Область техники
Настоящее изобретение относится к устройству и способу управления мощностью в системе подвижной связи, а более конкретно к устройству и способу управления мощностью прямой линии связи в режиме прерывистой передачи.
Уровень техники
Режим прерывистой передачи (РПП) обычно представляет собой режим, в котором данные передаются в блоке кадров только при наличии данных, предназначенных для передачи в проводной системе или в системе подвижной связи. Применение режима прерывистой передачи имеет следующие преимущества. Так как кадры данных передаются только тогда, когда данные действительно существуют, то можно минимизировать мощность передачи и уменьшить уровень сигнала помехи, влияющего на систему, и тем самым увеличить пропускную способность в целом всей системы.
Однако, так как передатчик обеспечивает прерывистую передачу кадров, приемник не может распознать, передан ли кадр, и это приводит к тому, что базовая станция не может выполнить сама управление мощностью прямой линии связи. В частности, когда приемник оконечного устройства не может точно оценить, передан или нет кадр, приемник оконечного устройства не может полагаться на оценочные параметры декодера, в котором используется контроль при помощи циклического избыточного кода (ЦИК) и так далее, и на результат решения, полученного в результате декодирования этого декодера. Поскольку на результат оценки нельзя полагаться, то существующий способ, который используется в режиме непрерывной передачи, не позволяет точно управлять мощностью передачи базовой станции при работе в режиме прерывистой передачи. Ниже рассматривается пример известного способа управления мощностью прямой линии связи, который используется в приемнике системы подвижной радиосвязи в режиме прерывистой передачи.
На фиг.1 изображена блок-схема известного устройства управления мощностью прямой линии связи приемника и передатчика в системе подвижной связи, работающей в режиме прерывистой передачи. В этом случае предполагается, что система подвижной связи является системой связи с множественным доступом с кодовым разделением каналов (МДКР).
Как показано на фиг.1, радиочастотная (РЧ) секция 10 преобразует РЧ сигнал, принятый через антенну АНТ в сигнал с частотой основной полосы путем преобразования с понижением частоты РЧ сигнала. Приемник 12 сжимает по спектру выходного сигнала РЧ секции 10 и определяет уровень символа путем накопления сжатых по спектру сигналов в блоке символов. В это же время сжатие спектра включает в себя ПШ сжатие по спектру и ортогональное сжатие по спектру. Декодер 14 приемника выполняет проверку, находится ли принятый кадр в хорошем состоянии или в плохом состоянии, путем проверки принятого кадра, таким образом проверяя состояние канала. Секция 16 управления передает результат проверки из декодера 14 обратно в базовую станцию. Когда результат проверки канала, который передается обратно в секцию управления мощностью (на фиг.1 не показана) базовой станции, показывает хорошее состояние, секция управления мощностью оценивает, что канал находится в хорошем состоянии, и уменьшает мощность прямой передачи. С другой стороны, когда результат проверки канала находится в плохом состоянии, оценка секции управления мощностью зависит от того, передала ли базовая станция предыдущий кадр. Если базовая станция передала предыдущий кадр, секция управления мощностью оценивает, что канал находится в плохом состоянии, и увеличивает мощность прямой передачи, в то же время, если базовая станция не передала предыдущий кадр, секция управления мощностью игнорирует результат и, таким образом, не отражает команду при управлении мощностью прямой линии связи.
Соответственно при работе в режиме прерывистой передачи известный способ управления мощностью прямой линии связи имеет недостаток, который заключается в том, что команда управления мощностью прямой линии связи, которая передается обратно, используется только тогда, когда существует переданный кадр данных, при этом скорость, при которой регулируется управление мощностью прямой линии связи, становится очень низкой. Другими словами, когда в режиме прерывистой передачи, при котором количество переданных данных является очень малым, управление мощностью выполняется при очень низкой скорости, которая намного меньше, чем скорость управления мощностью 50 Гц в непрерывном режиме передачи, и таким образом управление мощностью прямой линии связи не позволяет отслеживать скорость изменения канала. В результате требуются устройство и способ более быстрого и точного управления мощностью прямой линии связи при работе в режиме прерывистой передачи.
Сущность изобретения
Задача настоящего изобретения заключается в том, чтобы создать устройство и способ управления мощностью линии связи на основании точной оценки состояния канала с помощью оконечного устройства в системе подвижной связи при работе в режиме прерывистой передачи.
Другая задача настоящего изобретения заключается в том, чтобы создать устройство и способ управления мощностью линии связи с использованием информации о состоянии канала, принимаемой от оконечного устройства в системе подвижной связи при работе в режиме прерывистой передачи.
Для того чтобы решить вышеуказанные и другие задачи, согласно одному аспекту настоящего изобретения, предложено устройство для различения наличия или отсутствия данных о режиме прерывистой передачи при работе в режиме прерывистой передачи. Устройство содержит обнаружитель местоположения для обнаружения местоположения энергии битов управления мощностью и местоположения энергии битов управления немощностью в принятых данных, первое устройство измерения энергии для измерения энергии сигнала, соответствующего местоположению битов управления немощностью, выводимых из обнаружителя местоположения, второе устройство измерения энергии для измерения энергии сигнала, соответствующего местоположению битов управления мощностью, выводимых из обнаружителя местоположения, и секцию управления для различения наличия или отсутствия данных при помощи вычисления отношения выходных сигналов первого устройства измерения энергии и второго устройства измерения энергии.
Устройство различения наличия или отсутствия данных, согласно настоящему изобретению, дополнительно содержит декодер для обнаружения состояния ЦИК в случае, когда переданные данные включают в себя ЦИК, причем секция управления различает наличие или отсутствие данных наряду со значением состояния ЦИК.
Секция управления содержит вычислитель отношения энергий для вычисления отношения значения энергии первого устройства измерения энергии к значению энергии второго устройства измерения энергии, первый компаратор для сравнения выходного сигнала вычислителя отношения энергий с заданным пороговым значением, соответствующим наличию/отсутствию данных, и контроллер для обнаружения наличия или отсутствия данных в соответствии с выходным сигналом первого компаратора.
Устройство различения наличия/отсутствия данных, согласно настоящему изобретению, дополнительно содержит второй компаратор для сравнения значения накопленной энергии битов управления мощностью с минимальным пороговым значением в случае, когда существуют данные, причем секция управления различает наличие или отсутствие данных с использованием вышеуказанных выходных сигналов и выходного сигнала второго компаратора.
Устройство для различения наличия/отсутствия данных, согласно настоящему изобретению, дополнительно содержит передатчик для передачи сигналов, описанный выше, в базовую станцию в системе подвижной связи.
Передатчик содержит блок вставки информации о канале для передачи информации о состоянии обнаруженных данных в виде команды управления мощностью, мультиплексор для мультиплексирования данных, выводимых из блока вставки информации о канале и обратных каналов пилот-сигнала, и передатчик обратной линии связи для преобразования и передачи выходного сигнала мультиплексора в виде сигнала передачи.
Переданная команда управления мощностью может состоять из однобитовой информации, отображающей "достаточное" и "недостаточное" состояние, или может состоять из двухбитовой информации, отображающей "хорошее", "неопределенное", "удовлетворительное" и "плохое" состояние.
В другом аспекте настоящего изобретения предложено устройство для управления мощностью прямой линии связи в соответствии с командой управления мощностью, которая входит в состав принятых данных режима прерывистой передачи при работе в режиме прерывистой передачи. Устройство содержит демодулятор команды управления мощностью для извлечения команды управления мощностью из принятых данных для того, чтобы обеспечить команду управления мощностью, контроллер для объединения демодулированной информации и информации о том, был ли передан предыдущий кадр, и для формирования и вывода битов управления мощностью для понижения мощности только тогда, когда две информации совпадают, и передатчик прямой линии связи для передачи данных и битов управления мощностью под управлением контроллера.
В другом аспекте настоящего изобретения предложен способ формирования команды управления мощностью на основании принятого кадра, который включает в себя множество временных интервалов, каждый из которых включает в себя биты управления мощностью. Способ заключается в том, что получают отношение битов управления мощностью к шуму, которое задается с помощью отношения значения накопленной энергии битов управления мощностью во временных интервалах к значению накопленной энергии шума во временных интервалах, и формируют команду управления мощностью на основании отношения значения накопленной энергии битов символов трафика во временных интервалах к значению накопленной энергии битов управления мощностью в случае, когда полученное отношение битов управления мощностью шума является хорошим.
В способе формирования команды управления мощностью, согласно настоящему изобретению, дополнительно обнаруживают информацию ЦИК, если кадр включает в себя информацию ЦИК, проверяют декодированное состояние обнаруженной информации ЦИК и формируют команду управления мощностью для понижения мощности, если декодирование информации ЦИК было выполнено точно.
В способе формирования команды управления мощностью, согласно настоящему изобретению, дополнительно формируют команду управления мощностью для увеличения мощности, если декодирование обнаруженной информации ЦИК было выполнено неточно.
Краткое описание чертежей
Сущность изобретения иллюстрируется ссылкой на сопроводительные чертежи, на которых:
фиг. 1 изображает блок-схему, иллюстрирующую конструкцию известного устройства для управления мощностью прямой линии связи с использованием декодера в системе подвижной связи с возможностью работы в режиме прерывистой передачи;
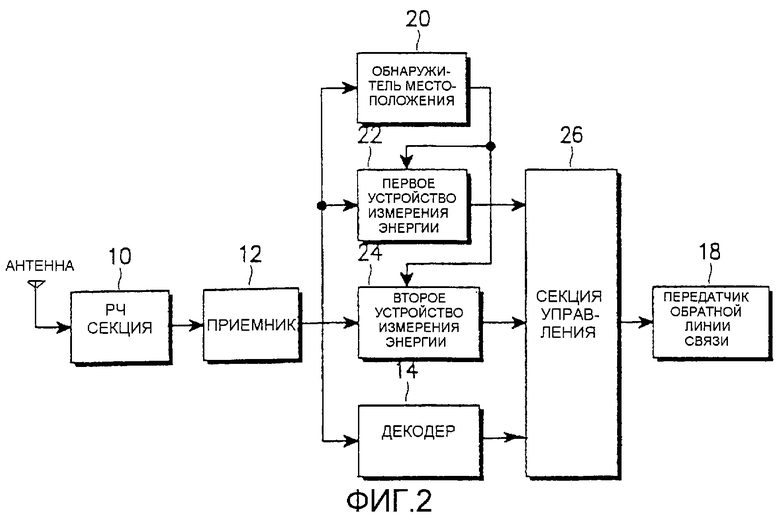
фиг. 2 изображает блок-схему, иллюстрирующую конструкцию устройства для управления мощностью прямой линии связи посредством оценки состояния принятого кадра при работе в режиме прерывистой передачи в системе подвижной связи, согласно варианту осуществления настоящего изобретения;
фиг. 3 изображает блок-схему, иллюстрирующую конструкцию оконечного устройства, которое оценивает состояние кадра с использованием информации, включающей в себя информацию, поступающую из декодера (фиг.2), согласно варианту осуществления настоящего изобретения;
фиг. 4 изображает блок-схему, иллюстрирующую конструкцию оконечного устройства, которое оценивает состояние кадра с использованием информации, включающей в себя информацию, которая поступает из декодера (фиг.2), согласно другому варианту осуществления настоящего изобретения;
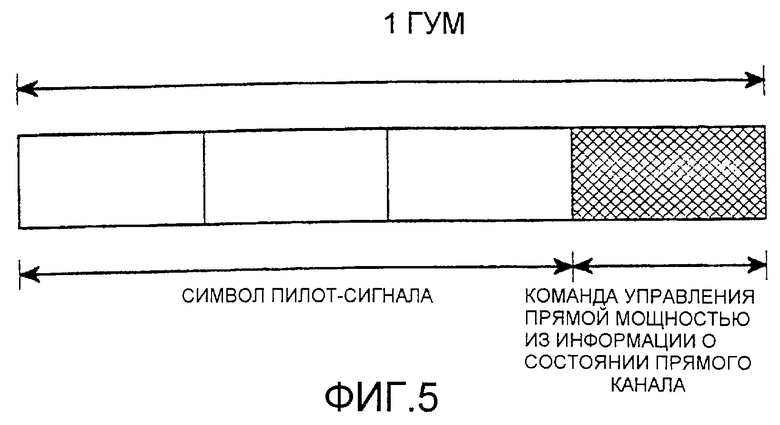
фиг. 5 изображает вид, иллюстрирующий структуру кадра обратного символа пилот-сигнала и подканал управления мощностью для управления мощностью прямой линии связи, согласно варианту осуществления настоящего изобретения (фиг.3);
фиг. 6 изображает вид, иллюстрирующий структуру кадра обратной передачи трафика для управления мощностью прямой линии связи согласно варианту осуществления настоящего изобретения (фиг.4);
фиг. 7 изображает блок-схему, иллюстрирующую устройство управления мощностью прямой линии связи базовой станции для управления мощностью прямой линии связи при обратной передаче, согласно варианту осуществления (фиг.5);
фиг. 8 изображает блок-схему, иллюстрирующую устройство управления мощностью прямой линии связи базовой станции для управления мощностью прямой линии связи при обратной передаче, согласно варианту осуществления (фиг.6);
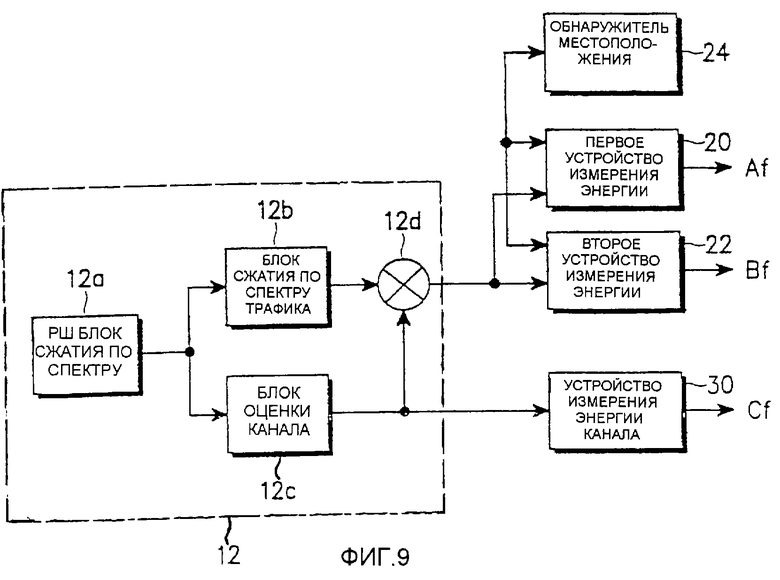
фиг. 9 изображает блок-схему, иллюстрирующую детальную конструкцию устройства для оценки наличия или отсутствия кадра путем измерения энергии битов управления мощностью по отношению к энергии битов управления немощностью;
фиг. 10 изображает блок-схему, иллюстрирующую конструкцию для получения энергии битов управления немощностью и реализации способа, согласно варианту осуществления (фиг.8);
фиг. 11 изображает блок-схему, иллюстрирующую конструкцию для получения энергии битов управления немощностью, в которой уравнение (фиг.10) изменяется;
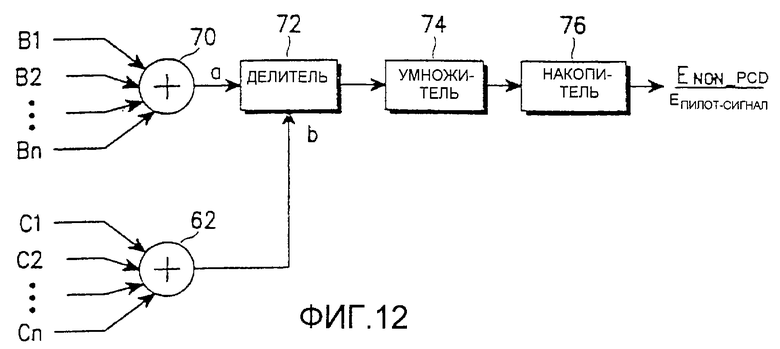
фиг. 12 изображает блок-схему, иллюстрирующую конструкцию для получения энергии битов управления мощностью и реализации способа, согласно варианту осуществления (фиг.8);
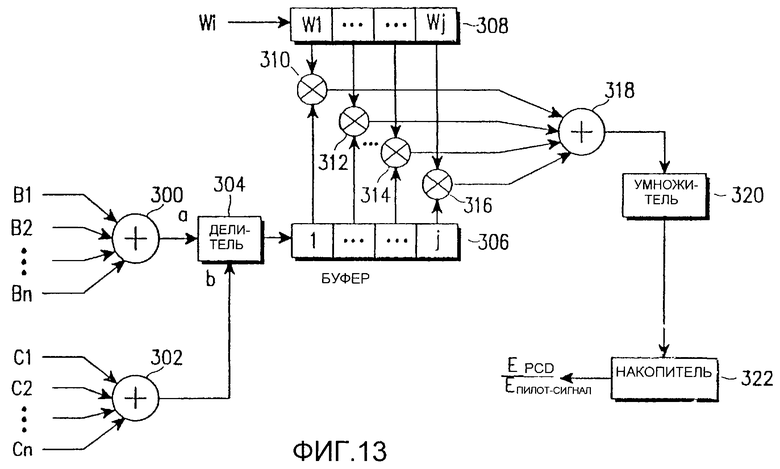
фиг. 13 изображает блок-схему, иллюстрирующую другой вариант осуществления вычислителя отношения энергий (фиг.3 и 4);
фиг. 14 изображает алгоритм, объясняющий работу контроллера, согласно варианту осуществления настоящего изобретения (фиг.3); и
фиг. 15 изображает алгоритм, объясняющий работу контроллера, согласно вариантам осуществления настоящего изобретения (фиг.7 и 8).
Подробное описание предпочтительных вариантов осуществления изобретения
Ссылка на подробное описание предпочтительных вариантов осуществления настоящего изобретения приведена ниже. На чертежах одинаковые элементы обозначены теми же самыми позициями даже в случае, когда они изображены на разных чертежах.
В следующем ниже описании настоящего изобретения показаны многочисленные конкретные элементы, такие как число непрерывных накопленных периодов битов управления мощностью (равномерно переданная часть) и битов управления немощностью (часть, которая может передаваться различным способом для каждого кадра) для определения наличия или отсутствия кадра и так далее, но они представлены только для полного понимания настоящего изобретения, и, таким образом, специалистам в данной области техники будет ясно, что настоящее изобретение можно выполнить и без этих конкретных элементов или их модификаций. Здесь и далее, настоящее изобретение будет объясняться с использованием примера, в котором равномерно переданная часть представляет собой биты управления мощностью прямой линии связи, и часть, которую можно передать различным способом для каждого кадра, представляет собой биты управления немощностью.
В следующем ниже описании термин "прямая линия связи" означает линию связи, по которой передается сигнал от базовой станции в оконечное устройство, а термин "обратная линия связи" означает линию связи, по которой передается сигнал от оконечного устройства в базовую станцию.
На фиг. 2 изображена блок-схема, иллюстрирующая конструкцию устройства связи приемника, согласно варианту осуществления настоящего изобретения.
Как показано на фиг.2, радиочастотная (РЧ) секция 10 преобразует РЧ сигнал, принятый через антенну АНТ в сигнал с частотой основной полосы, путем преобразования с понижением частоты РЧ сигнала. Приемник 12 сжимает спектр выходного сигнала РЧ секции 10 и выводит значение символа посредством накопления сжатых по спектру сигналов в блоке символов. В это же время сжатие по спектру включает в себя ПШ сжатие по спектру и ортогональное сжатие по спектру. Первое устройство 22 измерения энергии измеряет биты управления немощностью, то есть измеряет и выводит энергию битов управления немощностью, которые выводятся из приемника 12. Второе устройство 24 измерения энергии измеряет биты управления мощностью, то есть измеряет и выводит энергию битов управления мощностью, которые выводятся из приемника 12. Обнаружитель 20 местоположения выводит сигнал, который указывает местоположение битов управления немощностью в соответствии с системой МДКР-2000 или с системой Ш-МДКР (широкополосной МДКР) в первое устройство 22 измерения энергии, формирует и выводит во второе устройство 24 измерения энергии сигнал, который указывает местоположение битов управления мощностью. Секция 26 управления определяет состояние канала с использованием выходных сигналов первого и второго устройств 22 и 24 измерения энергии и выходного сигнала декодера 14. Если состояние канала определяется вышеуказанным способом, то секция 26 управления передает информацию о состоянии канала в базовую станцию через передатчик 18 обратной линии связи.
Как описано выше, устройство управления мощностью прямой линии связи (фиг. 2) производит оценку состояния канала в соответствии с наличием кадра путем измерения принятого сигнала и управляет мощностью прямой линии связи с использованием состояния канала в режиме прерывистой передачи в системе связи МДКР. В этом случае, принятый сигнал представляет собой сигнал пользовательского канала, который передается при работе в режиме прерывистой передачи, и его кадр состоит из битов управления мощностью и битов управления немощностью. Соответственно, первое устройство 22 измерения энергии измеряет энергию битов управления немощностью, а второе устройство 24 измерения энергии измеряет энергию битов управления мощностью.
Секция 26 управления вычисляет отношение уровня измеренной энергии управления немощностью к измеренной энергии битов управления мощностью. Поэтому секция 26 управления определяет, существует ли принятый кадр, с использованием значения отношения уровней и заданного порогового значения, и оценивает состояние принятого канала. Секция 26 управления оконечного устройства определяет команду управления прямой мощности, которую будут передавать по обратной линии связи в соответствии с результатом оценки состояния канала, и передает определенное значение по обратной линии связи. Соответственно, базовая станция управляет прямой мощностью передачи с использованием команды управления мощностью, которая передается по обратной линии связи. Подвижная станция может передавать результат оценки состояния канала секции 26 управления по обратной линии связи в базовую станцию. Базовая станция использует это значение в качестве значения управления для управления прямой мощностью в зависимости от того, передан или нет предыдущий кадр.
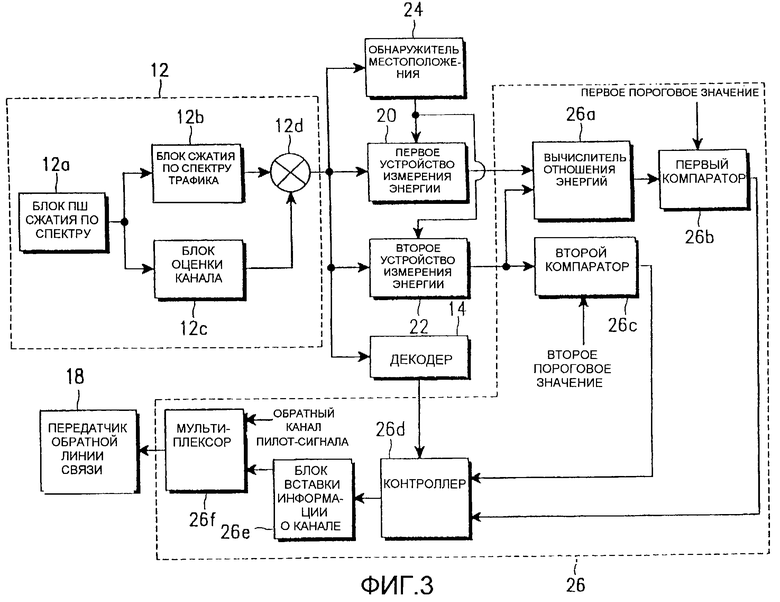
Фиг. 3 изображает блок-схему, иллюстрирующую конструкцию оконечного устройства, согласно варианту осуществления настоящего изобретения. Оконечное устройство производит оценку наличия или отсутствия кадра путем получения информации из декодера и отношения энергии битов управления немощностью к энергии битов управления мощностью и передает обратно информацию о состоянии канала. Конструкция и работа варианта осуществления настоящего изобретения подробно объясняется ниже со ссылкой на фиг.3.
Приемник 12 (фиг.1 и 2) содержит блок 12а ПШ сжатия по спектру, блок 12b сжатия по спектру трафика, блок 12с оценки канала и смеситель 12d. Блок 12а ПШ сжатия по спектру производит сжатие по спектру принятого сигнала прямой линии связи с использованием ПШ-последовательности. Блок 12d сжатия по спектру трафика, который является блоком ортогонального сжатия по спектру, сжимает по спектру ПШ-сжатый сигнал с использованием ортогонального кода соответствующего канала. В этом случае, ортогональный код может быть кодом Уолша, а канал может быть пользовательским каналом трафика. Блок 12с оценки канала принимает сигнал, который ПШ сжимается по спектру с помощью блока 12а сжатия по спектру и выводится из него, и формирует сигнал оценки канала. Смеситель 12d принимает выходной сигнал блока 12b сжатия по спектру трафика и выходной сигнал блока 12с оценки канала, смешивает принятые сигналы и выводит смешанный сигнал.
Первое устройство 20 измерения энергии принимает ортогональный, сжатый по спектру сигнал канала, то есть выходной сигнал смесителя 12d, накапливает энергию битов Non_PCB управления немощностью в течение заданного периода N1 и затем измеряет энергию битов управления немощностью в течение периода накопления. Второе устройство 22 измерения энергии принимает выходной сигнал смесителя 12d, накапливает энергию битов РСВ управления мощностью в течение заданного периода N2 и затем измеряет энергию битов управления мощностью в течение периода накопления.
Вычислитель 26а отношения энергий делит выходной сигнал первого обнаружителя 20 энергии на выходной сигнал второго обнаружителя 22 энергии. Выходной сигнал вычислителя 26а отношения энергий подается в первый компаратор 26b. Первый компаратор 26b сравнивает значение входного сигнала с первым пороговым значением. Значение выходного сигнала первого компаратора 26b будет основой для оценки наличия или отсутствия кадра. Вычислитель 26а отношения энергий, который вычисляет отношение энергии битов управления немощностью к энергии битов управления мощностью, позволяет получить отношение энергий для каждой группы управления мощностью (ГУМ) и накапливает отношение в течение периода кадра. К тому же, вычислитель 26а отношения энергий может накапливать энергию битов управления мощностью и энергию битов управления немощностью соответственно в течение периода кадра и получать это отношение из него один раз в течение каждого кадра.
Первое устройство 20 измерения энергии и второе устройство 22 измерения энергии - можно оба использовать в системе, в которой пользователи используют свои собственные местоположения битов управления мощностью, соответственно, и в системе, в которой пользователи используют общие местоположения битов управления мощностью. В частности, их можно оба использовать в системе МДКР-2000, в которой местоположения битов управления мощностью определяют с использованием кодов соответствующих пользователей, и в системе Ш-МДКР, в которой местоположение битов управления мощностью передачи (УМП) является фиксированным для пользователей. Второй компаратор 26с служит для оценки состояния канала с использованием битов управления мощностью, которые всегда имеются в ситуации, при которой неизвестно наличие или отсутствие данных. Второй компаратор 26с производит сравнение выходного сигнала второго устройства 22 измерения энергии с заданным вторым пороговым значением и выводит результирующий сигнал сравнения.
Контроллер 26d может оценить состояние кадра с использованием значения выходного сигнала первого компаратора 26d, значения выходного сигнала второго компаратора 26с и информации о состоянии декодирования, которая поступает из декодера 14. В информации о состоянии декодирования, которая поступает из декодера 14 и используется контроллером 26d для оценки состояния декодированного кадра, можно использовать любое одно из: метрика, частота появления ошибок кодированного символа, ЦИК или их комбинацию. В этом варианте осуществления настоящего изобретения биты ЦИК находятся в кадре данных, и приемник использует их для оценки надежности кадра. Однако метрику, частоту появления ошибок закодированного символа и так далее можно использовать вместо этого. Настоящее изобретение не ограничивается способами декодера, которые используются в известной области техники. Если в результате проверки ЦИК с помощью декодера 14 подтверждается, что принятый кадр является хорошим кадром, то контроллер 26d оценивает, что кадр присутствует в принятом сигнале, и кадр находится в хорошем состоянии. Если в результате проверки ЦИК с помощью декодера 14 подтверждается, что принятый кадр не является хорошим кадром, то контроллер 26d проверяет результат сравнения второго компаратора 26с, который является значением энергии битов управления мощностью, со вторым пороговым значением. Если значение энергии не превышает второе пороговое значение, то контроллер 26d оценивает, что кадр находится в неопределенном состоянии. Когда оценивается, что кадр находится в неопределенном состоянии, это означает, что энергия битов управления мощностью, которые передаются всегда, находится ниже заданного уровня. То есть, если надежность для определения наличия кадра данных в принятом сигнале находится на низком уровне, то оценивается, что состояние канала принятого сигнала является неопределенным.
С другой стороны, если значение энергии битов управления мощностью превышает второе пороговое значение, то контроллер 26d производит проверку выходного сигнала первого компаратора 26b, который является результатом сравнения отношения энергии битов управления немощностью к энергии битов управления мощностью с первым пороговым значением. Если определено, что значение превышает первое пороговое значение, то контроллер 26d оценивает, что данные существуют в кадре, и состояние канала является плохим. Если определено, что значение не превышает первое пороговое значение, то контроллер 26d оценивает, что кадр не существует в принятом сигнале. К тому же, так как энергия битов управления мощностью превышает заданный уровень для кадра, то контроллер 26d оценивает, что канал находится в удовлетворительном состоянии. Работа контроллера 26d объяснена ниже со ссылкой на алгоритм (фиг. 14). При работе контроллера 26d, которая представлена алгоритмом (фиг. 14), приемник может определить, когда состояние канала является хорошим, даже тогда, когда результат проверки ЦИК не является хорошим, потому что отсутствует кадр данных. Таким образом, приемник различает этот случай по отношению к случаю, при котором кадр данных существует, но состояние канала является плохим. В результате можно точно оценить состояние канала принятого сигнала.
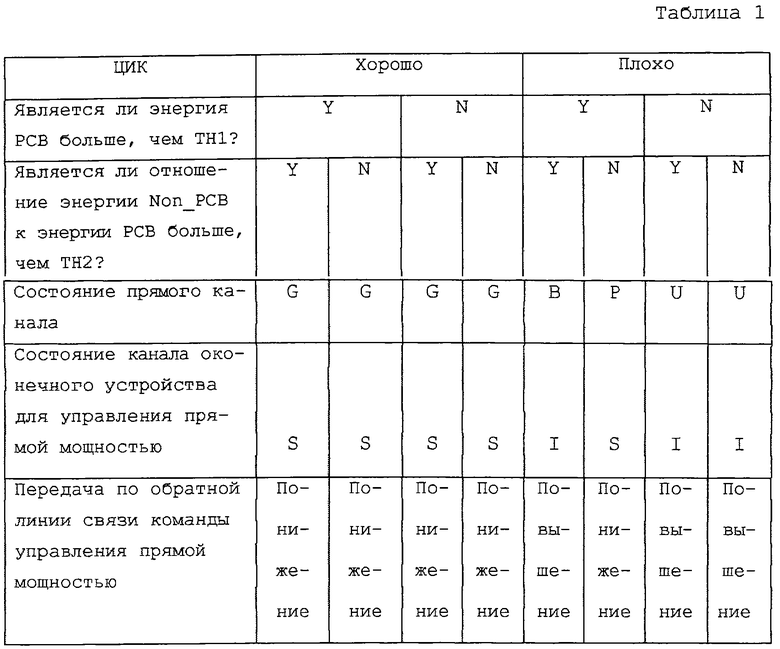
ЦИК, который является выходным сигналом декодера, энергия битов управления мощностью, результат возможной оценки контроллера канала в соответствии с отношением энергии битов управления немощностью к энергии битов управления мощностью и команды управления мощностью прямой линии связи для соответствующих случаев представлены в таблице 1.
В таблице 1 представлены результаты проверки, где "Y" обозначает "да" и "N" обозначает "нет". "G" обозначает хорошее состояние, "В" обозначает плохое состояние, "Р" обозначает удовлетворительное состояние, в котором кадр не существует, и "U" обозначает неопределенное состояние в результате оценки кадра. К тому же, "S" обозначает достаточное качество принятого сигнала независимо от наличия или отсутствия данных, и "I" обозначает недостаточное качество принятого сигнала независимо от наличия или отсутствия данных.
В частности, в случае "G" дается оценка, что данные существуют в кадре и кадр имеет достаточное качество. В случае "В" дается оценка, что данные существуют в кадре, но кадр имеет недостаточное качество. В случае "Р" дается оценка, что состояние канала является хорошим, но данные не существуют в кадре. В случае "U" дается оценка, что состояние канала является неопределенным. В случае "Р" данные не существуют в кадре, но значение битов управления мощностью превышает заданное значение, полученное в результате измерения размера битов управления мощностью, которые всегда существуют в кадре. Таким образом, оценивается, что состояние канала имеет достаточное качество. В случае, когда состояние канала является неудовлетворительным, энергия битов управления мощностью находится ниже заданного значения, и таким образом оценивается, что состояние канала имеет недостаточное качество. В нижней части таблицы 1 изображены команды управления мощностью прямой линии связи, которые необходимо передавать по обратной линии связи для соответствующих случаев.
В приведенном ниже описании таблица 1 называется таблицей проверки состояния. Оценка состояния кадра, выполненная с помощью контроллера 26d, по отношению ко всем случаям, изображенным в таблице проверки состояния, будет объяснена ниже со ссылкой на алгоритм (фиг.12). В таблице проверки состояния термины "ТН1" и "ТН2" обозначают пороговые значения соответствующих компараторов, но они не обязательно должны быть одинаковыми, как первое и второе пороговые значения, изображенные на фиг.3.
Используя таблицу проверки состояния, контроллер 26d (фиг.3) оценивает состояние канала и подает результат оценки в блок 26е вставки информации о канале. Блок 26е вставки информации о канале повторно производит вставку результата в часть канала пилот-сигнала для длины ПШ кода. Структура вставленного кадра показана на фиг.5. Информация, вставленная в канал, может представлять собой один бит информации, который отражает достаточное состояние приема или недостаточное состояние приема, или два бита информации, которые отражают четыре состояния: хорошее, плохое, неопределенное и удовлетворительное. В частности, когда вставленная информация является однобитовой информацией, производится повторная вставка для согласования с длиной кадра. Когда вставленная информация является двухбитовой информацией, она кодируется и затем вставляется для согласования с длиной кадра. Конструкция и работа приемника базовой станции для соответствующих случаев поясняется ниже со ссылкой на фиг.7.
Результат оценки контроллера 26d и повторения блока 26е вставки информации о канале вводится в мультиплексор 26f в виде одного его входного сигнала. Другой входной сигнал мультиплексора 26f является информацией обратного канала пилот-сигнала. Мультиплексор 26f объединяет два входных сигнала, как показано на фиг.5, и он выводит объединенный сигнал в передатчик 18 обратной линии связи. Таким образом, информация, обнаруженная с помощью оконечного устройства, передается в базовую станцию.
На фиг. 4 изображена блок-схема, иллюстрирующая конструкцию оконечного устройства, согласно другому варианту осуществления настоящего изобретения, который включает в себя конструкцию секции 26 управления (фиг.2). Оконечное устройство определяет наличие или отсутствие кадра путем получения информации из декодера 14 и отношение энергии битов управления немощностью к энергии битов управления мощностью и передает состояние канала по обратной линии связи. Как показано на фиг.4, контроллер 26d оценивает состояние канала тем же самым способом, как и на фиг.3. Когда оцененное состояние канала представлено в виде однобитовой информации, как описано выше, ее можно вставить в первый бит каждого кадра трафика. Когда оцененное состояние канала представлено в виде двухбитовой информации, как описано выше, ее можно вставить в первые два бита каждого кадра трафика. Конструкция и работа приемника базовой станции для двух случаев будет объяснена ниже со ссылкой на фиг.3.
На фиг.5 изображен вид, иллюстрирующий структуру кадра канала пилот-сигнала обратной линии связи и подканал управления мощностью для управления мощностью прямой линии связи, согласно варианту осуществления настоящего изобретения (фиг.3). Эта структура кадра является такой же, как и структура, изображенная в РК (радиоконфигурация) 3, 4, 5 и 6 IS-2000. Как показано на фиг. 5, три четверти каждой группы управления мощностью служат для передачи символа пилот-сигнала обратной линии связи, и оставшаяся 1/4 - для передачи команды управления прямой мощностью. Значение оценки состояния канала, которое поступает из контроллера 26d (фиг.3), передается через прямой подканал управления мощностью для передачи команды управления прямой мощностью. В это же время при передаче значения оценки состояния канала можно передавать однобитовую команду повышения или понижения для управления мощностью передачи прямой линии связи или можно закодировать и передавать два бита, представляющие собой четыре состояния кадра и канала. В частности, в случае передачи однобитовой команды секция управления прямой мощностью базовой станции управляет прямой мощностью с использованием этой информации. В случае передачи двухбитовой информации о канале секция управления прямой мощностью базовой станции декодирует эту информацию и управляет прямой мощностью передачи в соответствии с тем, передан или нет предыдущий кадр. Ниже, со ссылкой на фиг. 1, объясняется конструкция и работа секции управления прямой мощностью базовой станции.
На фиг.6 изображен вид, иллюстрирующий структуру кадра передачи трафика по обратной линии связи для управления прямой мощностью, согласно другому варианту осуществления настоящего изобретения (фиг.4). Как показано на фиг. 4, выходной сигнал контроллера 26d представляет собой информацию, которая показывает четыре возможных состояния кадра и канала. При использовании этой информации передатчик обратной линии связи оконечного устройства может производить вставку бита показания состояния кадра для представления состояния канала в передней части кадра пользовательских данных. В частности, передатчик обратной линии связи оконечного устройства может передавать в базовую станцию однобитовую информацию, которая позиционируется на передней части кадра и которая представляет собой два состояния канала "хорошо" и "плохо". К тому же, состояние канала можно передавать в базовую станцию в виде двухбитовой информации, которая представляет собой четыре состояния канала. При передаче однобитовой информации секция управления прямой мощностью базовой станции декодирует кадр данных, анализирует однобитовую информацию и выполняет управление мощностью с использованием однобитовой информации. При передаче двухбитовой информации секция управления прямой мощностью базовой станции декодирует кадр данных, анализирует двухбитовую информацию и затем выполняет управление прямой мощностью в зависимости от того, передан или нет предыдущий кадр. Ниже, со ссылкой на фиг.7, объясняется конструкция и работа секции управления прямой мощностью.
На фиг.7 изображена блок-схема, иллюстрирующая схему управления для управления мощностью прямой линии связи передатчика прямой линии связи с использованием команды управления прямой мощностью в соответствии с состоянием канала обратной линии связи. Приемник базовой станции демодулирует принятый сигнал обратной линии связи, анализирует биты управления мощностью, которые передаются из оконечного устройства в базовую станцию, и управляет мощностью передачи прямой линии связи. В это же время демодулятор (50 на фиг.7) приемника базовой станции извлекает информацию управления мощностью из команды управления мощностью, которая вставлена в канал пилот-сигнала (фиг.5). Как показано на фиг. 5, переданная информация управления мощностью может быть командой управления мощностью, при которой терминал осуществляет передачу с целью управления мощностью прямой линии связи, или может быть информацией о состоянии прямого канала, которое оценивается с помощью оконечного устройства. Соответственно, ниже будут объяснены два случая, как способ 1 и способ 2.
Согласно способу 1, базовая станция использует команду управления мощностью для повышения или понижения мощности прямой линии связи в соответствии с состоянием канала, проверенного с помощью оконечного устройства. В частности, если оконечное устройство разделяет состояние принятого прямого канала в соответствии со способом (фиг.3 и 5) на "хорошо" и "плохо", базовая станция производит соответственно повышение или понижение мощности передатчика прямой линии связи. Контроллер прямой мощности базовой станции демодулирует эту команду и управляет прямой мощностью.
Напротив, согласно способу 2, базовая станция управляет мощностью прямой линии связи в соответствии с состоянием передачи предыдущего кадра по отношению к четырем состояниям канала, если четыре состояния канала "хорошее", "плохое", "неопределенное" и "удовлетворительное" (фиг.3 и 5) используются для передачи информации о состоянии прямой линии связи в базовую станцию.
Способ 1 представлен в таблице 2, и способ 2 представлен в таблице 3.
В таблице 2 (способ 1) состояния канала "неопределенное" и "удовлетворительное" являются результатами внутренней оценки оконечного устройства, и команды, которые в итоге передаются в обратном направлении, являются командами "понижения" и "повышения".
Причина, почему состояние передачи кадра показано в таблице 2, заключается в том, чтобы показать разность между способом 1 и способом 2. В частности, в таблице 2 и таблице 3 случай, когда кадр принимает значение "Y", и состояние канала является "удовлетворительным", отличается от случая, когда кадр принимает значение "N", и состояние канала является "хорошим". В таблице 2 случай, когда кадр принимает значение "Y", и состояние канала является "удовлетворительным", действительно соответствует случаю, когда ЦИК кадра является "плохим", а состояние канала является "достаточно качественным", и в этом случае оконечное устройство выдает команду "понижение мощности", тогда как в таблице 3 представлен случай, когда оконечное устройство выдает команду "повышение мощности". По этой причине базовая станция знает, что существует кадр, и ЦИК кадра является "плохим", так как она знает, передан или нет кадр.
Аналогично, в таблице 2 представлен случай, когда кадр принимает значение "N", и состояние канала является "хорошим", кадр не был передан, ЦИК является "хорошим", и таким образом мощность понижается. В таблице 3 этот случай можно рассматривать как "плохой", так как базовая станция знает, что кадр не был передан.
В способе 1 оконечное устройство оценивает четыре состояния канала - "хорошее", "плохое", "удовлетворительное" и "неопределенное", и затем оценивает два состояния канала - "S" и "I" для передачи команды "повышение" или "понижение" в базовую станцию. В способе 2, если оконечное устройство оценивает четыре состояния канала - "хорошее", "плохое", "удовлетворительное" и "неопределенное", и передает результат оценки в базовую станцию, то базовая станция дает оценку "повышение" или "понижение" с использованием информации по поводу того, передан ли предыдущий кадр.
Приемник оконечного устройства производит оценку состояния прямого канала с помощью способа, который изображен на фиг.3. В это же время состояние канала делится на "хорошее", "неопределенное", "удовлетворительное" и "плохое". В способе 1 команда управления мощностью, которая передается обратно для управления прямой мощностью, выдает команду на понижение мощности в "хорошем" или в "удовлетворительном" состоянии и выдает команду на повышение мощности в "неопределенном" или в "плохом" состоянии кадра. В способе 2, если оконечное устройство передает информацию о состоянии оцененного канала в базовую станцию, контроллер мощности в базовой станции определяет, повышать или понижать прямую мощность в соответствии с принятой информацией о состоянии канала и состоянии передачи предыдущего кадра. В частности, если предыдущий кадр был передан, то понижение мощности осуществляется только в случае, когда состояние канала является "достаточным", и для оставшихся трех случаев осуществляется повышение мощности. Если предыдущий кадр не был передан, то понижение мощности осуществляется только тогда, когда принимается информация "удовлетворительно", и для оставшихся трех случаев осуществляется повышение мощности.
Согласно различию между способом 1 и способом 2, если при передаче кадра оконечное устройство оценивает состояние "удовлетворительным", то обнаруживается, что часть данных сильно ослаблена, так как энергия битов управления мощностью не может проходить контроль ЦИК, хотя она превышает заданный уровень, а энергия части данных находится ниже заданного уровня. Таким образом, в этом случае оценивается, что состояние канала является "плохим", и принимается решение повысить мощность. Между тем, если оконечное устройство оценивает состояние кадра "хорошим" в случае, когда кадр не передается, обнаруживается, что имеет место ошибка при контроле ЦИК декодера оконечного устройства, таким образом состояние канала определяется "плохим", после чего принимается решение о повышении мощности. В случае, когда оконечное устройство, имеющее структуру, как показано на фиг.3, передает обратно информацию о состоянии канала в соответствии с мощностью прямого канала, как показано на фиг.5, приемник базовой станции использует устройство, выполненное так, как показано на фиг.7, для приема и обработки информации о состоянии канала. В частности, если данные, имеющие формат (фиг.5), передаются через канал пилот-сигнала РЧ, секция 40 базовой станции принимает данные через антенну. Принятые данные преобразуются в сигнал основной полосы частот и затем сжимаются по спектру с помощью блока 42 ПШ сжатия по спектру. После этого переданные данные извлекаются с помощью блока 44 сжатия по спектру пилот-сигнала и смешиваются с сигналом оценки канала, который поступает из блока 46 оценки канала в смеситель 48. Выходной сигнал смесителя 48 демодулируется с помощью демодулятора 50 и затем вводится в контроллер 52. Контроллер 52 формирует сигнал для управления мощностью с использованием одного из этих способов (таблица 2 и таблица 3) и затем выполняет управление мощностью прямой линии связи по отношению к оконечному устройству через передатчик 54 прямой линии связи.
Способ управления прямой мощностью, предложенный в виде способа 1 и способа 2, согласно настоящему изобретению, выполняет управление мощностью для каждого кадра по сравнению с известным способом, который выполняет управление мощностью только при передаче кадра с использованием контроля ЦИК декодера, и таким образом, в предпочтительных вариантах осуществления изобретения, можно эффективно произвести изменение состояния канала.
На фиг.8 изображена блок-схема, иллюстрирующая устройство управления мощностью прямой линии связи базовой станции для управления прямой мощностью передачи с использованием команды управления прямой мощностью в соответствии с состоянием канала (фиг.2). Контроллер управляет мощностью, которая передается вперед по отношению к структуре кадра управления обратной мощностью (фиг.6).
Способ, согласно фиг.8, является способом передачи
информации о прямом канале по каналу трафика обратной линии связи, как показано на фиг.4 и 6. Информация о состоянии канала может быть однобитовой информацией для оценки "хорошего" и "плохого" состояний канала или двухбитовой информацией для оценки четырех возможных состояний канала. В обоих случаях информационные биты канала вставляются в определенную часть каждого кадра (в варианте осуществления (фиг.6) информационные биты канала вставляются в местоположение первого одного или двух битов каждого кадра, и местоположение информационных битов канала можно зафиксировать или различным способом выдать соответствующим пользователям) и передаются по обратной линии связи.
Как показано на фиг.8, способ 1 соответствует случаю, когда оконечное устройство управляет прямой мощностью путем оценки состояния прямого канала, как "хорошее" или "плохое", и способ 2 соответствует случаю, когда оконечное устройство передает по обратной линии связи информацию о состоянии канала, как "хорошее", "неопределенное", "удовлетворительное" или "плохое", и контроллер прямой мощности базовой станции управляет мощностью с использованием переданной информации о состоянии канала. Приемник базовой станции анализирует информацию о состоянии прямого канала путем демодуляции канала трафика обратной линии связи. Согласно способу 1, если информация о состоянии является хорошей, то прямая мощность повышается, тогда как если информация о состоянии является плохой, то прямая мощность понижается. Согласно способу 2, прямой мощностью управляют с использованием информации о состоянии наряду с информацией, показывающей, передан ли предыдущий кадр. К тому же способ (фиг. 8) отличается от способа (фиг.7) форматом данных, переданных из оконечного устройства. В способе (фиг.8) используются данные, которые поступают из блока 43 сжатия по спектру трафика, а не из блока 44 сжатия по спектру пилот-сигнала.
Здесь и далее объяснение различия между способом 1 и способом 2 и ряд случаев в способе управления будет опущено, так как оно является таким же, как и объяснение таблицы 2 и таблицы 3 со ссылкой на фиг.7. Аналогично способу (фиг. 7) способ, представленный на фиг.8, управляет мощностью передачи прямой линии связи для каждого кадра, и таким образом более быстро и эффективно компенсирует изменение канала по сравнению с известным способом управления мощностью только при передаче кадра.
На фиг.9 изображена блок-схема, иллюстрирующая подробную конструкцию устройства для оценки состояния канала, изображенного на фиг.3 и 4 в устройстве управления прямой мощностью при работе в режиме прерывистой передачи (фиг. 2). Конструкция и работа приемника 12 (фиг.9) является такой же, как и на фиг. 2 и 3, и поэтому их объяснение будет опущено. Сигнал, который выводится из смесителя 12d приемника 12, вводится во второе устройство 22 измерения энергии для измерения энергии битов управления мощностью и в первое устройство 20 измерения энергии для измерения энергии битов управления немощностью. Значение выходного сигнала первого устройства 20 измерения энергии, значение выходного сигнала второго устройства 22 измерения энергии, сравнение значения их отношения и пороговое значение заданы с помощью следующих уравнений 1, 2 и 3.
[Уравнение 1]
Энергия символа Non_PCB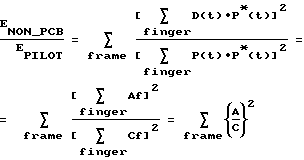
[Уравнение 2]
Энергия СВ:

[Уравнение 3]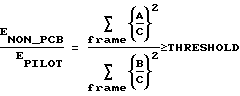
("PILOT - ПИЛОТ-СИГНАЛ, finger - указатель, frame - кадр, THRESHOLD - ПОРОГ")
Значения в приведенных выше уравнениях определяют следующим образом:


D(t): Traffic_symbol
D(t): PCB_symbol
D(t): Pilot_symbol
("frame - кадр, traffic - трафик, symbol - символ, pilot - пилот-сигнал").
В уравнении 1, если числитель, который является составляющей сигнала бита управления немощностью, где состояние канала скомпенсировано, равен "Af", а знаменатель, который характеризует состояние канала, измеренное с помощью устройства 30 измерения энергии канала, равен "Cf", то их реализуют с помощью устройства (фиг.9).
В уравнении 2, если числитель, который является составляющей сигнала управления мощностью, где состояние канала скомпенсировано, равен "Bf", то числитель и знаменатель уравнения 2 реализуют с помощью устройства (фиг.9).
Уравнение 3 представляет собою уравнение для получения отношения энергии бита управления немощностью к энергии бита управления мощностью, полученного с помощью устройства (фиг.9), и для определения существования кадра путем сравнения полученного значения с заданным пороговым значением.
Фиг.10 изображает блок-схему, иллюстрирующую конструкцию для обнаружения энергии бита управления немощностью (уравнение 1). Как показано на фиг.10, работа конструкции, которая реализуется при использовании уравнения 1, будет подробно описана ниже.
Энергия бита управления немощностью и энергия пилот-сигнала, измеренная при соответствующих указателях, складывается с помощью первого и второго сумматоров 60 и 62, и суммарное значение делится с помощью делителя 64. Выходной сигнал делителя 64 имеет вид А/С, как и в уравнении 1. Выходной сигнал делителя 64 умножается с помощью умножителя 66, и умноженное значение накапливается в течение заданного периода с помощью накопителя 68.
Конструкцию (фиг. 10) можно заменить на конструкцию (фиг.11). В частности, два сумматора 80 и 84 идентичны сумматорам 60 и 62 (фиг.10), и накопитель 90 идентичен накопителю 68 (фиг.10). Однако порядок деления и умножения различен. В частности, на фиг.10 деление выполняется первым с помощью делителя 64, а умножение выполняется с помощью умножителя 66. На фиг.11, выходной сигнал первого сумматора 80 умножается с помощью первого умножителя 82, и выходной сигнал второго сумматора 84 умножается с помощью второго умножителя 86. Значения выходных сигналов делят с помощью делителя 88. Таким образом, изменяя уравнение 1, можно реализовать вышеупомянутую конструкцию. Однако конструкция (фиг. 10) проще, чем конструкция (фиг.11). Другими словами, конструкцию можно изменить в соответствии с модификацией уравнения 1, и специалистам будет ясно, что возможны и другие модификации.
Фиг.12 изображает блок-схему, иллюстрирующую конструкцию для обнаружения энергии бита управления мощностью (уравнение 2). Как показано на фиг.12, работа конструкции, реализованной в соответствии с уравнением 2, будет подробно объяснена ниже.
Энергия бита управления мощностью и состояние канала, измеренное при соответствующих указателях, складывают вместе с помощью первого и второго сумматоров 70 и 72, и сложенные значения вводятся в делитель 72. Делитель 72 принимает два сигнала в качестве входных сигналов и делит выходной сигнал первого сумматора 70 на выходной сигнал второго сумматора 62. Выходной сигнал делителя 72 вводится в умножитель 74 и умножается с помощью него. Выходной сигнал умножителя 74 накапливается до заданного значения с помощью накопителя 76.
Значение энергии бита управления мощностью, вычисленное с помощью конструкции (фиг. 11), и значение энергии бита управления немощностью, вычисленное с помощью конструкции (фиг.10), обрабатывают с помощью уравнения 3 для того, чтобы получить значение для оценки существования кадра.
Фиг. 13 изображает блок-схему, иллюстрирующую другой вариант осуществления вычислителя 26а отношения энергий (фиг.3 и 4). Конструкция (фиг.13) задается с помощью следующего уравнения 4, и путем подстановки его в уравнение 3 получают следующее уравнение 5:
[Уравнение 4]
Энергия РСВ:
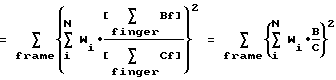
[Уравнение 5]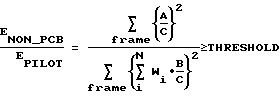
В уравнении 4 и в уравнении 5 "Wi" обозначает команду управления прямой мощностью, переданной в i-й группе управления мощностью, то есть команду, переданную по обратной линии связи для управления прямой мощностью с помощью базовой станции после измерения состояния прямого канала оконечным устройством. При сохранении этого значения в буфере сохраняется информация о состоянии канала. Если выносится оценка, что состояние прямого канала является хорошим, то команда управления прямым каналом, которая передается по обратной линии связи, уменьшает прямую мощность, и таким образом это значение записывается как "1". Другими словами, значение, сохраненное в буфере 308, равно "1". С другой стороны, если выносится оценка, что состояние прямого канала не является хорошим, то команда управления прямым каналом, которая передается по обратной линии связи, взвешивает прямую мощность, и это значение записывается как "0" в буфере 308. Соответственно, так как значение энергии бита управления мощностью группы управления мощностью, записанное как "1", представляет собой состояние, когда состояние канала является хорошим, то его будут компенсировать при вычислении текущего значения энергии бита управления мощностью. К тому же, так как значение энергии бита управления мощностью группы управления мощностью, записанное как "0", представляет собой состояние, когда состояние канала является плохим, то его не будут компенсировать при вычислении текущего значения энергии бита управления мощностью. Если "Wi" равно 1, то состояние канала является хорошим, и выдается команда на уменьшение мощности, и таким образом в уравнении отражается -0,5 дБ. Если "Wi" равно 0, то состояние канала является плохим, и выдается команда на увеличение мощности, и таким образом в уравнении отражается +0,5 дБ.
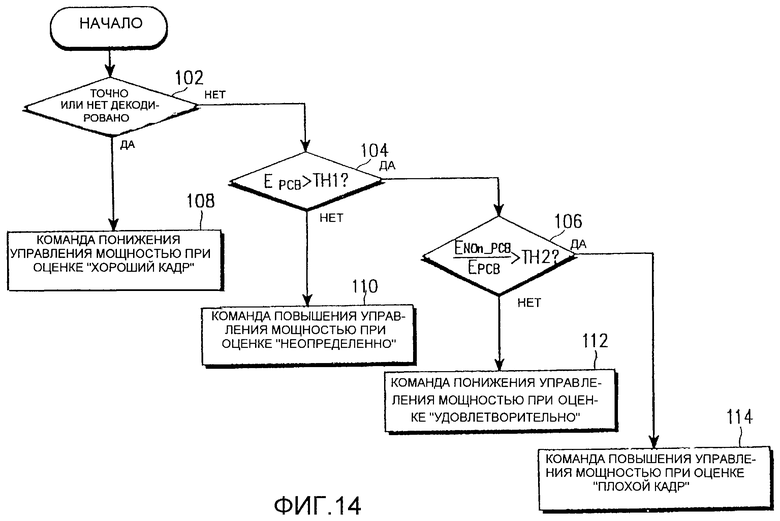
Фиг. 14 изображает алгоритм, поясняющий работу контроллера в вариантах осуществления настоящего изобретения, показанных на фиг.3 и 4. Контроллер 26d проверяет, является ли текущий принятый кадр хорошим кадром или плохим кадром, с использованием информации о декодировании, такой как контроль ЦИК декодера 14 на этапе 102. То есть контроллер проверяет, точно или нет выполнено декодирование, то есть контроль ЦИК показывает, имеется ошибка или нет.
Если проверка показала, в виде результата проверки ЦИК на этапе 102, что принятый кадр является хорошим, то контроллер 26d переходит на этап 108. В этом случае, выносится оценка о том, что кадр существует, и состояние кадра является хорошим. Однако, если проверка показывает, что принятый кадр не является хорошим, в результате проверки ЦИК на этапе 102, то контроллер 26d переходит на этап 104. На этапе 104 контроллер 26d проверяет, является ли значение энергии бита управления мощностью больше заданного порогового значения с использованием энергии битов управления мощностью. Энергия битов управления мощностью включает в себя значение отношения энергии битов управления мощностью к шуму. В частности, энергия битов управления мощностью также соответствует отношению уровней сигналов, то есть сигнала к сигналу помехи, которое выражает действительное состояние канала, а также просто означает энергию битов управления мощностью. Если значение энергии битов управления мощностью не больше, чем заданное пороговое значение, полученное в результате проверки, то контроллер 26d переходит на этап 110. С другой стороны, если значение энергии битов управления мощностью больше порогового значения, то контроллер 26d переходит на этап 106. В случае перехода на этап 110 контроллер 26d рассматривает, что текущий принятый сигнал находится под воздействием худших условий канала, и выносит оценку состояния как "неопределенное".
Между тем в случае перехода с этапа 104 на этап 106 контроллер 26d производит оценку наличия/отсутствия кадра данных. В частности, контроллер 26d сравнивает значение отношения энергии битов управления немощностью к энергии битов управления мощностью с заданным пороговым значением, и если значение отношения не превосходит порогового значения, то он переходит на этап 112. На этапе 112 контроллер оценивает, что принятый сигнал находится в "удовлетворительном" состоянии, которое показывает, что условия работы канала являются хорошими, но кадр данных не существует. Однако, если значение отношения превышает пороговое значение, контроллер 26d переходит на этап 114. На этапе 114 контроллер оценивает, что принятый сигнал находится в "плохом" состоянии кадра, так как кадр данных существует, но результат контроля ЦИК не является хорошим.
Как описано выше, согласно вариантам осуществления настоящего изобретения, энергию битов управления мощностью и энергию битов управления немощностью принятого сигнала измеряют в системе подвижной связи, которая может работать в режиме прерывистой передачи, и точное состояние канала обнаруживается даже при наихудших условиях работы канала с использованием вышеуказанных значений и проверки кадра данных декодера, поэтому управление мощностью можно выполнить для каждого кадра даже в случае, когда кадр данных передается в режиме прерывистой передачи. Здесь и далее, процесс управления прямой мощностью, который выполняется в базовой станции с использованием результата, обработанного с помощью оконечного устройства, будет объяснен ниже.
Фиг. 15 изображает алгоритм, иллюстрирующий процесс управления прямой мощностью, который выполняет контроллер в случае, когда оконечное устройство оценивает состояние канала через процесс (фиг.14), и передает соответствующие данные в базовую станцию.
Если контроллер 52 базовой станции принимает информацию о состоянии канала из оконечного устройства на этапе 200, то он переходит на этап 202. На этапе 202 контроллер проверяет, передан ли предыдущий кадр. Если предыдущий кадр был передан в виде результата проверки, контроллер 52 базовой станции переходит на этап 204, если нет, то он переходит на этап 210. На этапе 204 контроллер 52 проверяет, показывает ли информация о состоянии канала, принятая на этапе 200, что прямая линия связи находится в "хорошем" состоянии. Если принятая информация о состоянии канала находится в "хорошем" состоянии, то контроллер 52 переходит на этап 206, если нет, то он переходит на этап 208. Причина, почему контроллер переходит на этап 206 или 208, заключаются в том, что мощностью прямой линии связи управляют с целью ее понижения только тогда, когда состояние канала является "хорошим" и когда был передан предыдущий кадр, как показано в таблице 3. В соответствии с результатом управления мощностью с помощью способа 2, который показан в таблице 3, "понижение мощности" реализуется только тогда, когда состояние канала является "хорошим" и когда передан кадр. Соответственно, на этапе 204 выполняется проверка, является или нет состояние канала "хорошим". В частности, на этапе 206 контроллер 52 базовой станции передает команду для понижения прямой мощности в контроллер 54 прямой передачи. Между тем, на этапе 208 контроллер 52 базовой станции передает команду для повышения прямой мощности в контроллер 54 прямой передачи для повышения мощности базовой станции.
Между тем, если информация о канале принимается в состоянии, когда предыдущий кадр не был принят на этапе 202, то контроллер 52 переходит на этап 210 и выполняет проверку, принята ли информация о состоянии канала в "удовлетворительном" состоянии. Если определяется, что состояние канала является "удовлетворительным", то контроллер 52 базовой станции переходит на этап 212, и если нет, то он переходит на этап 214. Причина, почему контроллер переходит на этап 212 или 214, заключается, в том, что мощностью управляют с целью понижения только тогда, когда состояние канала является "удовлетворительным" в случае, когда предыдущий кадр не был передан, как показано в таблице 3. В соответствии с результатом управления мощностью с помощью способа 2, который показан в таблице 3, "понижение мощности" осуществляется только в случае, когда состояние канала является "удовлетворительным" и когда кадр не передан. Соответственно, на этапе 210 выполняется проверка, является или нет состояние канала "удовлетворительным". На этапе 212 контроллер 52 базовой станции оценивает, что состояние канала является "достаточно качественным", и передает команду для понижения мощности прямой линии связи в контроллер 54 прямой передачи. Напротив, если состояние канала не является "удовлетворительным" в результате проверки на этапе 210, то контроллер 52 переходит на этап 214. На этапе 214 контроллер 52 оценивает, что состояние канала является "недостаточным", и передает команду для увеличения мощности прямой линии связи в контроллер 54 прямой передачи для повышения прямой мощности передачи базовой станции.
К тому же, согласно предпочтительным вариантам осуществления настоящего изобретения, когда оконечное устройство выполняет мягкую передачу обслуживания между базовыми станциями и базовые станции увеличивают энергию битов для УПРАВЛЕНИЯ МОЩНОСТЬЮ ОБРАТНОЙ ЛИНИИ СВЯЗИ, ОКОНЕЧНОЕ УСТРОЙСТВО обнаруживает сообщение о направлении передачи обслуживания (СНП), которое передается от базовой станции в оконечное устройство, так что оконечное устройство может распознать, что отношение энергии битов управления мощностью к шуму увеличивается. В процессе выполнения передачи обслуживания базовая станция может увеличить или нет энергию битов управления мощностью. Когда базовая станция информирует о том, была ли увеличена энергия в оконечном устройстве через СНП, оконечное устройство может изменить пороговое значение в случае, когда энергия битов управления мощностью увеличивается.
Соответственно, увеличивается накопленная энергия битов управления мощностью, и, таким образом, с помощью регулировки порогового значения, которое сравнивается с отношением энергии битов управления немощностью с энергией битов управления мощностью, можно получить правильное управление состоянием канала, получая в результате эффективно выполненное управление мощностью прямой линии связи. К тому же, согласно предпочтительным вариантам осуществления настоящего изобретения, даже в случае, когда выполняется передача кадра и битов управления мощностью в прерывистом режиме, о состоянии передачи кадра можно точно судить с помощью изменения накопленного периода блока оценки канала, накопленного периода битов управления мощностью и битов управления немощностью и размера порогового значения. В частности, если кадр передается в прерывистом режиме, то накопленный период изменяется до 1, 1/2 и 1/4 в соответствии с частотой прерывания, посредством чего уменьшается накопленная энергия битов управления мощностью. Таким образом при правильной регулировке порогового значения можно правильно судить о состоянии канала и таким образом можно добиться эффективного управления прямой мощностью.








Изобретение относится к управлению мощностью в системе подвижной связи, в частности к управлению мощностью прямой линии связи в режиме прерывистой передачи. Технический результат - повышение точности обнаружения местоположения подвижной станции. Способ заключается в том, что формируют и передают команду управления прямой мощностью для выполнения управления прямой мощностью и выполнения управления прямой мощностью в системе подвижной связи. Согласно способу управления прямой мощностью команду управления мощностью формируют на основании принятого кадра, включающего в себя множество временных интервалов, каждый из которых содержит биты управления мощностью. Получают отношение энергии битов управления мощностью к энергии шума, которое задается отношением накопленной энергии битов управления мощностью во временных интервалах принятого кадра к значению накопленной энергии шума во временных интервалах принятого кадра, и команда управления мощностью на основании отношения значения накопленной энергии битов символов трафика во временных интервалах к значению накопленной энергии битов управления мощностью формируется тогда, когда полученное отношение битов управления мощностью к шуму является приемлемым. 9 с. и 21 з.п. ф-лы, 15 ил., 3 табл.
Приоритет по пунктам:
28.06.1999 по пп. 1-6, 11-27;
08.07.1999 по пп. 7-10, 28-30.
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОТРЕБЛЕНИЕМ МОЩНОСТИ РАДИОПРИЕМНИКА И СПОСОБ УПРАВЛЕНИЯ РАДИОПРИЕМНИКОМ В СИСТЕМЕ РАДИОСВЯЗИ | 1994 |
|
RU2110889C1 |
| JP 10173593 А, 26.06.1998 | |||
| JP 8032515 А, 02.02.1996 | |||
| US 5485486 А, 16.01.1996 | |||
| 1972 |
|
SU428099A1 | |
| US 5873028 А, 16.02.1999 | |||
| JP 10051379 А, 20.02.1998 | |||
| US 5884187 А, 16.03.1999 | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |
