Настоящее изобретение относится к вариообъективу с конечным расстоянием L от предметной плоскости 0 до плоскости 0' изображения, имеющему три установленных последовательно в направлении формирования изображения и подвижных в осевом направлении компонента, первый из которых, если смотреть в указанном направлении формирования изображения, обладает положительной оптической силой, второй обладает отрицательной оптической силой и третий обладает положительной оптической силой.
В зависимости от получаемого оптического изображения оптические системы подразделяют на системы с изменяемым масштабом для конечного расстояния от предметной плоскости до плоскости изображения, на системы с бесконечным расстоянием от предмета или изображения и конечным расстоянием от изображения или предмета соответственно и на системы с бесконечным расстоянием от предмета и изображения. Подобные системы различаются закономерностями их динамики, а также целевыми параметрами, определяющими масштаб и изменение масштаба. Для конечного расстояния от предметной плоскости до плоскости изображения масштаб обычно определяется отношением высоты изображения к высоте объекта, называемым обычно увеличением или масштабом изображения. Для систем с бесконечным передним отрезком в пространстве предметов обычно указывают фокусное расстояние. В системах с конечным отрезком в пространстве предметов и бесконечным расстоянием от изображения в качестве параметра используют оптическую силу. Для так называемых афокальных систем, фокусное расстояние которых с обеих сторон приближается к бесконечности, указывают отношение тангенсов полевого угла (угла охвата) в пространстве изображений и в пространстве предметов.
Принципиальная конструкция оптических систем с масштабом, варьируемым для различных условий получения оптического изображения, известна как из специальной, так и из патентной литературы.
Подобные объективы, называемые также вариофокальными системами, должны выполнять две следующие задачи: во-первых, изменять масштаб изображения, а во-вторых, компенсировать флуктуацию фокуса, соответственно постоянно обеспечивать четкое и резкое отображение объекта в пространстве изображений.
Настоящее изобретение относится к системам с постоянным конечным расстоянием от предметной плоскости до плоскости изображения. В таких системах всегда требуется использовать по меньшей мере две подвижные в осевом направлении линзы, соответственно два подвижных в осевом направлении набора линз (называемых компонентами объектива), при этом при осевом перемещении одного компонента, что сопровождается изменением увеличения, второй компонент одновременно необходимо перемещать таким образом, чтобы при неизменном положении оптического изображения сохранялась наводка на резкость. Из сказанного следует, что указанные перемещения должны быть взаимосвязаны.
Подобные формирующие изображение системы могут быть монохроматическими или использоваться в очень узкой спектральной области. При этом вполне может оказаться достаточным выполнять отдельные элементы из одинакового материала, служащего оптической средой. При необходимости охватить широкие спектральные области отдельные оптические элементы предпочтительно выполнять ахроматическими. При этом наиболее простым путем является объединение в один набор (компонент) двух линз с различной дисперсией. В последующем описании термин "компонент" используется как для обозначения набора линз, так и для обозначения отдельной линзы. Если нагрузка на одну линзу слишком велика, то ее оптическую силу можно распределить между несколькими элементами, в отношении которых справедливы те же положения динамики. Возможность подобного распределения также включена в объем изобретения.
В случае вариофокальных систем с конечным расстоянием от предметной плоскости до плоскости изображения разработчику оптической системы для ее согласования с теми или иными задачами по получению соответствующих изображений достаточно знать распределение оптической силы и динамические параметры. При этом более точно можно задавать такие параметры, как поле изображения, спектральная область, разрешение и геометрические ограничения. Второстепенное значение имеют последовательность расположения собирающих и рассеивающих элементов в отдельных компонентах и выбор оптических сред.
Вариофокальная система с конечным расстоянием L от предметной плоскости до плоскости изображения описана, например, у Boegehold, "Das optische System des Mikroskops", изд-во Verlag Technik Berlin 1958, стр. 66 и далее. Описанная в этой публикации система имеет, если смотреть в направлении формирования изображения, линзу с положительной оптической силой, линзу с отрицательной оптической силой и снова линзу с положительной оптической силой. Первая и третья линзы неподвижны друг относительно друга и перемещаются совместно. Вторая линза установлена неподвижно. При максимально возможном изменении увеличения в пределах от -0,3 до -3,0 величина флуктуации фокуса в этой системе составляет 1,5 мм. Указанные совместные и только линейные перемещения линз обеспечивают оптическую компенсацию флуктуации фокуса.
Наряду с этим известны также системы с механической компенсацией отклонений в наводке на резкость. Существуют системы, в которых передняя или задняя линза с положительной оптической силой неподвижна, а остальные элементы являются высокодинамичными и сравнительно быстро перемещаются друг относительно друга. Система с менее динамичной механической компенсацией описана в DE 4315630 А1. В этой системе также используются первый компонент с положительной оптической силой, второй компонент с отрицательной оптической силой и третий компонент с положительной оптической силой. Первый и третий компоненты выполнены подвижными в осевом направлении, при этом, однако, третий компонент совершает нелинейные перемещения относительно первого компонента. Для приведения указанных компонентов в движение и управления их перемещением используются кулачки. Вариофокальная система именно этого типа является наиболее близким аналогом настоящего изобретения.
В основу настоящего изобретения была положена задача усовершенствовать вариообъектив указанного в начале описания типа таким образом, чтобы при еще более простой конструкции поддерживать флуктуации фокуса на минимальном уровне, в том числе и при больших расстояниях L от предметной плоскости до плоскости изображения и при больших интервалах увеличения.
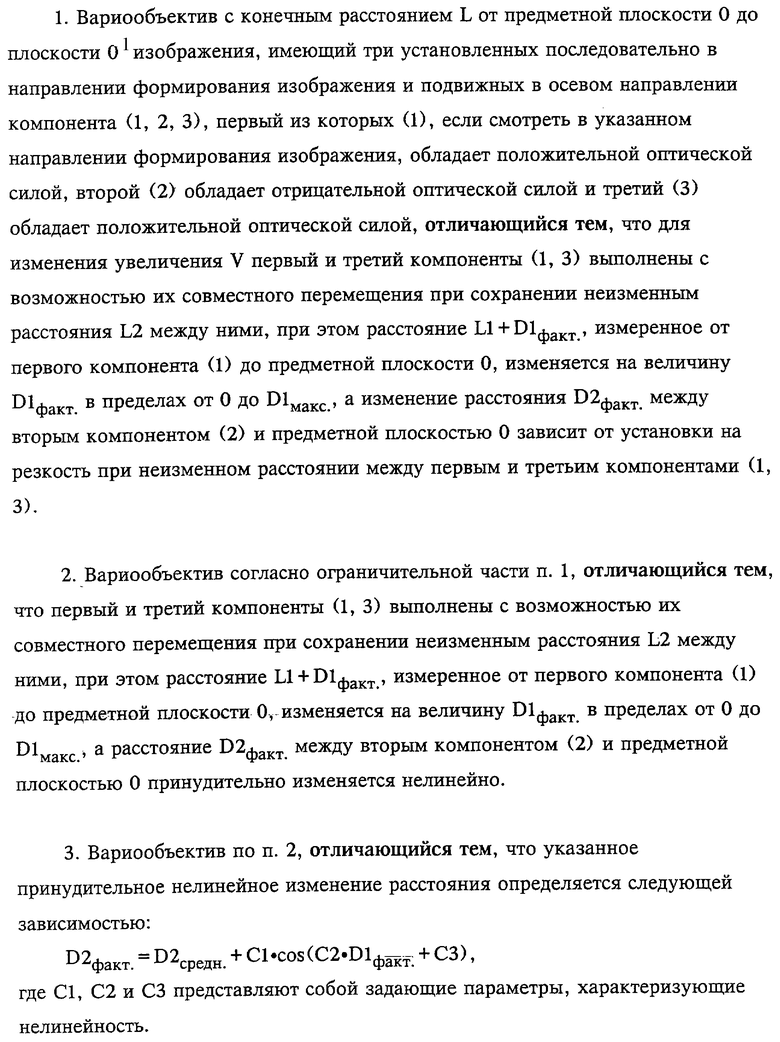
Эта задача решается согласно изобретению благодаря тому, что первый и третий компоненты выполнены с возможностью их совместного перемещения при сохранении неизменным расстояния L2 между ними, при этом расстояние L1+D1факт., измеренное от первого компонента до предметной плоскости О, изменяется на величину D1факт. в пределах от 0 до D1макс., а расстояние D2факт. между вторым компонентом и предметной плоскостью 0 принудительно изменяется по нелинейному закону.
В этом случае перемещение второго компонента может быть описано замкнутой формулой и реализовано с помощью простых приводных средств. Достигается это за счет принудительного описываемого функцией косинуса перемещения второго компонента в зависимости от перемещения первого и третьего компонентов (линз).
В соответствии с изобретением параметры, на основе которых задается закон движения второго компонента, определяется следующей зависимостью
D2факт.=D2средн.+С1•cos(C2•D1факт.+С3),
где C1, C2 и С3 представляют собой задающие параметры.
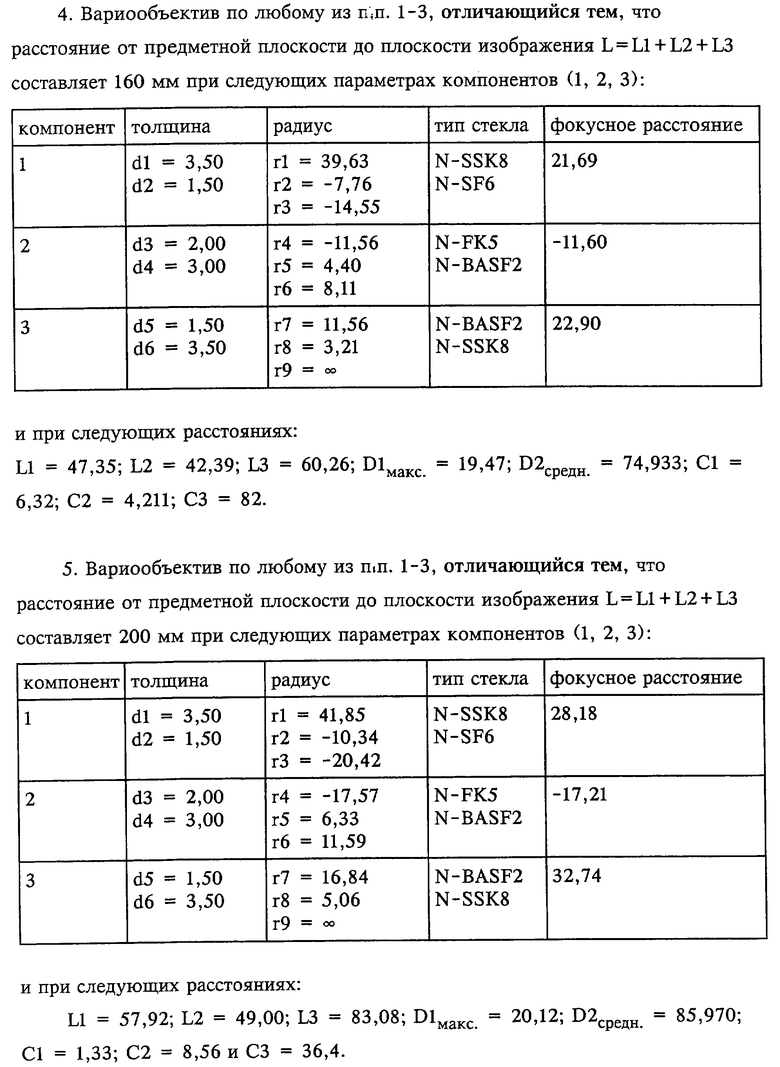
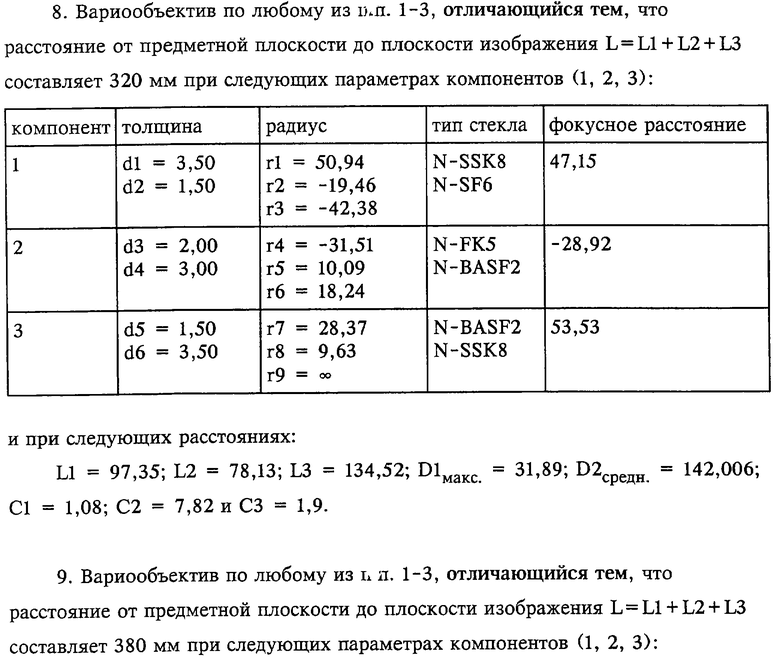
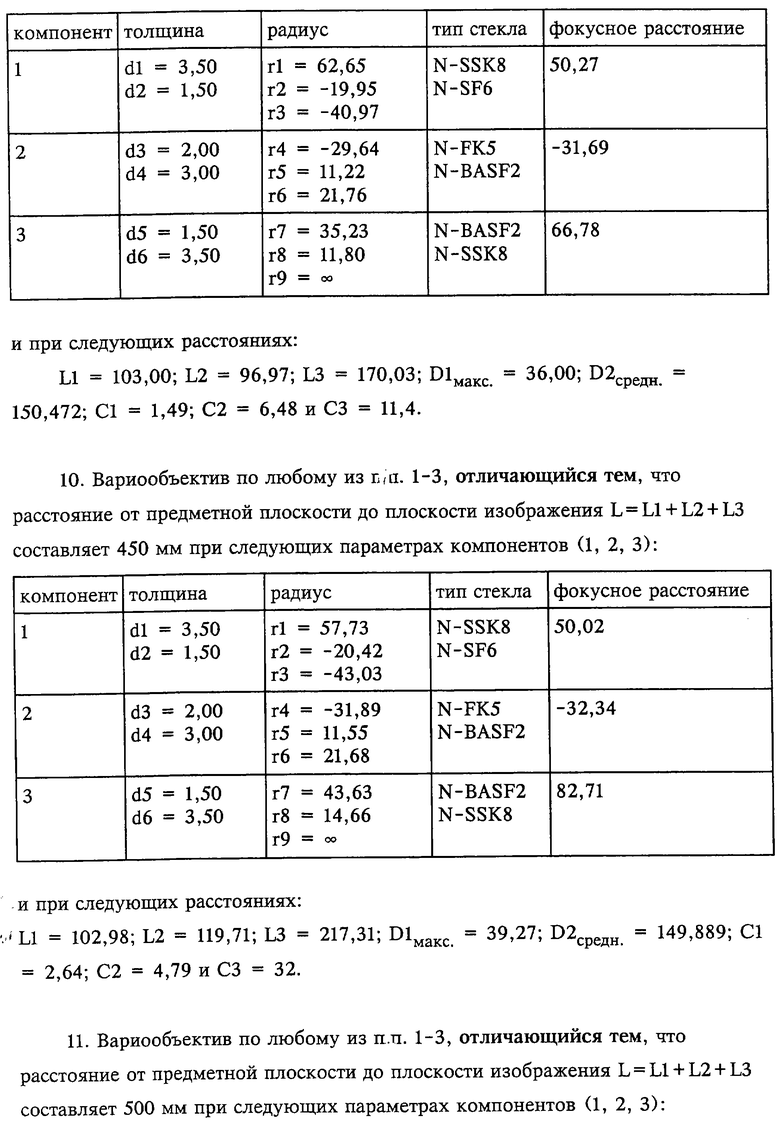
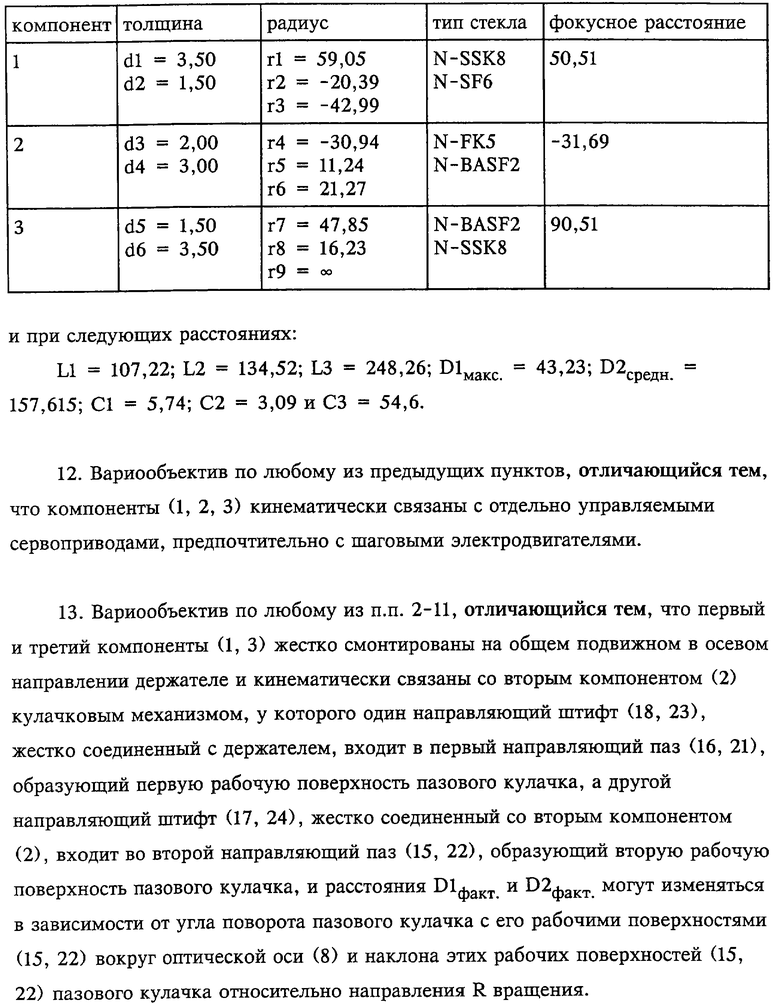
Такая зависимость является достаточно хорошим приближением для точной механической компенсации смещения фокуса. В зависимых пп.4-11 формулы изобретения представлены различные варианты выполнения изобретения, в которых для различных расстояний от предметной плоскости до плоскости изображения в интервале от 160 до 500 мм указаны конкретные параметры компонентов предлагаемого в изобретении вариообъектива.
При этом для расстояний L от предметной плоскости до плоскости изображения, равных 160, 200, 240, 280, 320, 380, 450 и 500 мм, указаны оптические компоненты, а также соответствующее максимально возможное расстояние перемещения D1макс.. Связь между фактическим расстоянием перемещения D1факт., изменяющимся в пределах от 0 до D1макс., и изменением расстояния D2факт. определяется вышеописанной зависимостью с указанием значений D2средн., C1, C2 и С3 для каждого расстояния от предметной плоскости до плоскости изображения. Уставка для точной механической компенсации флуктуации фокуса незначительно отличается от значения, рассчитанного аналитическим путем.
Для приведения указанных трех компонентов в движение можно использовать различные средства. Так, например, управлять перемещением каждого из трех этих компонентов можно по отдельности с помощью шаговых двигателей, при этом скорость перемещения следует задавать с учетом вышеназванных условий.
Однако более предпочтительным является применение кулачковых механизмов, принудительно управляющих перемещениями первого и третьего компонентов, с одной стороны, относительно второго компонента, с другой стороны.
В этом случае первый и третий компоненты можно жестко смонтировать на общем подвижном в осевом направлении держателе и кинематически связать со вторым компонентом кулачковым механизмом. В этом кулачковом механизме один направляющий штифт, жестко соединенный с держателем, входит в первый направляющий паз, образующий первую рабочую поверхность пазового кулачка, а другой направляющий штифт, жестко соединенный со вторым компонентом, входит во второй направляющий паз, образующий вторую рабочую поверхность пазового кулачка, при этом расстояния D1факт. и D2факт. могут изменяться в зависимости от угла поворота пазового кулачка с его рабочими поверхностями вокруг оптической оси.
Согласно следующим вариантам рабочие поверхности пазового кулачка могут быть выполнены на внутренней стенке кулачковой трубки, которая имеет возможность вращения вокруг оптической оси, либо на наружной боковой поверхности кулачкового барабана, имеющего возможность вращения вокруг оси, параллельной оптической оси.
Сравнительно простую механическую конструкцию можно получить в том случае, если выполнить держатель в виде втулки, в которую вставлены застопоренные от проворачивания вокруг оптической оси первый и второй компоненты и наружные поверхности которой при этом скользят по точно пригнанным к ним внутренним поверхностям кулачковой трубки.
При вращении кулачковой трубки вокруг оптической оси взаимодействующие с рабочими поверхностями пазового кулачка направляющие штифты перемещаются ими в осевом направлении, при этом сами направляющие штифты перемещают первый и третий компоненты, соответственно второй компонент. Различие между величиной перемещения D1факт. первого и третьего компонентов и величиной перемещения D2факт. второго компонента задается профилем рабочих поверхностей пазового кулачка, соответственно их наклоном в окружном направлении кулачка относительно направления его вращения.
Приводить кулачковую трубку, соответственно кулачковый барабан во вращение можно вручную или с помощью электромеханического привода. Однако в другом варианте в качестве привода можно использовать сервопривод, для чего, например, держатель можно оснастить зубчатой рейкой с зацепляющейся с ней шестерней, второй компонент соединить толкателем с эксцентриком и установить шестерню и эксцентрик на общем валу.
В этом случае при вращении вала вращение шестерни будет передаваться на зубчатую рейку и преобразовываться при этом в продольное перемещение первого и третьего компонентов. Одновременно с этим вращение вала будет преобразовываться через толкатель в перемещение второго компонента, при этом величина этого перемещения будет определяться профилем рабочей поверхности эксцентрика.
В другом, также предпочтительном варианте на держателе можно предусмотреть проходящую в основном параллельно оптической оси поверхность переменной кривизны, с которой взаимодействует соединенный со вторым компонентом коленчатый рычаг. При осевом перемещении держателя, соответственно кулачка коленчатый рычаг будет отклоняться в соответствии с профилем рабочей поверхности кулачка и передавать это движение второму компоненту.
Ниже изобретение более подробно рассмотрено на примере одного из вариантов его выполнения со ссылкой на прилагаемые чертежи, на которых показано:
на фиг.1 - схема изменения расстояния в зависимости от времени,
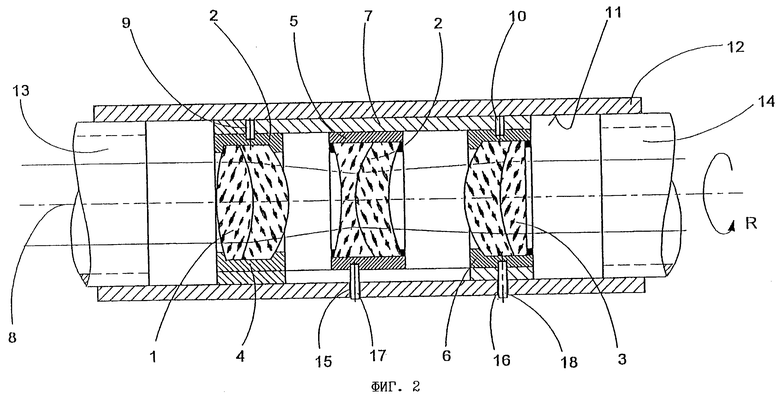
на фиг. 2 - принцип управления перемещением с использованием кулачковой трубки и
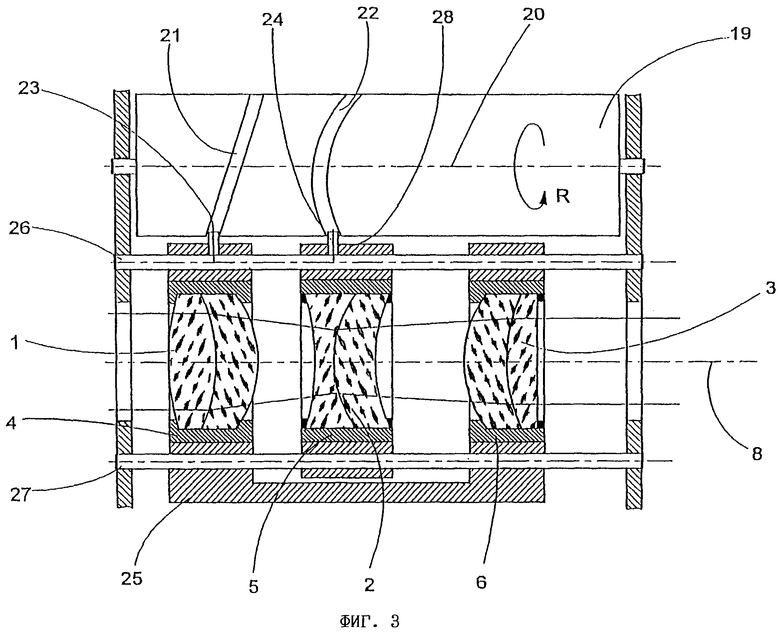
на фиг.3 - принцип управления перемещением с использованием кулачкового барабана.
На фиг.1 показаны расстояния L1, L2 и L3 между компонентами 1, 2 и 3 объектива (т. е. между наборами линз) друг относительно друга, а также расстояния от этих компонентов до предметной плоскости 0, соответственно до плоскости 0' изображения. Кроме того, на этом чертеже показаны величина D1макс., характеризующая перемещение компонентов 1 и 3 в зависимости от времени, а также нелинейное по отношению к нему перемещение компонента 2.
Зависимость между D1факт. и D2факт. задается следующим соотношением:
D2факт.=D2средн.+С1•соs(С2•D1факт.+С3).
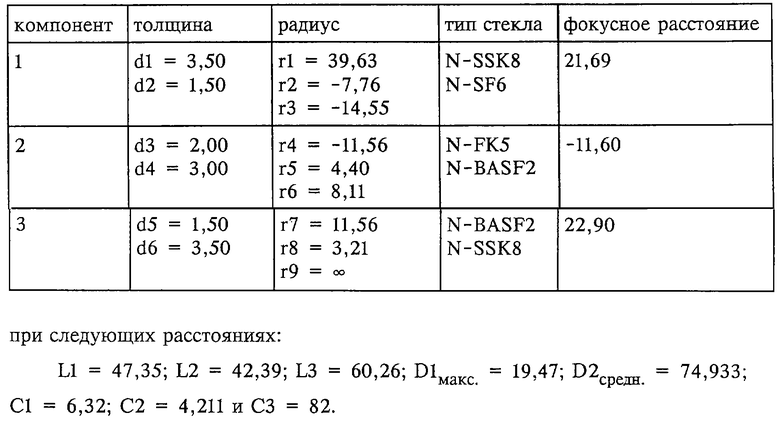
Когда расстояние между предметной плоскостью и плоскостью изображений L= L1+L2+L3 равно, например, 160 мм, компоненты 1, 2 и 3 удовлетворяют параметрам, приведенным в таблице в конце описания.
На фиг.2 схематично показан один из вариантов выполнения предлагаемого в изобретении вариообъектива. В этом варианте каждый компонент 1, 2, 3 заключен в соответствующую оправу 4, 5, 6, которые имеют, например, цилиндрические наружные поверхности одинакового диаметра и вставлены в одну общую втулку 7. Эта втулка 7, равно как и остальные изображенные на этом чертеже элементы, показана в сечении плоскостью, проходящей через оптическую ось 8.
Компоненты 1 и 3 зафиксированы в своем положении внутри втулки 7 штифтами 9 и 10. В отличие от них компонент 2 выполнен подвижным и имеет возможность скользящего перемещения во втулке 7 вдоль оптической оси 8, благодаря чему расстояние от нее до компонентов 1, 3 может изменяться. Все три компонента 1, 2, 3, а также втулка 7 застопорены от проворачивания вокруг оптической оси 8 (не показано).
Втулка 7 опирается наружной поверхностью на внутренние стенки 11 кулачковой трубки 12 с возможностью скольжения в этой трубке, что позволяет прямолинейно перемещать ее вдоль оптической оси 8. При этом вместе со втулкой 7 перемещаются и зафиксированные в ней штифтами 9, 10 компоненты 1, 3. Кулачковая трубка 12 может вращаться на неподвижно установленных на корпусе опорах 13 и 14 вокруг оптической оси 8 в направлении R и в противоположном ему направлении.
В боковой поверхности кулачковой трубки 12 выполнены образующие рабочие поверхности пазового кулачка направляющие пазы 15, 16, в которые входят направляющие штифты 17, 18, при этом направляющий штифт 17 жестко соединен с компонентом 2, а направляющий штифт 18 жестко соединен через втулку 7 с компонентами 1, 3.
При необходимости изменить увеличение вариообъектива кулачковую трубку 12 поворачивают вокруг оптической оси 8, что сопровождается изменением расстояния от компонентов 1, 3 до предметной плоскости 0, соответственно до плоскости 0' изображения. Вращение кулачковой трубки 12 благодаря наклону, предпочтительно постоянному, направляющего паза 16 относительно направления вращения преобразуется направляющим штифтом 18 в прямолинейное перемещение компонентов 1, 3, что позволяет тем самым целенаправленно изменять расстояние D1факт. от 0 до D1макс.
Одновременно вращение кулачковой трубки 12 передается через направляющий штифт 17 на компонент 2. Однако наклон направляющего паза 15 относительно направления вращения не является постоянным (в отличие от направляющего паза 16), а варьируется таким образом, чтобы в зависимости от угла поворота кулачковой трубки расстояние D2факт. целенаправленно изменялось в соответствии с указанной выше функцией.
Иными словами, в отличие от изменения расстояния D1факт. расстояние D2факт. изменяется нелинейно по отношению к углу поворота кулачковой трубки, при этом компонент 2 принудительно перемещается в такое положение, в котором компенсируется смещение фокуса, связанное с изменением увеличения, и изображение остается неизменно четким и резким.
В показанном на фиг.3 варианте выполнения изобретения вместо кулачковой трубки предусмотрен кулачковый барабан 19. Этот барабан может вращаться вокруг оси 20, которая параллельна оптической оси 8. На наружной боковой поверхности кулачковый барабан 19 имеет два образующих рабочие поверхности пазового кулачка направляющих паза 21, 22, в которые входят направляющие штифты 23, 24.
Компоненты 1, 3 вставлены своими оправами 4, 6 в каретку 25, которая установлена на двух неподвижных относительно корпуса прямолинейных направляющих 26, 27 с возможностью скольжения по ним. В этом случае, как и в рассмотренном выше варианте выполнения изобретения, компоненты 1, 3 неподвижны друг относительно друга, вследствие чего расстояние между ними является постоянным, и зафиксированы от проворачивания вокруг оптической оси 8.
Компонент 2 вставлен своей оправой 5 в каретку 28, которая также установлена на прямолинейных направляющих 26, 27 с возможностью скольжения по ним и зафиксирована от проворачивания вокруг оптической оси 8.
В этом случае вращение кулачкового барабана 19 в направлении R преобразуется в прямолинейное перемещение входящего в направляющий паз 21 направляющего штифта 23, что сопровождается изменением расстояния D1факт, которое может варьироваться от 0 до D1макс., тогда как аналогичное прямолинейное перемещение входящего в направляющий паз 22 направляющего штифта 24 сопровождается изменением расстояния D2факт.
Как показано на фиг.3, направляющие пазы 21, 22 имеют различный наклон относительно направления вращения. Профили рабочих поверхностей пазовых кулачков можно взаимно согласовывать таким образом, чтобы компоненты 1, 3, с одной стороны, и компонент 2, с другой стороны, перемещались с различной скоростью в одном и том же направлении или же по меньшей мере на отдельных участках в противоположных направлениях. При этом расстояния D1фaкт. и D2факт. перемещения всегда задаются наклоном соответствующих рабочих поверхностей пазовых кулачков относительно направления вращения.

Вариообъектив с конечным расстоянием от предметной плоскости до плоскости изображения по каждому из двух вариантов выполнения содержит три подвижных в осевом направлении компонента, первый и третий из которых положительные, а второй - отрицательный. Первый и третий компоненты выполнены с возможностью их совместного перемещения при сохранении неизменным расстояния между ними, причем расстояние L1+D1факт., измеренное от первого компонента до предметной плоскости, изменяется на величину D1факт. в пределах от 0 до D1макс.. При этом для первого варианта изменение расстояния D2факт. между вторым компонентом и предметной плоскостью зависит от установки на резкость при неизменном расстоянии между вторым и третьим компонентами, а для второго варианта расстояния D2факт. между вторым компонентом и предметной плоскостью принудительно изменяется нелинейно. Обеспечивается упрощение конструкции при одновременном уменьшении флуктуации фокуса, в том числе и при больших расстояниях от предметной плоскости до плоскости изображения и при больших интервалах увеличения. 2 с. и 16 з.п. ф-лы, 3 ил., 1 табл.
Текст формулы в факсимильном виде (см. графическую часть)
| US 4348082 А, 07.09.1982 | |||
| US 3549242 А, 22.12.1970 | |||
| US 4240700 А, 23.12.1980 | |||
| US 4699475 А, 13.10.1987 | |||
| US 3330615 А, 11.07.1967 | |||
| Объектив с плавным изменением фокусного расстояния | 1978 |
|
SU720395A1 |
