1. Область техники
Изобретение относится, в общем, к радиосвязи, а конкретно к способу повторного соединения прерванного вызова в системе связи с подвижными объектами.
2. Уровень техники
В наземной телефонной сети общего пользования (НТСОП) обычно соединение осуществляют между базовой станцией (БС) и мобильной станцией (МС) посредством радиосвязи. В некоторых случаях обслуживание вызовов невозможно осуществлять в "зонах молчания" в связи с особенностями радиосвязи, т.е. с распространением сигнала. Если абонент оконечного устройства перемещается пешком или в транспортном средстве, то вызов может быть прерван на некоторое время. Согласно обычному уровню техники, если прерывание вызова длится в течение определенного периода времени, то принимается решение о том, что обслуживание вызова не может быть обеспечено, и данный вызов разъединяется. Согласно нормативу IS-95 этот определенный период времени длится приблизительно 5 секунд (т.е. равен длительности одного цикла временного объединения цифрового сигнала 20 мс•270). После этого непреднамеренного разъединения вызывающий абонент должен снова устанавливать вызов с вызываемым абонентом.
Для решения указанной проблемы прерванных вызовов в известном уровне техники предлагается несколько решений, включая:
(1) Патент США 5546382: повторное соединение для непрерывного обслуживания передачи данных в случае сбоя передачи;
(2) Патент США 5239571: повторное соединение при непредусмотренном прекращении связи посредством дополнения оконечного устройства отдельным устройством либо путем модифицирования оконечного устройства. То есть с помощью ЗУПВ в оконечном устройстве запоминается информация о происхождении вызова и вызов автоматически устанавливают в случае непредусмотренного разъединения;
(3) Патент США 5566236: повторное подключение разъединенной телефонной связи с помощью близлежащей системы (например, с помощью учрежденческой телефонной станции с исходящей и входящей связью и с помощью централизованной службы станций указанного типа) с введением концепции логической сети.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача данного изобретения заключается в обеспечении способа автоматического повторного соединения прерванного вызова при обслуживании вызова в системе связи с подвижными объектами.
Еще одна задача данного изобретения заключается в обеспечении способа "ручного" повторного соединения прерванного вызова при обслуживании вызова в системе связи с подвижными объектами.
Другая задача данного изобретения заключается в обеспечении способа повторного соединения прерванного вызова при обнаружении мобильной станцией прерывания вызова.
Еще одна задача данного изобретения заключается в обеспечении способа повторного соединения прерванного вызова при обнаружении прерывания вызова системой, т. е. базовой станцией (БС) или коммутатором подвижных объектов (КПО).
Также задача данного изобретения заключается в обеспечении способа повторного соединения вызова, прерванного из-за сбоя в работе двусторонних каналов связи между мобильной станцией (МС) и системой, при обнаружении прерывания вызова и МС, и системой.
Еще одна задача данного изобретения заключается в обеспечении способа повторного соединения прерванного вызова, когда мобильная станция (МС) обнаруживает прерывание вызова и запрашивает регистрацию местоположения.
Вкратце эти задачи решаются способом повторного соединения вызова, прерванного помехой обслуживанию во время связи между абонентом МС и абонентом, сообщающимся с абонентом МС по системе связи с подвижными объектами, имеющей множество подключенных друг к другу КПО, причем каждый КПО подключен к множеству базовых станций (БС). Если данная помеха длится по меньшей мере в течение заданного первого периода времени, то абонент МС направляет сигнал запроса на повторное соединение. Затем связь повторно инициируют между абонентом МС и его соответствующим абонентом через одну БС из указанного множества БС и один из КПО, подключенных к БС, при реагировании на сигнал запроса на повторное соединение.
Краткое описание чертежей
Преимущества данного изобретения станут более очевидными из подробного описания предпочтительных осуществлений со ссылкой на прилагаемые чертежи, на которых:
фиг.1 - блок-схема системы связи с подвижными объектами согласно данному изобретению;
фиг. 2 изображает поле сигнала разъединения вызова, указывающего, сформирован ли сигнал разъединения вызова в нормальном состоянии или из-за прерванного вызова;
фиг.3 изображает параметр сигнала запроса на повторное соединение, используемое для соединения с установившимся вызовом в состоянии временного занятия линии;
фиг.4 изображает параметр, указывающий, регистрируется ли отдельно функция повторного соединения прерванного вызова в качестве дополнительного вида обслуживания для каждой МС;
фиг. 5 изображает параметр, проводящий различие между обычным сигналом разъединения вызова и сигналом разъединения вызова из-за прерванного вызова;
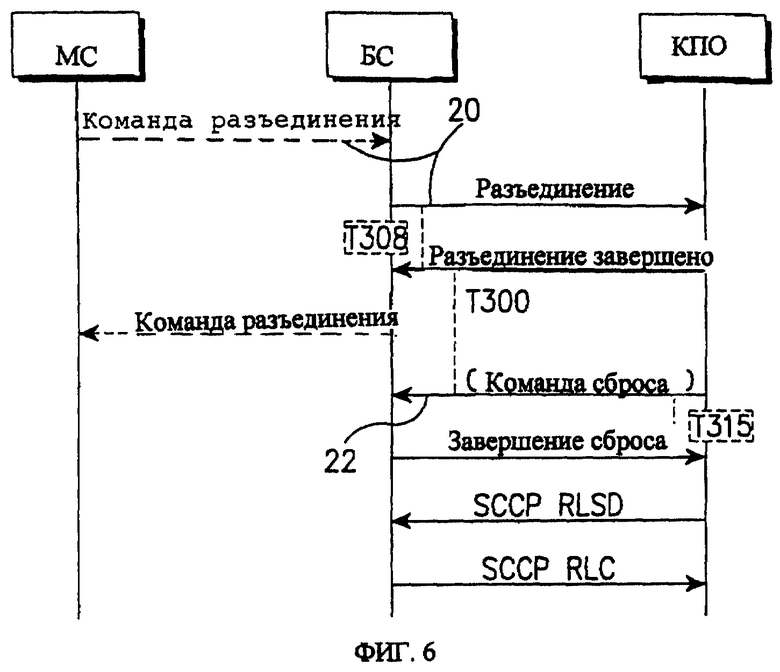
фиг.6 - схема последовательности операций способа для разъединения вызова от МС по нормативу IS-634;
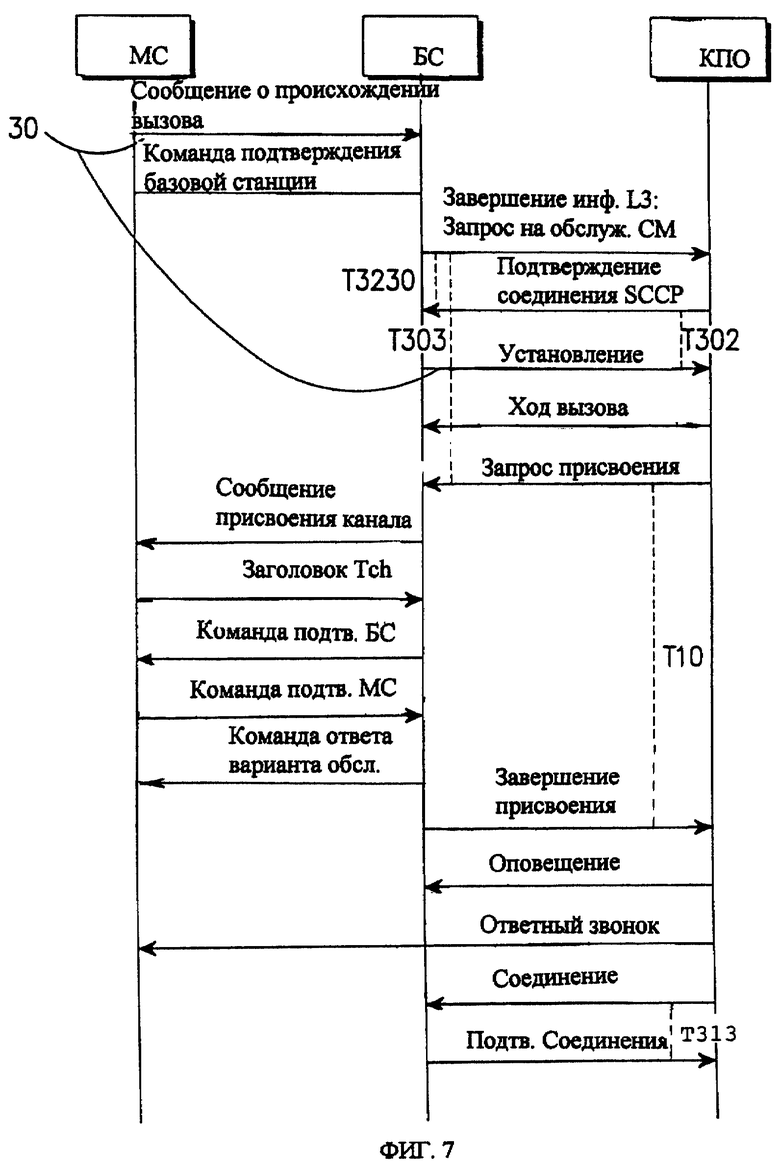
фиг.7 изображает процесс вызова, исходящего от МС;
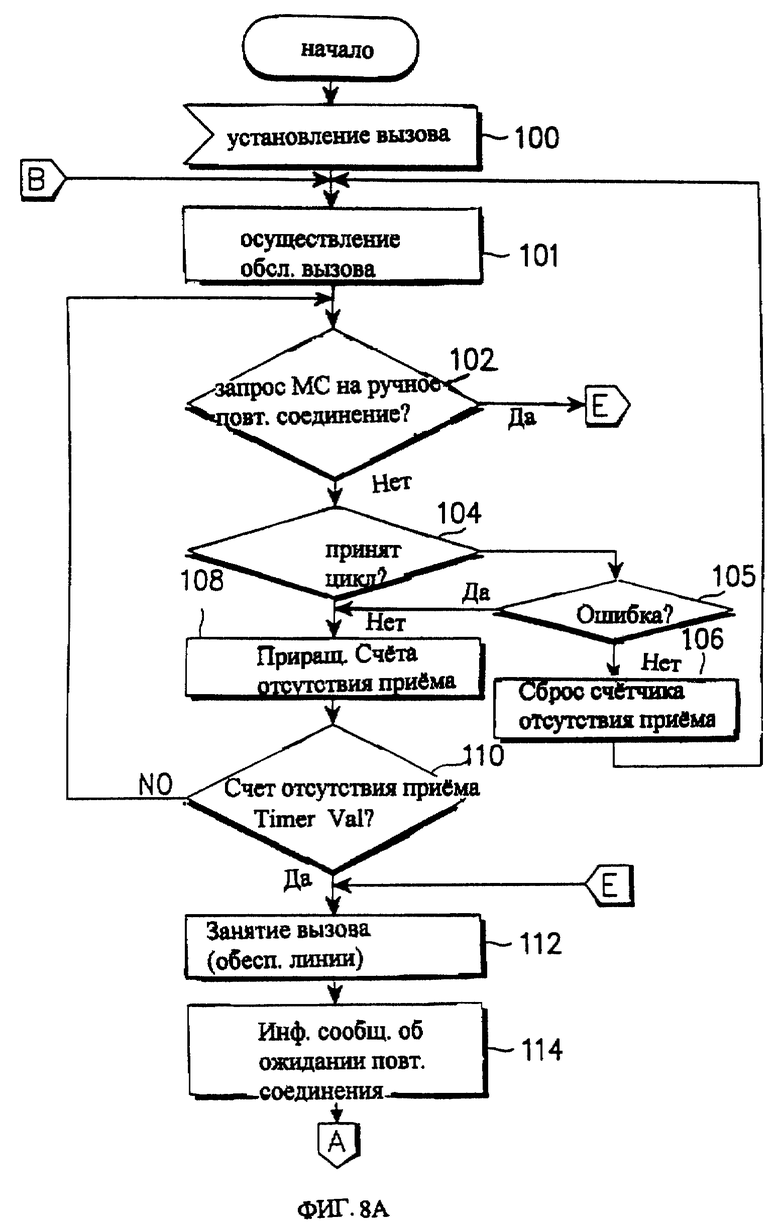
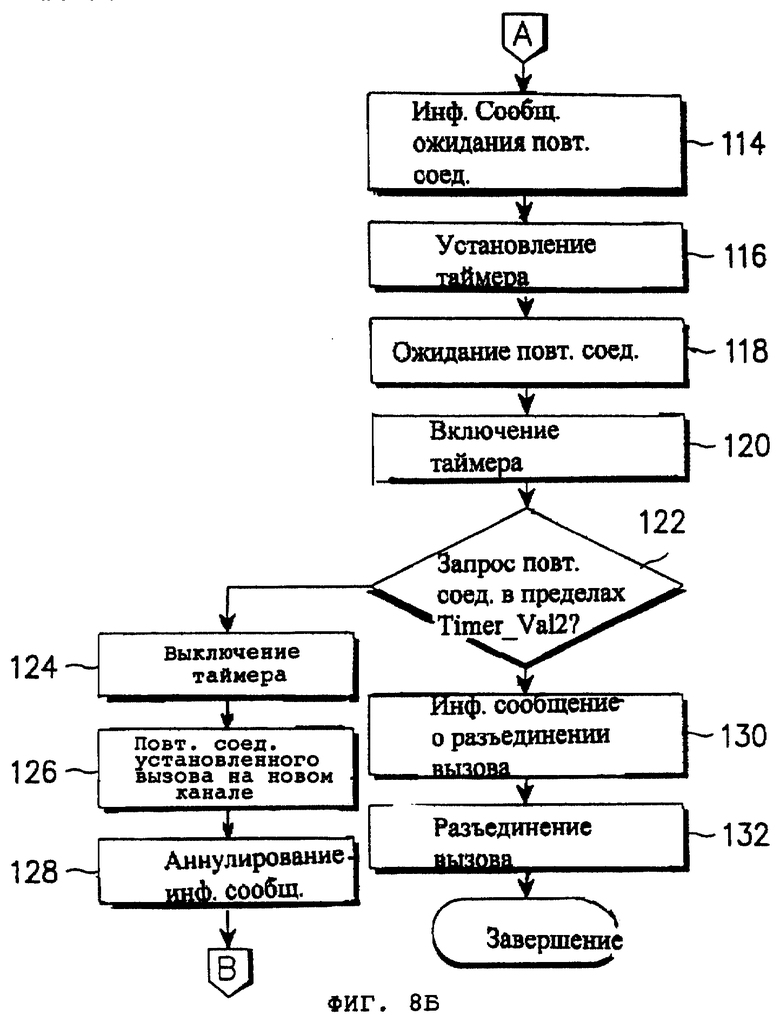
фиг. 8 - сводная схема последовательности операций, изображающая способ обработки прерванного вызова в МС, БС или КПО в соответствии с осуществлениями данного изобретения;
фиг.9 - схема последовательности операций, изображающая способ обработки прерванного вызова при обнаружении прерывания вызова посредством МС;
фиг.10 - схема последовательности операций способа обработки прерванного вызова при обнаружении прерывания вызова системой;
фиг. 11 - схема последовательности операций, изображающая способ обработки прерванного вызова при обнаружении прерывания вызова, вызванного двусторонними каналами нагрузки, как посредством МС, так и системой;
фиг. 12 - схема последовательности операций, изображающая способ обработки прерванного вызова в случае, когда МС обнаруживает прерывание вызова и выдает запрос на регистрацию местоположения;
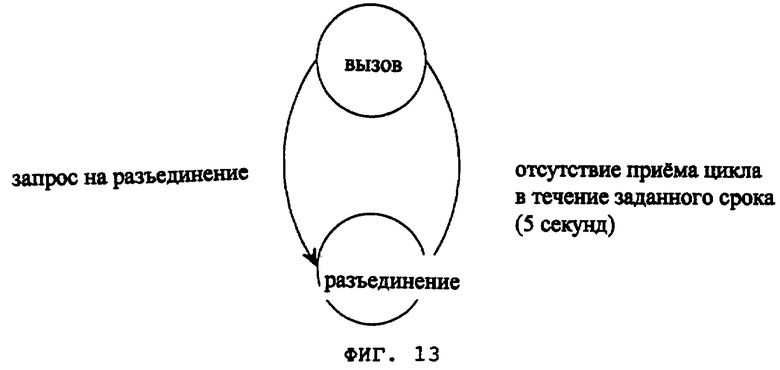
фиг.13 - схема обычных состояний обработки вызова;
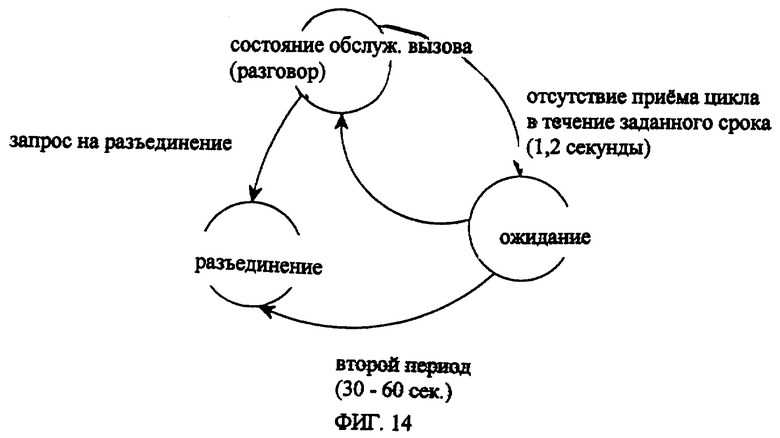
фиг.14 - схема состояний обработки вызова согласно осуществлениям данного изобретения;
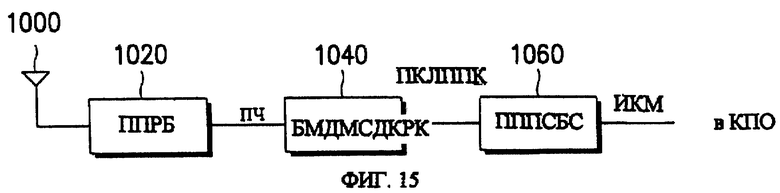
фиг.15 - блок-схема БС для обнаружения прерванного вызова.
Подробное описание предпочтительных осуществлений
Предпочтительные осуществления данного изобретения описываются подробно со ссылкой на прилагаемые чертежи. Аналогичные ссылочные обозначения обозначают те же компоненты на чертежах. Также нужно отметить, что известные конструкции и функции данного изобретения не описываются подробно, т.к. это будет перегружать описание самого предмета данного изобретения.
Термины и определения
"Текущее обслуживание вызова": состояние, при котором выполняется передача речи и данных в виде неподвижных изображений, киноизображений и т.п.
"Прерванный вызов": вызов, обеспечиваемый обслуживанием вызовов и который более не может обеспечиваться либо временно, либо совсем. Прерванный вызов может быть обусловлен разъединением вызова, помехами на конкретном канале либо неисправностью.
"Разъединение вызова": состояние, при котором вызов остается разъединенным в течение определенного периода времени.
Осуществления данного изобретения описываются в контексте Северо-американского стандарта системы цифровой связи с подвижными объектами (IS-95, IS-634 и IS-41) в качестве примера. Данное изобретение также применимо для норматива 3G IS-95, который обеспечивает дополнительные виды обслуживания высококачественной передачи речи, высокоскоростной передачи данных, киноизображений и просмотр в "Интернет".
Обращаясь к фиг.1: система связи с подвижными объектами, к которой относится данное изобретение, содержит РСМ (Регистр Собственных Местоположений) 80, КПО (Коммутаторы Подвижных Объектов) КПО0 70а и КПО1 70b, КБС (Контроллеры Базовых Станций) КБСО0 64а, КБС01 64b и КБС101 64с, ПППСБС (Приемопередающие Подсистемы Базовых Станций) ПППСБС000 62а - ПППСБС101 62f, и МС 50. Некоторое множество РСМ и КПО подключены друг к другу в НТСОП для обслуживания абонентов и коммутации вызовов. В соответствии с фиг.1 РСМ 81 подключен к некоторому множеству КПО, КПО0 70а и КПО1 70b. Каждый КПО в свою очередь подключен к некоторому множеству КБС и каждый КБС подключен к некоторому множеству ПППСБС. БС обычно состоит из КБС и ПППСБС.
КПО управляет подключением к ТСОП (телефонная сеть общего пользования) и НТСОП (наземная телефонная сеть общего пользования). КБС управляет радиоканалом и выполняет сдачу вызова, ПППСБС формирует линию радиосвязи с МС и управляет радиосредствами, РСМ регистрирует местоположения абонента и действует в качестве базы данных для запоминания абонентской информации. Каждый КПО имеет РПМ (Регистр Постороннего Местоположения) для временного запоминания информации МС, входящей в зону обслуживания данного КПО. Если данная МС перемещается в другую зону обслуживания, то запомненную информацию аннулируют.
Для установления вызова система связи с подвижными объектами присваивает радиоканалы между МС и ПППСБС, формирует линии связи между ПППСБС и КБС, между КБС и КПО и между КПО и НТСОП или внешней сетью, такой как ТСОП. Если установленный вызов нельзя обеспечивать в течение определенного периода времени по той причине, что МС находится в зоне молчания, или по причине характеристик радиосвязи, то система связи с подвижными объектами обычно разъединяет вызов. Проблемы зоны молчания могут возникать в связи с рядом ситуаций, включая, например, лифт, безрелейный туннель, длинный туннель между соседними ячейками, зона молчания между стоящими тесно рядом друг с другом высокими зданиями.
Прерывание вызова, определяемое в осуществлениях данного изобретения, может иметь место в местоположениях, указываемых ссылочными обозначениями 10, 12, 14 и 16 на фиг.1.
Ссылочные обозначения 10, 12 и 14 указывают местоположения прерванного вызова в одной и той же зоне КПО; и обозначение 16 указывает местоположение прерванного вызова между ПППСБС, охватываемых разными КПО. Конкретно, ссылочное обозначение 10 обозначает местоположение прерванного вызова МС 50, осуществляющей связь с ПППСБС000 62а в зоне обслуживания ПППСБС000 62а; ссылочное обозначение 12 обозначает местоположение прерванного вызова МС 50, осуществляющей связь с ПППСБС000 62а или ПППСБС001 62b в зоне обслуживания КБС 64а; и ссылочное обозначение 14 обозначает местоположение прерванного вызова МС 50, осуществляющей связь с ПППСБС001 62b или ПППСБС010 62с на границе их зон обслуживания.
БС и КПО на фиг.1 управляют повторным соединением прерванного вызова, используя, возможно, один и тот же алгоритм.
Функция повторного соединения прерванного вызова может быть обеспечена двумя способами: (а) система прилагает эту функцию одинаково ко всем МС путем модифицирования их действия; и (б) функцию обеспечивают на индивидуальной основе для каждой МС в качестве дополнительного обслуживания. Первый способ применим, если все абонентские оконечные устройства аналогично конфигурированы для выполнения функции повторного соединения прерванного вызова. Второй способ обеспечивает гибкое применение функции повторного соединения, при котором требуется, чтобы только абоненты, которым необходимо обслуживание, модифицировали свои оконечные устройства.
В осуществлениях данного изобретения либо модифицируют имеющиеся сигналы, либо используют новые сигналы. Имеющиеся сигналы разъединения вызова включают в себя сигнал разъединения между БС и КПО, а "сигнал команды разъединения" между МС и БС можно использовать с новой функцией, или он может дополнять новую функцию. Если прерывание вызова можно обнаружить из сигналов разъединения вызова, то можно использовать их. В противном случае их дополняют параметром, изображаемым на фиг. 2, чтобы отдельно указать обычный сигнал разъединения вызова или сигнал разъединения вызова, обусловленный прерванным вызовом.
На фиг. 2 параметр RELEASE_STAT, указывающий статус разъединения, добавляют к сигналу разъединения вызова, чтобы отличить обычный сигнал разъединения вызова от сигнала разъединения вызова, обусловленного прерванным вызовом. Этот параметр занимает один бит. Если этим битом является нуль, то это указывает обычный сигнал разъединения вызова. Если этот бит равен единице, то это указывает сигнал разъединения вызова из-за прерванного вызова.
Обычный протокол использования имеющихся сигналов "Разъединение" и "Команда разъединения" изображен, например на фиг.6, где показан ход сигнала для разъединения исходящего от МС вызова согласно нормативу IS-634. Ссылочное обозначение 20 означает сигналы "Разъединение" и "Команда разъединения". Либо в этих же целях параметр RELEASE_STAT можно добавить к сигналу "Сброс". В качестве дополнительного альтернативного решения можно использовать новый сигнал.
Для получения информации, используемой для подключения к установленному вызову при временном занятии линии, можно использовать или модифицировать обычный сигнал запроса на повторное соединение "Повторное соединение", направляемый от МС в БС, от БС в КПО, от КПО в РПМ, и от КПО в другой КПО. При направлении от МС в БС, или от БС в КПО, сообщения, используемые для исходящего вызова, используют дополнительный параметр OLD_BS_ID согласно фиг. 3 в качестве информации, используемой для соединения с установленным вызовом при временном занятии линии. Этот параметр содержит 16 битов и может быть сформирован путем модифицирования имеющегося исходящего вызова и сигнала установления вызова.
Фиг. 7 изображает процедуру для хода вызова, исходящего из МС. На фиг.7 ссылочное обозначение обозначает сигналы "Команда вызова" и "Установление", которые добавляют посредством параметра OLD_BS_ID.
Чтобы указать, обеспечивают ли функцию повторного соединения прерванного вызова в качестве дополнительного вида обслуживания для каждой МС: согласно вышеизложенному параметр DCAR_FLAG, в соответствии с фиг.4, добавляют к данным в РСМ 80 и РПМ0 72а и РПМ1 72а фиг.1. Этот параметр является одноразрядным. Если числом битов является нуль, то это указывает состояние выведения из действия (0=DACT), если этот бит является единицей, то это указывает состояние приведения в действие (1=АСТ).
Параметр WATING_FLAG, изображаемый на фиг.5, для проведения различия между обычным сигналом разъединения вызова и сигналом разъединения вызова, обусловленного прерванным вызовом, добавляют к абонентским данным в РПМО 72а и РПМ1 72а на фиг.1. Этот параметр является одноразрядным. Если этот бит является нулем, то это указывает обычное состояние разъединения вызова (0=NORMAL), и если этот бит является единицей, то это указывает состояние разъединения из-за прерывания вызова (1=DROP). Первоначальное значение этого параметра является нулевым.
Обнаружение прерванного вызова
Прерванный вызов распознают следующими методами согласно осуществлениям данного изобретения.
Первое осуществление: обнаружение посредством МС
Обнаружение прерванного вызова посредством МС: МС обнаруживает прерывание осуществляемого в данное время вызова, происходящее из-за неисправности канала от системы к МС. Например, МС запоминает информацию о прерывании вызова и если МС переходит в нормальное состояние, то она уведомляет систему о прерывании вызова. То есть МС уведомляет ВС и КПО.
Второе осуществление: обнаружение системой
Обнаружение прерванного вызова системой: в этом случае система может определить, прерывается ли осуществляющийся в данное время вызов. Прерывание вызова происходит из-за неисправности канала, направленного от МС к системе. Система направляет запрос на повторное соединение в МС для выполнения функции повторного соединения либо сама выполняет функцию повторного соединения.
Третье осуществление:
Неисправность двусторонних каналов между МС и системой.
Четвертое осуществление:
Запрос на регистрацию местоположения от МС: после прерывания вызова МС переходит в нормальное состояние без информации о местоположении, обусловленном прерыванием вызова; резервирует информацию, которая отличается от имеющихся параметров; и запрашивает у системы регистрацию местоположения в связи с прерыванием вызова. При прерывании вызова в этой ситуации МС обычно устанавливается в исходное состояние и регистрирует свое местоположение. Если скорректированное значение параметра WAITING_ FLAG в РПМ составляет единицу, то ранее установленный вызов повторно соединяют. Регистрацией местоположения является процесс, согласно которому МС уведомляет ПППСБС о своем местоположении, статусе, идентификации, цикле временного интервала и других характеристиках.
Обработка прерывания вызова
Обработка прерванного вызова изменяется в зависимости от того, как обнаружен прерванный вызов. До описания обработки прерванного вызова в соответствии с описанными ранее четырьмя способами обнаружения обработка прерванного вызова, выполняемая посредством МС, БС и КПО, отдельно или в сочетании, будет описываться в общем со ссылкой на фиг.1 и фиг.8.
По фиг. 8 вызов устанавливают на этапе 100, и он переходит к этапу 101. МС или БС определяют на этапе 102, имеется ли запрос на ручное повторное соединение от абонента МС в течение вызова. Абонент МС может вручную запросить повторное соединение вызова нажатием кнопки запроса на ручное повторное соединение, если имеются серьезные помехи в речи или изображениях, или когда во время вызова речи не слышно. Клавиша запроса на ручное повторное соединение может предусматриваться на клавиатуре оконечного устройства, либо она может обеспечиваться с помощью имеющейся Функциональной клавиши, либо ее можно создать комбинацией имеющихся цифровых кнопок.
При отсутствии запроса на ручное повторное соединение от абонента МС: определяют, на этапе 104, идет ли непрерывный прием циклов на данном канале нагрузки. При приеме цикла определяют, на этапе 105, имеет ли принимаемый цикл ошибку. Если ошибок в цикле не имеется, то в счетчик подсчета непринятых или ошибочных циклов (далее - счетчик отсутствия приема) заносят "0" - этап 106. Если в цикле, на этапе 105, имеется ошибка, то счетчику отсутствия приема дают приращение на этапе 108. Потом определяют, равно ли значение счета отсутствия приема заданному периоду времени Timer_Val1, или превышает его - этап 110. Заданное время Timer_Val1 изменяется в зависимости от состояния действия системы и характеристик абонента, находясь в пределах от нуля до десяти секунд, предпочтительно 1,2 секунды, для определения факта прерывания вызова. Период в 1,2 секунды приблизительно на 5 секунд короче времени разъединения вызова в известном уровне техники. Значение Timer_Val1 регистрируют в качестве данных инициализации системы, и это значение может изменяться оператором. Если функция повторного соединения прерванного вызова единообразно зарегистрирована для всех МС, то значение Timer_Val1 всех МС устанавливают в качестве заданного значения, обычно применимого для всех МС. С другой стороны, если данную функцию предоставляют для каждой МС отдельно, тогда значение Timer_Val1 является особым для каждой МС.
Далее следует подробное описание методов обнаружения прерванного вызова посредством МС и БС.
Обнаружение прерывания вызова посредством БС
Фиг.15 представляет блок-схему БС для обнаружения прерывания вызова. Обращаясь к фиг.15: сигнал многостанционного доступа с кодовым разделением каналом (МСДКРК), принимаемый по антенне 1000, преобразуют в сигнал ПЧ (промежуточной частоты) с помощью приемопередающего радиочастотного блока (ППРБ) 1020. Блок модуляции-демодуляции МСДКРК (БМДМСДКРК) 1040 преобразует ПЧ-сигнал в пакет кодирования с линейным предсказанием кода "Куэлкомм" (ПКЛПКК). При этом БМДМСДКРК 1040 определяет, является ли данный пакетный цикл нормальным или несоответствующим, путем его проверки посредством контроля при помощи циклического избыточного кода (ЦИК); и если данный цикл является несоответствующим, то этот блок добавляет информацию указания несоответствия (матрица качества Н'00-H'ff) к преобразованному пакету. Если информация указания несоответствия является нулем, то TSB 1060 подвергает пакетный цикл, принятый от БМДМСДКРК 1040, операции несоответствия. Если эта информация является единицей, то TSB 1060 преобразует принятый пакетный цикл в сигнал импульсно-кодовой модуляции (ИКМ) и направляет сигнал ИКМ в КПО.
Если определено, что данный пакетный цикл имеет плохое качество, то TSB 1060 подсчитывает продолжающиеся ошибки и непринятые циклы с помощью таймерного прерывания, формируемого каждый 20 мс, чтобы принять окончательное решение, прерван ли данный вызов, или нет. То есть определяют, принимается ли цикл в каждое прерывание, составляющее 20 мс.
Если из БМДМСДКРК 1040 принимают 20 следующих один за другим циклов плохого качества, то TSB 1060 сочтет это обстоятельство признаком прерывания вызова. Тогда, если определенное число следующих один за другим циклов плохого качества принято в течение первого заданного периода времени, то TSB 1060 делает вывод о том, что данный вызов прерван. Исходя из того, что первый заданный период времени составляет 2 с, например, TSB 1060 констатирует прерывание вызова, если принимает 80 следующих один за другим циклов плохого качества. Но если приняты два последовательных нормальных цикла, то инициализируют счетчик отсутствия приема и TSB 1060 возвращается в режим обычной работы. С другой стороны, если 20 следующих один за другим циклов не приняты, то TSB 1060 считает это обстоятельство признаком прерывания вызова. Тогда, если в течение второго заданного периода времени какие-либо последовательные циклы не приняты, то TSB 1060 констатирует, что осуществляющийся в данное время вызов прерван. Второй заданный период времени предпочтительно короче первого заданного периода времени.
Обнаружение прерывания вызова с помощью МС
Далее следует описание обнаружения прерывания вызова с помощью МС. МС контролирует прямой канал нагрузки в состоянии канала нагрузки. Если МС принимает L число последовательных циклов плохого качества на прямом канале нагрузки, то она выводит из действия свой передатчик. Затем, если принято М число качественных циклов, то МС включает свой передатчик. Во время включения своего передатчика МС приводит в действие реле регулирования уровня сигнала для прямого канала нагрузки в под-состоянии инициализации канала нагрузки МС-контроля в состоянии канала нагрузки. Первое реле регулирования уровня сигнала устанавливают на N секунд, когда принято М-число последовательных качественных циклов. Если в течение этой последовательности реле регулирования уровня сигнала последовательные качественные циклы не приняты, тогда МС выключает передатчик и констатирует прерывание вызова.
Обращаясь к фиг. 8: если МС и/или БС обнаруживает прерывание вызова на этапах 104 и 106, то они удерживают текущий вызов на этапе 112 и при этом все еще сохраняются линии радиосвязи между МС и БС, между БС и КПО, и между КПО и ТСОП (или другим КПО). При необходимости линии радиосвязи между МС и БС и между БС и КПО можно разъединить. На этапе 114 информационное сообщение с уведомлением об ожидании повторного соединения направляют другому абоненту или в компанию связи. Это сообщение имеет вид речевого сообщения, музыкального, тонального или беззвучного для другого телефонного абонента. Это сообщение имеет вид отсутствия данных для абонента службы передачи данных и для службы передачи данных.
На этапе 116 таймер устанавливают на заданный период времени Timer_Val2. Если на этапе 118 вводят состояние ожидания, то таймер приводят в действие на этапе 120. На этапе 122 определяют, имеется ли запрос на повторное соединение или запрос на регистрацию местоположения от МС или системы (ВС или КПО) до истечения времени действия таймера. Значение таймера Timer_Val2 изменяется в зависимости от рабочего состояния системы и характеристик абонента в пределах от нескольких десятков секунд до сотен секунд (например, 10-180 секунд), чтобы определить время срабатывания разъединения вызова. Значение Timer_ Val2 предпочтительно составляет от 30 до 60 секунд. При единообразном регистрировании функции повторного соединения прерванного вызова для всех МС значение Timer_Val2 устанавливают на заданное значение, применимое для всех МС. С другой стороны, если эту функцию обеспечивают для каждой МС отдельно, то значение Timer_Val2 изменяется для каждой МС.
При запросе на повторное соединение вызова или запроса на регистрацию местоположения в течение значения Timer_Val2 на этапе 122 таймер выключают на этапе 124. На этапе 126 установленный вызов разъединяют из удерживаемого состояния и повторно соединяют на канале нагрузки сообразно с новым местоположением МС. Информационное сообщение аннулируют на этапе 128. Поэтому МС может продолжать связь с другим абонентом или компанией связи в имеющемся обслуживании вызова. Но если в течение значения Timer_Val2 запрос на повторное соединение не поступает, то другому абоненту или в компанию связи направляют информационное сообщение, уведомляющее о прерывании вызова, и на этапе 132 вызов разъединяют.
Далее со ссылкой на фиг.1 и фиг.8-12, следует описание обработки прерванного вызова в соответствии с описываемыми выше четырьмя осуществлениями обнаружения прерванного вызова.
Предварительно нужно отметить, что та же зона КПО/РПМ и другая зона КПО/РПМ на фиг. 9-12, соответственно, указывают, что данная МС находится в той же зоне КПО/РПМ во время прерывания вызова и выдачи запроса на повторное соединение, и запроса на регистрацию местоположения, и что данная МС находится в других зонах КПО/РПМ во время прерывания вызова и во время выдачи запроса на повторное соединение и запроса на регистрацию местоположения.
Первое осуществление: обработка прерывания вызова, обнаруженного с помощью МС
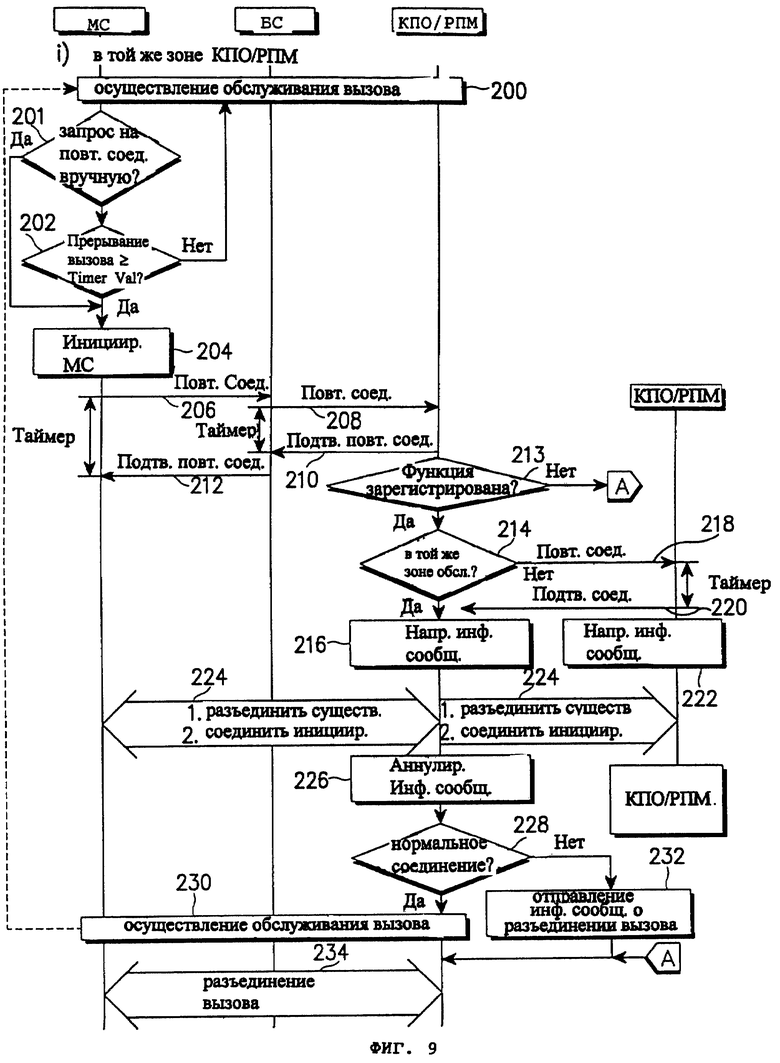
Фиг. 9 изображает схему последовательности обработки прерванного вызова, если МС обнаруживает прерывание вызова. Эта ситуация возникает по причине неисправного канала нагрузки от системы в МС.
Обращаясь к фиг.1 и 9: когда абонент МС нажимает клавишу запроса на повторное соединение во время вызова на этапе 200, МС воспринимает запрос на повторное соединение на этапе 205 и инициализируется на этапе 204. Если вызов прерван по причине отсутствия приема циклов во время вызова на этапе 200, то определяют, длится ли состояние прерывания вызова в течение заданного времени Timer_Val1 на этапе 202, или дольше. Если это определено, то МС инициализируют на этапе 204. В данном случае этап 204 можно пропустить.
Затем, если прерывание вызова устранено, например, благодаря изменению в местоположении МС, то МС направляет сигнал запроса на повторное соединение "Повторное соединение", имеющее параметр OLD_BS_ID, согласно фиг.3, в обслуживающую ее БС, на этапе 206. Обслуживающая БС направляет сигнал "Повторное соединение" в соответствующий КПО на этапе 208. На этапе 210 КПО направляет сигнал "Reconnect_Ack" (подтверждение повторного соединения) назад в обслуживающую БС, и на этапе 212 БС направляет сигнал "Reconnect_Ack" назад в МС.
На этапе 213 КПО определяет, зарегистрирована ли функция повторного соединения вызова единообразно для всех МС, или как дополнительный вид обслуживания для отдельной МС. Если ей отдельно предоставляют в качестве дополнительного вида обслуживания, то КПО далее определяет, зарегистрирована ли функция повторного соединения для ее выполнения для МС, требующей повторное соединение вызова, путем анализирования параметра DCAR _FLAG, запомненного в его РПМ. Если функция повторного вызова не зарегистрирована, то операцию разъединения вызова выполняют на этапе 234. Если функция повторного соединения вызова зарегистрирована, то на этапе 214 КПО определяет, указывает ли параметр OLD_BS_ID принятого сигнала "Повторное соединение", что данная МС находится в зоне обслуживания данного КПО. Если он указывает обслуживающую БС, то КПО направляет сообщение, уведомляющее об ожидании повторного соединения другому абоненту или в компанию связи на этапе 216. Например, текущий вызов прерывается, когда МС 50 находится в зоне обслуживания ПППСБС000 62а, и МС перемещается в зону ПППСБС001 62б и запрашивает повторное соединение вызова. Затем КПО0 70а распознает, что МС 50 находится в его зоне обслуживания, и направляет сообщение, уведомляющее об "ожидании повторного соединения", другому абоненту или в компанию связи.
Если МС не находится в зоне обслуживания КПО на этапе 214, то КПО направляет принятый сигнал "Повторное соединение" в другой КПО на этапе 218. Новый КПО направляет сигнал "Reconnect_Ack" в предыдущий КПО на этапе 220 и направляет сообщение, уведомляющее об "ожидании повторного соединения" другому абоненту или в компанию связи. Например, текущий вызов прерывают, когда МС 50 находится в зоне обслуживания ПППСБС011 62d, и МС 50 перемещается в зону ПППСБС100 62е, и запрашивает повторное соединение вызова. Затем КПО0 70а направляет в КПО1 70b сигнал "Повторное соединение", т.к. МС 50 находится вне его зоны обслуживания, и КПО1 70b направляет информационное сообщение, уведомляющее об ожидании повторного соединения, другому абоненту или в компанию связи.
После этапа 216 или 222 КПО разъединяет имеющиеся линии связи и подключает инициированный вызов согласно текущему местоположению МС на этапе 224. Если МС находится в пределах зоны обслуживания того же КПО, тогда устанавливают исходящий вызов, и существующие линии связи разъединяют, и инициированный вызов подключают так же, как и аппаратурно-реализованную сдачу вызова между БС, например, МС 50 перемещается из зоны обслуживания ПППСБС000 62а в зону обслуживания ПППСБС001 62b и запрашивает повторное соединение; при этом имеющиеся линии связи между МС 50 и ПППСБС000 62а и между ПППСБС000 62а и КБС00 64 разъединяют, и линии связи устанавливают между МС 50 и ПППСБС001 62b и между ПППСБС001 62b и КБС00 64а. При этом эти новые линии связи подключают к другому абоненту или к компании связи. С другой стороны, если МС находится в пределах зоны обслуживания разных КПО, то устанавливают исходящий вызов, и имеющиеся линии разъединяют, и инициированный вызов подключают таким же образом, как и аппаратурно-реализованную сдачу вызова между КПО. Например, МС 50 перемещается из зоны обслуживания ПППСБС100 62е в зону обслуживания ПППСБС011 62d и запрашивает повторное соединение, имеющиеся в данное время линии связи между МС 50 и ПППСБС100 62е, между ПППСБС100 62е и КБС10 64с и между КБС10 64с и КП01 70b разъединяют, и линии связи устанавливают между МС 50 и ПППСБС011 62d, между ПППСБС011 62d и КБС01 64b, между КБС01 64b и КПО 70а, и между КПО0 70а и КПО1 70b. Затем эти новые линии связи подключают к другому абоненту или к другой компании связи.
На этапе 226 КПО аннулирует информационное сообщение об ожидании повторного соединения и на этапе 228 определяет, нормальным ли образом соединен инициированный вызов с другим абонентом или с другой компанией связи. Если это соединение нормальное, то вызов переходит к этапу 230. В противном случае КБСМ направляет информационное сообщение, уведомляющее о разъединении вызова, другому абоненту или другой компании связи на этапе 232 и выполняет операцию разъединения вызова на этапе 234.
Согласно фиг. 9 таймер, установленный на Timer_Val2 на этапах 116 и 122 фиг. 8, не действует. Причина этого заключается в том, что МС дает запрос на повторное соединение вскоре после своей инициализации на этапах 204 и 206, и, таким образом, для БС нет необходимости определять, прошло ли заданное количество времени после запроса на повторное соединение.
Второе осуществление: обработка прерывания вызова, обнаруженного системой (т.е. БС или КБС)
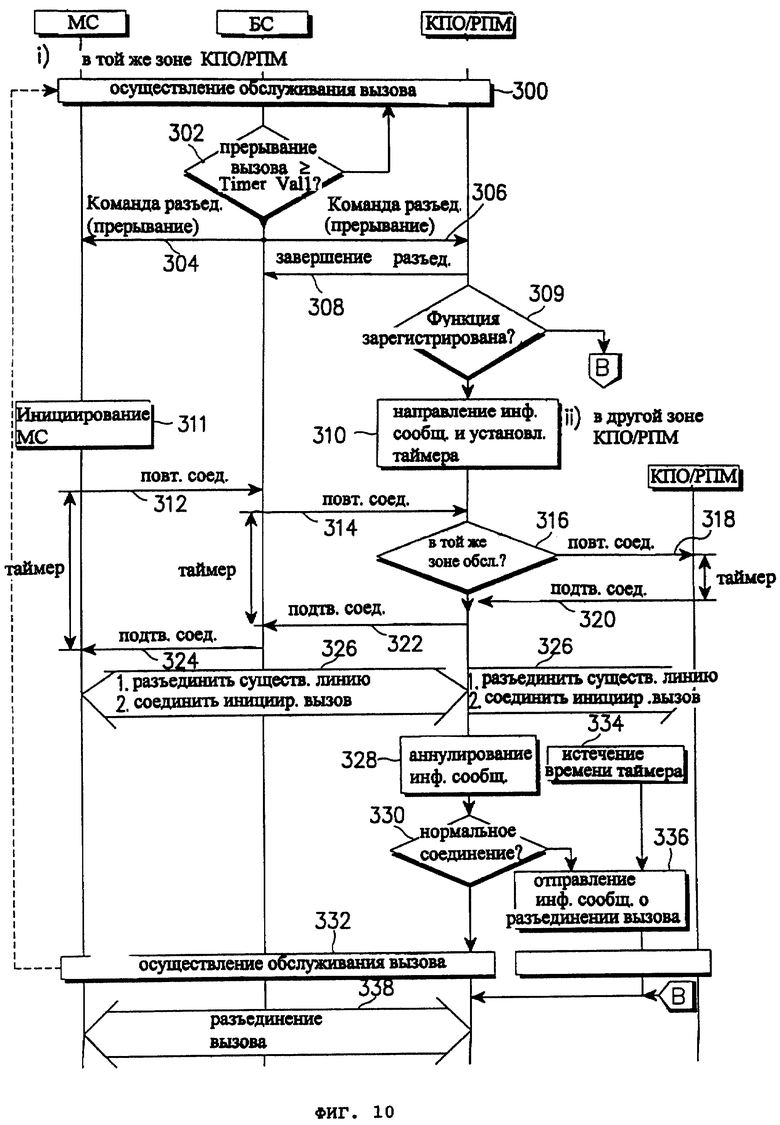
Фиг. 10 представляет схему последовательности операций обработки прерванного вызова, если система обнаруживает прерывание вызова. Это происходит по причине неисправного канала нагрузки от МС в систему.
Обращаясь к фиг.1 и 10: если вызов прерван по причине отсутствия приема циклов во время вызова на этапе 300, то БС определяет, длится ли состояние прерывания вызова столько же или дольше, чем предусмотрено заданным временем Timer_ Val1 на этапе 302. Если это так, то БС направляет сигнал "Команда разъединения", содержащий параметр RELEASE_STAT, установленный на единицу (DROP= 1) в МС на этапе 304, и сигнал "Разъединение", содержащий параметр RELEASE_ STAT, установленный на единицу (DROP=1), в КПО на этапе 306, Затем КПО направляет сигнал "Завершение разъединения" в БС на этапе 308. На этапе 309 КПО определяет, зарегистрирована ли единообразно функция повторного соединения вызова для всех МС или как дополнительный вид обслуживания для отдельной МС; и зарегистрирована ли функция повторного соединения, если ее отдельно обеспечивают в качестве дополнительного вида обслуживания, в целях ее выполнения для данной МС путем анализирования параметра DCAR_FLAG, запомненного в РПМ. Если функция повторного соединения вызова не зарегистрирована независимо от ее всеобщего или отдельного предоставления, то на этапе 338 выполняют операцию разъединения вызова. Если функция повторного соединения вызова зарегистрирована, то КПО направляет информационное сообщение с уведомлением ожидания повторного соединения другому абоненту или в компанию связи, и приводит в действие таймер, устанавливая таймер на Timer_Val2 на этапе 310.
На этапе 311 инициализируют МС, принявшую сигнал "Команда разъединения" с параметром RELEASE_STAT, установленным на единицу (DROP=1), от обслуживающего КПО или от другого КПО. Этот этап можно пропустить, т.к. МС может изменить используемый канал нагрузки на новый канал нагрузки без своей инициализации. После этапа 311, если прерывание вызова устранено в связи с изменением местоположения МС, то МС направляет сигнал "Повторное соединение" с параметром OLD_BS_ID на этапе 312. БС направляет сигнал "Повторное соединение" в КПО на этапе 314. КПО определяет, на этапе 316, представляет ли параметр OLD_BS_ID идентификатор БС в данной зоне обслуживания. Если представляет, то КПО направляет сигнал "Подтверждение повторного соединения" (Reconnect_ Ack) в БС на этапе 322, и БС направляет сигнал "Подтверждение повторного соединения" в МС на этапе 324.
Если этот параметр не представляет БС, обслуживаемую данным КПО, на этапе 316, то КПО направляет принятый сигнал "Повторное соединение" в соответствующий КПО на этапе 318. Новый КПО направляет сигнал "Подтверждение повторного соединения" в старый КПО на этапе 320. Затем старый КПО направляет сигнал "Подтверждение повторного соединения" на этапе 322, и БС направляет в МС сигнал "Подтверждение повторного соединения" на этапе 324.
На этапе 326 КПО разъединяет имеющиеся линии связи и соединяет инициированный вызов. Если данная МС находится в зоне обслуживания того же КПО, то устанавливают исходящий вызов, и имеющиеся линии связи разъединяют, и инициированный вызов соединяют таким же образом, как и аппаратурно-реализованную сдачу вызова между БС. С другой стороны, если МС находится в пределах зоны обслуживания разных КПО, то тогда устанавливают исходящий вызов, и существующие линии связи разъединяют, и инициированный вызов соединяют аналогичным образом, как и в случае аппаратурно-реализованной сдачи между КПО.
На этапе 328 КПО аннулирует информационное сообщение, уведомляющее об ожидании повторного соединения, и на этапе 330 определяет, совершено ли нормальное соединение инициированного вызова с другим абонентом или компанией связи. Если это соединение нормальное, то вызов переходит к этапу 332. В противном случае КПО направляет информационное сообщение, уведомляющее о разъединении вызова, другому абоненту или в компанию связи на этапе 336 и выполняет операцию разъединения вызова на этапе 338.
При этом, если у таймера, установленного на Timer_Val2 (например, от 30 до 60 секунд), время истекло без приема сигнала запроса на повторное соединение "Повторное соединение" от МС на этапе 334, то КПО направляет информационное сообщение, уведомляющее о разъединении вызова, другому абоненту или в компанию связи на этапе 336 и выполняет операцию разъединения вызова на этапе 338.
Хотя ВС, на фиг.10, направляет сигнал "Команда повторного соединения" при DROP= 1 в МС, сигнал "Команда повторного соединения" можно заменить сигналом "Повторное соединение". В этом случае этапы 310, 312 и 324 можно не выполнять.
Третье осуществление: обработка прерывания вызова обнаруженного МС и системой
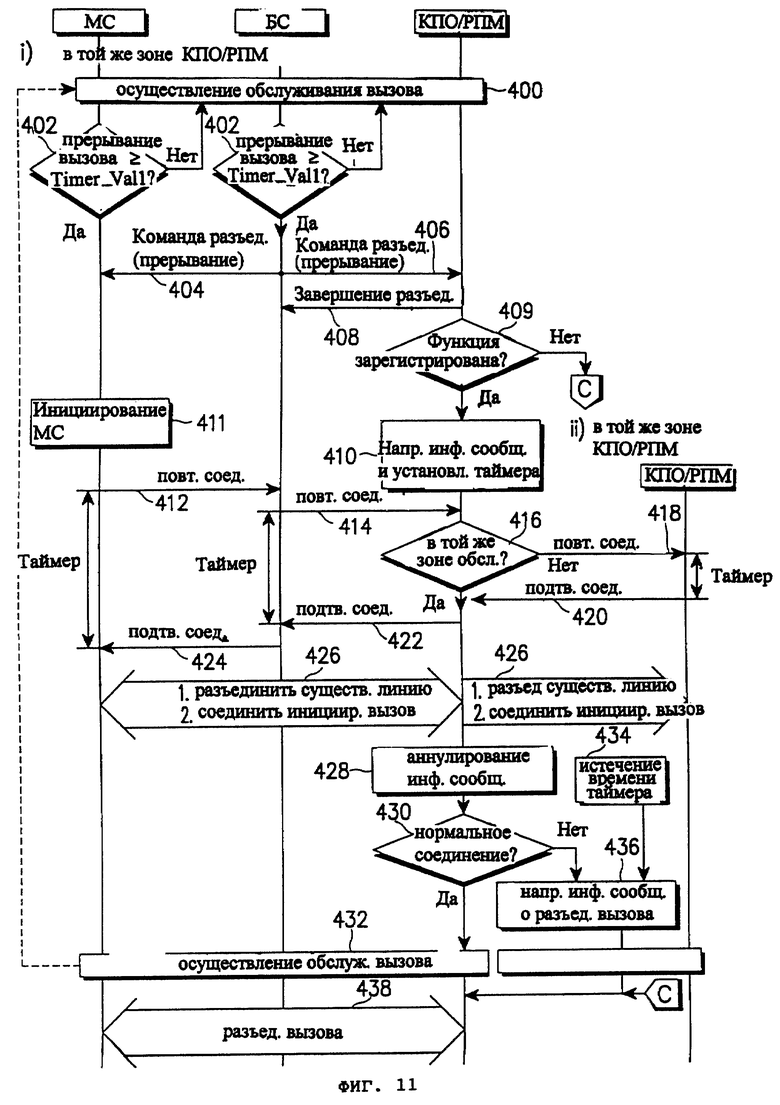
Фиг. 11 представляет схему последовательности операций обработки прерванного вызова, обусловленного двухсторонними неисправными каналами нагрузки между МС и системой.
Обращаясь к фиг.1 и 11: если вызов прерван по причине отсутствия приема циклов во время вызова на этапе 400, то БС и МС определяют, длится ли состояние прерывания вызова столько же или дольше заданного времени Timer_Val1 на этапах 401 и 402 соответственно.
Если это так, то БС направляет сигнал "Команда повторного соединения" с параметром RELEASE_ STAT, установленным на единицу (DROP=1), в МС на этапе 404 и сигнал "Разъединение" с параметром RELEASE_STAT, установленным на единицу (DROP=1), в КПО на этапе 406. Затем выполняют этапы 406 и 438. Эти этапы не описываются, поскольку они аналогичны этапам 306-338 фиг.10.
Четвертое осуществление: обработка прерывания вызова согласно запросу на регистрацию местоположения
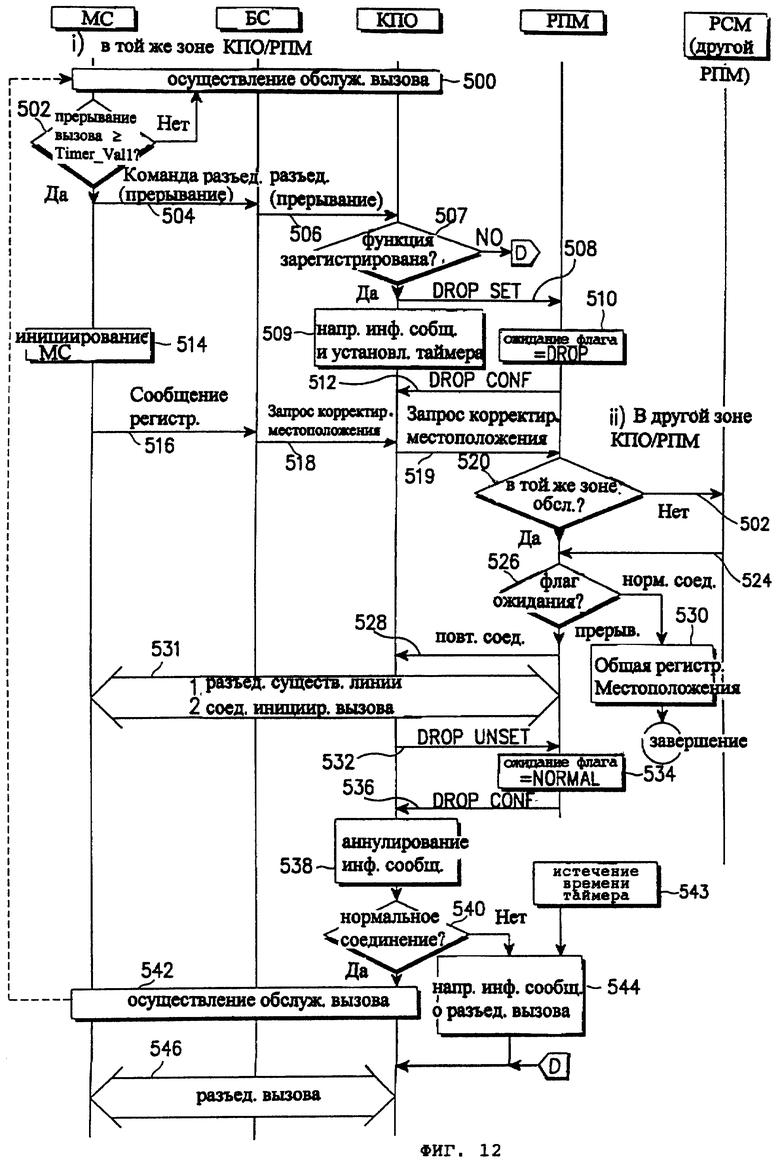
Фиг. 12 представляет последовательность операций обработки прерывания вызова, когда МС обнаруживает прерывание вызова и запрос на регистрацию местоположения. Это происходит в том случае, когда МС переходит в нормальное состояние без информации о местоположении, обусловленного прерыванием вызова, после прерывания вызова, резервирует регистрацию местоположения в системе по причине прерывания вызова.
Обращаясь к фиг.1 и 12: если вызов прерван по причине отсутствия приема циклов во время вызова на этапе 500, то МС определяет, на этапе 502, длится ли состояние прерывания вызова столько же, или дольше заданного времени. Если длительность превышает Timer_ Val1, то МС направляет сигнал "Команда разъединения" с параметром RELEASE_STAT, установленным на единицу (DROP=1), в БС на этапе 504, и БС направляет сигнал "Разъединение" с параметром RELEASE_ STAT, установленным на единицу (DROP=1), в КПО на этапе 506. На этапе 507 КПО определяет, зарегистрирована ли функция повторного соединения вызова единообразно для всех МС, или в качестве дополнительного вида обслуживания для отдельной МС, и затем определяет, зарегистрирована ли функция повторного соединения, если она отдельно обеспечивается в качестве дополнительного вида обслуживания, в целях выполнения для МС, путем анализирования параметра DCAR_ FLAG, запомненного в РПМ. Если функция повторного соединения вызова не зарегистрирована ни для всеобщего вида обслуживания, ни для отдельного вида обслуживания, то на этапе 546 выполняют операцию разъединения вызова.
Если функция повторного соединения вызова зарегистрирована, то КПО направляет сигнал "DROP SET" в свой РПМ на этапе 508, и РПМ устанавливает параметр WAITING FLAG, указывающий нормальное разъединение вызова или разъединение вызова, обусловленное прерванным вызовом, на DRP=1 на этапе 510. Затем РПМ направляет в КПО сигнал DROP CONF, представляющий подтверждение прерывания, на этапе 512.
При этом КПО направляет сообщение, уведомляющее об ожидании повторного соединения, другому абоненту или в компанию связи и приводит в действие таймер путем установки таймера на Timer_Val2, на этапе 509.
На этапе 514 инициируют МС, которая направила сигнал "Команда разъединения" с параметром RELEASE_STAT, установленным на единицу (DROP=1), в БС. Этот этап можно не выполнять. После этапа 511, если прерывание вызова устранено в связи с изменение местоположения МС, то МС на этапе 516 направляет сигнал "Сообщение регистрации" запроса на регистрацию местоположения в БС. Срабатывая на этот сигнал, БС направляет сигнал "Запрос корректировки местоположения" в КПО на этапе 518, и КПО направляет принятый сигнал в РПМ на этапе 519. Затем РПМ на этапе 520 определяет, находится ли данная МС в пределах зоны обслуживания РПМ. Если не находится, то РПМ запрашивает у РСМ или у другого РПМ определить, переходит ли вызов в МС, на этапе 522, и принимает ответное сообщение для запроса на этапе 524. Наоборот, если данная МС находится в пределах зоны обслуживания РПМ, то РПМ проверяет параметр WAITING_ FLAG для МС на этапе 526. Если этот параметр установлен на нуль, то РПМ выполняет общую процедуру регистрации местоположения на этапе 530. Если данный параметр установлен на единицу, то РПМ направляет сигнал "Повторное соединение" в КПО на этапе 528.
На этапе 531 КПО разъединяет имеющиеся линии связи и соединяет инициированный вызов. Если данная МС находится в зоне обслуживания того же КПО, то устанавливают исходящий вызов, и имеющиеся линии связи разъединяют, и инициированный вызов соединяют таким же образом, как и аппаратурно-реализованную сдачу вызова между БС. С другой стороны, если МС находится в пределах зоны обслуживания разных КПО, то тогда устанавливают исходящий вызов, и существующие линии связи разъединяют, и инициированный вызов соединяют аналогичным образом, как и в случае аппаратурно-реализованной сдачи между КПО.
На этапе 532 КПО направляет сигнал DROP UNSET в РПМ, и на этапе 534 РПМ изменяет параметр WAITING FLAG на нуль. Затем РПМ направляет сигнал DROP CONF в КПО на этапе 536. На этапе 538 КПО аннулирует информационное сообщение об ожидании повторного соединения, и на этапе 540 определяет, совершено ли нормальное соединение инициированного вызова с другим абонентом или компанией связи. Если это соединение нормальное, то вызов переходит к этапу 542. В противном случае КПО направляет информационное сообщение, уведомляющее о разъединении вызова, другому абоненту или компании связи на этапе 544 и выполняет операцию разъединения вызова на этапе 546.
При этом, если у таймера, установленного на Timer_Val2 (например, от 30 до 60 секунд), время истекло без приема сигнала запроса на повторное соединение "Повторное соединение" от МС на этапе 543, то КПО направляет информационное сообщение, уведомляющее о разъединении вызова, другому абоненту или компании связи на этапе 544, и выполняет операцию разъединения вызова на этапе 546.
Фиг. 13 и 14 иллюстрируют переходы состояния обработки вызова как согласно обычному способу, так и в соответствии с данным изобретением.
Согласно фиг.13 при запросе на разъединение вызова или после прерывания вызова в течение заданного периода времени, составляющее, например, 5 секунд, в известном уровне техники вводят состояние разъединения вызова. В противоположность известному уровню техники, согласно фиг.4, при прерывании вызова в течение первого времени (например, 1,2 секунды) во время обслуживания вызова в соответствии с данным изобретением вводят режим молчания. Но если прерывание вызова происходит во второй раз (например, в течение от 30 до 60 секунд) в режиме молчания, то вводят состояние разъединения вызова. Если запрос на вызов запрошен во время разговора или во время режима молчания, то немедленно вводится состояние разъединения вызова.
Как указывалось выше, данное изобретение имеет то преимущество, что неудобство возобновления временного прерванного вызова в лифте или туннеле устраняют за счет обеспечения функции автоматического повторного соединения прерванного вызова в НТСОП. Таким образом абонентов избавляют от забот, связанных с прерываниями вызова; при этом можно повысить качество обслуживания.
Несмотря на то, что данное изобретение подробно описывается здесь со ссылкой на конкретные варианты осуществления, они являются только примерами осуществлении. То есть подразумевается, что специалист данной области сможет произвести многие изменения в рамках диапазона и концепции данного изобретения.
Изобретение относится к способу повторного соединения вызова, прерванного из-за помехи обслуживанию во время обслуживания между абонентом мобильной станции (МС) и другой стороной, осуществляющей связь с указанным абонентом МС посредством системы связи с подвижными объектами, имеющую некоторое множество подключенных друг к другу центров коммутации подвижных объектов (КПО), причем каждый КПО подключен к некоторому множеству базовых станций (БС). Если помеха обслуживанию длится по меньшей мере в течение заданного первого периода времени, то абонент МС направляет сигнал запроса на повторное соединение. Затем обслуживание повторно инициируют между абонентом МС и другой стороной через одну БС из указанного множества БС и один из КПО, подключенный к БС, в ответ на сигнал запроса на повторное соединение. Технический эффект, достигаемый при реализации заявленного способа, состоит в обеспечении возобновления временного прерванного вызова за счет обеспечения автоматического повторного соединения прерванного вызова. 5 с. и 32 з.п. ф-лы, 16 ил.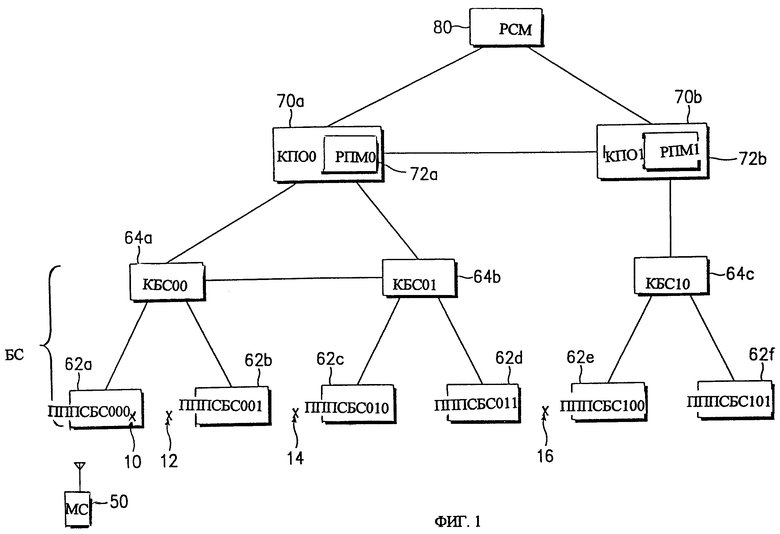
| СИСТЕМА СВЯЗИ | 1991 |
|
RU2099881C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ПОТЕРИ ВЫЗОВА ПРИ ПЕРЕРАСПРЕДЕЛЕНИИ КАНАЛА СВЯЗИ В РАДИОТЕЛЕФОННОЙ СИСТЕМЕ | 1995 |
|
RU2105418C1 |
| ЕР 0526240 А2, 03.02.1993 | |||
| US 5544224 А, 06.08.1996. | |||

