Изобретение относится к судостроительному машиностроению.
Известны конструкции подводных аппаратов, основанных на использовании принципа работы колокола Маккена, как привязные, так и самоперемещающиеся, которые снабжены узлом выхода водолазов в водную среду и стыковки с затонувшим объектом, при этом находящиеся в них водолазы, используя гелиево-кислородную дыхательную смесь, могут выходить для выполнения разнообразных подводных работ, например, по книге В.А. Вишнякова и И.В Меринова "Глубоководная водолазная техника". Судостроение, 1982.
Известны разнообразные конструкции понтонов и приемы манипулирования с ними при различных способах подъема затонувших судов, например, по книге В. А. Молчанова "Возвращение из глубин". Судостроение, 1982.
Наиболее близким аналогом к заявляемому устройству, принятым автором за прототип, является устройство по патенту России 2111890, B 63 C 7/00, снабженное подруливающим устройством для пространственного маневрирования и раскачивания объекта перед подъемом с грунта, системой удифферентовки, включающей в себя емкости в оконечностях устройства и насос, подключенный к системе размыва грунта с помощью гидрошлангов, сочлененных с захватами, а также снабжено средствами управления, включающими в себя датчики и приборы измерения дистанции до объекта в условиях ограниченной видимости, при этом подруливающая система выполнена с попарно установленными по бортам и в оконечностях устройства движителями, колонки которых выполнены поворотными в продольной плоскости.
Недостатком прототипа является то, что скобы захвата, смыкающиеся с помощью гидроцилиндров с недостаточной силой и надежностью удерживают спасаемое судно во время судоподъемных работ.
Цель - повышение надежности и ускорение подводно-спасательных работ.
Возможность достижения цели обеспечивается тем, что аппарат имеет дополнительные понтоны, связанные канатом со скобами клещевого захвата, причем аппарат имеет зажимы каната, закрепленные на раме, при этом скобы клещевых захватов имеют гибкие канатные подвески, скрепляющие их с рамой и определяющие величину раскрытия скоб клещевых захватов;
при этом аппарат отличается тем, что гибкие канатные подвески имеют оголовки с чеками для их скрепления с рамой.
На фиг. 1 - схематическое изображение аппарата, величина раскрытия скоб клещевых захватов которого фиксирована с помощью вспомогательных подвесок.
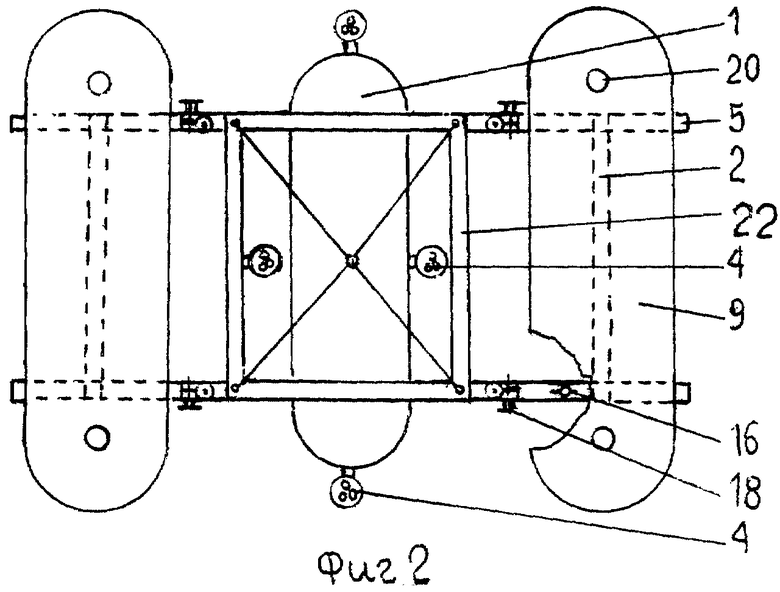
На фиг. 2 - то же, вид аппарата сверху в разрезе по А-А на фиг. 1.
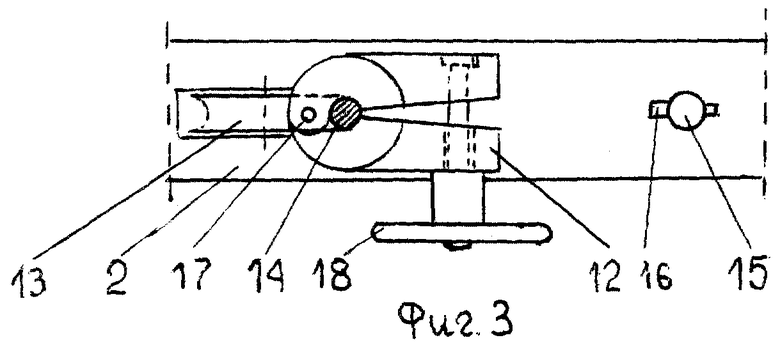
На фиг. 3 - пример выполнения зажимов каната и оголовка с чекой.
Подводный аппарат для захвата и подъема затонувших объектов имеет корпус 1 с энергетическим и технологическим оборудованием, закрепленный на раме 2, соединенной силовым канатом 3 с надводным судном /не показано/, подруливающую систему с движителями 4, колонки которых выполнены поворотными в продольной плоскости, что позволяет пространственное маневрирование аппарата, клещевой захват со скобами 5, имеющими на концах сопла 6 для размыва грунта, питаемые через гидрошланги 7, пневмошланг и кабель 8 для снабжения корпуса 1 электроэнергией и воздухом, понтоны 9, дополнительные понтоны 10, связанные канатом 11 со скобами 5 клещевого захвата, причем канаты 11 проходят через отверстия в зажимах 12 и вспомогательные направляющие блоки 13, закрепленные на раме 2, при этом скобы 5 клещевых захватов имеют гибкие канатные подвески 14, скрепляющие скобы с рамой 2 и определяющие величину раскрытия скоб клещевых захватов, причем гибкие подвески имеют оголовки 15 с чеками 16, высвобождающими подвески от скрепления с рамой 2. Половины захвата 12, скрепленные осью 17, стягиваются штурвалом 18. Все понтоны соединены с корпусом 1 пневмошлангами 19, через которые ведется заполнение понтонов воздухом, и клапаны 20. Канаты 11 с понтонами 10 скреплены через соединительные планки 21. Рама 2 скреплена с канатом 3 через вспомогательную раму 22. Для выхода водолазов корпус 1 имеет тубус 23.
Устройство работает следующим образом. Поясним это на примере поднятия предмета цилиндрической формы, например затонувшей торпеды или объекта большего диаметра. К месту обнаружения затонувшего объекта направляют надводное судно, способное нести и обслуживать аппарат. В зависимости от срочности предстоящего подъема и конкретных местных условий, решают вопрос о способе удержания судна над объектом, при этом, в целях сокращения подъемно-спасательных работ преимущество отдают динамическим способам удержания судна над объектом. Лебедкой надводного судна аппарат опускают вниз, предварительно придав ему небольшую отрицательную плавучесть и сделав длину подвесок 14 такой, чтобы расстояние между концами скоб несколько превышало ширину поднимаемого объекта. Используя подруливающее устройство, панорамные гидролокаторы и весь спектр телевизионно-осветительной техники, подводят аппарат к объекту, ориентируют клещевой захват и с помощью своих движителей 4 удерживают аппарат над объектом до тех пор, пока, ориентируясь телефонными командами экипажа аппарата, лебедки надводного судна потравят силовой канат, что позволит аппарату, повернув винты движителей 4 вниз, поставить концы клещевых захватов по бокам поднимаемого объекта. В простейшем случае, если грунт дна таков, что объект не завяз глубоко в ил и не имеет большого дифферента, заполнением балластной водой понтонов 9 вдавливают концы скоб клещевого захвата в ил, извлекают чеки 16, а затем, сначала продувкой понтонов 10 пытаются свести скобы 5 захвата, концы которых сближаясь не упираются друг в друга, а схлопываются до тех пор, показ захватываемый объект не окажется надежно стиснут подъемной силой продуваемых понтонов 10. Надежный захват позволяет пытаться преодолеть присос грунта с использованием понтонов 9, 10 и каната 3, следить за показаниями дифферентометра и поднимать объект, комбинируя подъемную силу понтонов и силу лебедки надводного судна. При приближении понтонов 10 к поверхности подъем приостанавливают и аквалангисты или водолазы в легководолазных костюмах, штурвалами 18 защемляют канаты 11, после чего понтоны 10 и аппарат могут быть подняты над поверхностью, а объект - либо поднят, либо в погруженном состоянии оттранспортирован в док.
В более сложных случаях - наличие большого дифферента, большое погружение в ил и т.п. используют весь арсенал средств и приемов, известных из опыта поднятия затонувших объектов: надводное судно стабилизируют канатами, выполняют размыв грунта из сопел 6, раскачивают объект перед его подъемом. Сомкнутые скобы 5, для страховки, водолазами могут быть соединены дополнительным канатом.
Положительный эффект устройства заключается в следующем:
- дополнительные понтоны 10 способны обеспечить большую силу захвата и большую дополнительную силу подъема;
- при соответствующей конструкции понтонов 9, 10, которые могут быть идентичными и могут выдерживать большое давление воды, устройство может работать на значительных глубинах, которые достижимы для водолазов, использующих гелиево-воздушную смесь.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ СУДОВ | 2000 |
|
RU2205769C2 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ОБЪЕКТОВ | 2002 |
|
RU2240255C2 |
| КОМПЛЕКС ПРЕИМУЩЕСТВЕННО ДЛЯ ПОДНЯТИЯ ЗАТОНУВШИХ ОБЪЕКТОВ | 2003 |
|
RU2240256C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2016 |
|
RU2613181C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕЙ ПОДВОДНОЙ ЛОДКИ | 2002 |
|
RU2222467C2 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2009 |
|
RU2390460C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 1995 |
|
RU2111890C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА | 1990 |
|
RU2025403C1 |
| СУДОПОДЪЕМНИК-СПАСАТЕЛЬ | 2003 |
|
RU2261819C2 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 2005 |
|
RU2359861C2 |
Изобретение относится к судостроению, в частности к подводным аппаратам для захвата и подъема затонувших объектов. Подводный аппарат имеет корпус, закрепленный на раме, соединенной силовым канатом с надводным судном. Подводный аппарат снабжен клещевым захватом с соплами на концах для размыва грунта, понтоном и пневмошлангами. Подводный аппарат имеет дополнительные понтоны, связанные канатом со скобами клещевого захвата. Аппарат имеет зажимы каната, закрепленные на раме. Скобы клещевых захватов имеют гибкие канатные подвески, скрепляющие скобы с рамой и определяющую величину раскрытия скоб клещевых захватов. Достигается повышение надежности аппарата и ускорение подводно-спасательных работ. 1 з.п. ф-лы, 3 ил.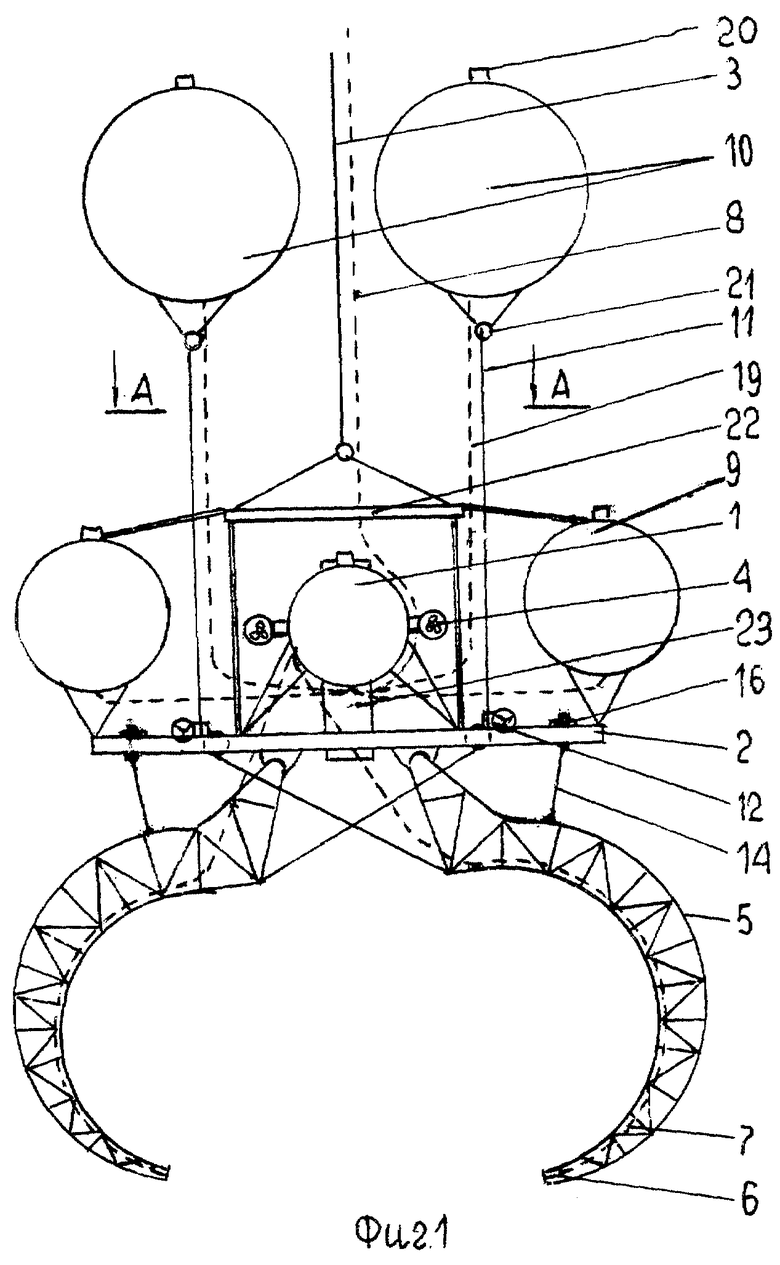
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 1995 |
|
RU2111890C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА | 1990 |
|
RU2025403C1 |
| Способ испытания эластичных трубопроводов на герметичность | 1987 |
|
SU1469373A1 |
| КОНТЕЙНЕР | 2009 |
|
RU2408515C1 |

