Изобретение относится к воздухоплаванию, а именно к летательным аппаратам (ЛА) тарельчатой конфигурации, для полета в воздушно-космическом пространстве.
Известны летательные аппараты "Буран", реактивные многоступенчатые носители, корабли спутники "Восток", "Союз" /Энциклопедия авиация", "Большая Российская Энциклопедия", -М., ЦАГИ, 1994 г., стр. 121/ на реактивной тяге.
Недостатком их, прежде всего, является разовость использования, сравнительно небольшая скорость в атмосфере и маневренность, относительная сложность в изготовлении и эксплуатации.
Известна также запатентованная "летающая тарелка," Джорджа Наймайра /см. Непомнящих Н. и др. "Сто великих тайн", -М., Вече, 2002 г., 394/, которая представляет собой диск диаметром 60 м, в центре его толщина 15 м, а на периферии сходит на нет, образуя острую кромку, сверху поверхность диска покрыта солнечными батареями. Для создания дополнительной подъемной силы верхняя часть диска заполнена гелием. Под диском на поворотных шарнирах смонтированы девять турбореактивных двигателей. При этом сам диск представляет собой аэродинамическую поверхность, и при движении его в атмосфере создается подъемная сила.
Наиболее близким по своей технической сути к предлагаемому изобретению является ЛА по патенту Российской Федерации 2033945, кл. В 64 С 39/10.
Этот ЛА представляет собой летающее крыло малого удлинения с очень толстым /до 37% от длины хорды/ профилем. Внутри этого крыла размещены агрегаты, оборудование и полезная нагрузка. Шасси на воздушной подушке. Аэродинамическое качество крыла значительно повышается за счет системы отсоса пограничного слоя. Силовая установка состоит из двух турбореактивных двигателей с плоскими соплами.
Однако и этот летательный аппарат имеет относительно малую маневренность в атмосфере и не может летать в естественной пустоте, космосе.
Задача предлагаемого изобретения заключается в разработке летательного аппарата, позволяющего осуществлять движение в атмосфере /взлет, полет, маневрирование и посадку/ с высоким аэродинамическим качеством, надежные стабилизацию и управление движением во всех режимах полета, включая и полет в космосе.
Для этого ЛА выполнен в виде двух сферических поверхностей верхней и нижней образующих диск-тарелку, одна из которых, нижняя, имеет меньшую кривизну, чем верхняя и закреплена неподвижно на каркасе - дисковой раме, а другая закреплена на вертикальном валу с возможностью вращения и через основной редуктор соединена с маховиком обратного вращения. На этом же валу установлен основной стартер-генератор. На дисковой раме размещена силовая установка из реактивных двигателей /РД/ вертикального и горизонтального движения. РД вертикального движения установлены на дисковой раме симметрично по кругу соплами вниз, а РД горизонтального движения установлены симметрично по периферии дисковой рамы соплами горизонтально. РД горизонтального движения снабжены аэродинамическим противопомпажным поясом. Топливные насосы всех РД приводятся в движение либо основным стартер-генератором через главный редуктор, либо пусковыми стартерами-генераторами, которыми снабжен каждый РД. Для управления пограничным слоем на верхней вращающейся поверхности установлена крыльчатка воздушного насоса, а воздуховоды снабжены управляемыми заслонками. Агрегаты и оборудование, аккумуляторы, топливные и другие запасы, грузовые отсеки расположены в полости нижней сферической поверхности, а в верхней размещены кабина пилотов и пассажирский салон. Взлетно-посадочное устройство может быть любым от выдвигаемых опор до воздушной подушки.
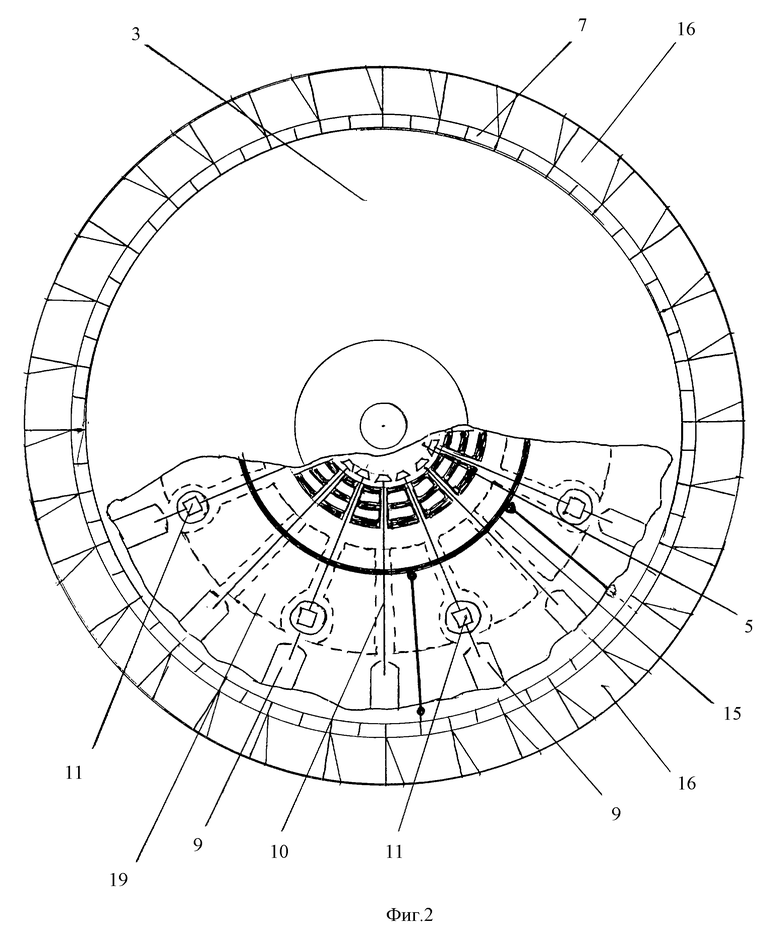
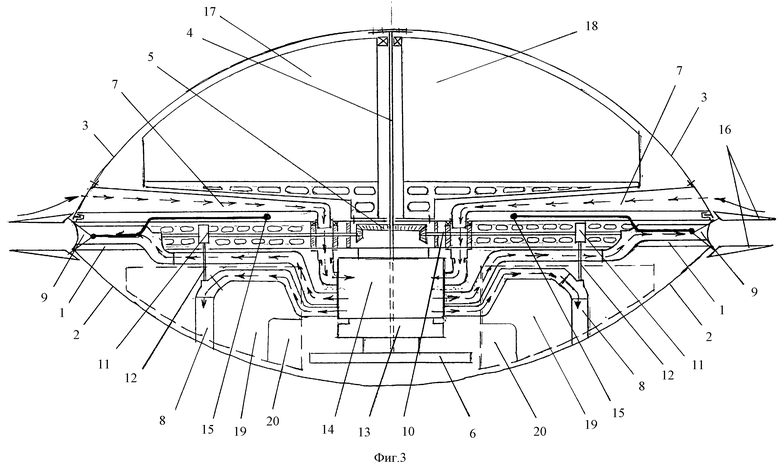
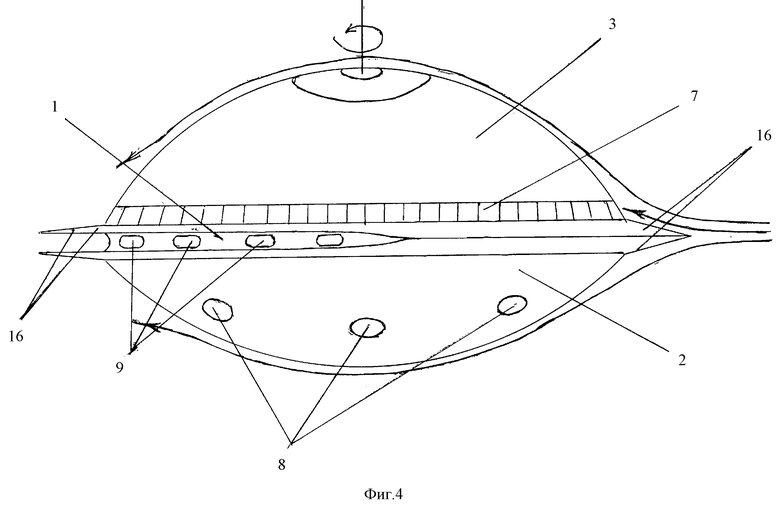
На фиг.1 схематично изображен ЛА; на фиг.2 - то же, вид сверху; на фиг.3 схематично указана компоновка узлов и агрегатов на ЛА; на фиг.4 - ЛА в горизонтальном полете.
Фюзеляж ЛА выполнен в виде дисковой рамы 1, на которой неподвижно закреплена нижняя сферическая поверхность 2 с кривизной меньшей чем у верхней сферической поверхности 3, которая закреплена на вертикальном валу 4 с возможностью вращения и через основной редуктор 5 соединена с маховиком обратного вращения 6, при этом поверхности 2 и 3 образуют аэродинамическую поверхность диска. В рабочем режиме поверхность 3 и маховик 6 получают вращение от основного редуктора 5. На вращающейся поверхности 3 закреплена крыльчатка 7 воздушного насоса системы управления пограничным слоем.
Силовая установка состоит из реактивных двигателей /РД/-8 вертикального движения и РД горизонтального движения 9.
РД 9 размещены на дисковой раме 1 симметрично по периферии соплами горизонтально, их топливные насосы приводятся в движение от главного редуктора 5 через горизонтальные валы 10, а топливные насосы РД 8 получают движение через промежуточные редукторы 11 и промежуточные валы 12. Каждый из РД снабжен пусковым стартер-генератором /на чертежах не показаны/ и могут запускаться как с помощью них, так и с помощью основного стартер-генератора 13 от бортовых источников питания или от аэродромного.
РД 8 размещены на дисковой раме 1 симметрично по кругу соплами вниз. Все РД получают топливо по топливопроводам через основной топливовоздухораспределитель 14, с помощью которого пилот управляет режимами работы РД. РД-9 горизонтального движения снабжены аэродинамическим противопомпажным поясом /АППП/, представляющим собой плавающее на дисковой раме 1 инерционное кольцо 15, шарнирно связанное тягами с каждой парой шарнирно установленных противопомпажных лепестков 16, так что в нейтральном положении, когда кольцо 15 находится в центре, то лепестки 16 образуют по периферии два кольцевых пояса с одинаковым зазором по всей окружности. При ускорении инерционное кольцо 15 смещается в сторону, противоположную направлению полета, и лепестки 16 в направлении движения смыкаются, а в противоположном - размыкаются.
Вращающаяся поверхность 3 и маховик обратного вращения 6 обеспечивают остойчивость летательному аппарату, а вращение поверхности 3 и крыльчатка 7 воздушного насоса обеспечивают управление пограничным слоем. Кабина пилотов 17 с органами управления и пассажирский салон 18 размещены в полости верхней поверхности 3, а топливные баки 19, аккумуляторы 20, грузовые отсеки, посадочное устройство и другое оборудование размещено на дисковой раме 1 в основном в полости поверхности 2.
Работает ЛА следующим образом. Пилот с помощью стартеров-генераторов осуществляет запуск всех РД, дежурный режим с минимальным расходом топлива, при этом от основного редуктора 5 раскручивается вертикальный вал 4, а вместе с ним верхняя сферическая поверхность 3 и маховик обратного вращения, обеспечивая остойчивость ЛА. Инерционное кольцо 15 находится в центральном нейтральном положении и лепестки 16 АППП равномерно раскрыты по всему периметру диска.
Для осуществления взлета пилот равномерно увеличивает тягу РД 8 и поднимает ЛА на необходимую высоту с необходимой скоростью.
Для осуществления полета в выбранном направлении пилот в соответствующем секторе увеличивает тягу РД 9. ЛА получает ускорение в выбранном направлении, инерционное кольцо 15, смещаясь, смыкает лепестки АППП 16 в направлении полета. При достижении соответствующей скорости набегающего потока возникает необходимая подъемная сила и двигатели РД 8 переводятся в дежурный режим работы.
За счет разнотяговости РД 8 пилот изменяет ориентацию ЛА в пространстве. Пограничный слой утончается за счет центробежных сил вращения поверхности 3 и отсоса воздуха с периферии крыльчаткой 7 воздушного насоса.
При необходимости изменить направление полета пилот меняет режим работы РД 9 в соответствующих секторах, изменяя направление вектора тяги ЛА, и с учетом инерции ЛА осуществляет плавный маневр.
Изменить направление движения ЛА пилот может использовать режим зависания. Для этого пилот, изменив направление вектора тяги РД 9 на противоположный, гасит инерцию горизонтального полета и увеличив тягу РД 8, зависает в определенной точке, затем, изменив при необходимости ориентацию ЛА за счет разнотяговости РД 8, начинает движение в нужном направлении как и при взлете.
Для осуществления посадки пилот зависает над выбранным местом посадки, при этом РД 9 находится в дежурном режиме, и, плавно снижая тягу РД 8, пилот осуществляет плавное приземление.
При движении в естественной пустоте, космосе, имеющиеся на ЛА РД 8, 9 поддерживают вращение поверхности 3 и маховика обратного вращения 6, тем самым обеспечивают остойчивость ЛА.
Изменяя режимы работы РД, пилот управляет направлением суммарного вектора тяги и тем самым управляет полетом в космосе.
Количество РД 8 и 9, установленных на ЛА, зависит от класса ЛА, требований надежности, тяговооруженности, скоростных и весовых требований к ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2004 |
|
RU2261823C1 |
| АЭРОДИНАМИЧЕСКИЙ ПРОТИВОПОМПАЖНЫЙ ПОЯС | 2003 |
|
RU2250179C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ЧЕРЁМУШКИНА О.В. | 2008 |
|
RU2396185C1 |
| КОНСТРУКЦИЯ КАБИНЫ РАЗМЕЩЕНИЯ ПАССАЖИРОВ, ЭКИПАЖА, ОБОРУДОВАНИЯ | 2006 |
|
RU2327607C2 |
| РЕДУКТОР | 2002 |
|
RU2250398C2 |
| РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2003 |
|
RU2250387C2 |
| Летательный аппарат | 2022 |
|
RU2808288C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ И РЕГУЛИРОВАНИЯ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2008 |
|
RU2371595C1 |
| УСТРОЙСТВО ДЛЯ ФОРСИРОВАНИЯ РЕАКТИВНОГО ДВИГАТЕЛЯ | 2007 |
|
RU2349785C1 |
| УСТРОЙСТВО ОХЛАЖДЕНИЯ РЕАКТИВНОГО ДВИГАТЕЛЯ | 2007 |
|
RU2363856C2 |
Изобретение относится к авиационно-космической технике, а именно к летательным аппаратам вертикального взлета и посадки. Фюзеляж летательного аппарата выполнен в виде двух сферических поверхностей, имеющих различную кривизну. Верхняя сферическая поверхность с закрепленной на ней крыльчаткой воздушного насоса системы управления пограничным слоем выполнена с возможностью вращения. Кроме того, аппарат снабжен маховиком обратного вращения. Двигательная установка состоит из реактивных двигателей вертикального движения, установленных на нижней поверхности, и горизонтального движения, установленных симметрично по периферии диска. При этом двигатели горизонтального движения снабжены аэродинамическим противопомпажным поясом. Изобретение позволяет повысить стабилизацию и управляемость летательного аппарата на всех режимах полета. 4 ил.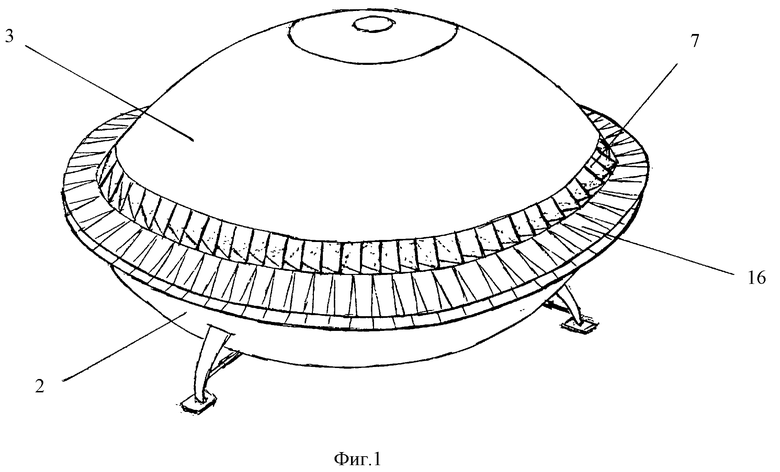
Летательный аппарат, содержащий фюзеляж в виде диска, размещенную в нем силовую установку, газодинамическую систему управления пограничным слоем и системы управления движением и стабилизацией, отличающийся тем, что фюзеляж выполнен из двух сферических поверхностей различной кривизны, одна из которых жестко закреплена на дисковой раме, а другая - вращающаяся, на которой закреплена крыльчатка воздушного насоса системы управления пограничным слоем, установлена на вертикальном валу и через основной редуктор соединена с маховиком обратного вращения, причем с этим же валом соединен общий стартер-генератор, силовая установка состоит из реактивных двигателей горизонтального движения и вертикального движения, которые размещены на дисковой раме симметрично первые по периферии соплами горизонтально, а вторые по кругу на нижней сферической поверхности соплами вниз, причем насосы двигателей горизонтального движения соединены с главным редуктором валами, а насосы двигателей вертикального движения через промежуточные редукторы и валы, при этом каждый из реактивных двигателей снабжен пусковым стартером-генератором, а топливо к ним поступает через основной топливораспределитель, с помощью которого пилот управляет режимом работы силовой установки, кроме того, двигатели горизонтального движения снабжены аэродинамическим противопомпажным поясом, состоящим из свободно плавающего на дисковой раме инерционного кольца, шарнирно связанного тягами с парами лепестков, шарнирно установленных на дисковой раме по ее периферии, так что в нейтральном положении кольца лепестки образуют равномерный кольцевой зазор для сопел двигателей горизонтального движения, газодинамическая система управления пограничным слоем состоит из вращающейся поверхности, установленной на ней крыльчатки воздушного насоса и управляемых заслонок, установленных на воздуховодах.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ, СИСТЕМА УПРАВЛЕНИЯ ОТСОСОМ ПОГРАНИЧНОГО СЛОЯ, СИСТЕМА УПРАВЛЕНИЯ ВДУВОМ В ПОГРАНИЧНЫЙ СЛОЙ, УСТРОЙСТВО ФИКСАЦИИ ПОЛОЖЕНИЯ СХОДА ПОТОКА С ЗАДНЕЙ КРОМКИ ФЮЗЕЛЯЖА И ЕГО ВЗЛЕТНО-ПОСАДОЧНОЕ УСТРОЙСТВО НА ВОЗДУШНОЙ ПОДУШКЕ | 1992 |
|
RU2033945C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ТАРЕЛЬЧАТЫЙ ПЛАНЕТНОГО И МЕЖПЛАНЕТНОГО ПЛАВАНИЯ | 1995 |
|
RU2090454C1 |
| Способ поверки и калибровки измерителей неравномерности группового времени запаздывания | 1980 |
|
SU898360A1 |
| US 6371406 B1, 16.04.2002 | |||
| US 4778128 А, 18.10.1988. | |||

