Изобретение относится к неразрушающему контролю трубопроводов и может быть использовано как транспортное средство для перемещения дефектоскопического оборудования.
Известное устройство для перемещения внутри трубопровода, содержащее два телескопических цилиндра с закрепленными на их наружных поверхностях упругими элементами, контактирующими с внутренней поверхностью трубопровода, причем, телескопические цилиндры соединены между собой приводом возвратно-поступательного перемещения, а каждый упругий элемент выполнен в виде проволочных щеток, наклоненных в обратную сторону движения всего устройства (см. авт. св. СССР 510672, кл. G 01 N 29/04 1974) [1].
Недостатками данного устройства являются невозможность дистанционного перемещения по трубопроводу, сложность конструкции, что обуславливает ограниченные эксплуатационные возможности устройства и его низкую надежность.
Известно также устройство для перемещения по трубопроводу, содержащее корпус, установленный в нем двигатель, кинематически связанные с последним щеткодержатели и закрепленные в них одним концом упругие элементы (см. авт. св. СССР 602854, кл. G 01 N 29/04, 1975) [2].
Недостатками данного устройства также являются низкая надежность и ограниченные эксплуатационные возможности (невозможность дистанционного перемещения), что объясняется сложностью конструкции, а главное - необходимостью перемещения двигателя и механизмов управления и регулирования им по трубопроводу вместе с контрольной аппаратурой.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является устройство для перемещения по трубопроводу, включающее привод возвратно-поступательного движения в виде двигателя вращения, кинематически связанного с регулировочными клиньями и щеткодержателем, а также механизм перемещения по внутренней поверхности трубопровода в виде салазок, соединенных с изогнутыми в форме полуволн синусоиды упругими элементами (см. авт. св. СССР 1054767, кл. G 01 N 29/04, 1982) [3], принятое за прототип.
Недостатками данного устройства являются низкая надежность, сложность конструкции и ограниченные эксплуатационные возможности (невозможность дистанционного перемещения), обусловленные необходимостью перемещения двигателя с приводом возвратно-поступательного движения по трубопроводу вместе с контрольной аппаратурой.
Сущность изобретения заключается в разработке устройства, реализующего режим импульсного перемещения за счет создания однонаправленного тягового усилия при нессиметричном действии сил сопротивления движению, обусловленных переменным магнитным взаимодействием приводного и подвижного элементов в течение полного периода действия импульсного возмущения.
Технический результат - повышение надежности, упрощение конструкции и расширение эксплуатационных возможностей устройства.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном устройстве для перемещения по трубопроводу, включающем привод возвратно-поступательного движения и механизм перемещения по внутренней поверхности трубопровода, особенность заключается в том, что механизм перемещения выполнен в виде свободно размещенной внутри трубопровода цилиндрической оболочки из кордной ткани с вывернутыми внутрь концевыми частями (манжетной мембраны), при этом торца вывернутых внутрь концевых частей герметично соединены друг с другом по контуру с образованием замкнутой кольцевой упругой камеры, частично заполненной ферромагнитной жидкостью, а привод возвратно-поступательного движения выполнен в виде постоянного магнита, размещенного снаружи трубопровода с возможностью перемещения относительно последнего в продольном и поперечном направлениях, а также ферромагнитного диска, концентрично установленного в осевом отверстии кольцевой камеры с возможностью упругого продольного перемещения между ограничителями в пределах длины камеры.
Сущность изобретения поясняется чертежами, где на фиг.1 схематично изображено предлагаемое устройство, общий вид с центральным поперечным разрезом, в исходном состоянии покоя; на фиг.2 - то же устройство в режиме рабочего перемещения.
Устройство для перемещения по трубопроводу включает в себя привод возвратно-поступательного движения и механизм перемещения по внутренней поверхности трубопровода. Механизм перемещения выполнен в виде свободно размещенной внутри трубопровода 1 цилиндрической оболочки из кордонной ткани с вывернутыми внутрь концевыми частями (манжетной мембраны), при этом торцы вывернутых внутрь концевых частей герметично соединены друг с другом по контуру с образованием замкнутой кольцевой упругой камеры 2, частично заполненной ферромагнитной жидкостью 3. Привод возвратно-поступательного движения выполнен в виде постоянного магнита 4, размещенного снаружи трубопровода 1 с возможностью перемещения относительно последнего в продольном и поперечном направлениях соответственно в направляющих 5 и 6, а также ферромагнитного диска 7, установленного концентрично в осевом отверстии 8 кольцевой камеры 2. При этом камера 2 свободно помещена в ограничитель 9 штангообразной формы, состоящей из тонких дисков, примыкающих к торцам камеры 2, соединенных центральным стержнем-перемычкой, а диск 7 свободно надет своим осевым отверстием на перемычку ограничителя 9 и упруго установлен между цилиндрическими пружинами 10, закрепленными наружными торцами на внутренних поверхностях дисков ограничителя 9. Дефектоскопическая аппаратура 11 установлена на наружной поверхности диска ограничителя 9 (подробно механизм крепления аппаратуры не показан, так как это не имеет принципиального значения). Таким образом, ферромагнитный диск 7 имеет возможность упругого осевого смещения в отверстии 8 камеры 2 между дисками ограничителя 9 в пределах длины камеры 2.
Работа устройства осуществляется следующим образом.
В исходном состоянии покоя (фиг.1) постоянный магнит 4 удален от трубопровода 1 (на фиг.1 магнит 4 вообще не показан), ферромагнитная жидкость 3 размещена свободно и частично заполняет внутреннюю полость кольцевой камеры 2, также находящейся в свободном недеформированном состоянии. Ферромагнитный диск 7 свободно с радиальным зазором размещен в осевом отверстии 8 в центральной части камеры 2 симметрично между двумя исходно недеформированными пружинами 10. Для движения механизма перемещения устройства, например, вправо (см. фиг.2) постоянный магнит 4 сначала перемещают в направляющих 6 поперечно трубопроводу 1 почти до контакта с трубопроводом, а далее плавно ведут магнит 4 вправо в направляющих 5 вместе с направляющими 6 вдоль трубопровода 1 на некоторое расстояние (естественно, что максимум этого расстояния за один ход перемещения равен половине длины камеры 2, так как при таком смещении шайбы 7 за магнитом 4 шайбы 7 упрется в торец ограничителя 9). Конструкция направляющих для перемещения элемента независимо в 2-х направлениях (придания элементу 2-х степеней свободы) общеизвестна, поэтому на фиг.2 подробно не показана. Кроме того, сразу укажем, что, во-первых, магнит 4 в общем случае можно просто двигать вручную без всяких направляющих, а во-вторых, устройство предназначено для трубопроводов 1 из неферромагнитных материалов, не экранирующих ферромагнитные диск 7 и жидкость 3 от постоянного магнита 4. При приближении магнита 4 к трубопроводу 1 диск 7 и весь объем ферромагнитной жидкости 3 концентрируются в зоне магнитного поля магнита 4. Происходит местное раздутие (распирание) упругой камеры 2 в этой зоне, при этом внешняя часть камеры 2 прижимается к внутренней поверхности трубопровода 1, а внутренняя часть камеры 2 зажимает диск 7. При движении магнита 4 вправо ферромагнитный диск 7 естественно также смещается за магнитом 4 вправо (см. фиг.2), увлекая за собой внутреннюю (вывернутую) часть упругой камеры 2, при этом правая (на фиг.2) часть камеры 2 разворачивается изнутри наружу, левая часть камеры наоборот заворачивается снаружи внутрь, свободно проскальзывая по боковым дискам ограничителя 9. В результате ферромагнитный диск 7 смещается относительно камеры 2 вправо, деформируя пружины 10 - левая пружина растягивается, правая - сжимается, при этом камера 2 вместе с ограничителем 9 смещается также вправо относительно трубопровода 1, длина камеры 2 вдоль трубопровода не меняется, ограничитель 9 свободно смещается вместе с камерой 2, не давая диску 7 возможности случайно в случае его значительного относительного перемещения выйти за пределы камеры. Далее, магнит 4 убирают от трубопровода 1, жидкость 3 в камере 2 опять занимает исходное состояние (см. фиг.1), деформация камеры 2 в радиальном направлении сразу при растекании жидкости 3 устраняется, диск 7 освобождается от зажима камеры 2, и под действием пружин 10 уходит назад в симметричное относительно камеры 2 положение (естественно, камера 2 остается при этом в своем новом, смещенном вправо относительно трубопровода 1 положении). Далее, прогресс опять повторяется, магнит 4 подводится к трубопроводу 1 и магнит 4 плавно двигают вправо (как уже было выше сказано, за один ход диск 7, следуя за магнитом 4, пройдет максимум половину длины камеры 2 и упрется в упор 9, практически на то же самое расстояние камеры 2 за один ход сместится вправо относительно внутренней поверхности трубопровода 1. Последовательно, за несколько ходов можно переместить камеру 2 с аппаратурой 11 в любую точку трубопровода 1. Пружины 10 дают возможность после каждого хода возвращать ферромагнитный диск 7 в исходное положение и начинать процесс перемещения камеры 2 заново. Ограничитель 9 не позволяет при каждом ходе выйти диску 7 за пределы длины камеры 2. Даже если продолжать смещение магнита 4 относительно трубопровода 1 после упора диска 7 в торец ограничителя 9 процесс перемещения камеры в 2 автоматически прекращается.
Очевидно, что данное устройство имеет предельно простую конструкцию и, соответственно, высокую надежность, предельно просто в эксплуатации. Главное - что оно позволяет производить дистанционное управление движением механизма перемещения внутри трубопровода при расположении привода - постоянного магнита - в направляющих вне трубопровода. Это резко увеличивает эксплуатационные возможности устройства и повышает его надежность. Очевидно, что вместо постоянного магнита для перемещения при необходимости можно использовать электромагнитный привод, при этом вместо ввода - вывода постоянного магнита в зону трубопровода следует подавать в электромагнит импульсное возбуждение.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИЖИТЕЛЬ ДЛЯ ПЕРЕМЕЩЕНИЯ ВНУТРИ ФЕРРОМАГНИТНОГО ТРУБОПРОВОДА | 2000 |
|
RU2165369C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ В РЕВЕРСИВНОЕ ПОСТУПАТЕЛЬНОЕ | 1996 |
|
RU2107205C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ | 2003 |
|
RU2247883C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ВНУТРИ ТРУБОПРОВОДА | 1999 |
|
RU2161752C1 |
| РАСПОРКА ДЛЯ ПРОВОДОВ ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 2002 |
|
RU2205487C1 |
| ВИБРОДВИЖИТЕЛЬ ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ФЕРРОМАГНИТНОЙ ПОВЕРХНОСТИ | 2000 |
|
RU2172696C1 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ ВИБРАЦИЙ ТРУБОПРОВОДА | 2002 |
|
RU2220358C1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2222091C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ | 2000 |
|
RU2184288C1 |
| ВИБРАЦИОННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО | 1996 |
|
RU2121954C1 |

Изобретение относится к области транспорта и может быть использовано в качестве транспортного средства при неразрушающем контроле трубопроводов для перемещения дефектоскопического оборудования. Устройство содержит привод возвратно-поступательного движения и механизм перемещения по внутренней поверхности трубопровода. Механизм перемещения выполнен в виде свободно размещенной внутри трубопровода цилиндрической оболочки из кордной ткани с вывернутыми внутрь концевыми частями. Торцы вывернутых внутрь концевых частей герметично соединены друг с другом по контуру с образованием замкнутой кольцевой упругой камеры, частично заполненной ферромагнитной жидкостью. Привод возвратно-поступательного движения выполнен в виде постоянного магнита, размещенного снаружи трубопровода с возможностью перемещения относительно последнего в продольном и поперечном направлениях, и ферромагнитного диска, установленного концентрично в осевом отверстии кольцевой камеры с возможностью упругого продольного перемещения между ограничителями в пределах длины камеры. Изобретение обеспечивает повышение надежности и упрощение конструкции. 2 ил.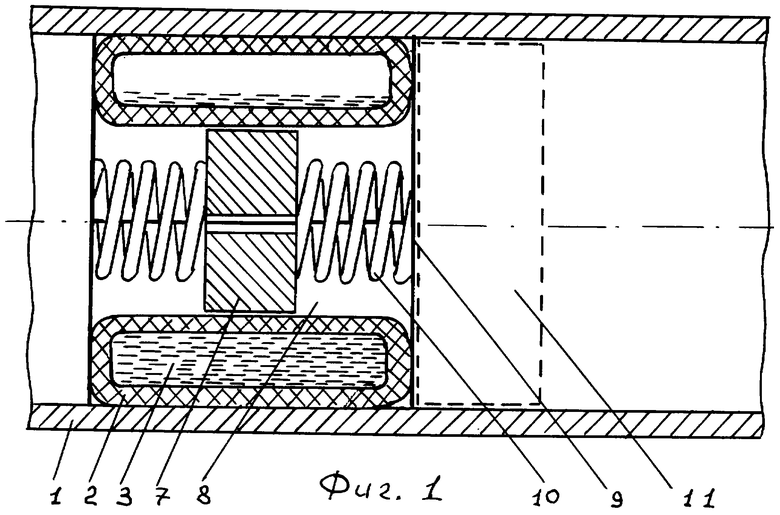
Устройство для перемещения по трубопроводу, включающее привод возвратно-поступательного движения и механизм перемещения по внутренней поверхности трубопровода, отличающееся тем, что механизм перемещения выполнен в виде свободно размещенной внутри трубопровода цилиндрической оболочки из кордной ткани с вывернутыми внутрь концевыми частями, при этом торцы вывернутых внутрь концевых частей герметично соединены друг с другом по контуру с образованием замкнутой кольцевой упругой камеры, частично заполненной ферромагнитной жидкостью, а привод возвратно-поступательного движения выполнен в виде постоянного магнита, размещенного снаружи трубопровода с возможностью перемещения относительно последнего в продольном и поперечном направлениях, а также ферромагнитного диска, установленного концентрично в осевом отверстии кольцевой камеры с возможностью упругого продольного перемещения между ограничителями в пределах длины камеры.
| Устройство для транспортирования грузов по трубопроводу | 1985 |
|
SU1294731A1 |
| Устройство для очистки внутренней поверхности трубопровода | 1990 |
|
SU1741938A1 |
| RU 2066418 C1, 10.09.1996 | |||
| Устройство для зачистки поверхности изделия из диамагнитного материала | 1989 |
|
SU1697913A1 |
| Устройство для обработки текстовой информации | 1974 |
|
SU526901A1 |

