение с частотой, лежащей в рабочем диапазоне частот датчика /1/. При этом уровень сигнала на выходе усилителя зависит от емкости датчика. Постоянство этого уровня при проверках является признаком целостности электрической цепи датчика, которая с определенной вероятностью свидетельствует и о сохранении его свойств средства измерения.
Способ отличается простотой в применении, однако получаемая информация является очень неполной и чаще надежно диагностируется лишь нулевое значение КП, вызванное неисправностью типа обрыва или короткого замыкания.
Наиболее близким к заявляемому по своей технической сущности является способ, использованный в установке для проверки пьезодатчиков, при котором датчик подключают к генератору коротких электрических импульсов, вследствие чего на электродах пьезоэлемента появляются пакеты затухающих колебаний с резонансной частотой датчика. После усиления этот сигнал выпрямляют и его постоянную составляющую измеряют стрелочным прибором, по показанию которого судят о работоспособности датчика. Для повышения достоверности проверки сигнал датчика наблюдают также на экране электронного осциллографа /2/.
Данный способ позволяет контролировать не только состояние электрической цепи датчика, но и свойство пьезоэлемента преобразовывать механическую энергию в электрическую. Вместе с тем точность этого контроля низка, так как используемый способ возбуждения резонансных колебаний не обеспечивает их высокой стабильности, а метод выделения количественной характеристики преобразования энергии в датчике - постоянной составляющей выпрямленного сигнала - чувствителен к влиянию медленных электрических переходных явлений в материале пьезоэлемента и процессов разрядки емкостей в цепи датчика. Поэтому такой способ предназначен именно для оценки работоспособности, а не для контроля КП датчика.
Основным техническим результатом заявляемого способа является возможность дистанционного контроля КП пьезоэлектрического акселерометра и, как следствие, повышение точности измерения вибрации при длительной эксплуатации акселерометра без демонтажа его с объекта измерения.
Поставленная цель достигается тем, что при дистанционном периодическом контроле коэффициента преобразования пьезоэлектрического акселерометра путем электрического возбуждения его резонансных колебаний, их регистрации и анализа, в каждом цикле контроля возбуждение осуществляют подключением акселерометра к источнику постоянного напряжения с последующими отключением и кратковременным замыканием выводов акселерометра, начальный цикл контроля проводят сразу после установки акселерометра на объект измерений, в каждом цикле определяют значение параметра
где /q+ - q-/i - размах сигнала акселерометра в i-ом полупериоде колебаний;
N - число учтенных полупериодов, выбранное в начальном цикле,
а значение коэффициента преобразования Sn в n-м цикле контроля определяют по формуле
где S0 - начальное значение коэффициента преобразования, определенное прямой поверкой;
Qn и Q0 - значения параметра Q в n-м и начальном циклах соответственно.
Сущность заявляемого способа поясняется фиг. 1, на которой представлен участок одной из полученных экспериментально осциллограмм резонансных колебаний и обозначены максимум (q+) и минимум (q-) сигнала акселерометра в одном из полупериодов колебаний.
Способ осуществляют следующим образом. После установки акселерометра на объект его подключают к источнику постоянного напряжения, затем отключают и кратковременным замыканием выводов возбуждают его резонансные колебания, регистрируют их и выбирают интервал записи, на котором вычисляют сумму размахов колебаний в каждом из полупериодов общим числом N, а затем и значение корня квадратного из этой суммы, т.е. находят начальное значение параметра Q, равное Q0.
После этого акселерометр подключают к штатной аппаратуре для работы по основному назначению. По прошествии межконтрольного промежутка времени операцию возбуждения резонансных колебаний повторяют и вычисляют на том же интервале записи новое значение параметра Q = Q1. Сравнивая его с начальным значением, по приведенной формуле находят новое значение КП акселерометра. Таким же образом проводят и последующие циклы контроля.
Изложенная процедура контроля обосновывается следующим образом. При подключении акселерометра к источнику постоянного напряжения U пьезоэлемент получает абсолютную деформацию y=dU, где d - используемый пьезомодуль. После окончания замыкания пьезоэлемента, нейтрализовавшего заряды на его электродах, он переходит в обычный для него режим преобразования возникших механических колебаний в электрические. Начальная амплитуда сигнала пьезоэлемента равна q= d2KU, где K - жесткость пьезоэлемента. В обычном же режиме КП акселерометра (S) пропорционален произведению пьезомодуля на массу инерционного элемента (М). В рамках принятой модели механической системы акселерометра (см. , например, "Пьезоэлектрические акселерометры и предусилители. Справочник по теории и эксплуатации". Брюль и Къер, 1987) возможно, измерив q и определив частоту резонансных колебаний fp, найти связь этих параметров и, тем самым, решить поставленную задачу. Но на практике это оказывается невозможным по ряду причин. Действующая жесткость определяется не столько упругими свойствами пьезоэлемента, сколько жесткостью контактных соединений его с инерционным элементом и основанием, которая нелинейно зависит от силы поджатия их друг к другу. От этой же силы зависит, хотя и слабо, КП акселерометра. Статическое значение пьезомодуля, определяющее y и S, не равно значению, соответствующему частоте резонансных колебаний.
Модель также не учитывает двух явлений, несущественных для обычного режима работы акселерометра, а именно возникновения при замыкании колебаний с частотами выше частоты, определяемой K и M, и затухания колебаний вследствие рассеяния энергии. Поэтому поставленная цель достигается косвенным образом - сравнением значения сигнала q, определенного при неизвестности на данный момент времени значения КП, с аналогичным значением, но измеренным на интервале времени, в котором КП можно считать точно определенным, например, если поверка акселерометра, установка на объект и начальный цикл контроля следуют друг за другом. Такое сравнение основано на одинаковой по знаку зависимости параметров q и S от изменения d.
Учитывая затухание возбужденных колебаний и наличие переходных процессов в материале пьезоэлемента и реактивных элементах электрической схемы и вызываемое ими смещение среднего значения сигнала акселерометра от нулевого уровня, необходимо, во-первых, сопоставлять начальное и текущие значения сигнала в экстремумах с одинаковым порядковым номером от начала регистрации, а также использовать не экстремальное значение сигнала q, а его размах в полупериоде колебаний, т.е. (q+ - q-), см. фиг. 1.
Эксперименты показали, что форма возбужденных колебаний на начальном участке различна для акселерометров разных типов, что объясняется их конструктивными особенностями. Поэтому номер полупериода, в котором отсчет размаха сигнала будет более точным, оказывается также различным, что усложняет процесс контроля. По этой причине целесообразно выбрать в начальном цикле контроля интервал, включающий N полупериодов, и вычислить в нем сумму размахов в каждом из полупериодов, т.е.  Кроме того, учитывая квадратичную зависимость сигнала q от пьезомодуля, в целях уменьшения случайного разброса значений следует принять в качестве непосредственно контролируемой величины параметр
Кроме того, учитывая квадратичную зависимость сигнала q от пьезомодуля, в целях уменьшения случайного разброса значений следует принять в качестве непосредственно контролируемой величины параметр 
Использование современных средств обработки информации позволяет проводить контроль заявляемым способом автоматизированно.
Экспериментальная проверка способа проводилась на акселерометрах ряда типов (4369, 4370 и 4384 фирмы Брюль и Къер, ABC 034, ABC 117 и AHC 114 отечественного производства). Сигналы регистрировались цифровым осциллографом C9-8. При этом подтверждено, что используемый способ возбуждения резонансных колебаний обеспечивает их высокую стабильность. При одиннадцати циклах контроля без снятия акселерометра с имитатора объекта форма колебаний сохранялась полностью, а разброс значений параметра Q даже при N = 1..2 не превысил 1,5% для любого из испытанных акселерометров. Такой повторяемости реакции не давали другие известные способы импульсного воздействия на акселерометр.
Обнаружено также, что интенсивность возбужденных колебаний различна для разных экземпляров однотипных акселерометров. Это объясняется, скорее всего, влиянием микроскопических отличий поверхностей соприкасающихся деталей. Поэтому полученная запись является своего рода индивидуальной характеристикой акселерометра.
При эксперименте изменение параметров акселерометров достигалось изменением температуры среды, в результате чего КП изменился в 1,02...1,05 раза, а параметр Q - в 1,01...1,08 раз.
Отношение S1/S0: Q1/Q0 при этом находилось в пределах 0,95...1,05, что подтверждает целесообразность выбора параметра в качестве контролируемой величины.
Конкретное значение данного отношения также индивидуально и его желательно определить до установки опытным путем.
Практическое применение заявляемого способа целесообразно при измерении вибрации на длительно функционирующих роторных машинах (энергетических турбоагрегатах, компрессорных станциях и т.п.).
Источники информации
1. М.И. Субботин, Е.А. Желонкин, В.П. Филатов. О дистанционной проверке измерительных каналов с пьезодатчиками. - В сб.: Вибрационная техника. МДНТП им. Ф.Э. Дзержинского, 1986, с. 29.
2. В. В. Воробжанский. Установка для проверки пьезоэлектрических датчиков. "Приборы и системы управления", 1979, N 4, с.30 (прототип).
Изобретение может быть использовано при контроле параметров средств измерения вибрации. Для повышения точности измерения вибрации при длительной эксплуатации пьезоэлектрического акселерометра без возможности его демонтажа для поверки коэффициента преобразования в каждом цикле контроля возбуждают резонансные колебания акселерометра подключением его к источнику постоянного напряжения с последующими отключением и кратковременным замыканием его выводов и регистрируют их. Начальный цикл проводят сразу после установки акселерометра на объект измерений. В каждом цикле определяют значение параметра Q по размаху сигнала акселерометра в каждом полупериоде колебаний, а значение коэффициента преобразования Sn в n-м цикле определяют по математической формуле, в которую входит значение параметра Q и начальное значение коэффициента преобразования, определенное прямой поверкой. 1 ил.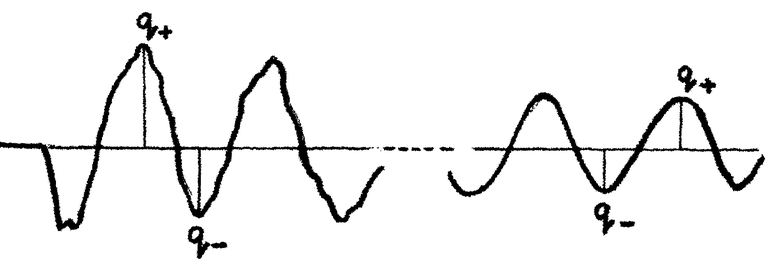
Способ дистанционного периодического контроля коэффициента преобразования пьезоэлектрического акселерометра путем электрического возбуждения его резонансных колебаний, их регистрации и анализа, отличающийся тем, что в каждом цикле контроля возбуждение колебаний осуществляют путем подключения акселерометра к источнику постоянного напряжения с последующими отключением и кратковременным замыканием выводов акселерометра, начальный цикл контроля проводят сразу после установки акселерометра на объект измерения, в каждом цикле контроля вычисляют значение параметра
где (q+ - q-)i - размах сигнала акселерометра в i-м полупериоде колебаний;
N - число учтенных полупериодов, выбранное в начальном цикле,
а значение коэффициента преобразования Sn в n-м цикле определяют по формуле
где S0 - начальное значение коэффициента преобразования, определенное прямой поверкой;
Qn и Q0 - значения параметра Q в n-м и начальном циклах соответственно.
| Воробжанский В.В | |||
| Установка для проверки пьезоэлектрических датчиков | |||
| - Приборы и системы управления, 1979, N 4, с.30 | |||
| Способ определения коэффициента преобразования акселерометра | 1983 |
|
SU1137400A1 |
| Градуировочное устройство пьезодатчика ускорений | 1986 |
|
SU1553909A1 |
| Прибор для обтягивания товарных кип и ящиков железом | 1924 |
|
SU2150A1 |

