Изобретение относится к радионавигации, а именно к способам определения местоположения подвижных объектов.
Известен угломерно-дальномерный способ определения координат цели в радиолокационных системах с активным ответом (см., например, Теоретические основы радиолокации. Под ред. В.Е.Дулевича. - М.: Советское радио, 1978, с. 7-11), заключающийся в том, что с радиолокационной станции осуществляют ненаправленное излучение запросных радиосигналов, на цели осуществляют прием этих запросных радиосигналов и излучение ответных радиосигналов, на указанной радиолокационной станции осуществляют направленный прием ответных радиосигналов, по времени запаздывания и направлению распространения принимаемых ответных радиосигналов определяют дальность до цели и угол между заданным направлением и направлением на цель, по полученным значениям на указанной радиолокационной станции определяют координаты цели.
Указанный способ позволяет с высокой точностью измерять координаты целей при распространении радиоволн в свободном пространстве. Однако при измерении координат удаленных целей способ требует применения на радиолокационных станциях и на целях радиопередающих устройств высокой мощности, что значительно усложняет техническую реализацию способа.
Известен способ определения местоположения подвижного объекта в системах сотовой радиосвязи (см., например, Ратынский М.В. Основы сотовой связи. Под ред. Д. Б.Зимина. - М.: Радио и связь, 2000, с.20-68), заключающийся в том, что в центрах условных ячеек, представляющих собой равные правильные шестиугольники, плотно покрывающие обслуживаемую территорию, размещают базовые станции с радиусами зон действия, равными длине стороны каждого правильного шестиугольника, и с заданным на каждой базовой станции уникальным идентификационным номером, с одного из подвижных объектов, находящихся в пределах обслуживаемой территории, осуществляют излучение позывных радиосигналов на заданных рабочих частотах, эти позывные радиосигналы принимают на базовых станциях, в зонах действия которых находится позиционируемый подвижный объект, с этих базовых станций в центр коммутации передают по оптоволоконным линиям связи информационные оптические сигналы, содержащие идентификационные номера указанных базовых станций, в центре коммутации по полученным информационным оптическим сигналам определяют местоположение позиционируемого подвижного объекта.
Указанный способ позволяет при большом количестве базовых станций обеспечить приемлемую точность определения местоположения подвижных объектов, находящихся в пределах достаточно обширной обслуживаемой территории, не требуя при этом применения на подвижных объектах радиопередающих устройств высокой мощности.
Однако, поскольку определение местоположения позиционируемого подвижного объекта осуществляют только по идентификационным номерам базовых станций, в зонах действия которых находится этот позиционируемый подвижный объект, без использования информации о координатах размещения и значениях радиусов зон действия этих базовых станций, способ позволяет лишь определять идентификационные номера базовых станций, в зонах действия которых находится позиционируемый подвижный объект, без определения области обслуживаемой территории, в которой находится позиционируемый подвижный объект, что значительно снижает точность определения местоположения позиционируемого подвижного объекта в системе координат, связанной с какой-либо точкой обслуживаемой территории.
Вместе с тем, поскольку размещение базовых станций осуществляют в центрах условных ячеек, представляющих собой равные правильные шестиугольники, плотно покрывающие обслуживаемую территорию, причем радиусы зон действия базовых станций равны длине стороны каждого правильного шестиугольника, расстояние между двумя любыми соседними базовыми станциями в  раз больше радиусов зон их действия. В связи с этим зоны действия соседних базовых станций перекрываются лишь в области их границ, что значительно снижает точность определения местоположения подвижных объектов, находящихся на центральных участках зон действия базовых станций.
раз больше радиусов зон их действия. В связи с этим зоны действия соседних базовых станций перекрываются лишь в области их границ, что значительно снижает точность определения местоположения подвижных объектов, находящихся на центральных участках зон действия базовых станций.
Кроме того, способ предусматривает определение местоположения подвижного объекта только в центре коммутации и не позволяет определять местоположение позиционируемого подвижного объекта на других подвижных объектах, находящихся в пределах обслуживаемой территории, и на базовых станциях без использования центра коммутации, что значительно ограничивает возможности способа.
Более того, при передаче с базовых станций, в зонах действия которых находится позиционируемый подвижный объект, информации об идентификационных номерах этих базовых станций, способ предусматривает применение оптоволоконных линий связи, исключающих возможности непосредственной передачи соответствующих информационных радиосигналов на подвижные объекты, находящиеся в пределах обслуживаемой территории, и на базовые станции, а следовательно, исключающих возможности определения на них местоположения позиционируемого подвижного объекта без использования центра коммутации, что, как указывалось, значительно ограничивает возможности способа.
Решаемой технической задачей является повышение точности определения местоположения подвижных объектов и расширение возможностей способа на основе рационального размещения базовых станций на обслуживаемой территории.
Решение технической задачи в способе определения местоположения подвижного объекта, заключающемся в том, что в условных ячейках, представляющих собой равные правильные шестиугольники, плотно покрывающие обслуживаемую территорию, размещают базовые станции с радиусами зон действия, равными длине стороны каждого правильного шестиугольника, и с заданным на каждой из этих базовых станций уникальным идентификационным номером, с позиционируемого подвижного объекта, являющегося одним из подвижных объектов, находящихся в пределах обслуживаемой территории, осуществляют излучение позывных радиосигналов на заданной рабочей частоте, эти позывные радиосигналы принимают на базовых станциях, в зонах действия которых находится позиционируемый подвижный объект, с этих базовых станций передают информационные сигналы, содержащие идентификационные номера указанных базовых станций, по этим информационным сигналам определяют местоположение позиционируемого подвижного объекта, достигается тем, что размещение базовых станций осуществляют в вершинах указанных правильных шестиугольников, передаваемыми информационными сигналами, содержащими идентификационные номера базовых станций, в зонах действия которых находится позиционируемый подвижный объект, являются соответствующие информационные радиосигналы, передачу информационных радиосигналов с указанных базовых станций осуществляют на подвижные объекты, находящиеся в пределах обслуживаемой территории, задают шесть различных рабочих частот информационных радиосигналов, излучаемых со всех базовых станций, из шести заданных рабочих частот на каждой базовой станции, размещаемой в вершине правильных шестиугольников, задают одну рабочую частоту информационных радиосигналов, излучаемых с этой базовой станции, отличную от рабочих частот информационных радиосигналов, излучаемых с соседних базовых станций, являющихся базовыми станциями, размещаемыми в соседних вершинах этих правильных шестиугольников, из шести заданных рабочих частот на каждом подвижном объекте задают пять различных рабочих частот информационных радиосигналов, принимаемых на этом подвижном объекте, на каждой из базовых станций и на подвижных объектах, находящихся в пределах обслуживаемой территории, задают дополнительно координаты размещения всех базовых станций, а также соответствующие им заданные идентификационные номера и радиусы зон действия всех базовых станций, передача информационных радиосигналов с базовых станций, в зонах действия которых находится позиционируемый подвижный объект, на подвижные объекты, находящиеся в пределах обслуживаемой территории, состоит в том, что вначале с одной из этих базовых станций осуществляют излучение информационных радиосигналов на заданной рабочей частоте, на всех базовых станциях, являющихся соседними по отношению к указанной базовой станции, осуществляют прием излучаемых с последней базовой станции информационных радиосигналов и их излучение на соответствующих заданных рабочих частотах, затем на всех других базовых станциях, являющихся соседними по отношению к указанным базовым станциям, осуществляют прием излучаемых с указанных базовых станций информационных радиосигналов и их излучение на соответствующих заданных рабочих частотах, затем таким же образом последовательно, по всем направлениям от указанной базовой станции, в зоне действия которой находится позиционируемый подвижный объект, к границам обслуживаемой территории на всех других последующих базовых станциях, являющихся соседними но отношению к предыдущим базовым станциям, осуществляют прием излучаемых с предыдущих базовых станций информационных радиосигналов и их излучение на соответствующих заданных рабочих частотах, затем осуществляют аналогичным образом поочередно передачу информационных радиосигналов со всех других базовых станций, в зонах действия которых находится позиционируемый подвижный объект, на подвижные объекты, находящиеся в пределах обслуживаемой территории, при этом излучение информационных радиосигналов на заданной рабочей частоте с каждой базовой станции, кроме базовой станции, идентификационный номер которой содержится в передаваемых информационных радиосигналах, осуществляют при приеме на этой базовой станции информационных радиосигналов одной из заданных на этой базовой станции рабочих частот, на подвижных объектах, находящихся в пределах обслуживаемой территории, осуществляют на заданных рабочих частотах прием информационных радиосигналов, передаваемых с каждой из базовых станций, в зонах действия которых находится позиционируемый подвижный объект, определение местоположения позиционируемого подвижного объекта осуществляют на подвижных объектах, находящихся в пределах обслуживаемой территории, и на базовых станциях по идентификационным номерам базовых станций, в зонах действия которых находится позиционируемый подвижный объект, а также по дополнительно заданным координатам размещения и радиусам зон действия этих базовых станций.
Термин "подвижный объект" является общепринятым. (См., например, Соловьев Ю. А. Системы спутниковой навигации. - М.: Эко-трендз, 2000, с. 47.) К подвижным объектам относят, например, различные автотранспортные средства, оснащенные радиоприемной аппаратурой. Под терминами "соседняя базовая станция" или "базовая станция, являющаяся соседней по отношению к данной базовой станции" понимаем базовые станции, размещаемые на ближайшем расстоянии от данной базовой станции.
На фиг.1 изображены условно базовые станции, размещенные на обслуживаемой территории, и подвижные объекты, находящиеся в пределах обслуживаемой территории, с условным изображением зон действия базовых станций и указанием заданных рабочих частот информационных радиосигналов, излучаемых с каждой из этих базовых станций, для случая, при котором число базовых станций равно пятидесяти четырем, число подвижных объектов равно пяти.
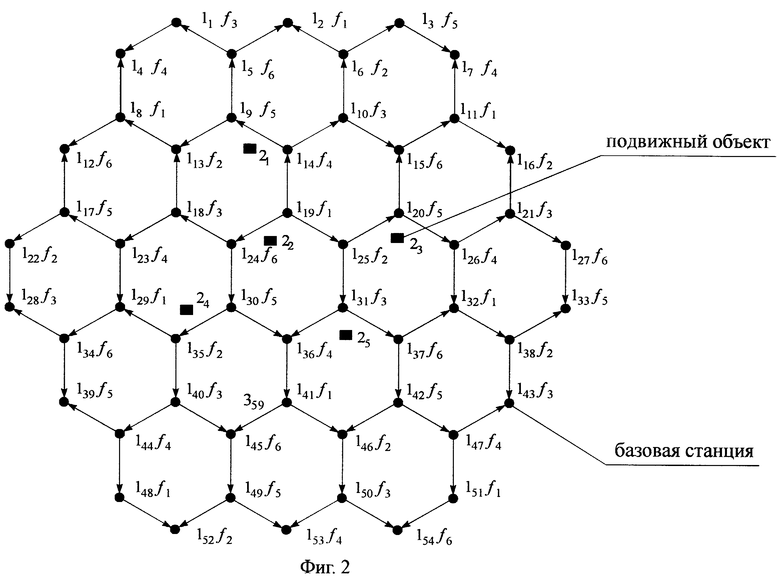
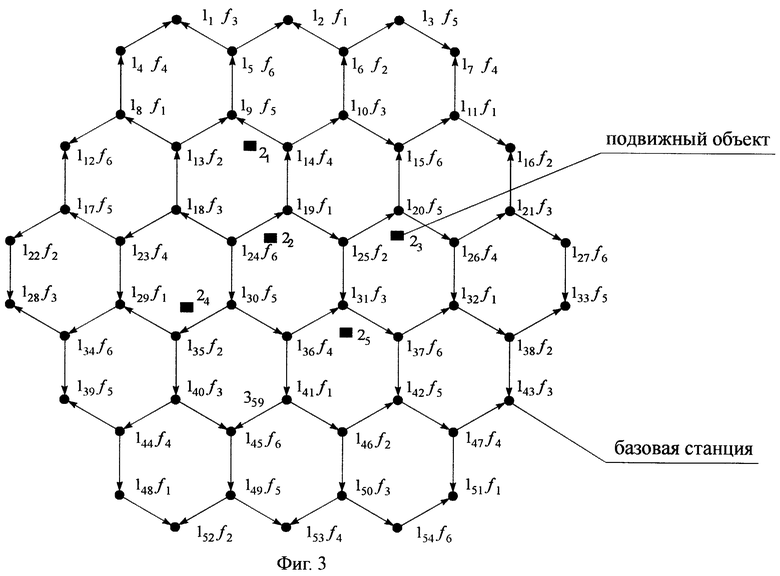
На фиг.2 и фиг.3 изображены условно базовые станции, размещенные на обслуживаемой территории, и подвижные объекты, находящиеся в пределах обслуживаемой территории, с указанием заданных рабочих частот информационных радиосигналов, излучаемых с каждой из этих базовых станций, а также с условным изображением направлений передачи информационных радиосигналов соответственно с каждой из базовых станций, в зонах действия которых находится позиционируемый подвижный объект, на другие базовые станции, для случая, при котором число базовых станций равно пятидесяти четырем, число подвижных объектов равно пяти.
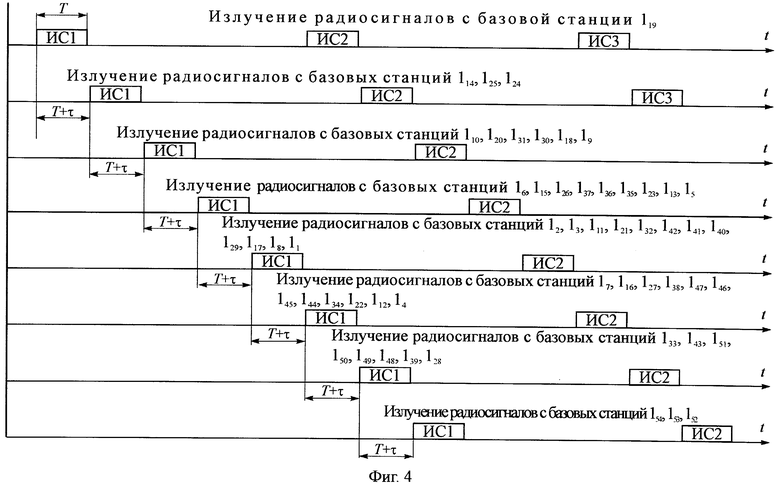
На фиг. 4 изображены условно временные диаграммы последовательной передачи информационных радиосигналов с одной из базовых станций, в зонах действия которых находится позиционируемый подвижный объект, на другие базовые станции.
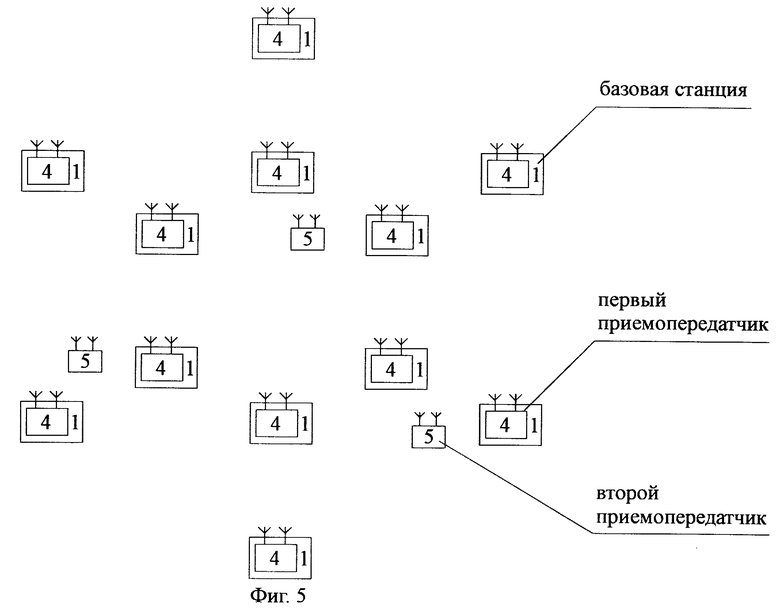
На фиг. 5 изображена система для осуществления способа для случая, при котором число первых приемопередатчиков, входящих по одному в состав каждой из базовых станций, равно двенадцати, и число вторых приемопередатчиков, размещенных по одному на каждом из подвижных объектов, равно трем, причем подвижные объекты на фиг.5 не изображены.
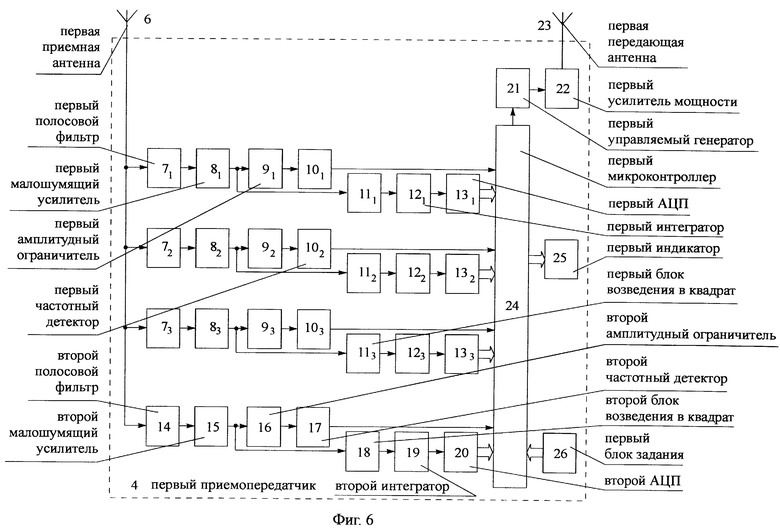
На фиг.6 изображен первый приемопередатчик, входящий в состав каждой из базовых станций, причем базовая станция на фиг.6 не изображена.
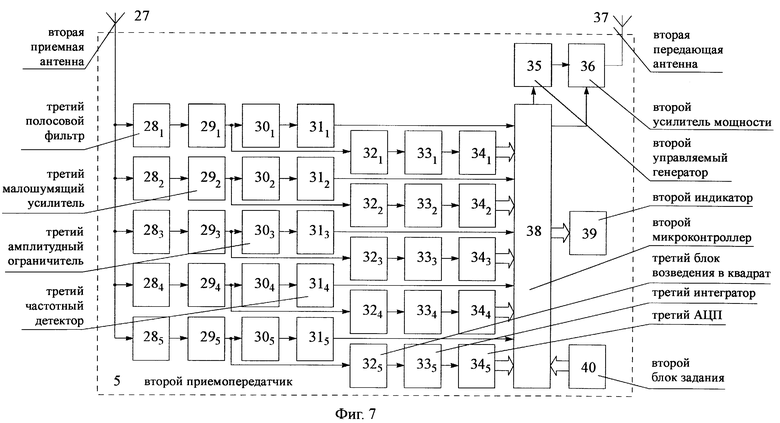
На фиг. 7 изображен второй приемопередатчик, размещенный на каждом из подвижных объектов, причем подвижный объект на фиг.7 не изображен.
В настоящем описании применены следующие обозначения.
1n - базовая станция 1 с уникальным идентификационным номером n, где n= 1,2, ...,N - положительные целые числа; 2n - подвижный объект 2 с номером m, где m= 1,2, ...,М - положительные целые числа; 3n - зона 3 действия базовой станции 1n; fq - рабочая частота информационных радиосигналов, излучаемых с базовой станции 1, где q=1,2,...,Q - положительные целые числа; fп - рабочая частота позывных радиосигналов, излучаемых с позиционируемого подвижного объекта 2. В тех случаях, когда это не приводит к неверному толкованию, индексы в приведенных обозначениях опущены.
Сущность способа заключается в следующем.
На обслуживаемой территории в вершинах условных ячеек, представляющих собой равные правильные шестиугольники, плотно покрывающие обслуживаемую территорию, размещают, как показано на фиг.1, базовые станции 1 (базовые станции 11-154) с радиусами зон 3 действия, равными длине стороны каждого правильного шестиугольника, и с заданным на каждой базовой станции 1 уникальным идентификационным номером (номера 11-154).
При таком размещении базовых станций 1 на обслуживаемой территории соседними по отношению к каждой базовой станции 1 являются не более трех базовых станций 1.
Под зоной 3 действия каждой базовой станции 1 понимаем равные между собой зону 3 действия при излучении радиосигналов с этой базовой станции 1 и зону 3 действия при приеме радиосигналов на этой базовой станции 1.
При этом под зоной 3 действия при излучении радиосигналов с каждой базовой станции 1 понимаем часть территории, в пределах которой при ненаправленном излучении с этой базовой станции 1 радиосигналов мощности Pqизл рабочей частоте fq мощность этих радиосигналов при их ненаправленном приеме на других базовых станциях 1 и на подвижных объектах 2 не меньше некоторой пороговой величины Pпр.мин, характеризующей чувствительность каналов приема радиосигналов на базовых станциях 1 и на подвижных объектах 2. Под зоной 3 действия при приеме радиосигналов на каждой базовой станции 1 понимаем часть территории, в пределах которой при ненаправленном излучении с других базовых станций 1 радиосигналов той же мощности Pqизл, на той же рабочей частоте fq, а также при ненаправленном излучении с позиционируемого подвижного объекта 2 радиосигналов мощности Pпизл на рабочей частоте fп мощность этих радиосигналов при ненаправленном приеме на этой базовой станции 1 не меньше той же величины Pпр.мин.
В связи с этим, принимая допущение о том, что распространение радиоволн происходит в свободном пространстве, а обслуживаемая территория является плоскостью, зона 3 действия каждой базовой станции 1 при ненаправленном излучении с базовых станций 1 и с позиционируемого подвижного объекта 2 и при ненаправленном приеме радиосигналов на базовых станциях 1 и на подвижных объектах 2 представляет собой круг с центром в точке размещения этой базовой станции 1 и радиусом, определяемым по формуле (см., например, Теоретические основы радиолокации. Под ред. В.Е. Дулевича. - М.: Советское радио, 1978, с. 402)
где с - скорость света в вакууме.
Под радиусом зоны 3 действия каждой базовой станции 1 понимаем радиус указанного круга.
При размещении базовых станций 1 в вершинах условных ячеек, представляющих собой равные правильные шестиугольники, плотно покрывающие обслуживаемую территорию, с радиусами зон 3 действия базовых станций 1, равными длине стороны каждого правильного шестиугольника, граница зоны 3 действия каждой базовой станции 1 проходит через точки размещения соседних базовых станций 1. На фиг.1 границы зон 3 действия базовых станций 1 изображены условно окружностями.
В настоящем описании под термином "мощность сигнала" понимаем среднюю мощность Р сигнала s(t), определяемую в интервале времени ta≤t≤tb, по формуле (см., например, А.М. Трахтман. Введение в обобщенную спектральную теорию сигналов. - М.: Советское радио, 1972, с. 14)
Задают шесть различных рабочих частот (Q=6) информационных радиосигналов, излучаемых со всех базовых станций 1. Из шести заданных рабочих частот на каждой базовой станции 1 задают, как показано на фиг.1, одну рабочую частоту информационных радиосигналов, излучаемых с этой базовой станции 1, отличную от заданных рабочих частот информационных радиосигналов, излучаемых с соседних базовых станций 1. Таким образом, на базовых станциях 1, не являющихся соседними, задают повторяющиеся рабочие частоты информационных радиосигналов, излучаемых с этих базовых станций 1.
Под термином "рабочая частота" понимаем значение частоты несущего колебания, центральное или какое-либо другое характерное значение частоты полосы частот радиосигналов. При этом полосы частот радиосигналов, соответствующие различным рабочим частотам, являются не перекрывающимися.
С позиционируемого подвижного объекта 2, являющегося одним из подвижных объектов 2, находящихся в пределах обслуживаемой территории, осуществляют излучение позывных радиосигналов на заданной рабочей частоте. Эти позывные радиосигналы принимают на базовых станциях 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2.
С этих базовых станций 1 передают на подвижные объекты 2, находящиеся в пределах обслуживаемой территории, информационные сигналы, содержащие идентификационные номера базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2. При этом информационными сигналами, соответствующими информации, передаваемой на подвижные объекты 2, находящиеся в пределах обслуживаемой территории, являются соответствующие информационные радиосигналы.
Передача информационных радиосигналов с базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, на подвижные объекты 2, находящиеся в пределах обслуживаемой территории, состоит в следующем. Вначале с одной из этих базовых станций 1 осуществляют излучение информационных радиосигналов на заданной рабочей частоте. На всех базовых станциях 1, являющихся соседними по отношению к указанной базовой станции 1, осуществляют прием излучаемых с последней базовой станции 1 информационных радиосигналов и их излучение на соответствующих заданных рабочих частотах. Затем на всех других базовых станциях 1, являющихся соседними по отношению к указанным базовым станциям 1, осуществляют прием излучаемых с указанных базовых станций 1 информационных радиосигналов и их излучение на соответствующих заданных рабочих частотах. Затем таким же образом последовательно, по всем направлениям от указанной базовой станции 1, в зоне 3 действия которой находится позиционируемый подвижный объект 2, к границам обслуживаемой территории на всех других последующих базовых станциях 1, являющихся соседними по отношению к предыдущим базовым станциям 1, осуществляют прием излучаемых с предыдущих базовых станций 1 информационных радиосигналов и их излучение на соответствующих заданных рабочих частотах. Затем осуществляют аналогичным образом поочередно передачу информационных радиосигналов со всех других базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, на подвижные объекты 2, находящиеся в пределах обслуживаемой территории.
Для обеспечения передачи информационных радиосигналов с каждой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, на подвижные объекты 2, находящиеся в пределах обслуживаемой территории, а следовательно, и на все другие базовые станции 1, без "зацикливания" из шести заданных рабочих частот на каждой базовой станции 1 задают рабочие частоты информационных радиосигналов, принимаемых на этой базовой станции 1, при которых с этой базовой станции 1 осуществляют излучение информационных радиосигналов на заданной рабочей частоте. При этом на каждой базовой станции 1 указанные рабочие частоты задают для любой другой базовой станции 1, в зоне 3 действия которой может находиться позиционируемый подвижный объект 2, в зависимости от взаимного расположения этих базовых станций 1 и значений заданных рабочих частот информационных радиосигналов, излучаемых с базовых станций 1, являющихся соседними по отношению к первой базовой станции 1.
На фиг. 2 и фиг.3 стрелками условно изображены направления передачи информационных радиосигналов соответственно с каждой из базовых станций 1 (базовые станции 1 с идентификационными номерами 119 и 124), в зонах 3 действия которых находится позиционируемый подвижный объект 2 (подвижный объект 22), на другие базовые станции 1.
Так, например, как показано на фиг.2, при передаче информационных радиосигналов с базовой станции 119, содержащих идентификационный номер этой базовой станции 1, излучение с базовой станции 131 информационных радиосигналов на заданной рабочей частоте f3 осуществляют при приеме на базовой станции 131 информационных радиосигналов заданной на этой базовой станции 1 рабочей частоты f2, являющейся рабочей частотой информационных радиосигналов, излучаемых с базовой станции 125. При этом с базовой станции 119 излучение информационных радиосигналов на заданной рабочей частоте f1 осуществляют независимо от значений рабочих частот информационных радиосигналов, излучаемых с соседних базовых станций 1, поскольку в приведенном примере передаваемые информационные радиосигналы содержат идентификационный номер базовой станции 119 , а следовательно, именно эта базовая станция 1 является источником передаваемой информации.
По аналогии с изложенным, как показано на фиг.3, при передаче информационных радиосигналов с базовой станции 124 излучение с базовой станции 131 информационных радиосигналов на заданной рабочей частоте f3 осуществляют при приеме на базовой станции 131 информационных радиосигналов заданных на этой базовой станции 1 рабочих частот f2 и f4, являющихся рабочими частотами информационных радиосигналов, излучаемых с базовых станций 125 и 136 соответственно.
Передача информационных радиосигналов с базовых станций 119 и 124, в зонах 3 действия которых находится позиционируемый подвижный объект 22, на подвижные объекты 2, находящиеся в пределах обслуживаемой территории, состоит в следующем. Вначале, как показано на фиг.2, с базовой станции 1 осуществляют излучение информационных радиосигналов, содержащих идентификационный номер этой базовой станции 1, на заданной рабочей частоте. При этом на всех базовых станциях 1 (базовые станции 114, 125, 124), являющихся соседними по отношению к базовой станции 119, осуществляют прием излучаемых с последней базовой станции 1 информационных радиосигналов и их излучение на соответствующих заданных рабочих частотах. Затем на всех других базовых станциях 1 (базовые станции 110, 120, 131, 130, 118, 19), являющихся соседними по отношению к указанным базовым станциям 1 (базовые станции 114, 125, 124), осуществляют прием излучаемых с указанных базовых станций 1 информационных радиосигналов и их излучение на соответствующих заданных рабочих частотах. Затем таким же образом последовательно, по всем направлениям от базовой станции 119, в зоне 3 действия которой находится позиционируемый подвижный объект 22, к границам обслуживаемой территории на всех других последующих базовых станциях 1 (вначале на базовых станциях 16, 115, 126, 137, 136, 135, 123, 113, 15, затем на базовых станциях 12, 13, 111, 121, 132, 142, 141, 140, 129, 117, 18, 11, затем на базовых станциях 17, 116, 127, 138, 147, 146, 145, 144, 134, 122, 112, 14, затем на базовых станциях 133, 143, 151, 150, 149, 148, 139, 128 и, наконец, на базовых станциях 154, 153, 152), являющихся соседними по отношению к предыдущим базовым станциям 1, осуществляют прием излучаемых с предыдущих базовых станций 1 информационных радиосигналов и их излучение на соответствующих заданных рабочих частотах.
Затем осуществляют, как показано на фиг.3, аналогичным образом передачу информационных радиосигналов с базовой станции 124, в зоне 3 действия которой находится позиционируемый подвижный объект 22, на подвижные объекты 2, находящиеся в пределах обслуживаемой территории. (При большем количестве базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, с каждой из этих базовых станций 1 осуществляют аналогичным образом поочередно передачу информационных радиосигналов на подвижные объекты 2, находящиеся в пределах обслуживаемой территории.)
Схемы, представленные на фиг.1 - 3, являются примерами размещения базовых станций 1 на обслуживаемой территории с радиусами зон 3 действия, равными длине стороны каждого правильного шестиугольника, и задания на каждой базовой станции 1 рабочей частоты информационных радиосигналов, излучаемых с этой базовой станции 1, а также задания на каждой базовой станции 1, кроме базовых станций 1, в зонах 3 действия которых находится подвижный объект 2, рабочих частот информационных радиосигналов, принимаемых на этой базовой станции 1, при которых с этой базовой станции 1 осуществляют излучение информационных радиосигналов на заданной рабочей частоте.
Временные диаграммы последовательной передачи информационных радиосигналов по всем направлениям от одной из базовых станций 1 (базовой станции 119), в зонах 3 действия которых находится позиционируемый подвижный объект 2, к границам обслуживаемой территории условно изображены на фиг.4. Здесь ИС1 и ИС2 - информационные радиосигналы; Т - длительность информационных радиосигналов; τ - время распространения радиосигналов от каждой базовой станции 1 до соседних базовых станций 1, определяемое по формуле
где R - радиус зон 3 действия базовых станций 1; с - скорость света в вакууме.
При указанных параметрах размещения на обслуживаемой территории базовых станций 1 с заданными радиусами зон 3 действия в каждой точке обслуживаемой территории перекрываются не менее двух зон 3 действия соседних базовых станций 1. Поскольку излучение информационных радиосигналов с соседних базовых станций 1 осуществляют на различных рабочих частотах, в каждую точку приема поступают информационные радиосигналы не менее двух различных заданных рабочих частот. (Так, например, как показано на фиг.1, подвижный объект 21 расположен в зонах 3 действия двух базовых станций 19 и 114, с которых осуществляют излучение информационных радиосигналов на рабочих частотах f5 и f4, соответственно. ) Поэтому для обеспечения гарантированного приема информационных радиосигналов на подвижных объектах 2 при их перемещении в пределах обслуживаемой территории прием информационных радиосигналов на каждом подвижном объекте 2 достаточно осуществлять лишь на пяти различных из шести заданных рабочих частот.
На подвижных объектах 2 осуществляют прием информационных радиосигналов, излучаемых с базовых станций 1, в зонах 3 действия которых находятся эти подвижные объекты 2. При этом прием информационных радиосигналов на подвижных объектах 2 осуществляют на заданных рабочих частотах, которыми на каждом подвижном объекте 2 являются пять различных из шести заданных рабочих частот.
На каждой из базовых станций 1 и на подвижных объектах 2, находящихся в пределах обслуживаемой территории, задают дополнительно координаты (xn, уn) размещения всех базовых станций 1, а также соответствующие им заданные идентификационные номера n и радиусы R зон 3 действия всех базовых станций 1. Для этого может быть использована прямолинейная система координат на плоскости, связанная с какой-либо точкой обслуживаемой территории.
Определение местоположения позиционируемого подвижного объекта 2 осуществляют на подвижных объектах 2, находящихся в пределах обслуживаемой территории, и на базовых станциях 1 по идентификационным номерам базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, а также по дополнительно заданным координатам размещения и радиусам зон 3 действия этих базовых станций 1.
Принимая допущение о том, что зоны 3 действия каждой базовой станции 1 представляют собой круг радиуса R, координаты (х, у) позиционируемого подвижного объекта 2 определяют из решения системы неравенств
где  - координаты размещения базовых станций 1 с идентификационными номерами n1, n2,...,nk,...,nK, в зонах 3 действия которых находится позиционируемый подвижный объект 2, где К - число этих базовых станций 1; причем 1≤k≤K; k, К - положительные целые числа, n1=1,2,.. .,N, n2=1,2,...,N, nk=1,2,...,N, nK=1,2,...N.
- координаты размещения базовых станций 1 с идентификационными номерами n1, n2,...,nk,...,nK, в зонах 3 действия которых находится позиционируемый подвижный объект 2, где К - число этих базовых станций 1; причем 1≤k≤K; k, К - положительные целые числа, n1=1,2,.. .,N, n2=1,2,...,N, nk=1,2,...,N, nK=1,2,...N.
Решением системы (4) является множество значений координат (x, у) точек, образующих область обслуживаемой территории, ограниченную фрагментами границ перекрывающихся зон 3 действия соседних базовых станций 1, в которых находится позиционируемый подвижный объект 2. При заданных радиусах зон 3 действия базовых станций 1 и параметрах размещения базовых станций 1 на обслуживаемой территории площадь области, определяемой формулой (4), не больше одной третьей части площади зоны 3 действия каждой базовой станции 1, что значительно повышает, по сравнению с прототипом, точность определения местоположения позиционируемых подвижных объектов 2, находящихся на центральных участках зон 3 действия базовых станций 1.
Для обеспечения работоспособности способа размещение базовых станций 1 вблизи границ обслуживаемой территории необходимо осуществлять так, чтобы в каждой точке обслуживаемой территории происходило перекрытие не менее двух зон 3 действия соседних базовых станций 1. Так, например, границей обслуживаемой территории, представленной на фиг.1, может являться замкнутая ломаная, проходящая через все крайние базовые станции 1 (базовые станции 11, 15, 12, 16, 13, 17, 111, 116, 121, 127, 133, 138, 143, 147, 151, 154, 150, 153, 149, 152, 148, 144, 139, 134, 128, 122, 117, 112, 18, 14).
Таким образом, благодаря тому, что определение местоположения позиционируемого подвижного объекта 2 осуществляют, в отличие от прототипа, не только по идентификационным номерам базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, но и на основе информации о координатах размещения и радиусах зон 3 действия этих базовых станций 1, способ позволяет определять область обслуживаемой территории, образованную фрагментами границ зон 3 действия базовых станций 1, в которой находится позиционируемый подвижный объект 2, что значительно повышает точность определения местоположения позиционируемого подвижного объекта 2 в системе координат, связанной с какой-либо точкой обслуживаемой территории. Вместе с тем благодаря тому, что размещение базовых станций 1, в отличие от прототипа, осуществляют не в центрах условных ячеек, представляющих собой равные правильные шестиугольники, плотно покрывающие обслуживаемую территорию, а в вершинах этих правильных шестиугольников, причем радиусы зон 3 действия всех базовых станций 1 равны длине стороны каждого правильного шестиугольника, расстояние между любыми двумя соседними базовыми станциями 1 равно радиусам зон 3 их действия. В связи с этим зоны 3 действия соседних базовых станций 1 значительно перекрываются, что существенно повышает точность определения местоположения подвижных объектов 2, находящихся на центральных участках зон 3 действия базовых станций 1. Более того, благодаря рациональному размещению базовых станций 1 на обслуживаемой территории при передаче с базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, информации об идентификационных номерах этих базовых станций 1 способ не требует применения центра коммутации и оптоволоконных линий связи и позволяет с помощью радиопередающей аппаратуры, размещаемой на базовых станциях 1, путем поочередного излучения соответствующих информационных радиосигналов с базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, приема этих информационных радиосигналов на соседних базовых станциях 1, излучения их с последних базовых станций 1 и дальнейшей последовательной передачи этой информации аналогичным образом на другие базовые станции 1, осуществлять передачу этих информационных радиосигналов на подвижные объекты 2, находящиеся в пределах обслуживаемой территории, и на все базовые станции 1, и определение на них местоположения позиционируемого подвижного объекта, что значительно расширяет возможности способа.
Система для осуществления способа представлена на фиг.5. Система содержит первые приемопередатчики 4, входящие по одному в состав каждой из базовых станций 1, и вторые приемопередатчики 5, размещенные по одному на каждом из подвижных объектов 2, находящихся в пределах обслуживаемой территории. На фиг. 5 в качестве примера изображена система, содержащая двенадцать первых приемопередатчиков 4 и три вторых приемопередатчика 5. При этом описание системы и работы этой системы при осуществлении способа приведено для произвольного числа первых приемопередатчиков 4, входящих по одному в состав каждой из базовых станций 1, и вторых приемопередатчиков 5, размещенных по одному на каждом из подвижных объектов 2, находящихся в пределах обслуживаемой территории.
Базовые станции 1 размещены в вершинах условных ячеек, представляющих собой равные правильные шестиугольники, плотно расположенные между собой, плотно покрывающие обслуживаемую территорию. Радиус зоны 3 действия каждой базовой станции 1 задан равным длине стороны каждого правильного шестиугольника. В каждой точке обслуживаемой территории перекрываются не менее двух зон 3 действия соседних базовых станций 1.
Частотой передачи базовой станции 1 является соответствующая рабочая частота информационных радиосигналов, излучаемых с этой базовой станции 1. Частотой передачи второго приемопередатчика 5 является соответствующая рабочая частота позывных радиосигналов, излучаемых с позиционируемого подвижного объекта 2. Частотой приема второго приемопередатчика 5 является соответствующая рабочая частота информационных радиосигналов, принимаемых на соответствующем подвижном объекте 2. Частотой приема базовой станции 1 является соответствующая рабочая частота позывных радиосигналов, излучаемых с позиционируемого подвижного объекта 2.
Термины "частота передачи" и "частота приема" какого-либо устройства являются общепринятыми. (См. , например, Громаков Ю.А. Стандарты и системы подвижной радиосвязи, - М.: Эко-Трендз, 2000, с. 22.)
Из шести заданных различных рабочих частот на каждой базовой станции 1 задана частота передачи этой базовой станции 1, отличная от заданных частот передачи соседних базовых станций 1. Из указанных шести заданных рабочих частот на каждом подвижном объекте 2 заданы одна частота передачи и пять различных частот приема второго приемопередатчика 5, размещенного на этом подвижном объекте 2. При этом заданные частоты передачи всех вторых приемопередатчиков 5 равны между собой и являются отличными от любой из указанных шести заданных рабочих частот. На каждой базовой станции 1 задана также частота приема этой базовой станции 1, совпадающая с заданной частотой передачи каждого второго приемопередатчика 5.
Все элементы и блоки, входящие в состав системы для осуществления способа, являются известными и описанными в литературе.
Первый приемопередатчик 4, входящий в состав каждой базовой станции 1, представленный на фиг.6, содержит первую приемную антенну 6, три канала приема информационных радиосигналов, каждый из которых содержит первый полосовой фильтр 7, первый малошумящий усилитель 8, первый амплитудный ограничитель 9, первый частотный детектор 10, первый блок 11 возведения в квадрат, первый интегратор 12, аналого-цифровой преобразователь (АЦП) 13. Первый приемопередатчик 4 содержит также один канал приема позывных радиосигналов, который содержит второй полосовой фильтр 14, второй малошумящий усилитель 15, второй амплитудный ограничитель 16, второй частотный детектор 17, второй блок 18 возведения в квадрат, второй интегратор 19, второй АЦП 20. Первый приемопередатчик 4 содержит также первый управляемый генератор 21, первый усилитель 22 мощности, первую передающую антенну 23, первый микроконтроллер 24, первый индикатор 25, первый блок 26 задания.
Выход первой приемной антенны 6, предназначенной для ненаправленного приема информационных радиосигналов, излучаемых с соседних базовых станций 1, и позывных радиосигналов, излучаемых с позиционируемого подвижного объекта 2, подключен к входам всех первых полосовых фильтров 7. Информационные радиосигналы представляют собой высокочастотные частотно-манипулированные электромагнитные колебания соответствующих рабочих частот. Первые полосовые фильтры 7 служат для селекции информационных радиосигналов по частоте. При этом каждый из них настроен на заданную частоту передачи одной из соответствующих соседних базовых станций 1. Ширина полосы пропускания каждого первого полосового фильтра 7 не меньше ширины полосы частот информационных радиосигналов соответствующей рабочей частоты. В каждом канале приема информационных радиосигналов выход первого полосового фильтра 7 подключен к входу первого малошумящего усилителя 8, предназначенного для усиления принимаемых радиосигналов. Выход первого малошумящего усилителя 8 подключен к входу первого амплитудного ограничителя 9, который служит для устранения паразитной амплитудной модуляции сигналов, возникающей при распространении радиоволн. Выход первого амплитудного ограничителя 9 подключен к входу первого частотного детектора 10, предназначенного для осуществления частотного детектирования принимаемых информационных радиосигналов. Выход первого малошумящего усилителя 8 подключен также к входу первого блока 11 возведения в квадрат, выход которого подключен к входу первого интегратора 12. Последовательно соединенные первый блок 11 возведения в квадрат и первый интегратор 12 служат для формирования сигналов, пропорциональных мощности принимаемых радиосигналов. Выход первого интегратора 12 соединен с входом первого АЦП 13. Выход первой приемной антенны 6 подключен также к входу второго полосового фильтра 14, настроенного на заданную частоту передачи вторых приемопередатчиков 5. Полосы пропускания первых полосовых фильтров 7 и второго полосового фильтра 14 являются не перекрывающимися. Ширина полосы пропускания второго полосового фильтра 14 не меньше ширины полосы частот позывных радиосигналов. Позывные радиосигналы представляют собой высокочастотные частотно-манипулированные электромагнитные колебания заданной рабочей частоты. В канале приема позывных радиосигналов выход второго полосового фильтра 14 подключен к входу второго малошумящего усилителя 15, предназначенного для усиления принимаемых позывных радиосигналов. Выход второго малошумящего усилителя 15 подключен к входу второго амплитудного ограничителя 16, предназначенного для устранения паразитной амплитудной модуляции сигналов, возникающей при распространении радиоволн. Выход второго амплитудного ограничителя 16 подключен к входу второго частотного детектора 17, который служит для осуществления частотного детектирования принимаемых позывных радиосигналов. Выход второго малошумящего усилителя 15 подключен также к входу второго блока 18 возведения в квадрат, выход которого подключен к входу второго интегратора 19. Последовательно соединенные второй блок 18 возведения в квадрат и второй интегратор 19 служат для формирования сигналов, пропорциональных мощности принимаемых радиосигналов. Выход второго интегратора 19 соединен с входом второго АЦП 20. Выходы всех первых частотных детекторов 10, выходы всех первых АЦП 13, выход второго частотного детектора 17 и выход второго АЦП 20 подключены к соответствующим входам первого микроконтроллера 24. Первый микроконтроллер 24 предназначен для обработки принимаемых радиосигналов, формирования двоичных последовательностей импульсов, соответствующих идентификационным номерам базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, для определения местоположения позиционируемого подвижного объекта 2. Выходы первого микроконтроллера 24 подключены к управляющему входу первого управляемого генератора 21, настроенного на заданную частоту передачи этой базовой станции 1. Первый управляемый генератор 21 служит для формирования высокочастотных частотно-манипулированных сигналов, соответствующих передаваемой информации. Выход первого управляемого генератора 21 соединен с входом первого усилителя 22 мощности, к выходу которого подключена первая передающая антенна 23, предназначенная для ненаправленного излучения в пространство информационных радиосигналов. К входам первого микроконтроллера 24 подключены выходы первого блока 26 задания, который служит для задания на каждой базовой станции 1 координат размещения всех базовых станций 1, соответствующих им заданных идентификационных номеров и радиусов зон 3 действия всех базовых станций 1, и для задания на каждой базовой станции 1 для любых других базовых станций 1, в зонах 3 действия которых может находиться позиционируемый подвижный объект 2, значений рабочих частот информационных радиосигналов, принимаемых на этой базовой станции 1, при которых с этой базовой станции 1 осуществляют излучение информационных радиосигналов на заданной рабочей частоте. К выходам первого микроконтроллера 24 подключены входы первого индикатора 25, который служит для отображения информации о местоположении позиционируемого подвижного объекта 2 на обслуживаемой территории.
Все базовые станции 1 содержат однотипные первые приемопередатчики 4, отличающиеся лишь значениями частот, на которые настраивают первые полосовые фильтры 7 и первые управляемые генераторы 21.
Второй приемопередатчик 5, размещенный на каждом подвижном объекте 2, представленный на фиг.7, содержит вторую приемную антенну 27, пять каналов приема информационных радиосигналов, каждый из которых содержит третий полосовой фильтр 28, третий малошумящий усилитель 29, третий амплитудный ограничитель 30, третий частотный детектор 31, третий блок 32 возведения в квадрат, третий интегратор 33, третий АЦП 34. Второй приемопередатчик 5 содержит также второй управляемый генератор 35, второй усилитель 36 мощности, вторую передающую антенну 37, второй микроконтроллер 38, второй индикатор 39, второй блок 40 задания.
Выход второй приемной антенны 27, предназначенной для ненаправленного приема информационных радиосигналов, излучаемых с базовых станций 1, подключен к входам всех третьих полосовых фильтров 28, которые служат для селекции информационных радиосигналов по частоте. Каждый из них настроен соответственно на одну из заданных частот приема этого второго приемопередатчика 5. Ширина полосы пропускания каждого третьего полосового фильтра 28 не меньше ширины полосы частот информационных радиосигналов соответствующей рабочей частоты. Полосы пропускания третьих полосовых фильтров 28 являются не перекрывающимися. В каждом канале приема информационных радиосигналов выход третьего полосового фильтра 28 подключен к входу третьего малошумящего усилителя 29, предназначенного для усиления принимаемых информационных радиосигналов. Выход третьего малошумящего усилителя 29 подключен к входу третьего амплитудного ограничителя 30, который служит для устранения паразитной амплитудной модуляции сигналов, возникающей при распространении радиоволн. Выход третьего амплитудного ограничителя 30 подключен к входу третьего частотного детектора 31, предназначенного для осуществления частотного детектирования принимаемых информационных радиосигналов. Выход третьего малошумящего усилителя 29 подключен также к входу третьего блока 32 возведения в квадрат, выход которого подключен к входу третьего интегратора 33. Последовательно соединенные третий блок 32 возведения в квадрат и третий интегратор 33 служат для формирования сигналов, пропорциональных мощности принимаемых информационных радиосигналов. Выход третьего интегратора 33 соединен с входом третьего АЦП 34. Выходы всех третьих частотных детекторов 31 и выходы всех третьих АЦП 34 подключены к соответствующим входам второго микроконтроллера 38. Один из выходов второго микроконтроллера 38 подключен к управляющему входу второго управляемого генератора 35, настроенного на заданную частоту передачи вторых приемопередатчиков 5, другой выход второго микроконтроллера 38 подключен к управляющему входу второго усилителя 36 мощности. Выход второго управляемого генератора 35 соединен с входом второго усилителя 36 мощности, который служит для усиления сигналов по мощности. К выходу второго усилителя 36 мощности подключена вторая передающая антенна 37, предназначенная для ненаправленного излучения в пространство позывных радиосигналов. Второй микроконтроллер 38 предназначен для формирования двоичных последовательностей импульсов, соответствующих кодам рабочих частот излучаемых информационных радиосигналов, для определения местоположения позиционируемого подвижного объекта 2 и отображения этой информации на втором индикаторе 39, входы которого подключены к выходам второго микроконтроллера 38. К входам второго микроконтроллера 38 подключены выходы второго блока 40 задания, который служит для задания на каждом подвижном объекте 2 координат размещения всех базовых станций 1, соответствующих им заданных идентификационных номеров и радиусов зон 3 действия всех базовых станций 1.
Термин "управляемый генератор" является общепринятым. (См., например, Теоретические основы радиолокации. Под ред. В.Е. Дулевича. -М.: Советское радио, 1978, с. 358). Частота колебаний, формируемых управляемым генератором, определяется напряжением, действующим на его управляющем входе. В этом случае управляемый генератор является генератором, управляемым по напряжению. Генераторы, управляемые по напряжению, являются известными и описанными в литературе устройствами. (См., например, Хоровиц П., Хилл. У. Искусство схемотехники. В 3-х томах: Т1. Пер. с англ. - 4-е изд. перераб. и доп.-М.: Мир, 1993, с. 308.) Под частотой настройки управляемого генератора понимаем центральную частоту рабочего диапазона управляемого генератора, соответствующего рабочему диапазону управляющих напряжений.
В качестве первых амплитудных ограничителей 9, вторых амплитудных ограничителей 16 и третьих амплитудных ограничителей 30 могут быть применены, например, нелинейные резонансные усилители, настроенные на соответствующие рабочие частоты. (См. , например, Гоноровский И.С. Радиотехнические цепи и сигналы. - М.: Радио и связь, 1986, с. 235.)
На всех подвижных объектах 2 размещены однотипные вторые приемопередатчики 5, причем рабочие частоты, на которые настраивают третьи полосовые фильтры 28, могут совпадать на различных подвижных объектах 2.
На базовых станциях 1 и на подвижных объектах 2 заданы соответственно такие значения коэффициентов усиления первых малошумящих усилителей 8, вторых малошумящих усилителей 15 и третьих малошумящих усилителей 29, при которых чувствительность каналов приема информационных радиосигналов на базовых станциях 1 и на подвижных объектах 2, а также чувствительность каналов приема позывных радиосигналов на базовых станциях 1 равна Рпр.мин. На базовых станциях 1 (в зависимости от заданных значений рабочих частот fq информационных радиосигналов, излучаемых с этих базовых станций 1) и на позиционируемом подвижном объекте 2 (в зависимости от заданного значения рабочей частоты fп позывных радиосигналов, излучаемых с позиционируемого подвижного объекта 2) заданы соответственно такие значения коэффициентов усиления по мощности первых усилителей 22 мощности и вторых усилителей 36 мощности, при которых соответственно значения мощности излучаемых информационных радиосигналов равны Рqизл, а значение мощности излучаемых позывных радиосигналов равно Рп.изл. При этом значения Рqизл и значения Рп.изл и Рпр.мин выбраны исходя из заданного значения радиуса зоны 3 действия каждой базовой станции 1, равного длине стороны каждого из указанных правильных шестиугольников.
Информационные и позывные радиосигналы являются узкополосными; время распространения радиосигналов от каждой базовой станции 1 до соседних базовых станций 1 и интервал времени измерения мощности принимаемых радиосигналов пренебрежимо малы по сравнению с длительностью любого из импульсов модулирующих двоичных последовательностей импульсов, соответствующих передаваемой информации; время распространения сигналов в приемопередающих трактах базовых станций 1 и подвижных объектов 2 пренебрежимо мало.
Принятым допущениям соответствуют, например, следующие параметры системы. Радиус зоны 3 действия каждой базовой станции 1 равен 500 м; рабочие частоты информационных радиосигналов, излучаемых со всех базовых станций 1, соответственно равны 12, 13, 14, 15, 16 и 17 МГц; рабочая частота позывных радиосигналов, излучаемых с позиционируемого подвижного объекта 2, равна 10 МГц; длительность любого из импульсов модулирующих двоичных последовательностей импульсов, соответствующих передаваемой информации, не менее 10 мс, интервал времени однократного измерения мощности принимаемых радиосигналов не более 0,1 мс.
Рассмотрим осуществление способа с помощью системы, представленной на фиг.5.
На каждой базовой станции 1 в первый блок 26 задания вводят идентификационный номер этой базовой станции 1, а также координаты размещения всех базовых станций 1 и соответствующие им заданные идентификационные номера и радиусы зон 3 действия всех базовых станций 1. На каждой базовой станции 1 в первый блок 26 задания вводят также для любых других базовых станций 1, в зонах 3 действия которых может находиться позиционируемый подвижный объект 2, значения рабочих частот информационных радиосигналов, принимаемых на этой базовой станции 1, при которых с этой базовой станции 1 осуществляют излучение информационных радиосигналов на заданной рабочей частоте.
На каждом подвижном объекте 2, находящемся в пределах обслуживаемой территории, во второй блок 40 задания вводят координаты размещения всех базовых станций 1, а также соответствующие им заданные идентификационные номера и радиусы зон 3 действия всех базовых станций 1.
В системе излучение позывных радиосигналов осуществляют только с позиционируемого подвижного объекта 2. В связи с этим на позиционируемом подвижном объекте 2 второй микроконтроллер 38 формирует на управляющем входе второго усилителя 36 мощности управляющий сигнал, по которому коэффициент усиления по мощности второго усилителя 36 мощности принимает заданное значение. На каждом из подвижных объектов 2, не являющихся позиционируемыми, второй микроконтроллер 38 формирует на управляющем входе второго усилителя 36 мощности управляющий сигнал, по которому второй усилитель 36 мощности переходит в выключенное состояние (коэффициент усиления по мощности равен нулю), и излучение радиосигналов с этого подвижного объекта 2 невозможно.
На позиционируемом подвижном объекте 2 второй микроконтроллер 38 формирует на управляющем входе второго управляемого генератора 35 двоичную последовательность импульсов, соответствующую коду первой из шести заданных рабочих частот. Продолжительность указанной двоичной последовательности импульсов фиксирована. Второй управляемый генератор 35 формирует высокочастотный частотно-манипулированный сигнал, соответствующий указанному коду. Этот сигнал поступает на вход второго усилителя 36 мощности, сигнал с выхода которого поступает на вход второй передающей антенны 37. Вторая передающая антенна 37 излучает в пространство позывной радиосигнал, представляющий собой высокочастотный частотно-манипулированный радиосигнал, содержащий код первой из шести заданных рабочих частот.
На каждой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, осуществляют прием позывного радиосигнала, излучаемого с позиционируемого подвижного объекта 2. При этом первая приемная антенна 6, входящая в состав каждого из первых приемопередатчиков 4, содержащихся в этих базовых станциях 1, принимает позывной радиосигнал, содержащий код первой из шести заданных рабочих частот. Принимаемый позывной радиосигнал поступает на вход второго полосового фильтра 14. На выходе второго полосового фильтра 14, настроенного на рабочую частоту позывных радиосигналов, излучаемых с позиционируемого подвижного объекта 2, действует соответствующий принимаемому позывному радиосигналу высокочастотный частотно-манипулированный сигнал. Этот сигнал поступает на вход второго малошумящего усилителя 15, с выхода которого сигнал поступает на вход второго амплитудного ограничителя 16. Второй амплитудный ограничитель 16 осуществляет амплитудное ограничение сигнала. С выхода второго амплитудного ограничителя 16 сигнал поступает на вход второго частотного детектора 17. Второй частотный детектор 17 осуществляет частотное детектирование принимаемого позывного радиосигнала и вырабатывает двоичную последовательность импульсов, соответствующую коду первой из шести заданных рабочих частот. Эта двоичная последовательность импульсов поступает на вход первого микроконтроллера 24. Одновременно сигнал с выхода второго малошумящего усилителя 15 поступает на вход второго блока 18 возведения в квадрат, выходной сигнал которого поступает на вход второго интегратора 19, который на входе второго АЦП 20 формирует в соответствии с формулой (2) сигнал, пропорциональный мощности принимаемого позывного радиосигнала. Цифровой код с выходов второго АЦП 20 поступает на вход первого микроконтроллера 24. Первый микроконтроллер 24 определяет по цифровому коду, действующему на выходах второго АЦП 20, и известному значению коэффициента усиления канала приема позывных радиосигналов значение мощности Рпр принимаемого позывного радиосигнала. Первый микроконтроллер 24 осуществляет проверку условия Рпр≥Рпр.мин и в случае его выполнения принимает решение о наличии на входе первого приемопередатчика 4 позывного радиосигнала соответствующей рабочей частоты, в противном случае первый микроконтроллер 24 принимает противоположное решение. Затем первый микроконтроллер 24 считывает из первого блока 26 задания заданное значение рабочей частоты информационных радиосигналов, излучаемых с этой базовой станции 1, и заданный идентификационный номер этой базовой станции 1. Если заданная рабочая частота информационных радиосигналов, излучаемых с этой базовой станции 1, и первая из шести заданных рабочих частот, код которой содержится в позывном радиосигнале, совпадают, то первый микроконтроллер 24 формирует на управляющем входе первого управляемого генератора 21 двоичную последовательность импульсов, соответствующую заданному идентификационному номеру этой базовой станции 1. (В противном случае первый микроконтроллер 24 ожидает поступления следующих позывных радиосигналов.) Первый управляемый генератор 21, настроенный на первую из шести заданных рабочих частот, вырабатывает высокочастотный частотно-манипулированный сигнал, который поступает на вход первого усилителя 22 мощности. С выхода первого усилителя 22 мощности усиленный по мощности сигнал поступает на вход первой передающей антенны 23. Первая передающая антенна 23 излучает в пространство сформированный таким образом информационный радиосигнал, содержащий идентификационный номер этой базовой станции 1, которую далее будем считать первой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2. Затем первый микроконтроллер 24 запоминает этот идентификационный номер.
Первая из шести заданных рабочих частот, код которой содержится в позывном радиосигнале, не может одновременно совпадать с несколькими заданными рабочими частотами информационных радиосигналов, излучаемых с базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, поскольку заданная рабочая частота информационных радиосигналов, излучаемых с каждой базовой станции 1, является отличной от заданных рабочих частот информационных радиосигналов, излучаемых с соседних базовых станций 1. В связи с этим одновременного излучения с базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, информационных радиосигналов, содержащих идентификационные номера этих базовых станций 1, не происходит.
Прием информационного радиосигнала, излучаемого с первой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, осуществляют на всех соседних базовых станциях 1 с помощью содержащихся в них первых приемопередатчиков 4. При этом первая приемная антенна 6, входящая в состав каждого из этих первых приемопередатчиков 4, принимает информационный радиосигнал, излучаемый с первой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2. Принимаемый информационный радиосигнал поступает на входы первых полосовых фильтров 7. На каждой базовой станции 1, являющейся соседней по отношению к первой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, на выходе одного из первых полосовых фильтров 7, настроенного на рабочую частоту информационных радиосигналов, излучаемых с первой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, действует соответствующий принимаемому информационному радиосигналу высокочастотный частотно-манипулированный сигнал. Этот сигнал поступает на вход первого малошумящего усилителя 8, с выхода которого сигнал поступает на вход первого амплитудного ограничителя 9. Первый амплитудный ограничитель 9 осуществляет амплитудное ограничение сигнала. С выхода первого амплитудного ограничителя 9 сигнал поступает на вход первого частотного детектора 10. Первый частотный детектор 10 осуществляет частотное детектирование принимаемого информационного радиосигнала и вырабатывает двоичную последовательность импульсов, соответствующую идентификационному номеру первой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2. Эта двоичная последовательность импульсов поступает на вход первого микроконтроллера 24, который определяет идентификационный номер первой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2.
Одновременно сигнал с выхода указанного первого малошумящего усилителя 8 поступает на вход первого блока 11 возведения в квадрат, выходной сигнал которого поступает на вход первого интегратора 12, который на входе первого АЦП 13 формирует в соответствии с формулой (2) сигнал, пропорциональный мощности принимаемого информационного радиосигнала. Цифровой код с выходов указанного первого АЦП 13 поступает на входы первого микроконтроллера 24. Первый микроконтроллер 24 определяет по цифровому коду, действующему на выходе указанного первого АЦП 13, и известному значению коэффициента усиления соответствующего канала приема информационных радиосигналов значение мощности принимаемого информационного радиосигнала Рпр. Первый микроконтроллер 24 осуществляет проверку условия Рпр≤Рпр.мин и в случае его выполнения принимает решение о наличии на входе первого приемопередатчика 4 информационного радиосигнала соответствующей рабочей частоты, в противном случае первый микроконтроллер 24 принимает противоположное решение. Затем первый микроконтроллер 24 считывает из первого блока 26 задания заданные на этой базовой станции 1 для идентификационного номера первой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, значения рабочих частот информационных радиосигналов, принимаемых на этой базовой станции 1, при которых с этой базовой станции 1 осуществляют излучение информационных радиосигналов на заданной рабочей частоте. (На каждой базовой станции 1, являющейся соседней по отношению к первой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, единственной из указанных заданных рабочих частот является рабочая частота информационных радиосигналов, излучаемых с первой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2. ) Если рабочая частота принимаемого информационного радиосигнала совпадает с одной из указанных заданных рабочих частот, то первый микроконтроллер 24 формирует на управляющем входе первого управляемого генератора 21 двоичную последовательность импульсов, соответствующую идентификационному номеру первой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2. Первый управляемый генератор 21 формирует высокочастотный частотно-манипулированный сигнал на заданной рабочей частоте, который поступает на вход первого усилителя 22 мощности. С выхода первого усилителя 22 мощности усиленный по мощности сигнал поступает на вход первой передающей антенны 23, которая излучает в пространство информационный радиосигнал, содержащий идентификационный номер первой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2. Затем первый микроконтроллер 24 запоминает этот идентификационный номер.
Прием информационных радиосигналов, излучаемых с базовых станций 1, являющихся соседними по отношению к первой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, осуществляют на всех базовых станциях 1, являющихся соседними по отношению к указанным соседним базовым станциям 1, с помощью содержащихся в них первых приемопередатчиков 4. При этом первая приемная антенна 6, входящая в состав каждого из этих первых приемопередатчиков 4, принимает информационные радиосигналы, излучаемые с указанных соседних базовых станций 1. Принимаемые информационные радиосигналы поступают на входы первых полосовых фильтров 7, которые осуществляют их селекцию по частоте. На каждой базовой станции 1, являющейся соседней по отношению к указанным соседним базовым станциям 1, на выходе первых полосовых фильтров 7 действуют соответствующие принимаемым информационным радиосигналам высокочастотные частотно-манипулированные сигналы. Эти сигналы поступают на входы первых малошумящих усилителей 8, с выходов которых сигналы поступают на входы первых амплитудных ограничителей 9. Первые амплитудные ограничители 9 осуществляют амплитудное ограничение сигналов. С выходов первых амплитудных ограничителей 9 сигналы поступают на входы первых частотных детекторов 10. Первые частотные детекторы 10 осуществляют частотное детектирование принимаемых информационных радиосигналов и вырабатывают двоичные последовательности импульсов, соответствующие идентификационному номеру первой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2. Эти двоичные последовательности импульсов поступают на входы первого микроконтроллера 24, который определяет по ним идентификационный номер первой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2.
Одновременно сигналы с выходов первых малошумящих усилителей 8 поступают на входы первых блоков 11 возведения в квадрат, выходные сигналы которых поступают на входы первых интеграторов 12, которые на входах первых АЦП 13 формируют в соответствии с формулой (2) сигналы, пропорциональные мощности принимаемых информационных радиосигналов. Цифровые коды с выходов первых АЦП 13 поступают на входы первого микроконтроллера 24. Первый микроконтроллер 24 определяет по цифровым кодам, действующим на выходах первых АЦП 13, и известным значениям коэффициентов усиления соответствующих каналов приема информационных радиосигналов значения мощности Рпр принимаемых информационных радиосигналов. Для каждого из каналов приема информационных радиосигналов первый микроконтроллер 24 осуществляет проверку условия Рпр≤Рпр.мин и в случае его выполнения принимает решение о наличии на входе первого приемопередатчика 4 информационного радиосигнала соответствующей рабочей частоты, в противном случае первый микроконтроллер 24 принимает противоположное решение. Затем первый микроконтроллер 24 считывает из первого блока 26 задания заданные па этой базовой станции 1 для идентификационного номера первой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, значения рабочих частот информационных радиосигналов, принимаемых на этой базовой станции 1, при которых с этой базовой станции 1 осуществляют излучение информационных радиосигналов на заданной рабочей частоте. Если рабочая частота одного из принимаемых информационных радиосигналов совпадает с одной из указанных заданных рабочих частот, то первый микроконтроллер 24 формирует на управляющем входе первого управляемого генератора 21 двоичную последовательность импульсов, соответствующую идентификационному номеру первой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2. Первый управляемый генератор 21 формирует высокочастотный частотно-манипулированный сигнал на заданной рабочей частоте, который поступает на вход первого усилителя 22 мощности. С выхода первого усилителя 22 мощности усиленный по мощности сигнал поступает на вход первой передающей антенны 23, которая излучает в пространство информационный радиосигнал, содержащий идентификационный номер первой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2. Затем первый микроконтроллер 24 запоминает этот идентификационный номер.
По аналогии с изложенным первые приемопередатчики 4, входящие в состав всех других базовых станций 1, осуществляют прием и излучение информационных радиосигналов, содержащих идентификационный номер первой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, а также запоминание этого идентификационного номера.
Информационные радиосигналы, излучаемые с каждой базовой станции 1, проникают через первые приемные антенны 6 на входы первых приемопередатчиков 4, входящих в состав соседних базовых станций 1. Однако это не вызывает "зацикливания" работы системы, поскольку излучение информационных радиосигналов с каждой базовой станции 1, кроме базовой станции 1, идентификационный номер которой содержится в передаваемых информационных радиосигналах, осуществляют лишь при приеме на этой базовой станции 1 информационных радиосигналов одной из заданных на этой базовой станции 1 рабочих частот. При этом излучение информационных радиосигналов с базовой станции 1, идентификационный номер которой содержится в передаваемых информационных радиосигналах, осуществляют независимо от работы соседних базовых станций 1.
Таким образом, первые приемопередатчики 4, входящие в состав базовых станций 1, в соответствии с информацией, содержащейся в первых блоках 26 задания, последовательно, по всем направлениям от базовой станции 1, являющейся источником передаваемой информации, к границам обслуживаемой территории на всех других последующих базовых станциях 1, являющихся соседними по отношению к предыдущим базовым станциям 1, осуществляют прием излучаемых с предыдущих базовых станций 1 информационных радиосигналов и их излучение на соответствующих заданных рабочих частотах.
На каждом подвижном объекте 2, находящемся в пределах обслуживаемой территории, вторая приемная антенна 27, входящая в состав размещенного на нем второго приемопередатчика 5, представленного на фиг.7, принимает информационные радиосигналы, излучаемые с базовых станций 1, в зонах 3 действия которых находится этот подвижный объект 2. Эти информационные радиосигналы содержат идентификационный номер первой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2. Сигналы с выхода второй приемной антенны 27 поступают на входы третьих полосовых фильтров 28, которые осуществляют их селекцию по частоте. Сигналы с выходов третьих полосовых фильтров 28 поступают на входы третьих малошумящих усилителей 29, сигналы с выходов которых поступают на входы третьих амплитудных ограничителей 30. Третьи амплитудные ограничители 30 осуществляют амплитудное ограничение сигналов. С выходов третьих амплитудных ограничителей 30 сигналы поступают на входы третьих частотных детекторов 31, которые осуществляют частотное детектирование принимаемых информационных радиосигналов. Двоичные последовательности импульсов, вырабатываемые третьими частотными детекторами 31, поступают на входы второго микроконтроллера 38. Одновременно сигналы с выходов третьих малошумящих усилителей 29 поступают на входы третьих блоков 32 возведения в квадрат, выходные сигналы которых поступают на входы третьих интеграторов 33, которые на входах третьих АЦП 34 формируют в соответствии с формулой (2) сигналы, пропорциональные мощности принимаемых информационных радиосигналов. Цифровые коды с выходов третьих АЦП 34 поступают на входы второго микроконтроллера 38. Второй микроконтроллер 38 определяет по цифровым кодам, действующим на выходах третьих АЦП 34, и известным значениям коэффициентов усиления соответствующих каналов информационных приема радиосигналов значения мощности Рпр принимаемых информационных радиосигналов. Для каждого из каналов приема информационных радиосигналов второй микроконтроллер 38 осуществляет проверку условия Рпр≤Рпр.мин и в случае его выполнения принимает решение о наличии на входе второго приемопередатчика 5 информационного радиосигнала соответствующей рабочей частоты, в противном случае второй микроконтроллер 38 принимает противоположное решение. Затем второй микроконтроллер 38 обрабатывает двоичные последовательности импульсов, действующие на выходах соответствующих третьих частотных детекторов 31, и запоминает идентификационный номер первой из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2.
На позиционируемом подвижном объекте 2 по окончании излучения позывного радиосигнала, содержащего код первой из шести заданных рабочих частот, через некоторый заданный интервал времени второй микроконтроллер 38 формирует на управляющем входе второго управляемого генератора 35 двоичную последовательность импульсов, соответствующую коду второй из шести заданных рабочих частот. Продолжительность указанной двоичной последовательности импульсов фиксирована. Продолжительность указанного интервала времени фиксирована также и многократно превышает длительность каждого из информационных радиосигналов. Второй управляемый генератор 35 формирует высокочастотный частотно-манипулированный сигнал, соответствующий указанному коду. Этот сигнал поступает на вход второго усилителя 36 мощности, сигнал с выхода которого поступает на вход второй передающей антенны 37. Вторая передающая антенна 37 излучает в пространство позывной радиосигнал, представляющий собой высокочастотный частотно-манипулированный радиосигнал, содержащий код второй из шести заданных рабочих частот.
Далее аналогично описанному выше на базовых станциях 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, осуществляют прием этого позывного радиосигнала. Если на одной из этих базовых станций 1 заданная рабочая частота информационных радиосигналов, излучаемых с этой базовой станции 1, и вторая из шести заданных рабочих частот, код которой содержится в позывном радиосигнале, совпадают, то с этой базовой станции 1 осуществляют излучение информационного радиосигнала, содержащего идентификационный номер этой базовой станции 1, а затем осуществляют запоминание этого идентификационного номера в первом микроконтроллере 24. (Как уже указывалось, этой базовой станцией 1 не может являться рассмотренная выше первая из базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2.)
Затем прием и излучение информационных радиосигналов, содержащих идентификационный номер второй из базовых станций 1, в зонах 3 действия которых находится подвижный объект 2, а также запоминание указанного идентификационного номера осуществляют аналогично описанному выше с помощью первых приемопередатчиков 4, входящих в состав всех базовых станций 1, кроме последней базовой станции 1. Прием этих информационных радиосигналов и запоминание указанного идентификационного номера осуществляют аналогично описанному выше с помощью вторых приемопередатчиков 5 на подвижных объектах 2, находящихся в пределах обслуживаемой территории.
Затем второй приемопередатчик 5, размещенный на позиционируемом подвижном объекте 2, аналогичным образом поочередно излучает с интервалом времени указанной продолжительности позывные радиосигналы, содержащие соответственно коды с третьей по шестую из шести заданных рабочих частот.
В соответствии с этим в течение всего цикла излучения позывных радиосигналов со всех базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, осуществляют аналогичным образом поочередно передачу информационных радиосигналов на подвижные объекты 2, находящиеся в пределах обслуживаемой территории. Число базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, лежит, как уже указывалось, в диапазоне от двух до шести.
Предполагаем, что изменение местоположения позиционируемого подвижного объекта 2, происходящее за время одного цикла излучения позывных радиосигналов, пренебрежимо мало.
В первом приемопередатчике 4, входящем в состав каждой базовой станции 1, по окончании каждого интервала времени, равного по продолжительности одному циклу излучения позывных радиосигналов, первый микроконтроллер 24 по запомненным идентификационным номерам базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, считывает из первого блока 26 задания координаты размещения и значения радиусов зон 3 действия этих базовых станций 1 и определяет с помощью формулы (4) местоположение позиционируемого подвижного объекта 2. Затем первый микроконтроллер 24 формирует на входах первого индикатора 25 сигналы для отображения информации о местоположении позиционируемого подвижного объекта 2 на обслуживаемой территории.
Во втором приемопередатчике 5, размещенном на каждом подвижном объекте 2, по окончании каждого интервала времени, равного по продолжительности одному циклу излучения позывных радиосигналов, второй микроконтроллер 38 по запомненным идентификационным номерам базовых станций 1, в зонах 3 действия которых находится позиционируемый подвижный объект 2, считывает из второго блока 40 задания координаты размещения и значения радиусов зон 3 действия этих базовых станций 1 и определяет с помощью формулы (4) местоположение позиционируемого подвижного объекта 2. Затем второй микроконтроллер 38 формирует на входах второго индикатора 39 сигналы для отображения информации о местоположении позиционируемого подвижного объекта 2 на обслуживаемой территории.
На базовых станциях 1 и на подвижных объектах 2 первые микроконтроллеры 24 и вторые микроконтроллеры 38 соответственно отсчет указанных интервалов времени ведут автономно, не синхронизируя друг относительно друга моменты времени начала отсчета.
Таким образом, способ позволяет, в отличие от прототипа, определять область обслуживаемой территории, образованную фрагментами границ зон 3 действия базовых станций 1, в которой находится позиционируемый подвижный объект 2, что значительно повышает точность определения местоположения позиционируемого подвижного объекта 2 в системе координат, связанной с какой-либо точкой обслуживаемой территории. Вместе с тем способ позволяет значительно повысить, по сравнению с прототипом, точность определения местоположения подвижных объектов 2, находящихся на центральных участках зон 3 действия базовых станций 1. Более того, способ позволяет, в отличие от прототипа, определять местоположение позиционируемого подвижного объекта 2 на подвижных объектах 2, находящихся в пределах обслуживаемой территории, и на базовых станциях 1 и не требует применения центра коммутации и оптоволоконных линий связи, что значительно расширяет возможности способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2001 |
|
RU2195776C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2001 |
|
RU2195779C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2001 |
|
RU2195780C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2001 |
|
RU2195783C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2001 |
|
RU2195781C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2001 |
|
RU2195782C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2001 |
|
RU2195778C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ НА ПОДВИЖНЫЕ ОБЪЕКТЫ | 2001 |
|
RU2187894C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ НА ПОДВИЖНЫЕ ОБЪЕКТЫ | 2001 |
|
RU2195775C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ НА ПОДВИЖНЫЕ ОБЪЕКТЫ | 2001 |
|
RU2193819C1 |
Изобретение относится к радионавигации, а именно к способам определения местоположения подвижных объектов. Технический результат состоит в повышении точности определения местоположения подвижных объектов и расширении возможностей способа на основе рационального размещения базовых станций на обслуживаемой территории. Способ заключается в том, что в условных ячейках, представляющих собой равные правильные шестиугольники, плотно покрывающие обслуживаемую территорию, размещают базовые станции с радиусами зон действия, равными длине стороны каждого правильного шестиугольника, и с заданным на каждой из этих базовых станций уникальным идентификационным номером, с позиционируемого подвижного объекта, являющегося одним из подвижных объектов, находящихся в пределах обслуживаемой территории, осуществляют излучение позывных радиосигналов на заданной рабочей частоте. Базовые станции размещают в вершинах правильных шестиугольников. 7 ил.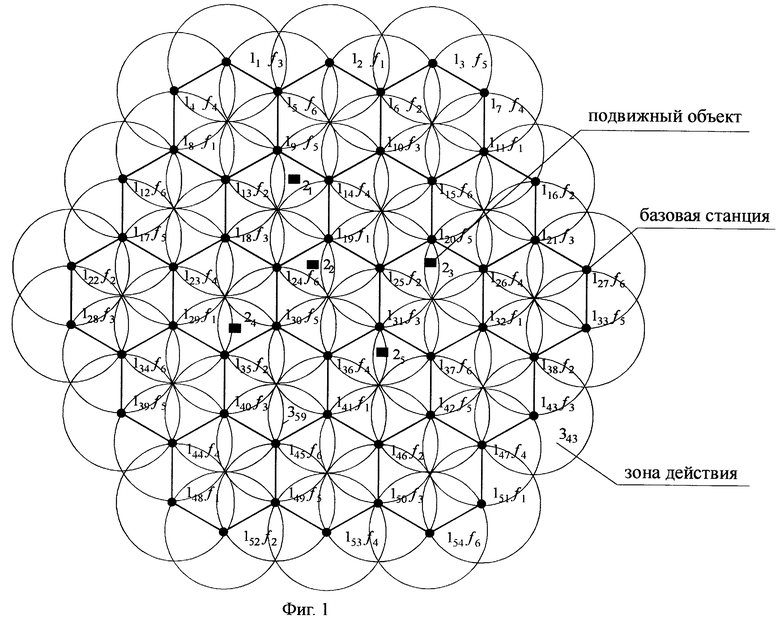
Способ определения местоположения подвижного объекта, заключающийся в том, что в условных ячейках, представляющих собой равные правильные шестиугольники, плотно покрывающие обслуживаемую территорию, размещают базовые станции с радиусами зон действия, равными длине стороны каждого правильного шестиугольника, и с заданным на каждой из этих базовых станций уникальным идентификационным номером, с позиционируемого подвижного объекта, являющегося одним из подвижных объектов, находящихся в пределах обслуживаемой территории, осуществляют излучение позывных радиосигналов на заданной рабочей частоте, эти позывные радиосигналы принимают на базовых станциях, в зонах действия которых находится позиционируемый подвижный объект, с этих базовых станций передают информационные сигналы, содержащие идентификационные номера указанных базовых станций, по этим информационным сигналам определяют местоположение позиционируемого подвижного объекта, отличающийся тем, что размещение базовых станций осуществляют в вершинах указанных правильных шестиугольников, передаваемыми информационными сигналами, содержащими идентификационные номера базовых станций, в зонах действия которых находится позиционируемый подвижный объект, являются соответствующие информационные радиосигналы, передачу информационных радиосигналов с указанных базовых станций осуществляют на подвижные объекты, находящиеся в пределах обслуживаемой территории, задают шесть различных рабочих частот информационных радиосигналов, излучаемых со всех базовых станций, из шести заданных рабочих частот на каждой базовой станции, размещаемой в вершине правильных шестиугольников, задают одну рабочую частоту информационных радиосигналов, излучаемых с этой базовой станции, отличную от рабочих частот информационных радиосигналов, излучаемых с соседних базовых станций, являющихся базовыми станциями, размещаемыми в соседних вершинах этих правильных шестиугольников, из шести заданных рабочих частот на каждом подвижном объекте задают пять различных рабочих частот информационных радиосигналов, принимаемых на этом подвижном объекте, на каждой из базовых станций и на подвижных объектах, находящихся в пределах обслуживаемой территории, задают дополнительно координаты размещения всех базовых станций, а также соответствующие им заданные идентификационные номера и радиусы зон действия всех базовых станций, передача информационных радиосигналов с базовых станций, в зонах действия которых находится позиционируемый подвижный объект, на подвижные объекты, находящиеся в пределах обслуживаемой территории, состоит в том, что вначале с одной из этих базовых станций осуществляют излучение информационных радиосигналов на заданной рабочей частоте, на всех базовых станциях, являющихся соседними по отношению к указанной базовой станции, осуществляют прием излучаемых с последней базовой станции информационных радиосигналов и их излучение на соответствующих заданных рабочих частотах, затем на всех других базовых станциях, являющихся соседними по отношению к указанным базовым станциям, осуществляют прием излучаемых с указанных базовых станций информационных радиосигналов и их излучение на соответствующих заданных рабочих частотах, затем таким же образом последовательно, но всем направлениям от указанной базовой станции, в зоне действия которой находится позиционируемый подвижный объект, к границам обслуживаемой территории на всех других последующих базовых станциях, являющихся соседними но отношению к предыдущим базовым станциям, осуществляют прием излучаемых с предыдущих базовых станций информационных радиосигналов и их излучение на соответствующих заданных рабочих частотах, затем осуществляют аналогичным образом поочередно передачу информационных радиосигналов со всех других базовых станций, в зонах действия которых находится позиционируемый подвижный объект, на подвижные объекты, находящиеся в пределах обслуживаемой территории, при этом излучение информационных радиосигналов на заданной рабочей частоте с каждой базовой станции, кроме базовой станции, идентификационный номер которой содержится в передаваемых информационных радиосигналах, осуществляют при приеме на этой базовой станции информационных радиосигналов одной из заданных на этой базовой станции рабочих частот, на подвижных объектах, находящихся в пределах обслуживаемой территории, осуществляют на заданных рабочих частотах прием информационных радиосигналов, передаваемых с каждой из базовых станций, в зонах действия которых находится позиционируемый подвижный объект, определение местоположения позиционируемого подвижного объекта осуществляют на подвижных объектах, находящихся в пределах обслуживаемой территории, и на базовых станциях по идентификационным номерам базовых станций, в зонах действия которых находится позиционируемый подвижный объект, а также по дополнительно заданным координатам размещения и радиусам зон действия этих базовых станций.
| РАТЫНСКИЙ М.В | |||
| Основы сотовой радиосвязи | |||
| - М.: Радио и связь, 2000, с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| ДУЛЕВИЧ В.Е | |||
| Теоретические основы радиолокации | |||
| - М.: Сов | |||
| радио, 1978, с | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Огнетушитель | 0 |
|
SU91A1 |
| РАСПРЕДЕЛЕННАЯ КОММУТАЦИОННАЯ СИСТЕМА СВЯЗИ | 1994 |
|
RU2138134C1 |
| ЛИХТЦИНДЕР Б.Я | |||
| и др | |||
| Интеллектуальные сети связи | |||
| - М.: Эко-Трендз, 2000, с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
