Изобретение относится к корабельным загрузочным устройствам и может быть использовано для безударной вертикальной погрузки на корабль длинномерного груза с помощью универсальных грузоподъемных средств при волнении моря.
Известны ракетозагрузочные устройства, обеспечивающие безударную загрузку ракет на корабль при волнении моря (Юрий Иванов, Вячеслав Красильников, Борис Бураков // Корабельные ракетозагрузочные устройства // Военный парад. - ноябрь-декабрь 1996 г. - с. 90-92). В том числе известны устройства, обеспечивающие загрузку ракет, которые с момента изготовления до пуска с корабля находятся в транспортно-пусковом контейнере (ТПК), который обеспечивает не только погрузку ракеты на корабль, но и ее пуск. Известные устройства снабжены воронкообразными ловителями и шаровыми опорами, размещаемыми и смонтированными либо на палубе принимающего корабля, либо на элементах передаваемого на корабль груза. Подобные устройства обеспечивают улавливание качающегося груза и его точную фиксацию на корабле относительно пусковой установки. (ПУ), в которую должна загружаться ракета (ТПК). Для снижения перегрузок, возникающих при соударениях качающегося корабля и передаваемого груза, опоры загрузочных устройств снабжаются вертикальными и горизонтальными амортизаторами. Кроме того, в подвеске, входящей в состав ракетозагрузочного устройства, соединяющей груз с гаком грузоподъемного средства, также встроен амортизационный узел, который снижает перегрузку на ракету при отрыве груза от корабля, когда его палуба при качке уходит вниз от груза быстрее, чем опускается груз, и последний резко зависает, что приводит к возникновению перегрузок. Амортизаторы опор и подвески рассчитываются исходя из скоростей взаимного перемещения палубы корабля и груза при заданном волнении моря для данного корабля или группы кораблей и допустимых для ракеты перегрузок в вертикальном и горизонтальном направлениях.
Однако указанные ракетозагрузочные устройства не предполагают обеспечения загрузки ракет (ТПК) в ПУ, смонтированные вертикально.
Наиболее близким по совокупности существенных признаков с заявляемым изобретением является корабельное устройство для загрузки-выгрузки ракет в пусковые установки надводных кораблей по п. RU N 2121449 (МПК6 B 63 G 3/04, F 41 F 3/04, 1998 г.). Известное устройство содержит палубные воронкообразные ловители, загрузочную ферму с направляющими дорожками и подвеску с амортизатором. Загрузочная ферма представляет собой сварную конструкцию, на которой закреплены амортизационные опоры, предназначенные для фиксации загрузочной фермы в воронкообразных ловителях перед пусковой установкой и для снижения до допустимой величины вертикальных и горизонтальных перегрузок, действующих на ракету, с помощью смонтированных в опорах амортизаторов. Подвеска выполнена в виде рамы со стойками, взаимодействующими с воронкообразными улавливателями (опорами-ловителями), смонтированными на загрузочной ферме, и снабжена промежуточной балкой с шарнирно установленными рамами для присоединения ее к такелажным узлам ракеты и механизмом (приводом) вертикального перемещения ракеты, взаимодействующим с промежуточной балкой. С помощью подвески, прикрепленной за скобу (серьгу) амортизатора к крюку грузоподъемного средства, осуществляется раздельная установка на корабль загрузочной фермы и ракеты на загрузочную ферму с последующей загрузкой ракеты в пусковую установку с помощью механизмов (приводов) загрузочного устройства. Вместе с этим известное устройство позволяет также производить и совместную установку на корабль загрузочной фермы и ракеты. В этом случае ракета с помощью прикрепленной к крюку грузоподъемного средства подвески укладывается на загрузочную ферму, установленную на пирсе на тележке, и после присоединения стоек подвески к воронкообразным улавливателям (опорам-ловителям) загрузочной фермы последняя совместно с ракетой переносится на корабль и устанавливается в воронкообразные ловители перед пусковой установкой.
Однако известное устройство не предполагает обеспечения загрузки-выгрузки ракеты (ТПК) в ПУ, которая смонтирована вертикально.
Задача, решаемая изобретением, заключается в создании устройства, обеспечивающего безударную вертикальную загрузку длинномерного объекта на корабль при волнении моря с помощью обычных грузоподъемных средств со стационарных и плавучих причалов.
Указанная задача решается тем, что в устройстве для загрузки транспортно-пускового контейнера в пусковую установку корабля, содержащем палубные ловители, амортизационные опоры, подвеску с амортизатором, причем подвеска выполнена в виде рамы со стойками, взаимодействующими с опорами-ловителями, и снабжена промежуточной балкой и шарнирно установленной второй рамой для присоединения подвески к транспортно-пусковому контейнеру, а также приводом вертикального перемещения последнего, взаимодействующим с промежуточной балкой, согласно изобретению амортизатор пропущен через отверстие в раме подвески, при этом корпус амортизатора установлен с возможностью вертикального перемещения в направляющей последней. На нижнем торце корпуса амортизатора закреплена промежуточная балка, через отверстие в которой пропущен шток амортизатора, соединенный через шарнирный механизм со второй рамой. Между последней и промежуточной балкой установлено устройство фиксации заданного взаимного положения. Каждая из амортизационных опор закреплена на соответствующей стойке рамы подвески с возможностью взаимодействия с опорой-ловителем. Палубные ловители выполнены съемными с возможностью установки в фиксируемом положении по окружности относительно ячейки пусковой установки. Каждый палубный ловитель представляет собой стойку, на которой закреплена наклонно расположенная упругая направляющая с возможностью взаимодействия с транспортно-пусковым контейнером при загрузке последнего в ячейку пусковой установки. При этом каждая из опор-ловителей смонтирована на стойке соответствующего палубного ловителя.
Вместе с этим амортизационные опоры расположены по окружности относительно оси подвески в двух взаимно перпендикулярных плоскостях, при этом каждая амортизационная опора имеет самоустанавливающийся подпятник с опорной поверхностью, выполненной с возможностью взаимодействия с опорной поверхностью опоры-ловителя. Самоустанавливающиеся подпятники двух диаметрально расположенных опор имеют направляющие элементы, выполненные с возможностью взаимодействия с ответными элементами, выполненными на опорах-ловителях.
Направляющая палубного ловителя имеет H-образную форму и закреплена на стойке последнего своим поперечным формообразующим элементом.
Кроме того, привод вертикального перемещения выполнен в виде смонтированного на раме подвески гидравлического привода, включающего гидроцилиндры, корпуса которых закреплены на раме подвески, а штоки шарнирно соединены с промежуточной балкой.
Технический результат использования изобретения состоит в том, что оно обеспечивает возможность вертикальной загрузки длинномерного объекта на корабль с обеспечением снижения перегрузок, действующих на загружаемый объект в процессе загрузки, например, при волнении моря. Вместе с этим изобретение обеспечивает приспособляемость устройства для загрузки для проведения на пирсе операции кантования загружаемого объекта, что расширяет эксплуатационные возможности устройства. Кроме того, изобретение обеспечивает возможность безударной установки загружаемого объекта на штатное место на корабле, а также позволяет упростить процесс загрузки благодаря обеспечению возможности самоустановки устройства совместно с загружаемым объектом в заданное положение относительно диаметральной плоскости (ДП) корабля.
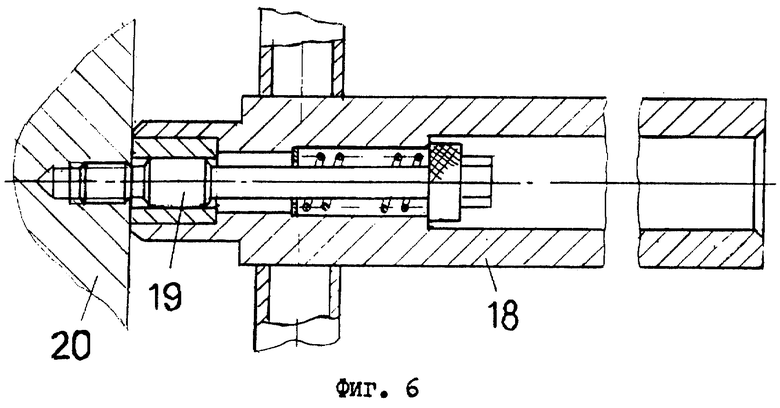
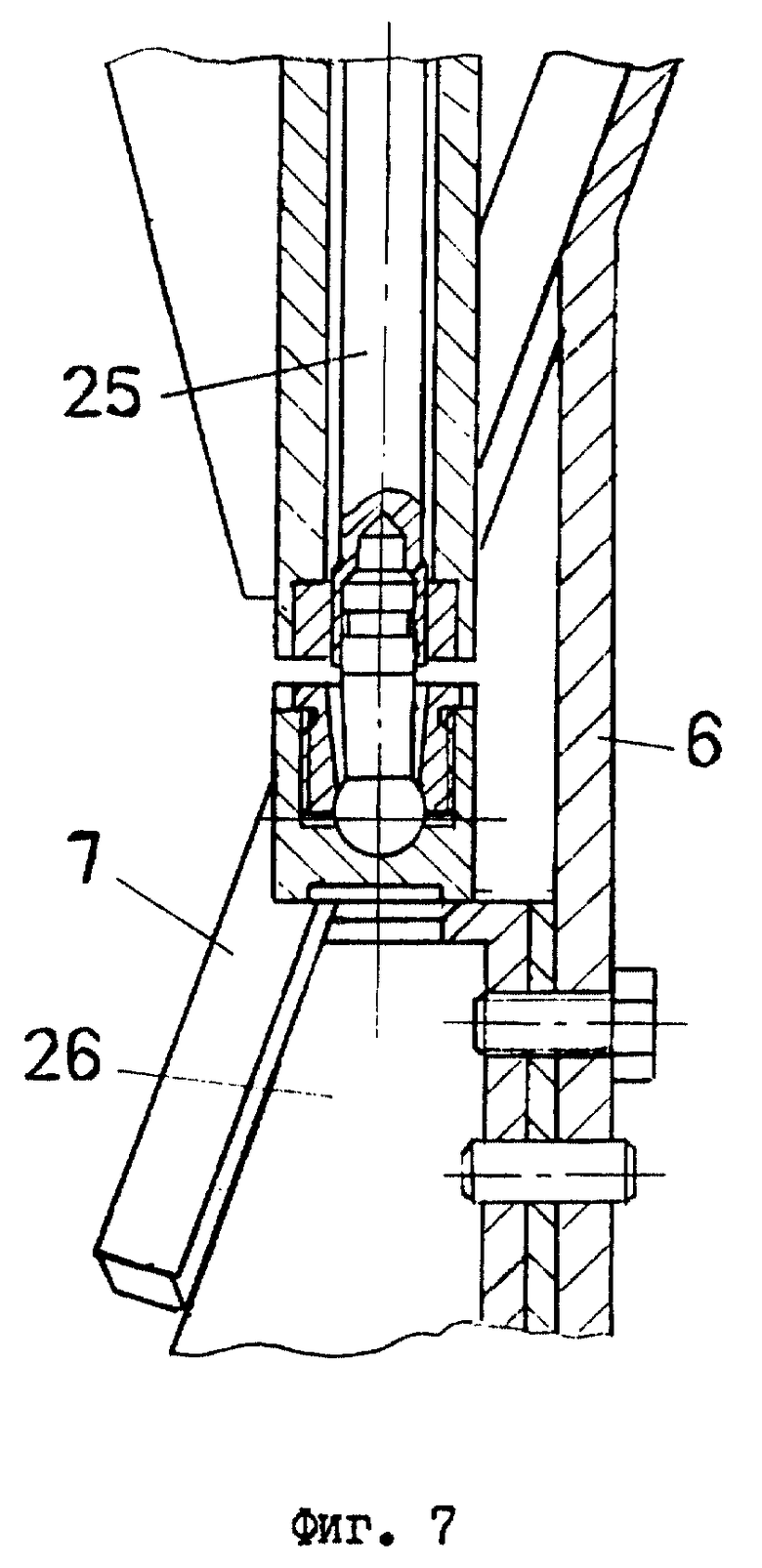
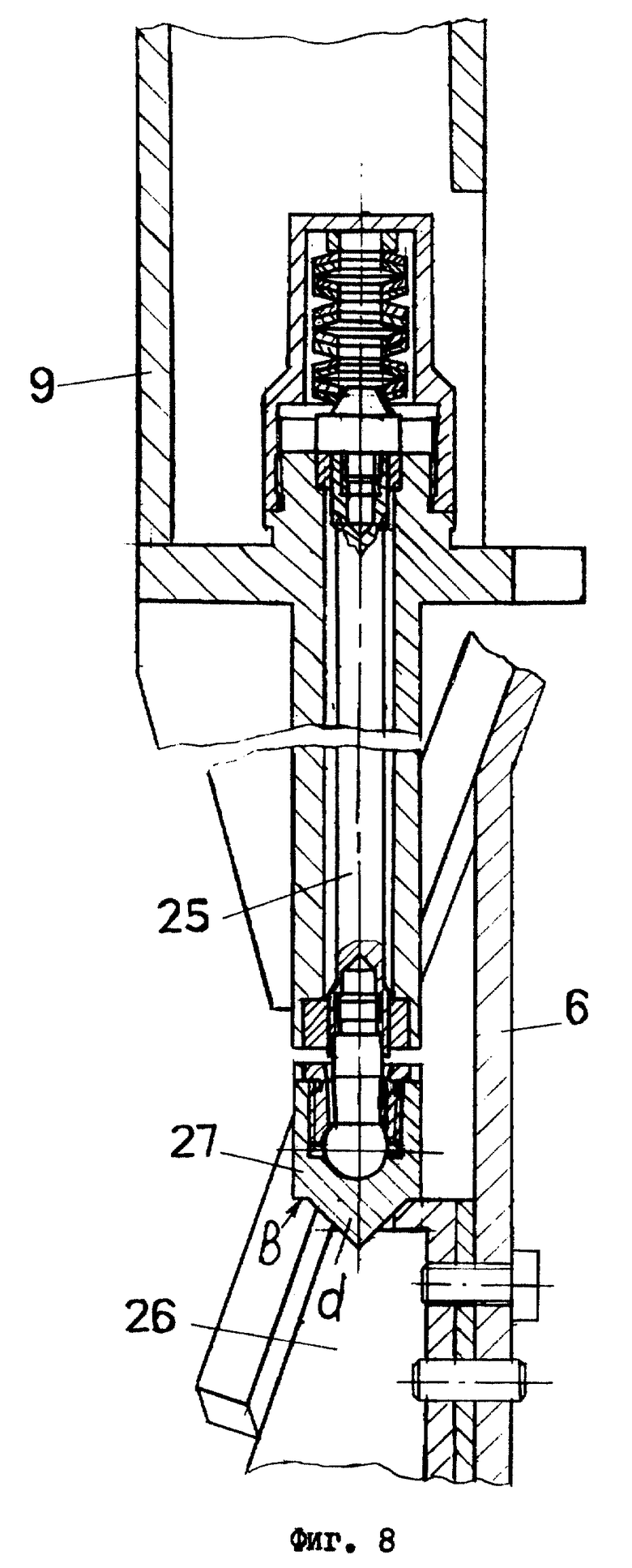
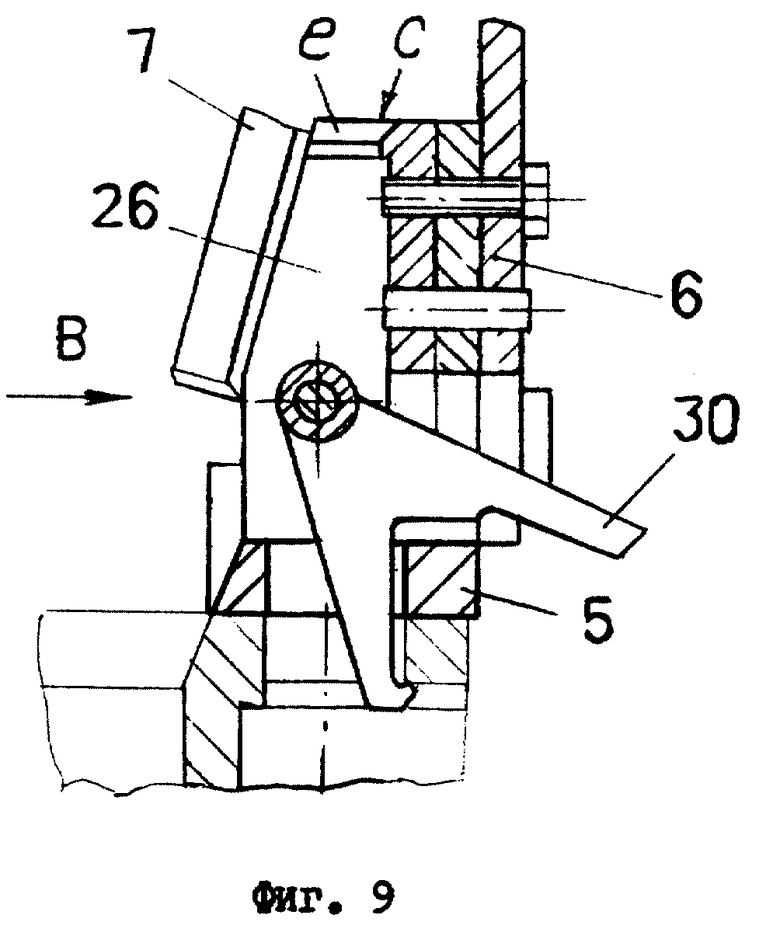
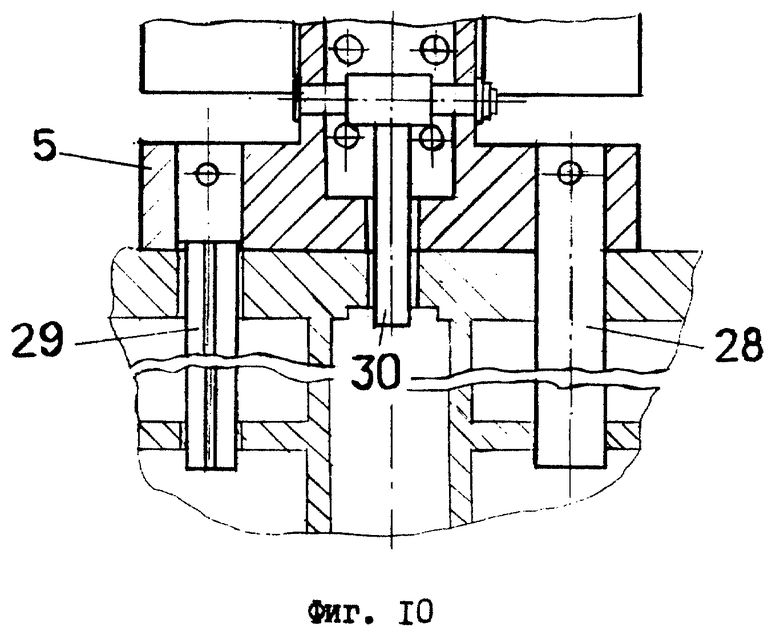
На фиг. 1 схематически показано предлагаемое устройство для загрузки ТПК в ПУ корабля в момент установки ТПК на штатное место на корабле, общий вид, продольный разрез; на фиг. 2 - предлагаемое устройство с устройством для кантования перед подъемом ТПК в вертикальное положение, общий вид; на фиг. 3 - съемные палубные ловители и ТПК, вывешенный над загружаемой ячейкой ПУ, продольный разрез по оси ячейки; на фиг. 4 - устройство крепления амортизатора на раме подвески, продольный разрез; на фиг. 5 - рама для присоединения подвески к ТПК и элементы устройства фиксации упомянутой рамы и промежуточной балки, разрез по А-А на фиг. 4; на фиг. 6 - устройство узла крепления подвески к загружаемому объекту, разрез по Б-Б на фиг. 5; на фиг. 7 - амортизационная опора с самоустанавливающимся подпятником, установленная на опоре-ловителе, продольный разрез; на фиг. 8 - то же, когда самоустанавливающийся подпятник выполнен с направляющим элементом в виде конусного выступа; на фиг. 9 - устройство крепления съемного палубного ловителя; на фиг. 10 - то же, вид В на фиг. 9.
В варианте осуществления изобретения устройство служит для загрузки транспортно-пускового контейнера 1 в пусковую установку 2 корабля. Устройство включает подвеску 3 с амортизатором 4 двустороннего действия и палубные ловители 5. Палубные ловители 5 выполнены съемными с возможностью установки в фиксируемом положении по окружности относительно оси ячейки ПУ 2. Палубный ловитель 5 представляет собой стойку 6 с упругой верхней частью, на которой закреплена наклонно расположенная упругая направляющая 7 с возможностью взаимодействия с ТПК 1 при загрузке последнего в ячейку ПУ. В варианте выполнения направляющая 7 съемного палубного ловителя 5 имеет Н-образную форму и закреплена на стойке 6 своим поперечным формообразующим элементом "а". Наклонно установленные упругие направляющие 7 съемных палубных ловителей 5 вместе образуют "направляющий конус", обеспечивающий при загрузке ТПК приведение продольной оси последнего к продольной оси ячейки ПУ, т.е. центрирование ТПК относительно ячейки ПУ. Кроме того, упругие направляющие 7 съемных палубных ловителей 5 совместно с упругими верхними частями стоек 6 обеспечивают при загрузке снижение ударных нагрузок на ТПК в условиях внешних воздействий, например, ветровых нагрузок, волнения моря.
Подвеска 3 выполнена в виде рамы 8 со стойками 9. Корпус 10 амортизатора 4 пропущен через отверстие в раме 8 подвески и установлен с возможностью вертикального перемещения в направляющих 11 рамы подвески. На верхнем торце корпуса амортизатора 4 шарнирно закреплена серьга 12, взаимодействующая с гаком 13 грузоподъемного средства (на чертеже не показано). На нижнем торце корпуса амортизатора закреплена промежуточная балка 14, через отверстие в которой пропущен шток 15 амортизатора 4, соединенный через шарнирный механизм 16 со второй рамой 17 для присоединения подвески к ТПК. В варианте осуществления изобретения рама 17 представляет собой крестообразную сварную металлоконструкцию с четырьмя стойками 18, в которых установлены невыпадающие подпружиненные болты 19 для соединения рамы 17 с ТПК. В варианте осуществления рама 17 соединяется с ТПК посредством устанавливаемого на корпусе последнего переходника 20. Подвеска 3 снабжена приводом 21 вертикального перемещения ТПК 1, взаимодействующим с промежуточной балкой 14. В варианте выполнения привод 21 выполнен в виде смонтированного на раме 8 подвески 3 гидравлического привода, включающего гидроцилиндры 22, корпуса которых закреплены на раме 8 подвески, а штоки 23 шарнирно соединены с промежуточной балкой 14. Между рамой 17 и промежуточной балкой 14 установлено устройство фиксации 24 заданного взаимного положения. Устройство фиксации 24 обеспечивает заданное положение рамы 17 относительно промежуточной балки 14 при стыковке последней с ТПК, находящимся в горизонтальном положении.
Устройство содержит амортизационные опоры 25, каждая из которых закреплена на соответствующей стойке 9 рамы 8 подвески с возможностью взаимодействия с опорами-ловителями 26. Каждая из последних смонтирована на стойке 6 соответствующего съемного палубного ловителя 5. В варианте выполнения изобретения подвеска 3 выполнена в виде рамы, имеющей четыре стойки с амортизационными опорами 25, при этом амортизационные опоры расположены по окружности относительно продольной оси подвески в двух взаимно перпендикулярных плоскостях. Каждая амортизационная опора имеет самоустанавливающийся подпятник 27 с опорной поверхностью "B", выполненной с возможностью взаимодействия с опорной поверхностью "C" опоры-ловителя 26. Самоустанавливающиеся подпятники 27 двух диаметрально расположенных амортизационных опор 25 имеют направляющие элементы, выполненные с возможностью взаимодействия с ответными элементами, выполненными на опорах-ловителях 26. В варианте осуществления изобретения упомянутые направляющие элементы выполнены, например, в виде конусных выступов "d", а ответные элементы опор-ловителей выполнены в виде гнезд "e" с конической опорной поверхностью. Все опоры-ловители выполнены одинаковыми, т. е. любая из них может быть сопряжена с амортизационной опорой, самоустанавливающийcя подпятник который имеет направляющий элемент в виде конусного выступа.
В варианте осуществления съемный палубный ловитель 5 имеет цилиндрический и ромбический пальцы 28, 29 и подпружиненный подхват 30. Пальцы 28 и 29 обеспечивают установку съемного палубного ловителя в штатные гнезда на палубе корабля или, например, в гнезда на соответствующей подставке при хранении или транспортировке съемного палубного ловителя. Подпружиненный подхват 30 шарнирно установлен на стойке 6 и обеспечивает фиксацию съемного палубного ловителя при установке последнего на штатное место. Подобная конструкция съемного палубного ловителя обеспечивает взаимозаменяемость палубных ловителей, что упрощает обслуживание устройства загрузки. Съемные палубные ловители располагаются на палубе корабля таким образом, что смонтированные на них опоры-ловители 26 совместно с подвеской 3 обеспечивают при загрузке ТПК в ячейку ПУ заданную ориентацию ТПК относительно диаметральной плоскости корабля.
В варианте осуществления изобретения для кантования ТПК перед загрузкой последнего в ячейку ПУ используют устройство кантования, включающее раму 31 со съемным ложементом 32. Рама 31 выполнена с направляющими, в которых с возможностью перемещения установлена каретка 33 с подцапфенниками 34, взаимодействующая с цапфами 35 устанавливаемого на ТПК съемного кольца 36. В варианте осуществления изобретения последнее выполнено разъемным.
Устройство для загрузки ТПК в ПУ корабля работает следующим образом.
ТПК и составные части устройства для загрузки доставляются к месту проведения работ. Предварительно ТПК 1 снаряжают переходником 20 и съемным кольцом 36. ТПК устанавливают на съемном ложементе 32 и каретке 33 рамы 31 устройства кантования. Производят строповку ТПК (на чертеже не показано). После этого устройство для загрузки ТПК состыковавается с переходником 20. Перед проведением стыковки серьга 12 соединяется с гаком грузоподъемного средства. Раму 17 с помощью шарнирного механизма 16 поворачивают таким образом, чтобы ее продольная ось располагалась под прямым углом к продольной оси подвески 3, т.е. горизонтально. Это положение рамы 17 фиксируют с помощью устройства фиксации 24. Раму 17 через стойки 18 посредством болтов 19 соединяют с закрепленным на ТПК переходником 20. Затем раму 17 освобождают от фиксации, для чего отключают устройство фиксации 24. С помощью грузоподъемного средства ТПК переводят в вертикальное положение. В процессе подъема соответствующего конца ТПК благодаря шарнирному механизму 16 продольная ось рамы 17 геометрически совмещается с продольной (вертикальной) осью подвески 3, совпадающей с продольной осью амортизатора 4. Одновременно каретка 33, связанная с другим концом ТПК, перемещается по направляющим рамы 31, при этом ТПК с помощью цапф 35 съемного кольца 36 поворачивается в подцапфенниках 34 каретки 33. После кантования ТПК съемное кольцо 36 отсоединяют. При этом ТПК удерживается от раскачивания с помощью строп.
Съемные палубные ловители 5 устанавливаются в штатные гнезда на палубе корабля по окружности относительно оси загружаемой ячейки ПУ и фиксируются с помощью подпружиненных подхватов 30.
ТПК с помощью грузоподъемного средства перемещают к загружаемой ячейке ПУ 2 и вывешивают на заданной высоте над проемом загружаемой ячейки соосно последней, обеспечивая предварительную ориентацию в горизонтальной плоскости. Осуществляют опускание ТПК в проем ячейки ПУ до контакта самоустанавливающихся подпятников 27 амортизационных опор 25 с опорами-ловителями 26. При опускании ТПК, когда нижний конец последнего опустится, например, на 200 - 300 мм ниже опорных поверхностей опор-ловителей, от ТПК отсоединяют стропы. В процессе загрузки ТПК в ячейку ПУ наклонно установленные направляющие 7 съемных палубных ловителей 5, образующие "направляющий конус", обеспечивают центрирование ТПК относительно ячейки ПУ. Благодаря особенности конструкции съемных палубных ловителей в процессе загрузки при взаимодействии с ними корпуса ТПК не происходит жесткого удара. Податливость палубного ловителя обеспечивается за счет изгиба элементов упругой H-образной направляющей 7 и упругой верхней части стойки 6. Таким образом, упругие направляющие 7 совместно с упругими верхними частями стоек 6 съемных палубных ловителей 5 и амортизатором 4 обеспечивают при загрузке ТПК в ПУ корабля снижение перегрузок действующих на ТПК в условиях внешних воздействий, например, ветровых нагрузок, волнения моря.
В результате установки амортизационных опор 25 стоек подвески в опоры-ловители 26 обеспечивается заданная ориентация ТПК относительно диаметральной плоскости корабля. Освобождают грузоподъемное средство, при этом гак 13 отсоединяют от серьги 12, шарнирно закрепленной на верхнем торце корпуса амортизатора 4. После освобождения грузоподъемного средства снижение действующих на ТПК перегрузок до допустимых значений обеспечивается благодаря работе амортизатора 4 и амортизационных опор 25 стоек рамы подвески. С помощью гидроцилиндров 22 привода 21 вертикального перемещения ТПК последний безударно устанавливают на штатное место. Вертикальное перемещение ТПК обеспечивается с помощью направляющих 11 рамы подвески 3, взаимодействующих с корпусом 10 амортизатора 4, связанного через промежуточную балку 14 со штоками 23 гидроцилиндров 22. Гидравлический привод позволяет осуществлять медленное контролируемое опускание ТПК.
В варианте осуществления изобретения после установки ТПК на штатное место от ТПК отсоединяют переходник 20. Серьгу 12 вновь соединяют с гаком грузоподъемного средства, после чего переходник 20 совместно с подвеской 3 удаляют от ячейки ПУ.
Выгрузку ТПК из ячейки ПУ осуществляют в обратной последовательности. При этом гидроцилиндры 22 могут быть использованы для преодоления трения покоя при страгивании ТПК с места в начале подъема.
Таким образом, благодаря особенности выполнения устройства для загрузки ТПК в ПУ корабля изобретение обеспечивает возможность вертикальной загрузки длинномерного объекта с обеспечением снижения перегрузок, действующих на загружаемый объект в процессе загрузки в условиях внешнего воздействия, например, ветровых нагрузок, волнения моря. Вместе с этим изобретение обеспечивает приспособляемость устройства для загрузки для проведения на пирсе операции кантования загружаемого объекта, что расширяет эксплуатационные возможности устройства. Кроме того, изобретение обеспечивает возможность безударной установки загружаемого объекта на штатное место. Также изобретение позволяет упростить процесс загрузки благодаря обеспечению возможности самоустановки устройства совместно с загружаемым объектом в заданное положение относительно ДП корабля.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА В МНОГОМЕСТНУЮ ШАХТНУЮ ПУСКОВУЮ УСТАНОВКУ КОРАБЛЯ | 2008 |
|
RU2375248C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА В ПУСКОВУЮ УСТАНОВКУ КОРАБЛЯ | 2003 |
|
RU2240258C2 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ТРАНСПОРТНО-ПУСКОВЫХ КОНТЕЙНЕРОВ ПРЕИМУЩЕСТВЕННО ДЛЯ ОРУЖИЯ ТИПА ТОРПЕДЫ НА ПУСКОВУЮ УСТАНОВКУ КОРАБЛЯ | 2007 |
|
RU2337854C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ПРЕИМУЩЕСТВЕННО ТРАНСПОРТНО-ПУСКОВЫХ КОНТЕЙНЕРОВ НА ПУСКОВУЮ УСТАНОВКУ КОРАБЛЯ | 2012 |
|
RU2489307C1 |
| КОРАБЕЛЬНОЕ РАКЕТОЗАГРУЗОЧНОЕ УСТРОЙСТВО | 1997 |
|
RU2121449C1 |
| ПУСКОВАЯ УСТАНОВКА | 1997 |
|
RU2117232C1 |
| МОДУЛЬНАЯ МНОГОМЕСТНАЯ КОРАБЕЛЬНАЯ ПУСКОВАЯ УСТАНОВКА ВЕРТИКАЛЬНОГО ПУСКА | 2002 |
|
RU2213925C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА В ПУСКОВУЮ УСТАНОВКУ КОРАБЛЯ | 2007 |
|
RU2334649C1 |
| МОДУЛЬНАЯ МНОГОМЕСТНАЯ КОРАБЕЛЬНАЯ ПУСКОВАЯ УСТАНОВКА ВЕРТИКАЛЬНОГО ПУСКА | 2002 |
|
RU2213924C1 |
| МНОГОМЕСТНАЯ КОРАБЕЛЬНАЯ ПУСКОВАЯ УСТАНОВКА ДЛЯ РАКЕТ | 2004 |
|
RU2270969C1 |
Изобретение относится к корабельным загрузочным устройствам, в частности к устройствам для загрузки транспортно-пускового контейнера в пусковую установку корабля. Устройство включает подвеску с амортизатором двустороннего действия и палубные ловители. Палубные ловители выполнены съемными с возможностью установки на корабле в фиксируемом положении по окружности относительно ячейки пусковой установки. Каждый палубный ловитель представляет собой стойку с упругой верхней частью, на которой закреплена наклонно расположенная упругая направляющая. Подвеска выполнена в виде рамы со стойками. На стойках подвески соответственно закреплены амортизационные опоры с возможностью взаимодействия с опорами-ловителями, смонтированными на стойках палубных ловителей. Корпус амортизатора пропущен через отверстие в раме подвески. На нижнем торце корпуса амортизатора закреплена промежуточная балка, через отверстие в которой пропущен шток амортизатора, соединенный через шарнирный механизм со второй рамой. Подвеска снабжена гидравлическим приводом вертикального перемещения транспортно-пускового контейнера, взаимодействующим с промежуточной балкой. Достигается безударная вертикальная загрузка длинномерного объекта на корабль при волнении моря. 3 з.п. ф-лы, 10 ил.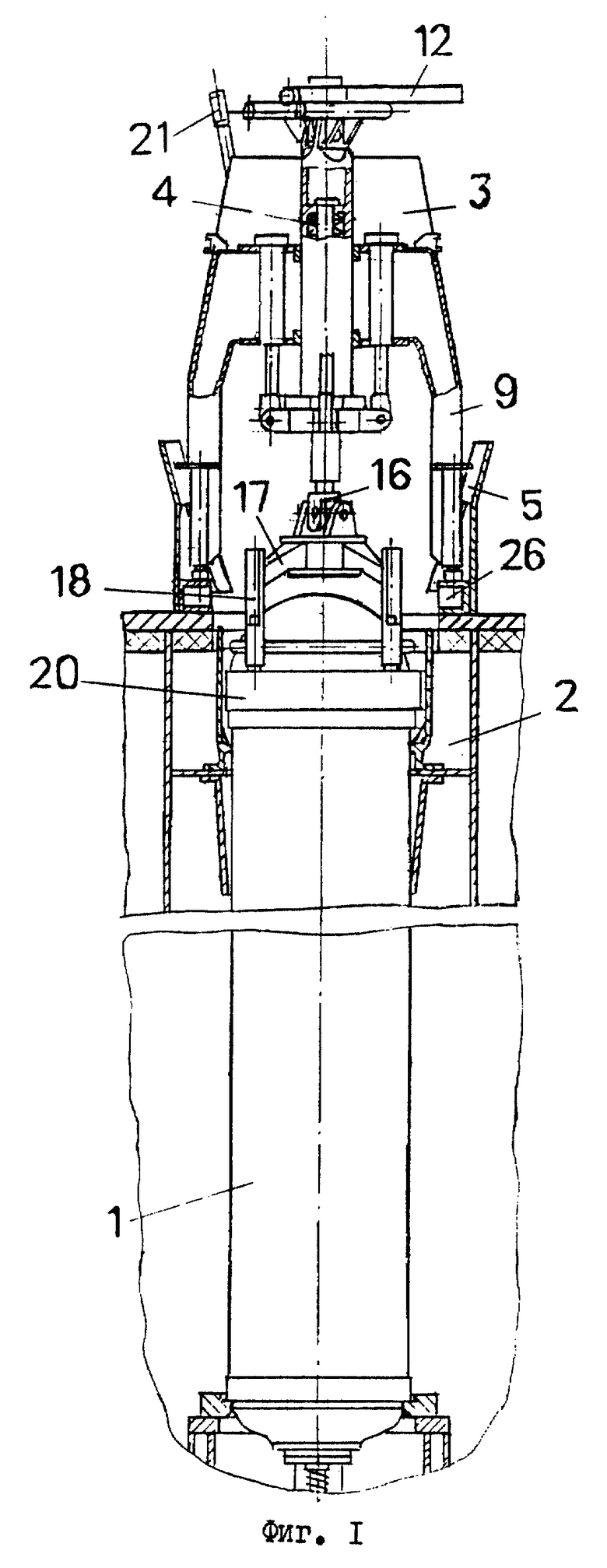
| КОРАБЕЛЬНОЕ РАКЕТОЗАГРУЗОЧНОЕ УСТРОЙСТВО | 1997 |
|
RU2121449C1 |
| US 3459102 A, 13.11.1967 | |||
| Ю.Иванов и др | |||
| Корабельные ракетопогрузочные устройства, Военный парад ноябрь-декабрь, 1996, с | |||
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| DE 2002398 А, 26.10.1972. | |||

