Настоящее изобретение относится в общем случае к способу цифровой связи и системе цифровой связи.
Известная заявителю система слежения за автомобилями, которая используется в Великобритании, позволяет полиции отслеживать и возвращать украденные автомобили. В этой известной системе в автомобиле спрятан небольшой приемопередающий блок. Этот блок активизируется сигналом активизации, чтобы передавать сигналы, когда автомобиль украден. Сигнал активизации генерируется от сети базовых станций. Полицейские автомобили оборудованы приемниками, которые позволяют им принимать сигналы, передаваемые приемопередающим блоком в украденном автомобиле. Таким образом, полиция может следить за автомобилем, определять его местоположение и возвращать украденный автомобиль.
В систему слежения могут быть включены дополнительные и более сложные функции, если между приемопередающим блоком в каждом автомобиле и базовой станцией, обычно ближайшей базовой станцией, имеется двухсторонняя связь, причем эта базовая станция могла бы дополнительно действовать как приемник для приема данных, которые передаются в сигналах от приемопередающего блока. Такая двухсторонняя или дуплексная связь невозможна с помощью известной системы из-за несоразмерности мощности от бортового приемопередающего блока и мощности от базовой станции. В частности, базовые станции имеют передатчики с мощностью 25 Вт и дальностью порядка 30 миль (около 50 км). Каждый бортовой приемопередающий блок имеет передатчик мощностью 1 Вт и максимальной дальностью 1.5 миль (около 2.5 км), которой часто оказывается недостаточно для установления связи с базовой станцией. Невозможно просто увеличить мощность бортовых передающих блоков, так как это увеличило бы их размеры и стоимость, что неприемлемо для рынка.
Чтобы увеличить дальность передачи от бортовых приемопередающих блоков, можно уменьшить ширину полосы передач. Это привело бы к уменьшению скорости, с которой передается информация, но для многих приложений, к примеру, для системы слежения, такое уменьшение скорости приемлемо. Обыкновенно использование передающего блока с уменьшенной шириной полосы увеличивает стоимость каждого приемопередающего блока, поскольку тогда в приемопередающем блоке потребуется использовать высокоточные компоненты. Это имеет место потому, что погрешность или ошибка несущей в частоте передачи обычно должна быть меньше, чем ширина полосы передаваемого сигнала, для того чтобы приемник мог определить местоположение данных. Однако поскольку рынок не приемлет блоки, имеющие существенно более высокую стоимость, то, следовательно, в такого рода приемопередатчике не могут быть использованы высокоточные компоненты.
Настоящее изобретение направлено на увеличение дальности работы передатчика без увеличения его размеров или стоимости. Настоящее изобретение, кроме того, направлено на увеличение дальности передачи сигналов, содержащих данные, от передатчика без увеличения его размеров или стоимости. Настоящее изобретение имеет конкретное применение в системе слежения за автомобилями, но может быть использовано во многих приложениях, особенно там, где используются или требуются дешевые передатчики.
В ЕР-А-0583522 раскрыта дистанционная система определения положения. Пространственное положение множества подвижных приемопередатчиков может быть определено базовой станцией, которая принимает сигналы расположения от подвижных приемопередатчиков. Подвижные приемопередатчики используют режим передачи со скачкообразной перестройкой частоты с расширенным спектром, причем каждый подвижный приемопередатчик имеет свою собственную характеристическую комбинацию скачкообразной перестройки частоты, для того чтобы базовая станция на основе конкретной комбинации скачкообразной перестройки частоты в принимаемом сигнале была способна определить, какой подвижный приемопередатчик ведет передачу. Таким образом, если частота передачи, используемая каждым подвижным приемопередатчиком, является критическим параметром с точки зрения ее правильной идентификации базовой станцией, существенно, чтобы базовая станция передавала на подвижные приемопередатчики синхронизирующие сигналы привязки по времени, а подвижные передатчики соответственно должны быть относительно сложными (и, следовательно, дорогими) в связи с тем, что они должны содержать запоминающие устройства и схемы так, чтобы каждым подвижным приемопередатчиком передавалась нужная частота и комбинация скачкообразной перестройки частоты. Кроме того, сигналы, передаваемые подвижными приемопередатчиками, не модулируются и, следовательно, не содержат каких-либо данных, передаваемых на базовую станцию, поскольку единственной информацией, используемой базовой станцией, является тот факт, что конкретный идентифицированный подвижный приемопередатчик действительно осуществляет передачу. Следовательно, между базовой станцией и подвижными приемопередатчиками нет двухстороннего обмена данными.
В ЕР-А-0550146 раскрыт цифровой процессор для обработки множества аналоговых сигналов, принимаемых соответственно от множества подвижных передатчиков.
Согласно первому аспекту настоящего изобретения предложен способ передачи и приема данных, причем способ содержит этапы: передачи узкополосного сигнала данных на неизвестной частоте внутри известного диапазона частот; приема этого сигнала данных внутри известного диапазона частот; разделения в приемнике диапазона частот на множество частотных полос, каждая из которых имеет ширину, меньшую погрешности в частоте передачи сигнала данных; обнаружения наличия указанного сигнала данных в по меньшей мере одной из указанных частотных полос и демодуляции обнаруженного сигнала данных.
Этап демодуляции предпочтительно включает в себя этап центрирования по меньшей мере одного узкополосного фильтра на частотных полосах обнаруженных сигналов данных.
Частоту этого или каждого узкополосного фильтра на этапе демодуляции предпочтительно определяют на этапе обнаружения.
Время сигналов данных в узких полосах частот предпочтительно определяют на этапе обнаружения и используют на шаге демодуляции.
В наиболее предпочтительном варианте осуществления настоящего изобретения этап обнаружения наличия сигналов данных по меньшей мере одной из частотных полос содержит этап обнаружения наличия сигнала данных во множестве частотных полос, причем амплитуду этого сигнала данных в каждой полосе сравнивают с нормированным значением для определения оценки качества сигнала данных в каждой полосе.
Передаваемый сигнал данных предпочтительно включает в себя флаговую последовательность, а вычисление "центра тяжести" предпочтительно выполняют по оценкам качества, чтобы получить центральную частоту и центральное время для каждой флаговой последовательности, причем результаты вычисления центра тяжести используют во время демодуляции сигнала данных.
Частота передаваемого сигнала данных может быть варьирована между следующими друг за другом передачами. Это обеспечивает прием полезного сигнала, даже если на конкретной частоте имеются помехи в линии передачи, так как последующая передача будет выполнена на частоте, на которой маловероятно воздействие тех же самых помех.
Сигнал данных предпочтительно передают в виде двух подканалов, причем этапы обнаружения и демодуляции выполняют на каждом подканале, при этом соответствующие демодулированные сигналы данных взвешивают и суммируют в соответствии с качеством сигналов, определенных на этапах обнаружения.
Принимаемый сигнал может включать в себя множество узкополосных сигналов данных, каждый из которых занимает отдельную часть канала, при этом приемник принимает указанные узкополосные сигналы данных по существу параллельно. Это позволяет приемнику принимать передачи от нескольких приемопередающих блоков по существу параллельно.
Вслед за каждым этапом обнаружения может быть выполнено множество этапов демодуляции.
Один вариант осуществления настоящего изобретения повышает эффективную дальность передатчика путем обеспечения в сущности узкополосной связи между передатчиком и приемником. Это увеличивает дальность при этой же самой мощности, но с некоторым уменьшением скорости передачи данных, которая может быть использована, так как узкополосная связь обеспечивается способами обработки сигналов в приемнике, нет необходимости иметь более точный, а следовательно, более дорогой узкополосный передатчик.
В одном варианте осуществления изобретения сигналы данных модулируют в передатчике путем использования прямой ЧМН (частотная манипуляция) модуляции.
Сигнал данных предпочтительно содержит пакет данных, следующий за флаговой последовательностью разрядов, а на этапе обнаружения обнаруживают существование флаговой последовательности. В настоящем предпочтительном варианте осуществления сигналы данных в отдельных узких полосах частот сравнивают с желаемым флаговым сигналом с регулярными интервалами. В результате этих сравнений получают данные о точной привязке по времени, частоте и качестве, что позволяет оптимизировать этап обнаружения.
Для надежности обнаружения предпочтительно выполнять передачу пакета данных между начальной и хвостовой флаговыми последовательностями, а этап обнаружения требует обнаружения обеих флаговых последовательностей.
Предпочтительно требуется, чтобы для подтверждения наличия пакета данных были обнаружены как начальная, так и хвостовая флаговые последовательности. Это значительно уменьшает вероятность ложных обнаружений. Кроме того, из флаговой последовательности определяют информацию о частоте и привязке по времени для этапа демодуляции. Наличие флаговой последовательности перед и после каждого пакета данных позволяет использовать частоты и привязку по времени при демодуляции для повторных измерений с регулярными интервалами.
Сигнал данных может иметь множество пакетов данных, отделенных друг от друга флаговыми последовательностями. Таким образом, если имеется n пакетов данных, то в сигнале данных будет n+1 флаговых последовательностей. Использование фаланговых последовательностей как средства обнаружения наличия данных и обеспечения информации о частоте и привязке по времени для разрешения их демодуляции означает, что внешняя синхронизация между передающим блоком и приемником не требуется.
В предпочтительном варианте осуществления этап обнаружения наличия сигналов данных в отдельных узких полосах частот содержит этап обнаружения наличия флаговой последовательности во множестве узких полос частот, причем амплитуду разрядов флаговой последовательности в каждой полосе сравнивают с нормированным значением, чтобы определить оценку качества разрядов флаговой последовательности в каждой полосе, при этом строят график зависимости оценок качества от частоты и времени.
Предварительно выполнять вычисление "центра тяжести" по оценкам качества, чтобы получить центральную частоту и центральное время для каждой флаговой последовательности, причем результаты вычисления центра тяжести используют при демодуляции сигнала данных.
Согласно второму аспекту настоящего изобретения предложено устройство для передачи и приема и демодуляции передач, причем устройство содержит передатчик для передачи узкополосного сигнала данных на неизвестной частоте внутри известного диапазона частот и приемник для приема сигнала данных внутри известного диапазона частот, причем приемник имеет средство для разделения диапазона частот на множество частотных полос, каждая из которых меньше погрешности в частоте передачи сигнала данных; средство для обнаружения наличия указанного сигнала данных в по меньшей мере одной из указанных частотных полос и средство для демодуляции обнаруженного сигнала данных.
Согласно третьему аспекту настоящего изобретения предложен способ приема данных, передаваемых в виде узкополосного сигнала данных с неизвестной частотой внутри известного диапазона частот, причем способ содержит этапы приема сигнала данных внутри известного диапазона частот; разделения в приемнике диапазона частот на множество частотных полос, каждая из которых меньше погрешности в частоте передачи сигнала данных; обнаружения наличия указанного сигнала данных в по меньшей мере одной из указанных частотных полос и демодуляции обнаруженного сигнала данных.
Согласно четвертому аспекту настоящего изобретения предложен приемник для приема и демодуляции сигнала данных, передаваемого на неизвестной частоте внутри известного диапазона частот, причем приемник содержит средство для разделения диапазона частот на множество частотных полос, каждая из которых меньше погрешности в частоте передачи сигнала данных; средство для обнаружения наличия указанного сигнала данных в по меньшей мере одной из указанных частотных полос и средство для демодуляции обнаруженного сигнала данных.
В предпочтительном варианте осуществления указанный приемник содержит аналого-цифровой преобразователь (АЦП), а указанное средство разделения содержит быстрое преобразование Фурье (БПФ).
В одном варианте средство демодуляции содержит средство фильтрации, установленное для пропускания только центральной частоты, определенной указанным средством обнаружения.
Предпочтительно указанное разделение, указанное обнаружение и указанную демодуляцию выполнять в цифровом виде в процессе цифровых сигналов.
Предпочтительно, чтобы приемник имел средства обнаружения и демодуляции для обнаружения и демодуляции сигналов данных, передаваемых по двум подканалам, и предпочтительно, чтобы он дополнительно содержал средство сложения для взвешивания и суммирования соответствующих демодулированных сигналов данных в соответствии с качеством сигналов, определенным на шагах обнаружения.
Обеспечивая действительный двухсторонний обмен данными между базовой станцией (которая может иметь относительно высокую мощность и быть дорогой) и множеством приемопередатчиков (которые могут иметь низкую мощность и быть дешевыми), настоящее изобретение существенно повышает значимость и полезность цифровой системы связи. Например, если приемопередатчик был активизирован базовой станцией, то этот приемопередатчик может послать сигнал данных на базовую станцию для подтверждения того, что он активизирован, тем самым обеспечивая базовой станции гарантию того, что сигнал активизации принят, и позволяя базовой станции не повторять этот сигнал много раз для обеспечения его принятия, как это делалось в прошлом. На приемопередатчик может быть послан сигнал деактивизации, который также может быть подтвержден приемопередатчиком, так что базовая станция может убедиться, что сигнал деактивизации был принят и предотвратить тем самым поддержку ложных или ошибочных активизаций. На базовую станцию также могут быть посланы данные, касающиеся состояния приемопередатчика (такие как состояние приемопередающего блока, напряжения его батареи и т.п.), в результате чего базовая станция сможет непрерывно контролировать состояние приемопередающего блока. Время от времени базовая станция может посылать тестовые сигналы на каждый приемопередающий блок для обеспечения гарантии того, что эти блоки правильно работают, при этом приемопередающие блоки способны соответственно на это реагировать; в известной из уровня техники системе слежения за автомобилями, описанной выше, существует, к примеру, только один способ тестирования приемопередающего блока - путем регулярной доставки автомобиля для технического обслуживания и тестирования каждого блока посредством выполнения физических соединений с этим блоком во время каждого обслуживания.
Настоящее изобретение конкретно применимо к системе слежения за автомобилями. Так, может быть предложена система отслеживания автомобилей, имеющая систему или приемник согласно любому из аспектов, описанных выше. Также может быть обеспечен способ передачи и приема данных или способ приема данных, описанный выше, в системе отслеживания автомобилей.
Далее раскрыт в качестве примера вариант осуществления настоящего изобретения со ссылками на сопроводительные чертежи, на которых:
фиг.1 - приемник системы связи согласно изобретению;
фиг.2 - принимаемый сигнал, преобразованный до промежуточной частоты;
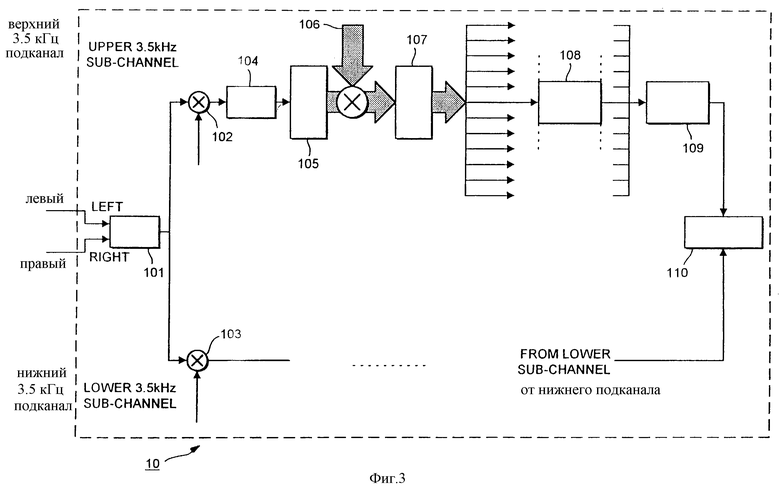
фиг.3 - схема процесса обнаружения в ПЦС (профессор цифровых сигналов);
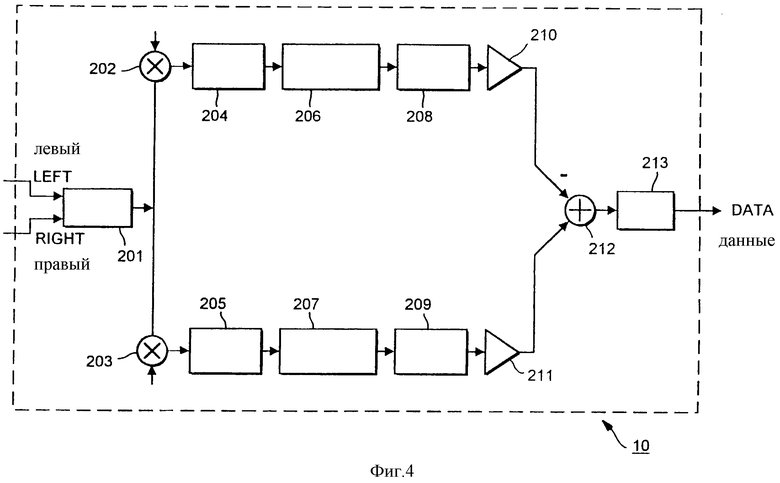
фиг.4 - схема процесса демодуляции в ПЦС;
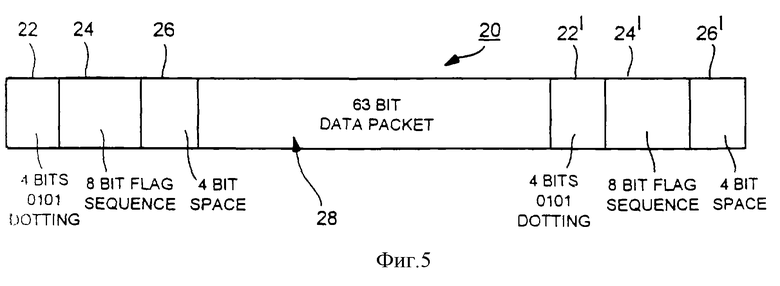
фиг.5 - сигнал данных, принимаемый приемником;
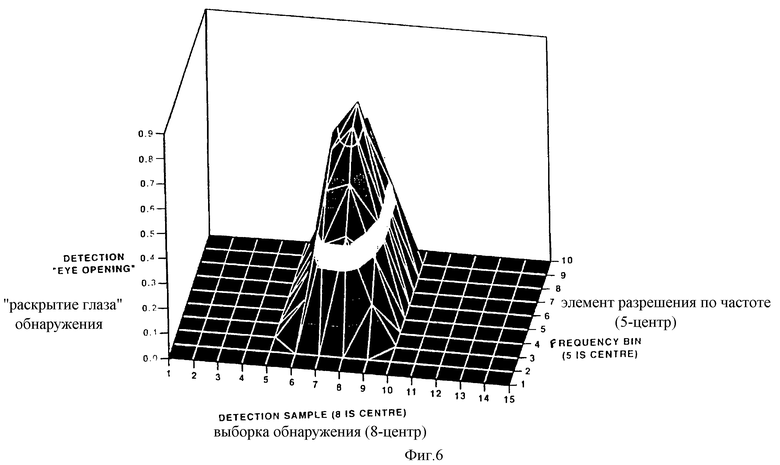
фиг.6 - "пятно" обнаружения и иллюстрация вычисления центра тяжести.
Описанные здесь приемник и системы связи имеют общее применение. Однако для ясности эти системы и способы описаны конкретно применительно к использованию в системе отслеживания для возвращения украденных автомобилей. Тем не менее очевидно, что изобретение не ограничено указанной системой отслеживания. К примеру, настоящее изобретение может быть применено для дистанционного снятия показаний электросчетчиков либо счетчиков других применений; низкоскоростной телеметрии от удаленных (например, не питаемых от электросети) установок, таких как водные резервуары; от персональных сигнализаторов безопасности или сигнализаторов повреждений имущества либо защитных сигнализаторов от нападения, к примеру, от попытки изнасилования, сигнализаторов для спасения в горах и т.п.; для систем безопасности зданий, маломощной беспроводной аварийной сигнализации, соединения сигнализации здания с государственной централизованной системой контроля; для дистанционного управления в домашнем хозяйстве, к примеру, для управления электроприборами; и системы связи не по радиоканалам, где используется, например, передача сигналов через сеть электропитания.
Способы, раскрытые ниже, позволяют использовать по существу известный маломощный передающий или приемопередающий блок для обеспечения двухсторонней связи. В частности, в описанном конкретном примере способы, раскрытые ниже, позволяют использовать по существу известный маломощный приемопередающий блок для обеспечения двухсторонней бортовой связи автомобиля, но при этом с повышенной дальностью, сравнимой с дальностью базовой станции. Дальность приемопередатчика возрастает за счет уменьшения ширины полосы частоты посредством эффективного уменьшения ширины полосы только у приемника, хотя приемопередающий блок по прежнему ведет передачу на той же самой полосе. Следовательно, единственное изменение, которое необходимо сделать в передающем блоке, - это уменьшить скорость передачи, поскольку система будет вести себя так, как если бы в действительности велась узкополосная передача. Как раскрыто ниже, в приемнике принимаемый канал разделен на ряд узких полос, в каждой из которых может быть обнаружена и демодулирована информация. Использование узкой полосы частот в приемнике имеет то преимущество, что уменьшается воздействие шума, поскольку белым шум по определению имеет равномерное распределение энергии по ширине полосы.
В конкретном примере мощность, передаваемая бортовым приемопередающим блоком, в 25 раз меньше, чем мощность базовой станции. Приемник на базовой станции должен обеспечить усиление, чтобы это компенсировать, плюс дополнительное усиление, чтобы соответствовать возросшим уровням шума и помех. Кроме того, передачи могут быть зашумлены другими передачами, к примеру, от других передающих блоков, находящихся поблизости от данной базовой станции.
В одном варианте выполнения бортовой приемопередающий блок имеет центральную несущую частоту в ОВЧ (очень высокая частота) диапазоне с шириной канала 12.5 кГц и осуществляет передачу с относительно низкой мощностью 1 Вт. Данные, передаваемые отдельным приемопередающим блоком, модулируют на несущий сигнал посредством частотной манипуляции (ЧМН) с отклонением ±2.5 кГц и скоростью передачи 55.8 бит в секунду. ЧМН модуляция с такой низкой скоростью передачи данных создает спектр, который имеет вид двух узкополосных АМ (амплитудная модуляция) спектров, разделенных интервалом 5 кГц, причем одна полоса данных является инвертированной по отношению к другой, поскольку в большой степени можно считать, что передаваемые данные передаются либо только в более высокой, либо только в более низкой полосе, создаваемой в процессе ФМН. Более высокая полоса определена для размещения инвертированной последовательности.
Предпочтительно, чтобы центральная частота для передачи от приемопередающего блока слегка варьировалась ("дрожала") на последующих пакетах сообщений с тем, чтобы, если сообщение будет зашумлено помехами в линии передачи на одной частоте передаваемого сигнала данных, можно было с высокой вероятностью получить это сообщение посредством следующего передаваемого сигнала данных. В этой связи диапазон центральных частот ограничен до ±250 Гц.
На фиг.1 показана архитектура одного варианта осуществления приемника 1 на базовой станции. В общем случае приемник 1 содержит секцию 2 аналогового приемника, подсоединенную к секции 4 обработки сигналов. Приемник 1 предпочтительно имеет линейную характеристику и предпочтительно не имеет обычный ЧМ (частотная модуляция) дискриминатор, поскольку иначе данные могут быть потеряны, так как уровень сигнала данных обычно намного ниже, чем уровень шума.
Секция 2 аналогового приемника содержит преобразователь 6 с понижением частоты, который преобразует несущую частоту принимаемого сигнала данных в промежуточную частоту (ПЧ). Значение ПЧ может быть, например, 14 или 15 кГц, что позволяет использовать известный дешевый стерео-аудио аналого-цифровой преобразователь (АЦП) 8, на который сигнал данных подается непосредственно преобразователем 6 с понижением частоты.
На фиг.2 показан спектр преобразованного сигнала данных, который выдается преобразователем 6 с понижением частоты, прежде чем он преобразован в цифровую форму АЦП 8. Как можно видеть, преобразованный сигнал данных имеет подканал с каждой стороны ПЧ, причем нижний подканал имеет центральную частоту f1, а верхний подканал имеет центральную частоту fu, которые разделены 5 кГц. Каждый подканал или полоса имеет в данном примере разброс частоты 3.57 кГц.
Преобразованный сигнал данных поступает от преобразователя 6 как на левый, так и на правый стереовходы АЦП 8, где они преобразуются в цифровую форму с частотой дискретизации 57 кГц. Как показано на фиг.1 и более детально на фиг. 3, левый и правый выходные сигналы АПЦ 8 поступают на процессор 10 цифровых сигналов (ПЦС) в секции 4 обработки сигналов через синхронный последовательный порт 14. Эти левый и правый сигналы суммируются в ПЦС 10 и преобразуются в числовой формат с плавающей точкой, как показано на позиции 101. Это суммирование сигналов служит для подавления по меньшей мере некоторой части шума, который генерируется в АЦП 8. Результирующие значения записывают в память для последующей демодуляции, как будет более подробно описано ниже. ПЦС 10 может работать с блоками выборок, записывая, к примеру, в память несколько блоков, пока обрабатываются другие блоки. Это дает возможность принимать передачи от нескольких бортовых приемопередатчиков и действовать фактически одновременно с помощью одного приемника базовой станции.
Затем значение из секции 101 ПЦС 10 смешивают с двумя локальными цифровыми генераторами 102, 103 так, что создаются два набора данных на разных частотах. Последующее описание относится к шагам обнаружения и, хотя здесь конкретно описан набор данных верхнего подканала, очевидно, что те же самые операции выполняют с набором данных нижнего подканала, причем предпочтительно одновременно.
Подканал подвергают фильтрации, чтобы пропустить только требуемую подканальную частоту и прореживают (то есть уменьшают) с коэффициентом 8, как показано на позиции 104. Это сокращает 256 выборок из АЦП 8 до 32 выборок, и эти значения запоминают вместе с предыдущими 480 выборками в буфере 105. Данные в буфере 105 организуют в окно заранее определенной формы 106 так, что применяемое к этим данным быстрое преобразование Фурье (БПФ) 107 реализует перекрывающийся набор полосовых фильтров. Каждый созданный таким образом полосовой фильтр имеет узкую полосу ±33 Гц, и полосовые фильтры перекрываются с разделением 14 Гц.
БПФ выполняется один раз с 256 необработанными выборками от АЦП 8. Средние 256 частотных выходных сигналов БПФ 107 представляют подканал, причем каждый сигнал отделен 14 Гц в соответствующем элементе разделения по частоте. Для каждого из 256 выходных сигналов выполняют тест на добротность соответствия с использованием предыдущих значений от предыдущих прерываний, как показано на позиции 108. Выходной сигнал от БПФ 107 на каждой частоте тестируют при сопоставлении с идеальным представлением известной флаговой последовательности; эта флаговая последовательность будет описана дополнительно ниже со ссылками на фиг.5. Выходной сигнал тестируют для определения, где можно ожидать наличия и где ожидать отсутствия энергии. Положительный результат оценки добротности соответствия будет тогда, когда полагается, что минимальная энергия в выборке, где ожидают наличие энергии, превосходит максимальную энергию, где не ожидают наличия энергия. Эта мера нормируется по уровню сигнала и называется раскрытие "глаза" ("eye opening").
Когда в данных присутствует флаговая последовательность, раскрытия глаза появляются через несколько частот, поскольку ширина полосы фильтра БПФ больше, чем разнесение выходных частот. Раскрытие глаза появляется через несколько временных интервалов, так как данные в этой точке четырехкратно передискретизируют. Обычно обнаружение флаговой последовательности возникает на трех или четырех временных позициях. Дополнительно, качественное обнаружение флаговой последовательности вероятно охватывает вплоть до шести элементов разрешения по частоте.
Наличие флаговой последовательности вызовет таким образом пик или "пятно" ("blob") в пространстве частота/время, которое представлено в качестве примера на фиг.6. Для измерения центра пика используют алгоритм 109 "центра тяжести" с гораздо большей точностью по частоте, чем частотное разнесение выходных сигналов БПФ, и символьное время до 1/32 бита. Также записывают всю "массу" пика, чтобы обеспечить качественное измерение пика. Этот расчет повышает способность различать действительные и ложные сигналы и увеличивает точность частотных и временных оценок для последующей демодуляции.
Затем эти измеренные параметры используют для создания нового процесса демодуляции, как показано на позиции 110 на фиг.3. На этом этапе любой совпадающий пик, обнаруженный в нижнем подканале, объединяют с пиком верхнего подканала, если времена и частота обнаружения находятся внутри заранее определенных пределов. Однако хотя посредством использования верхнего и нижнего подканалов шум, если это возможно, может быть уменьшен, процесс демодуляции не требует обнаружения в обоих, верхнем и нижнем, подканалах, а достаточно обнаружение только в одном подканале.
После завершения процесса обнаружения ПЦС 10 имеет достаточно времени, чтобы выполнить процесс числовой демодуляции, прежде чем должна быть выполнена следующая процедура обнаружения. Эти процессы демодуляции выполняют последовательно. Процесс демодуляции продолжают для 63 разрядов данных. Поскольку процедуру обнаружения выполняют каждую 1/4 разряда, любой один процесс демодуляции будет продолжаться в течение 252 прерываний, тем самым постепенно восстанавливая данные.
Обратимся к фиг. 4, где каждый процесс демодуляции выполняется теми же необработанными данными, что и процесс обнаружения, описанный со ссылками на фиг.3. Процесс демодуляции использует суммарные плавающие значения, вычисляемые при обнаружении на шаге 101 по фиг.3; шаг, указанный позицией 201 на фиг. 4, идентичен шагу, указанному позицией 101 на фиг.3. При демодуляции желаемый сигнал обрабатывается узкополосным фильтром и частота выборки уменьшается настолько, что создается только один разряд данных и только 1 за 4 раза выполнения этого процесса.
В частности, входной набор выборок смешивают соответствующим образом, как показано по позициям 202 и 203, так что желаемый сигнал в верхнем подканале будет сигналом постоянного тока, а также желаемый сигнал в нижнем подканале будет сигналом постоянного тока. Это достигается смесителями 202, 203, изменение фазы которых на одну выборку точно вычисляют по измеренным частотам процесса обнаружения, описанного выше.
Поскольку желаемые сигналы были преобразованы до сигналов постоянного тока, то через низкочастотные фильтры может проходить каждый из двух потоков данных, а частота дискретизации может быть значительно "прорежена" или уменьшена, как показано на позициях 204, 205. Затем может быть установлена на 1/32 привязка по времени для разряда каждого сигнала с помощью соответствующих линий 206, 207 переменной задержки. Длину этой линии задержки определяют заранее исходя из привязки по времени, получаемой из процесса обнаружения, описанного выше. Затем потоки данных дополнительно подвергают низкочастотной фильтрации и частоту выборки уменьшают, как показано на позициях 208, 209, так что окончательные значения получают только по 1-й из 4-х операций процесса. Когда значения получены, результаты верхнего и нижнего подканалов комбинируют с соответствующими весами, получаемыми из процесса обнаружения в соответствии с качеством сигналов, как показано на позициях 210 и 211, а затем суммируют, как показано на позиции 212. Затем принимают решение, как показано на позиции 213, о том, что представляет ли результирующее значение разряд "1" или разряд "0", и это значение тестируют по порогу, который также получают из процесса обнаружения.
Отдельные разряды из процесса демодуляции собирают в полные сообщения, которые затем передают из ПЦС 10.
На фиг. 5 показана структура простого сообщения, передаваемого из бортового передающего блока, здесь в виде одного пакета данных. Как представлено, каждый сигнал данных 20 имеет 4-разрядную последовательность 22 точки 0101, за которой следует 8-разрядная флаговая последовательность 24, за которой следует 4-разрядная последовательность 26 из нулей или пробелов 0000. В этом примере 8-разрядная флаговая последовательность 24 есть 10001101. Для того чтобы повысить эффективность в процессе обнаружения, алгоритм обнаружения ищет удлиненную 10-разрядную последовательность, начинающуюся с последней единицы последовательности 22 точки и оканчивающуюся первым нулем нулевой последовательности 26. Таким образом алгоритм обнаружения ищет 10-разрядную удлиненную последовательность 1100011010.
За последовательностью точки, флаговой последовательностью и нулевой последовательностью 22, 24, 26 следует пакет 28 данных из 63 разрядов данных, а затем за пакетом 28 данных идут соответственно последовательность точки, флаговая последовательность и нулевая последовательность 22', 24' и 26'. Хвостовые последовательности используют для подтверждения наличия пакета 28 данных, что позволяет таким образом избежать ложных обнаружений.
Приемопередатчиком на борту автомобиля в одном сообщении может быть послано множество пакетов данных. Каждый пакет данных отделен от следующего и предыдущего пакета данных флаговой последовательностью, причем флаговые последовательности имеются в начале и в конце сообщения с тем, чтобы каждый пакет данных мог быть правильно обнаружен. Таким образом, если имеется n пакетов данных, то имеется n+1 флаговых последовательностей.
В приведенном выше описании сделаны ссылки на конкретные частоты и размеры каналов. Однако, очевидно, что они даны лишь в качестве примера и, если это необходимо, то могут быть использованы альтернативные значения. Кроме того, очевидно, что вышеописанная аппаратная и программная реализация являются лишь примерами и что в рамках объема настоящего изобретения могут быть сделаны модификации и изменения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОПЕРЕХОДНЫЕ ПАКЕТНЫЕ СЕТИ РАДИОСВЯЗИ | 1995 |
|
RU2157591C2 |
| ПОДАВЛЕНИЕ ПОМЕХ В ТРАФИКЕ | 2005 |
|
RU2369964C2 |
| МНОГОПЕРЕХОДНЫЕ ПАКЕТНЫЕ СЕТИ РАДИОСВЯЗИ | 1995 |
|
RU2249916C2 |
| МНОЖЕСТВО СОВМЕСТИМЫХ OFDM-СИСТЕМ С РАЗЛИЧНЫМИ ПОЛОСАМИ ПРОПУСКАНИЯ | 2008 |
|
RU2470472C2 |
| СПОСОБ, УСТРОЙСТВО И ИНТЕРФЕЙС СВЯЗИ ДЛЯ ОТПРАВКИ И ПРИЕМА БЛОКОВ ДАННЫХ, АССОЦИАТИВНО СВЯЗАННЫХ С РАЗЛИЧНЫМИ МЕТОДИКАМИ КОЛЛЕКТИВНОГО ДОСТУПА | 2005 |
|
RU2394396C2 |
| СОВМЕСТНОЕ ПОДАВЛЕНИЕ ПОМЕХ В КАНАЛЕ ПЕРЕДАЧИ ПИЛОТ-СИГНАЛОВ, В КАНАЛЕ ПЕРЕДАЧИ СЛУЖЕБНЫХ СИГНАЛОВ И В КАНАЛЕ ТРАФИКА | 2005 |
|
RU2387077C2 |
| МЕТОДЫ НИСХОДЯЩЕЙ ЛИНИИ СВЯЗИ И СИНХРОНИЗАЦИИ ДЛЯ УЗКОПОЛОСНОЙ БЕСПРОВОДНОЙ СВЯЗИ | 2016 |
|
RU2726872C2 |
| ПЕРЕМЕЖЕНИЕ ДЛЯ МУЛЬТИПЛЕКСИРОВАННЫХ ДАННЫХ | 2002 |
|
RU2315432C2 |
| ПЕРЕДАЧА СИГНАЛОВ ИНДИКАТОРА КОМБИНАЦИИ ТРАНСПОРТНЫХ ФОРМАТОВ | 2002 |
|
RU2305901C2 |
| ПЕРЕДАЧА И ДЕМОДУЛЯЦИЯ В ШИРОКОВЕЩАТЕЛЬНОМ КАНАЛЕ | 2018 |
|
RU2733211C1 |

Изобретение относится к цифровой связи. Техническим результатом является увеличение дальности работы передатчика без увеличения его размеров и стоимости. В заявленном способе и системе сигналы данных передают на неизвестной частоте внутри известного диапазона частот. В приемнике диапазон частот разделяется на множество частотных полос, каждая из которых имеет ширину, меньшую погрешности в частоте передачи сигнала данных. В, по меньшей мере, одной из частотных полос обнаруживается наличие сигнала данных, и обнаруженные сигналы данных демодулируются. Таким образом, может быть использован дешевый приемопередатчик, позволяющий обеспечить двухстороннюю связь между приемником и приемопередатчиком. 8 с. и 42 з.п.ф-лы, 6 ил.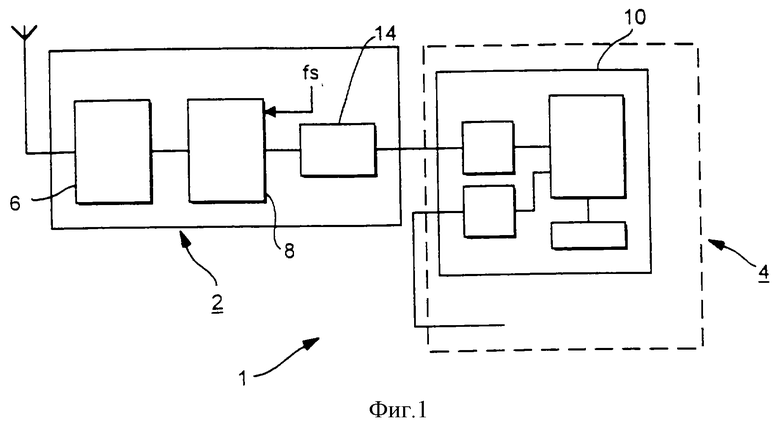
| Устройство для оценки морозоустойчивости древесных растений | 1975 |
|
SU550146A1 |
| RU 94009502 А1, 20.04.1996 | |||
| Непосредственный преобразователь частоты с искуственной коммутацией | 1976 |
|
SU583522A1 |
| RU 94021084 А1, 27.02.1996 | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| DE 4425713 С, 20.04.1995. | |||
