Изобретение относится к области хирургической стоматологии и связано с оптимальным размещением дентальных имплантатов.
Известно, что при реабилитации больных с использованием имплантатов рентгеновские снимки не всегда адекватно обеспечивают оценку тканей в зоне введения имплантата. Полученные изображения костных структур челюстей имеют искаженные формы, поэтому определение истинных размеров кости остается трудной и не всегда выполнимой задачей. Методы рентгенографии и ортопантомографии при оценке величин костных структур несовершенны, так как требуют больших затрат, длительности проведения исследований, подвергают организм пациента значительной лучевой нагрузке.
В ортопедической стоматологии используется стереометрический метод, разновидностью которого является стереофотограмметрический, изучающий объемные формы по стереопаре фотоснимков, основанный на использовании стереоскопического эффекта, с последующей обработкой полученных стереопар.
Робот для хирургических операций в стоматологии, разработанный в Берлинском техническом университете, позволяет решать задачи восстановительной хирургии и имплантологии на основе использования компьютерно-томографических изображений и специальной лазерной навигационной системы с нанесением маркерных отметок на лицо пациента (Lueth Т., Hein A., Albrecht J., et al. A surgical system for maxillofacial surgery // IEEE Int. Conf. On Industrial electronics, control and instrumentation (IECON), Aachen, Germany, 1998, PP. 2470-2475).
Для рационального размещения дентальных имплантатов используется система виртуальной реальности (Seipel S., Wagner I.-V., Koch S. Schneide W. Oral implant treatment in virtual reality environment // Computer Methods and Programs in Biomedicine, 57, 1998, PP. 95-103). На основе интерактивного взаимодействия исследователя автоматизированная система обеспечивает возможность манипуляции с цифровыми компьютерными моделями верхней и нижней челюстей, восстановленных по данным компьютерной томографии, и виртуальными имлантатами в режиме реального времени в пространстве с 6 степенями свободы с учетом индивидуальных особенностей костных структур пациента. Использовались специализированная навигационная система и стереоскопическая система визуализации объема.
Использование трехмерных моделей и систем виртуального позиционирования, основанных на компьютерно-томографических изображениях и их реконструкции, очень дороги и не могут рассматриваться для отечественных условий в качестве приемлемого решения.
Для измерения дентальных параметров кости Агеенко А.М. (Зубоврачебный вестник 2, 1993) предложил методику, которая основана на использовании перед рентгенографией диагностической базисной пластинки. В области предполагаемого размещения имплантатов в пластмассовый базис ввариваются металлические шарики известного диаметра. После изготовления базисной пластинки производится ее припасовка в полости рта, и больного направляют на ортопантомографию. Суть методики Агеенко А.М. - получение на ортопантомограмме объектов с заведомо определенным размером (в данном случае шарики) в непосредственной близости от области предполагаемой имплантации. Использование в качестве сравнительного исследуемого объекта шарика связано с тем, что независимо от проекции его диаметр остается постоянным.
Принципиальным недостатком методики Агеенко А.М. является ограниченность анализа области дентальной имплантации только двумерным рентгеновским снимком, что не позволяет оценить истинную пространственную структуру.
Задача, на решение которой направлено предлагаемое изобретение, - оптимальное размещение дентальных имплантатов при проведении хирургического вмешательства, основанное на повышении точности позиционирования, удобства интерпретации снимков и сокращении времени принятия решений об инсталляции имплантата.
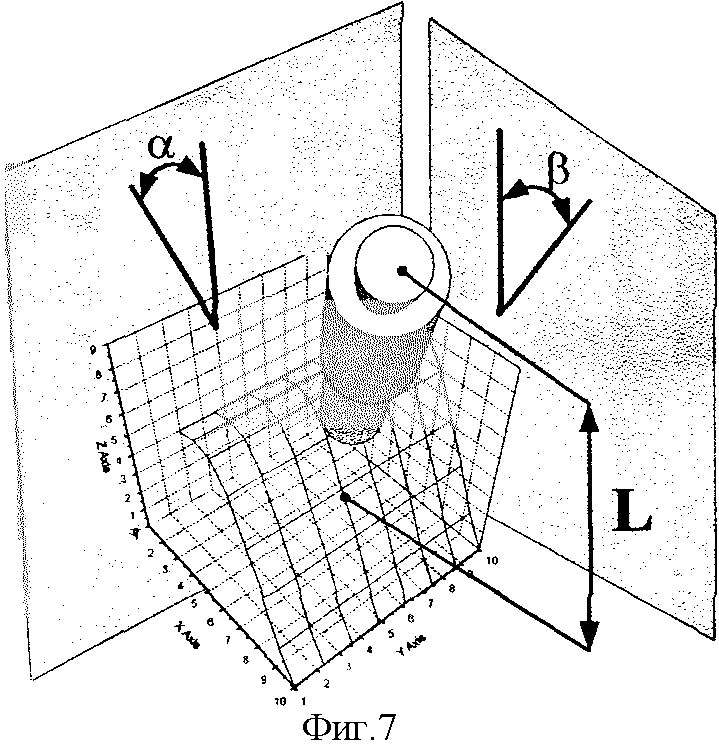
Это достигается тем, что способ измерения метрических характеристик области дентальной имплантации и позиционирования дентальных имплантатов включает измерение метрических характеристик области дентальной имплантации с использованием специальной каппы с размещенными на ней фрагментами сетки с заранее известными метрическими характеристиками, каппу размещают в полости рта пациента и производят, по крайней мере, два радиовизиографических снимка, которые реконструируются методами фотограмметрии в трехмерный объект и на нем устанавливают оптимальное положение имплантата, определяя метрические величины его размещения (глубину и соответствующие углы введения).
Традиционная радиовизиографическая система, например, фирмы "TROPHY" при проведении дентальных обследований предполагает использование интраорального регистратора на основе ПЗС-матрицы и источника рентгеновского излучения. Однако принципиальным недостатком имеющихся методик обследования является отсутствие возможности восстановления истинной трехмерной картины области дентальной имплантации и координатной привязки положения рентгеновского излучателя для воспроизведения повторных снимков в одинаковом ракурсе. Например, при хронологической оценке степени остеоинтеграции дентального имплантата необходимо осуществить снимки в одном положении для их качественного и количественного сравнения.
Способ осуществляется следующим образом.
Изготавливается каппа, на которой размещаются фрагменты сетки с заранее известными метрическими характеристиками.
Измерение метрических характеристик осуществляется либо 1) с помощью автоматизированной дентальной измерительной лазерной системы фирмы "Krupp" или 2) при помощи фотографирования цифровой камерой с находящимся в кадре эталоном длины. Во втором случае дополнительно определяется калибровочный коэффициент мм/пиксель после детального увеличения средствами компьютера.
Для регистрации снимков используется радиовизиографическая система фирмы "Trophy". Производятся два или три радиовизиографических снимка под различными углами к участку дентальной имплантации. Результаты записываются в файлы.
В основу реконструкции положен метод фотограмметрии, предполагающий производство как минимум двух снимков интересующей области под разными углами. Методом фотограмметрии восстанавливается по проекциям трехмерная структура сетки, а после указания эталонных точек - происходит реконструкция в нормализованных калиброванных координатах (мм).
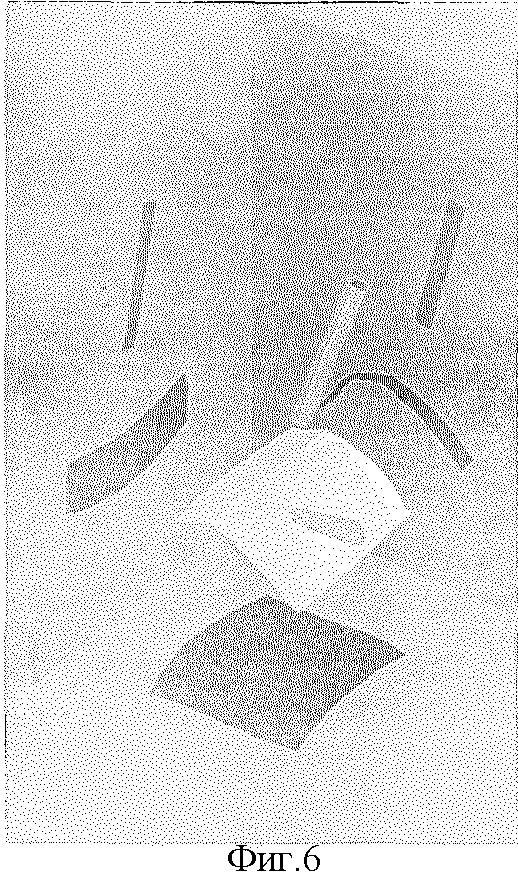
Далее трехмерный объект анализируется программной системой, позволяющей на основе цифрового моделирования сетки, расположенной на каппе и передающей рельеф костных структур, установить положение имплантата с учетом анатомически важных ориентиров (нижнечелюстной канал, верхнечелюстная пазуха). К трехмерному объекту подводится модель имплантата, и оцениваются по проекциям величины искажений и глубина введения.
Окончательно после выбора оптимального положения происходит наложение графической модели на реальные снимки для подтверждения.
Пример. Больной Ф., 45 лет. Имеет концевой дефект слева на нижней челюсти. Принято решение об инсталляции цилиндрического имплантата IMZ.
Основные результаты выполнения этапов представлены на фигурах.
На фиг.1 представлен радиовизиографический снимок области дентальной имплантации больного Ф.
На фиг.2 представлена соответственно каппа с фрагментами сетки.
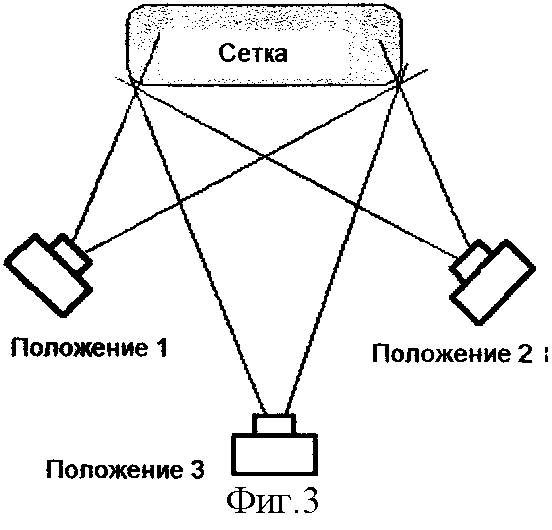
На фиг.3 представлены три положения рентгеновской головки при регистрации области дентальной имплантации.
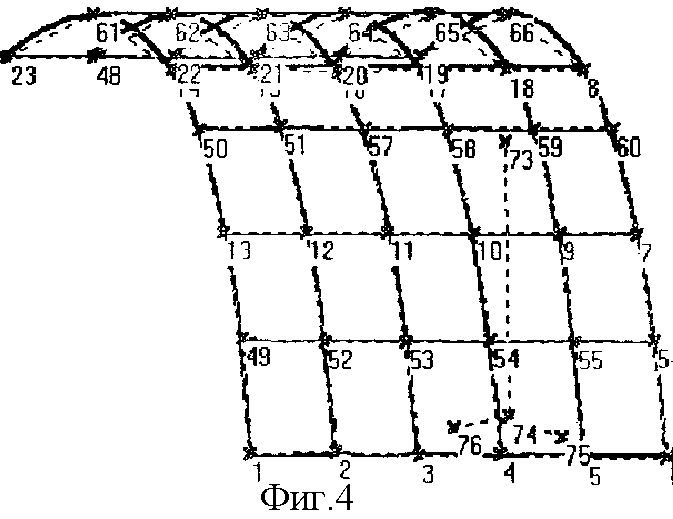
На фиг.4 представлена проекция реконструированной сетки с промаркированными и эталонными узлами.
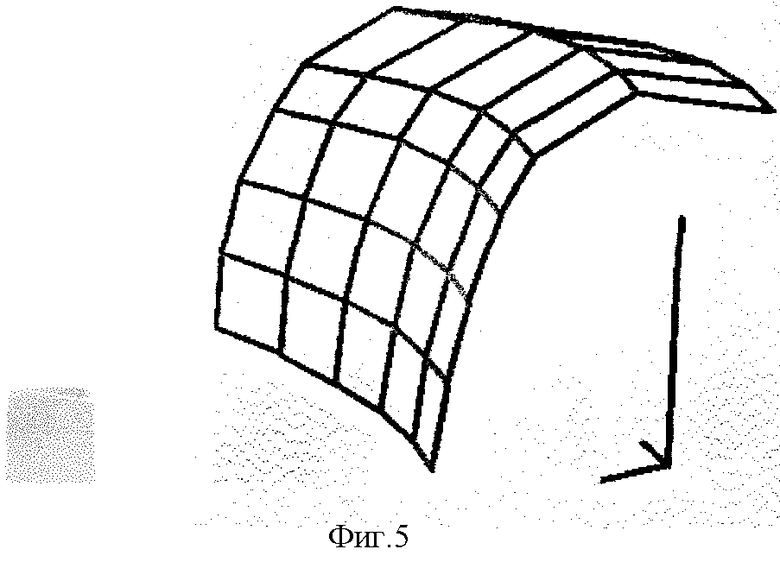
На фиг.5 представлена реконструированная модель сетки в нормализованных координатах и два положения рентгеновской головки при производстве снимков.
На фиг.6 представлена реконструированная трехмерная картина области дентальной имплантации с отображением трех проекций положения имплантата.
На фиг.7 - принципиальная схема с обозначением углов и глубины введения.
Таким образом, способ позволяет хирургу-стоматологу осуществить процесс позиционирования имплантата, основанный на трехмерной реконструкции дентальной области методом фотограмметрии по радиовизиографическим снимкам. Трехмерная реконструкция позволяет значительно повысить наглядность принятия решений, объективизировать анализ расположения имплантата и рационализировать выбор параметров его введения (глубины и углов одновременно).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИКИ ВЕЛИЧИН КОСТНЫХ СТРУКТУР ЧЕЛЮСТЕЙ В ХИРУРГИЧЕСКОЙ СТОМАТОЛОГИИ | 2004 |
|
RU2252726C1 |
| Способ изготовления адаптированных дентальных имплантатов | 2019 |
|
RU2716460C1 |
| Способ непосредственной дентальной имплантации | 2016 |
|
RU2636893C1 |
| Стоматологический робот | 2018 |
|
RU2700542C1 |
| Способ одномоментной дентальной имплантации | 2023 |
|
RU2820001C1 |
| Навигационный шаблон для дентальной имплантации с каналом для ирригации операционного поля | 2021 |
|
RU2758099C1 |
| СПОСОБ ДЕНТАЛЬНОЙ ИМПЛАНТАЦИИ | 2018 |
|
RU2688447C1 |
| СПОСОБ ДЕНТАЛЬНОЙ ИМПЛАНТАЦИИ (ВАРИАНТЫ) | 2012 |
|
RU2519630C2 |
| Способ прогнозирования результата дентальной имплантации | 2017 |
|
RU2651763C1 |
| Способ прогнозирования результата дентальной имплантации | 2017 |
|
RU2657442C1 |
Изобретение относится к хирургической стоматологии, в частности к оптимальному размещению дентальных имплантатов. Способ включает измерение метрических характеристик области дентальной имплантации на основе объектов с заранее определенными размерами и использованием π-каппы с размещенными на ней фрагментами сетки с заранее известными размерами, которую размещают в полости рта пациента. После этого производят, по крайней мере, два радиовизиографических снимка, которые реконструируют методами фотограмметрии в трехмерный объект и на нем устанавливают оптимальное положение имплантата, определяя метрические величины его размещения (глубину, углы введения). Это позволяет повысить точность позиционирования, удобство интерпретации снимков и сократить время принятия решений об инсталляции имплантата. 7 ил.
Способ измерения характеристик области дентальной имплантации и позиционирования дентальных имплантатов на основе объектов с заранее определенными размерами, отличающийся тем, что в качестве такого объекта используют каппу с размещенными на ней фрагментами сетки с известными размерами, производят, по крайней мере, два радиовизиографических снимка, которые реконструируют методами фотограмметрии в трехмерный объект, трехмерный объект анализируют, к нему подводят модель имплантата и по проекциям величин искажений определяют метрические величины размещения имплантата (глубина, углы введения).
| СУРОВ О.Н | |||
| Зубное протезирование на имплантатах | |||
| - М.: Медицина, 1993, с.109-117, 121-129 | |||
| ЩЕРБАКОВ А.С | |||
| и др | |||
| Ортопедическая стоматология | |||
| - Спб, ИКФ "Фолиант", 1998, с.176-178 | |||
| Зубоврачебный вестник, 1993, № 2. |

