Область техники, к которой относится изобретение
Настоящее изобретение относится в основном к системам связи с расширенным спектром и, более конкретно, к способу и устройству для регулировки параметров сигналов в указанных системах при наличии задержки в контуре управления или на траектории при определении состояния сигнала и использовании управляющего элемента для изменения обнаруженного состояния. Кроме того, изобретение относится к использованию мощности передачи в качестве параметра, которым управляют для минимизации помех между одновременно работающими передатчиками и обеспечения максимально возможного качества передачи отдельных сообщений.
Уровень техники
Для передачи информации между большим количеством системных пользователей разработано множество различных систем и методов связи с множественным доступом. Однако методы модуляции с расширенным спектром, к примеру методы множественного доступа с расширенным спектром и кодовым разделением каналов (МДКР), обеспечивают значительные преимущества по сравнению с другими схемами модуляции, особенно при обеспечении услуг большому количеству пользователей системы связи. Использование методов МДКР в системах связи с множественным доступом раскрыто в патенте США 4901307 "Spread Spectrum Multiple Access Communication System Using Satellite Or Terrestrial Repeaters", выданном 13 февраля 1990 г. , и заявке на выдачу патента США, серийный 08/368570 "Method And Apparatus For Using Full Spectrum Transmitted Power In A Spread Spectrum Communication System For Tracking Individual Recipient Phase Time And Energy", права на которые принадлежат обладателю прав на настоящее изобретение и содержание которых включено в настоящее описание посредством ссылки.
В этих патентах раскрыты системы связи, где в большом количестве обычно мобильных либо удаленных системных пользователей или абонентских блоков ("мобильные блоки") используется по меньшей мере один приемопередатчик для связи с другими мобильными блоками, или пользователями других подсоединенных систем, таких как коммутируемая телефонная сеть общего пользования. Сигналы связи передаются либо через спутниковые ретрансляторы и шлюзы, либо непосредственно на наземные базовые станции (которые иногда называют сотовыми узлами или сотами).
При связи с МДКР частотный спектр может использоваться многократно, что позволяет увеличить количество мобильных блоков. Использование МДКР обеспечивает более высокую эффективность использования спектра, чем та, которая может быть достигнута при применении других методов множественного доступа. Однако для того, чтобы максимизировать общую пропускную способность системы связи и поддерживать приемлемые уровни взаимных помех и качества сигнала, управление передаваемой мощностью сигналов в системе должно осуществляться таким образом, чтобы величина мощности поддерживалась на минимальном уровне, необходимом для любой конкретной линии связи. При управлении, обеспечивающем поддержание мощности передаваемого сигнала на минимальном или близком к минимальному уровне, уменьшаются помехи для других мобильных блоков.
В системах связи, использующих спутники, обычно имеет место замирание сигналов связи, называемое замиранием Райса (Rician). Соответственно принимаемый сигнал состоит из прямой компоненты в сочетании с множеством отраженных компонент, имеющих статистику рэлеевского замирания. Соотношение мощностей между прямой компонентой и отраженными компонентами обычно составляет порядка 6-10 дБ в зависимости от характеристик антенны мобильного блока и окружающей среды, в которой работает данный мобильный блок.
В отличие от систем спутниковой связи в наземных системах связи обычно наблюдается замирание сигналов, состоящих, как правило, только из отраженных или рэлеевских компонент без прямой компоненты. Таким образом для сигналов наземной связи характерно более сильное замирание, чем для сигналов спутниковой связи, где доминирующей характеристикой замирания является замирание Райса.
Рэлеевское замирание в системе наземной связи вызывается сигналами связи, отраженными от множества различных объектов физической среды. В результате сигнал на приемник мобильного блока поступает почти одновременно с многих направлений и с различными задержками передачи. В полосах ультравысоких частот (УВЧ), обычно используемых в мобильной радиосвязи, а также сотовыми системами мобильной телефонной связи, могут появиться значительные фазовые сдвиги в сигналах, проходящих по разным траекториям. При неблагоприятном сложении указанных сигналов время от времени могут возникать явления глубокого замирания.
Для обеспечения дуплексного канала, позволяющего одновременно осуществлять разговор в обоих направлениях, к примеру так, как это обеспечивается в обычной проводной телефонной системе, одна полоса частот используется для исходящей или прямой линии (то есть, передача от передатчика шлюза или сотового узла на приемник мобильного блока), а другая полоса частот используется для входящей или обратной линии (то есть, передача от передатчика мобильного блока на приемник шлюза или сотового узла). Такое разделение частотных полос позволяет передатчику и приемнику мобильного блока действовать одновременно без обратной связи либо помех от передатчика на приемник.
Однако использование различных частотных полос создает значительные трудности для управления мощностью. Использование различных частотных полос вызывает многолучевое замирание, что требует независимой обработки для прямой и обратной линий. Потери на траектории прямой линии измерить довольно сложно, и аналогичные потери на траектории предположительно имеются и в обратной линии.
Кроме того, в сотовой системе мобильной телефонной связи через мобильный телефон можно устанавливать связь через множество сотовых узлов, как описано в находящейся на рассмотрении заявке на выдачу патента США, серийный 07/433030, "Method And System For Providing A Soft Handoff In Communications In A CDMA Cellular Telephone System", поданной 7 ноября 1989 г., содержание которой включено в настоящее описание посредством ссылки. При связи со множеством сотовых узлов мобильный блок и сотовые узлы реализуют схему множественного приема, раскрытую в упомянутой заявке и более подробно раскрытую в находящейся на рассмотрении заявке на выдачу патента США, серийный 07/432552, "Diversity Receiver In A CDMA Cellular Telephone System", также поданной 7 ноября 1989 г., содержание которой также включено в настоящее описание посредством ссылки.
Один способ управления мощностью заключается в том, что либо мобильный блок, либо шлюз сначала измеряет уровень мощности принимаемого сигнала. Такое измерение мощности, наряду с информацией об уровнях мощности передачи по нисходящей линии связи ретранслятора для каждого используемого спутника и информации о чувствительности приемника мобильного блока и шлюза, используется для оценки потерь на трассе для каждого канала мобильного блока. Затем приемопередатчик либо базовой станции, либо мобильного блока может определить подходящую мощность, используемую для передач сигнала на мобильный блок, принимая во внимание оценку потерь на трассе, скорость передаваемых данных и чувствительность спутникового приемника. В случае мобильного блока может быть сделан запрос на повышение или снижение мощности в соответствии с указанными измерениями и определениями. В то же самое время шлюз может увеличить или уменьшить мощность в ответ на указанные запросы либо в соответствии со своими собственными измерениями.
Сигналы, передаваемые мобильным блоком на спутник, транслируются спутником на шлюз и затем в общем случае - в систему управления системой связи. Шлюз либо система управления измеряет мощность принимаемого сигнала исходя из передаваемых сигналов. Затем шлюз определяет отклонение уровня принимаемой мощности от минимального уровня, необходимого для поддержания требуемого уровня связи. Предпочтительно, чтобы требуемый минимальный уровень мощности представлял собой уровень мощности, необходимый для поддержания качественной связи при уменьшении системных помех.
Затем шлюз передает на мобильный блок командный сигнал управления мощностью, с тем, чтобы выполнить регулировку или "точную настройку" мощности передачи мобильного блока. Этот командный сигнал используется мобильным блоком для изменения уровня мощности передачи в сторону минимального уровня, необходимого для поддержания требуемого обслуживания связи. Когда параметры канала изменяются, обычно из-за перемещения мобильного блока либо спутника, мобильный блок реагирует на команды управления от шлюза, непрерывно регулируя уровень мощности передачи с тем, чтобы поддерживать необходимый уровень мощности.
При такой конфигурации команды управления от шлюза называются обратной связью для управления мощностью. Сигналы обратной связи для управления мощностью со стороны шлюза обычно значительно запаздывают из-за задержек на распространение в прямом и обратном направлениях через спутники. Задержка распространения в одну сторону при использовании обычной низкой околоземной спутниковой орбиты (НОО) (879 миль = 1414,6 км) составляет порядка 9-26 мс. Таким образом время, необходимое для того, чтобы команда управления мощностью от шлюза достигла мобильного блока, может составить до 26 мс с момента ее посылки. Аналогично, интервал времени с момента изменения передаваемой мощности, выполненного мобильным блоком в ответ на команду управления мощностью, до момента обнаружения этого изменения шлюзом, также может составить до 26 мс. Общая задержка распространения сигнала в прямом и обратном направлениях в этой системе составляет порядка 18-53 мс. Таким образом, задержка между моментом посылки шлюзом команды управления мощностью и моментом, когда реакция на нее (то есть, изменение уровня мощности, вызванное этой командой управления мощностью) будет обнаружена в шлюзе, может составить до 53 мс.
Таким образом, команда управления мощностью испытывает задержку, связанную с распространением сигнала в прямом и обратном направлениях, а также обычные задержки, связанные с обработкой сигналов, прежде чем результаты выполнения этой команды смогут быть обнаружены измерительным блоком. К сожалению, в частности, если указанная задержка распространения велика, то регулировка мощности передачи в ответ на команду управления мощностью, формируемую мобильным блоком, может не появиться и не сможет быть обнаружена шлюзом до следующего раза, когда в шлюзе будет измеряться мощность приема. Это приведет к тому, что для регулировки мощности передачи будет послана еще одна команда управления мощностью без того, чтобы с пользой реализовать предыдущую команду управления мощностью. В действительности, в зависимости от величины задержки распространения и времени итерации контура управления мощностью могут быть необработаны или "находиться в пути" несколько команд управления мощностью, прежде чем мобильный блок среагирует на первую команду управления мощностью и шлюз обнаружит результаты такой реакции. В результате мощность приема будет колебаться относительно заданного значения, что называют "предельным циклом". То есть, мощность передачи то превышает, то не доходит до требуемой величины из-за задержек поступления и реализации команд.
Одним из возможных решений этой проблемы является простое увеличение времени итерации контура управления мощностью, с тем чтобы сблизить задержки распространения и обработки. Однако для предотвращения внезапной потери сигнала под воздействием быстрого замирания и внезапных блокировок сигналов связи необходимо иметь короткие интервалы итерации. В результате этого мощность передачи может внезапно и без всякой необходимости увеличиваться, что приводит к непроизводительным затратам мощности и повышению уровня системных помех.
Таким образом, существует необходимость в способе и устройстве, способных обеспечить быстрое реагирование на изменения требований к мощности сигнала передачи или других параметров сигнала, и компенсирование воздействия задержек распространения и обработки, связанных с соответствующими командами управления. Желательно, чтобы для такого способа и устройства не потребовалось бы существенное усложнение системы, введение дополнительной структуры управления, либо изменения протокола в шлюзах.
Сущность изобретения
Целью настоящего изобретения является создание способа и устройства, используемых для регулировки параметров сигнала, предпочтительно мощности сигнала передачи, в системе связи. Более конкретно, целью настоящего изобретения является создание устройства и способа для регулировки мощности передачи либо других рабочих параметров в системах связи, к примеру, системах, использующих спутники, где возникают значительные задержки распространения сигнала. Настоящее изобретение позволяет уменьшить неблагоприятные последствия задержек распространения, относящихся к командам управления мощностью, которые посылаются шлюзом на мобильный блок, путем отслеживания команд управления мощностью, которые были посланы на мобильный блок и воздействие которых на мощность сигнала передачи еще не обнаружено шлюзом.
В одном варианте настоящего изобретения контур управления мощностью, размещенный в шлюзе, определяет уровень принимаемой мощности сигнала, передаваемого от мобильного блока. Контур управления мощностью сравнивает уровень принимаемой мощности с требуемым уровнем мощности. Если уровень принимаемой мощности меньше требуемого, то посылается команда управления мощностью, указывающая мобильному блоку увеличить его мощность передачи. Если уровень принимаемой мощности выше требуемого, то посылается команда управления мощностью, указывающая мобильному блоку снизить его мощность передачи.
Из-за задержек распространения, возрастающих с увеличением расстояния между шлюзом и мобильным блоком, особенно в системах связи на базе спутников, на пути между шлюзом и мобильным блоком могут находиться несколько команд управления мощностью либо связанных с ними откликов. Первый набор команд управления мощностью включает в себя команды управления мощностью, которые распространяются по прямой линии системы связи и не достигли мобильного блока. Мобильный блок не отреагировал на первый набор команд управления мощностью путем регулировки своей мощности передачи, поскольку команды управления мощностью не были приняты.
Второй набор команд управления мощностью включает в себя команды управления мощностью, результаты воздействия которых (то есть, сигналы с отрегулированными уровнями мощности) распространяются по обратной линии системы связи и не достигли шлюза. Мобильный блок принял эти команды управления мощностью и отреагировал на них, но соответствующие регулировки уровня мощности не достигли шлюза, чтобы быть обнаруженными.
Одним из признаков настоящего изобретения является отслеживание как первого набора команд управления мощностью (то есть, команд, распространяющихся по прямой линии, которые еще не достигли пользователя мобильного блока), так и второго набора команд управления мощностью (то есть, команд, чьи регулировки распространяются по обратной линии, но эти регулировки еще не обнаружены шлюзом) в виде набора "зависших" (необработанных) команд управления мощностью. Необработанные команды управления мощностью используются контуром управления мощностью для определения новых команд управления мощностью. В частности, необработанные команды управления мощностью добавляются к уровню принимаемой мощности до его сравнения с требуемым уровнем мощности. Таким образом, необработанные команды управления мощностью учитываются при последующих определениях новых команд управления мощностью. Это уменьшает колебания (называемые "предельными циклами") мощности передачи относительно требуемого уровня мощности.
Другим признаком настоящего изобретения является то, что для его реализации не требуется усложнение системы, использование дополнительной структуры управления или изменения в протоколе команд управления мощностью известных систем связи. Кроме того, данный способ обеспечивает аналогичные улучшения характеристик систем, в которых используется протокол многобитовых команд управления мощностью. Таким образом, не требуются изменения в протоколе команд управления мощностью. Кроме того, настоящее изобретение может быть включено в качестве составной части в известные контуры управления мощностью при минимальных изменениях.
Перечень фигур чертежей
Признаки, цели и преимущества настоящего изобретения очевидны из нижеследующего подробного описания вместе с чертежами, на которых одинаковые ссылочные позиции определяют соответствующие элементы на всех чертежах и на которых:
Фиг. 1 - типичная беспроводная система связи, в которой используется настоящее изобретение;
Фиг.2 - пример устройства приемопередатчика, используемого мобильным пользователем;
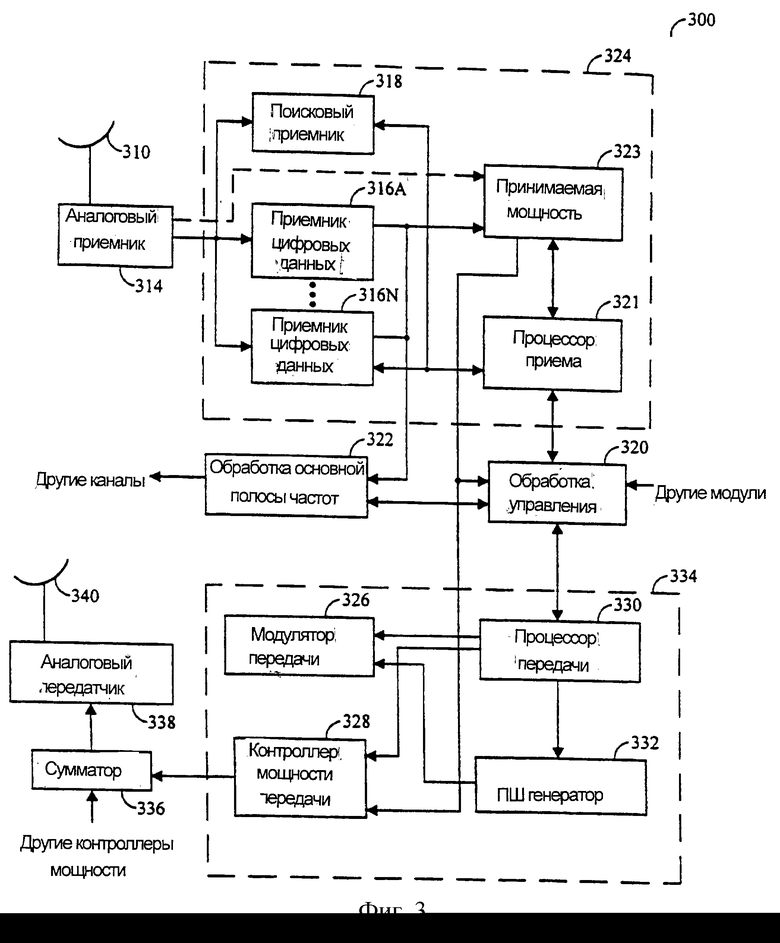
Фиг.3 - пример устройства для передачи и приема, используемого в шлюзе;
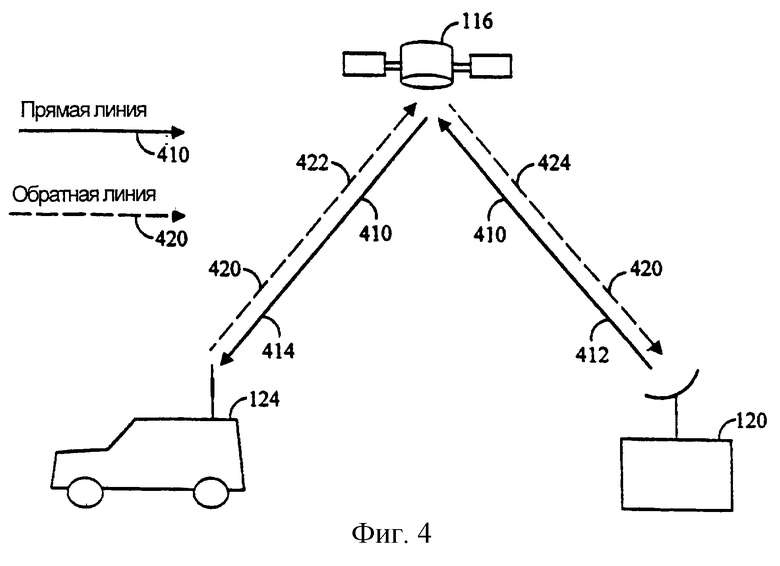
Фиг. 4 - прямая и обратная линии передачи между шлюзом и мобильным пользователем;
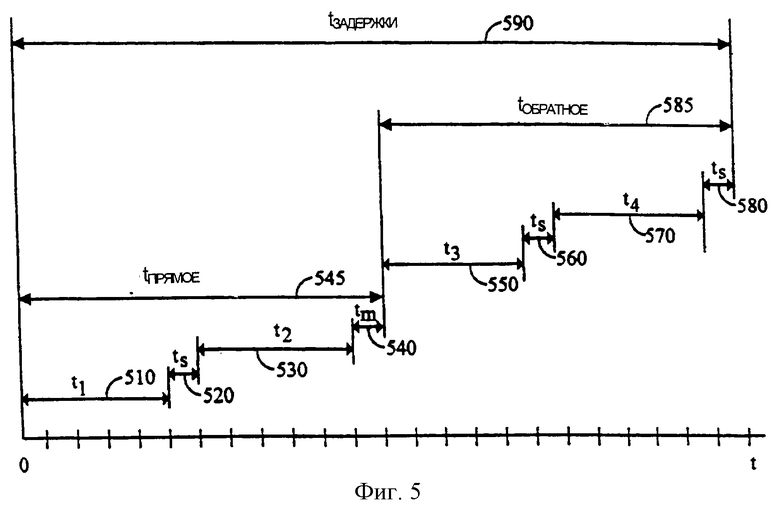
Фиг. 5 - временные характеристики команды управления мощностью по прямой линии и обратной линии системы связи;
Фиг.6 - контур управления мощностью;
Фиг. 7 - стандартный компенсатор, используемый в контурах управления мощностью;
Фиг. 8 - иллюстрация проблемы предельного цикла в стандартном компенсаторе;
Фиг. 9 - компенсатор согласно настоящему изобретению для использования в контурах управления мощностью;
Фиг. 10 - иллюстрация усовершенствованной реакции компенсатора согласно настоящему изобретению, включая уменьшение предельного цикла;
Фиг. 11 - блок-схема, иллюстрирующая функционирование настоящего изобретения;
Фиг.12 - блок-схема, более подробно иллюстрирующая работу компенсатора.
Настоящее изобретение подходит, в частности, для применения в системах связи, где используются спутники на низкой околоземной орбите (НОО).
Однако, что очевидно для специалистов в данной области техники, концепция настоящего изобретения может быть применена к спутниковым системам, которые используются не для целей связи. Данное изобретение применимо также к спутниковым системам, в которых спутники перемещаются по орбитам, не являющимся НОО, либо к ретрансляционным системам, где не используются спутники, если при этом в них имеет место достаточно большая задержка распространения сигналов.
Ниже подробно раскрыт предпочтительный вариант осуществления изобретения. При рассмотрении конкретных этапов способа, конфигураций и компоновок следует иметь в виду, что они приведены только в качестве примеров. Для специалистов в данной области техники очевидным является, что могут быть использованы другие этапы конфигурации и компоновки, не изменяющие сущности и объема настоящего изобретения. Настоящее изобретение может найти применение в самых различных беспроводных информационных системах и системах связи, включая системы, предназначенные для определения местоположения, а также спутниковые и наземные сотовые системы телефонной связи. Данное изобретение предпочтительно применять в беспроводных системах связи с расширенным спектром и МДКР для оказания услуг мобильной или портативной телефонной связи.
Пример беспроводной системы связи, в которой может быть использовано настоящее изобретение, показан на фиг.1. Предполагается, что в этой системе связи используются сигналы связи типа МДКР, но для настоящего изобретения это не является обязательным. В части системы 100 связи, представленной на фиг. 1, показаны одна базовая станция 112, два спутника 116 и 118 и два соответствующих шлюза или концентратора 120 и 122 для обеспечения связи с двумя удаленными мобильными блоками 124 и 126. Обычно базовые станции и спутники/шлюзы представляют собой компоненты отдельных систем связи, которые являются наземными и спутниковыми, хотя это не является обязательным. Общее количество станций, шлюзов и спутников в таких системах зависит от требуемой пропускной способности и других факторов, известных специалистам в данной области техники.
Каждый из мобильных блоков 124 и 126 включает в себя одно из следующих устройств беспроводной связи (но не обязательно только перечисленное): сотовый телефон, приемопередатчик данных или устройство передачи (например, компьютеры, персональные электронные помощники, факсимильные аппараты), или приемник поискового вызова, либо приемник для определения местоположения, и может, если это требуется, представлять собой карманное устройство или устройство, смонтированное на автомобиле. Однако также очевидным является, что изобретение применимо и к стационарным блокам или другим типам оконечных устройств, где требуются услуги дистанционной беспроводной связи, в том числе внутри и вне помещений.
Термины "базовая станция", "шлюз", "концентратор" и "стационарная станция" используются в данной области техники иногда как взаимозаменяющие, причем обычно предполагается, что шлюзы содержат специализированные базовые станции, которые направляют сообщения через спутники. В некоторых системах связи в зависимости от тех или иных предпочтений мобильные блоки называют также абонентскими блоками, терминалами (оконечными блоками) пользователей, мобильными станциями или просто "пользователями", "мобильными объектами" или "абонентами".
В общем случае лучи от спутников 116 и 118 покрывают разные географические зоны в заранее определенных диаграммах направленности. Лучи с различными частотами, называемые также каналами МДКР или "сублучами", могут быть направлены так, что будут перекрывать одну и ту же область. Для специалистов в данной области техники также очевидным является, что зоны уверенного приема, или обслуживания для множества спутников или базовых станций сотовой связи могут быть спроектированы таким образом, чтобы полностью либо частично перекрывать данную область в зависимости от назначения системы связи и типа предлагаемого обслуживания и в зависимости от того, достигается ли пространственное разнесение. Например, в каждой зоне может быть обеспечено обслуживание для различных групп пользователей с различными особенностями на разных частотах, либо данный мобильный блок может использовать множество частот и/или множество поставщиков обслуживания, причем каждый поставщик имеет перекрываемую геофизическую зону обслуживания.
Было предложено множество систем связи с множеством спутников, когда в системе связи используется, например, порядка 48 или более спутников, перемещающихся по восьми различным орбитальным плоскостям на НОО, для обслуживания большого количества мобильных блоков. Однако для специалистов в данной области техники очевидным является, что можно применить концепции настоящего изобретения к самым различным конфигурациям спутниковых систем и шлюзов, в том числе системам с другими параметрами орбит и наборами спутников. В то же время изобретение равным образом применимо к наземным системам с различными конфигурациями базовых станций.
На фиг. 1 показаны некоторые возможные траектории сигналов для связи, устанавливаемой между мобильными блоками 124 и 126 и базовой станцией 112 либо через спутники 116 и 118 со шлюзами 120 и 122. Линии связи "базовая станция - мобильный блок" показаны под ссылочными позициями 130 и 132. Линии связи "спутник - мобильный блок" между спутниками 116 и 118 и мобильными блоками 124 и 126 показаны под ссылочными позициями 140, 142 и 144. Линии связи "шлюз - спутник" между шлюзами 120 и 122 и спутниками 116 и 118 показаны под ссылочными позициями 146, 148, 150 и 152. Шлюзы 120 и 122 и базовая станция 112 могут быть использованы как часть систем односторонней или двухсторонней связи либо просто для передачи сообщений или данных на мобильные блоки 124 и 126.
На фиг. 2 показан пример приемопередатчика 200 для использования в мобильном блоке 106. В приемопередатчике 200 используется по меньшей мере одна антенна 210 для приема сигналов связи, которые передаются на аналоговый приемник 214, где эти сигналы преобразуются с понижением частоты, усиливаются и преобразуются в цифровую форму. Дуплексный элемент 212 используется обычно для того, чтобы одна и та же антенна могла выполнять функции как передачи, так и приема. Однако в некоторых системах используются отдельные антенны для приема и передачи, работающие на разных частотах.
Цифровые сигналы связи с выхода аналогового приемника 214 поступают в по меньшей мере один приемник цифровых данных 216А и по меньшей мере один цифровой поисковый приемник 218. Для получения требуемых уровней разнесения сигналов могут быть использованы дополнительные приемники 216В-216N цифровых данных в зависимости от приемлемого уровня сложности блока, как это очевидно для специалистов в данной области техники.
К приемникам 216В-216N цифровых данных и поисковому приемнику 218 подсоединен по меньшей мере один процессор для управления мобильным блоком 220. Управляющий процессор 220 обеспечивает, среди прочего, основную обработку сигнала, синхронизацию, управление мощностью и переключение каналов связи или координацию, а также выбор частоты, используемой для несущих сигнала. Другой базовой функцией управления, которая часто выполняется управляющим процессором 220, является выбор или манипулирование псевдошумовыми (ПШ) кодовыми последовательностями или ортогональными функциями, используемыми для обработки сигналов связи. Обработка сигнала управляющим процессором 220 может включать в себя определение относительного уровня сигнала и вычисление различных связанных параметров сигнала. Подобные вычисления параметров сигнала, таких как временные характеристики и частота, могут включать использование дополнительных, либо отдельных специализированных схем, обеспечивающих повышенную эффективность или скорость измерений, либо более эффективное распределение ресурсов, используемых для выработки управляющих воздействий.
Выходы приемников 216В-216N цифровых данных подсоединены к цифровой схеме 222 обработки основной полосы частот (digital baseband circuitry) в мобильном блоке. Цифровая схема 222 обработки основной полосы частот пользователя содержит элементы обработки и представления данных, которые используются для передачи информации к или от пользователя мобильного блока. А именно, элементы памяти сигналов или данных, к примеру оперативная или долговременная цифровая память; устройство ввода/вывода, к примеру экраны дисплеев, громкоговорители, клавишные терминалы и телефонные трубки; аналого-цифровые элементы, вокодеры и другие элементы обработки речи и аналоговых сигналов и т.п., все вместе образуют части цифровой схемы 222 обработки основной полосы частот пользователя, где используются элементы, хорошо известные специалистам в данной области техники. Если используется обработка сигнала с разнесением, то цифровая схема 222 обработки основной полосы частот пользователя может содержать сумматор разнесения и декодер. Некоторые из этих элементов могут работать также под управлением управляющего процессора 220 либо быть с ним связанными.
Если в качестве выходного сообщения или сигнала связи, формирующегося мобильным блоком, создаются речевые или другого типа данные, то цифровая схема 222 обработки основной полосы частот пользователя используется для приема, хранения, обработки или какой-либо иной подготовки требуемых для передачи данных. Цифровая схема 222 обработки основной полосы частот пользователя подает эти данные в модулятор 226 передачи, работающий под управлением управляющего процессора 220. Выходной сигнал модулятора 226 передачи передается в контроллер 228 мощности, который подает выходной сигнал управления мощностью на усилитель 230 мощности передачи для окончательной передачи выходного сигнала от антенны 210 на шлюз.
При необходимости в мобильном блоке 200 можно также использовать один или несколько элементов предварительной коррекции (не показаны) в тракте передачи для регулировки частоты исходящих сигналов. Это можно сделать одним либо несколькими различными и хорошо известными методами. В мобильном блоке 200 может быть также использован элемент предварительной коррекции в тракте передачи для регулировки временных характеристик исходящих сигналов с использованием хорошо известных методов добавления или вычитания задержки в сигнале передачи.
В шлюз с использованием различных методов, известных специалистам в данной области техники, можно посылать информацию или данные, соответствующие одному или нескольким измеренным параметрам сигнала для принимаемых сигналов связи, либо одному или нескольким сигналам совместно используемого ресурса. Например, информация может быть передана в виде отдельного информационного сигнала либо добавлена к другим сообщениям, подготовленным цифровой схемой 222 обработки основной полосы частот пользователя. Как вариант, эта информация может быть вставлена модулятором 226 передачи или контроллером 228 мощности передачи под управлением управляющего процессора 220 в виде заранее определенных бит управления. Смотри, например, патенты США 5383219 "Fast Forward Link Power Control In A Code Division Multiple Access System", выданный 17 января 1995 г., 5396516 "Method And System For The Dynamic Modification Of Control Parameters In A Transmitter Power Control System", выданный 7 марта 1995 г., и 5267262 "Transmitter Power Control System", выданный 30 ноября 1993г.
Цифровые приемники 217А-N и поисковый приемник 218 оснащены элементами корреляции сигналов для демодуляции и слежения за конкретными сигналами. Поисковый приемник 218 используется для поиска пилот-сигналов, либо других устойчивых сигналов фиксированной формы, в то время как цифровые приемники 216А-N используются для демодуляции других сигналов, связанных с обнаруженными пилот-сигналами. Следовательно, контроль над выходными сигналами этих блоков поможет определить энергию или частоту пилот-сигнала либо других сигналов. В этих приемниках используются также элементы слежения за частотой, которые можно контролировать, с тем чтобы обеспечивать управляющий процессор 220 информацией о текущей частоте и временных характеристиках демодулируемых сигналов.
На фиг. 3 показан пример устройства 300 приема и передач и для использования в шлюзах 120 и 122. Часть шлюза 120, 122, показанная на фиг.3, имеет один или несколько аналоговых приемников 314, подсоединенных к антенне 310 для приема сигналов связи, которые затем преобразуются с понижением частоты, усиливаются и преобразуются в цифровую форму с использованием различных схем, хорошо известных специалистам в данной области техники. В некоторых системах связи используется множество антенн 310. Оцифрованные сигналы, выходящие из аналогового приемника 314, подаются в качестве входных сигналов, в по меньшей мере, один модуль цифрового приемника, показанный в целом пунктирными линями под ссылочной позицией 324.
Каждый модуль 324 цифрового приемника соответствует элементам для обработки сигналов, используемым для управления связью между шлюзом 120, 122 и одним мобильным блоком 124, 126, хотя специалистам в данной области техники известны и другие варианты. Один аналоговый приемник 314 может обеспечить входные сигналы для нескольких модулей 324 цифрового приемника, а в шлюзах 102, 122 для охвата всех лучей спутников и возможных сигналов в режиме разнесения, обрабатываемых в любой данный момент времени, обычно используется несколько подобных модулей. Каждый модуль 324 цифрового приемника имеет один или несколько приемников 316 цифровых данных и поисковый приемник 318. Поисковый приемник 318 обычно ищет соответствующие режимы разнесения сигналов, отличных от пилот-сигналов. При реализации в системе множество приемников 316А-316N цифровых данных используется для приема сигналов с разнесением.
Выходные сигналы приемников 316 цифровых данных подаются на последующие элементы 322 обработки основной полосы частот, содержащие устройства, хорошо известные специалистам в данной области техники, которые подробно здесь не показаны. Показанное в качестве примера устройство обработки основной полосы частот включает в себя сумматоры разнесения и декодеры для объединения многолучевых сигналов в один выходной сигнал для каждого абонента. Показанное в качестве примера устройство обработки основной полосы частот включает в себя также схемы интерфейса для вывода данных, обычно в цифровой коммутатор или сеть.
На входной стороне часть элементов 322 для обработки основной полосы частот может быть выполнена из множества других известных элементов, таких как (но не только) вокодеры, модемы данных и компоненты для коммутации и запоминания цифровых данных. Эти элементы предназначены для обработки, управления или направления передачи речевых сигналов и сигналов данных на один или несколько модулей 334 передачи.
Каждый из сигналов, подлежащих передаче на мобильные блоки, подводится к одному или нескольким соответствующим модулям 334 передачи. В обычном шлюзе используется несколько таких модулей 334 передачи для одновременного предоставления услуг связи множеству мобильных блоков 124, 126, причем для нескольких спутников и лучей одновременно. Количество модулей 334 передачи, используемых шлюзами 120, 122, зависит от таких известных специалистам факторов, как сложность системы, количество спутников, находящихся в зоне видимости, пропускная способность абонента, выбранная степень разнесения и т.п.
Каждый модуль 334 передачи включает в себя модулятор передачи 326, который модулирует данные для передачи с расширенным спектром. Выход модулятора 326 передачи подсоединен к цифровому контроллеру 328 мощности передачи, который управляет мощностью передачи, используемой для исходящего цифрового сигнала. Цифровой контроллер 328 мощности передачи использует минимальный уровень мощности с целью уменьшения помех и эффективного распределения ресурсов, но, если необходимо компенсировать затухание в тракте передачи и другие характеристики передачи по тракту, то контроллер 328 использует соответствующие (более высокие) уровни мощности. В процессе расширения сигналов модулятор 326 передачи использует, по меньшей мере, один ПШ генератор 332. Для формирования кодов может быть создана также специализированная часть, состоящая из одного или нескольких управляющих процессоров или элементов памяти, используемых в шлюзе 122, 124.
Выходной сигнал контроллера 328 мощности передачи подается в сумматор 336, где он суммируется с выходными сигналами от других схем управления мощностью передачи. Эти выходные сигналы являются сигналами для передачи в другие мобильные блоки 124, 126 на той же самой частоте и в том же самом луче, что и выходной сигнал контроллера 328 мощности передачи. Выходной сигнал сумматора 336 подается в аналоговый передатчик 338 для цифроаналогового преобразования, преобразования с повышением частоты до соответствующей радиочастоты (РЧ) несущей, дополнительного усиления и вывода на одну или несколько антенн 340 для излучения на мобильные блоки 124, 126. Антенны 310 и 340 могут быть одинаковыми в зависимости от сложности и конфигурации системы.
Как и в случае с мобильным блоком 200, в тракте передачи для регулировки выходной частоты на основе известного доплеровского эффекта для линии, через которую установлена связь, могут быть предусмотрены один или несколько элементов предварительной коррекции или прекорректоров. Методы и элементы, используемые для регулировки частоты сигналов перед их передачей, хорошо известны специалистам в данной области техники. Кроме того, тот же либо другой прекорректор можно использовать для регулировки временных характеристик выходного сигнала на основе известной задержки распространения и доплеровского кода для линии, через которую установлена связь. Методы и элементы, используемые для регулировки временных характеристик сигналов перед их передачей, также хорошо известны специалистам в данной области техники.
К модулям 324 приемника, модулям 334 передачи и схеме 322 обработки основной полосы частот подсоединен, по меньшей мере, один управляющий процессор 320 шлюза; эти блоки могут быть физически отделены друг от друга. Управляющий процессор 320 выдает командные и управляющие сигналы для выполнения таких функций, как (но не только их) обработка сигналов, формирование временных характеристик сигналов, управление мощностью, управление переключением каналов связи, суммирование разнесения и системный интерфейс. Кроме того, управляющий процессор 320 распределяет ПШ расширяющие коды, ортогональные кодовые последовательности и конкретные передатчики и приемники для использования их в абонентской связи.
Управляющий процессор 320 также управляет формированием и мощностью пилот-сигналов, сигналов синхронизации и сигналов каналов поискового вызова и их подсоединением к контроллеру 328 мощности передачи. Канал пилот-сигнала - это просто сигнал, который не модулирован данными, и для него может быть использован повторяющийся кадр неизменной формы или неизменной структуры, который подается на вход модулятора 326 передачи, при этом фактически передаются только ПШ расширяющие коды, поступающие от ПШ генератора 332.
Хотя управляющий процессор 320 может быть подсоединен непосредственно к элементам модуля, к примеру модуля 324 передачи или модуля 334 приема, каждый модуль обычно содержит специализированный для данного модуля процессор, такой как процессор 330 передачи или процессор 321 приема, который управляет элементами этого модуля. Таким образом, в предпочтительном варианте осуществления изобретения управляющий процессор 320 подсоединен к процессору 330 передачи и процессору 321 приема, как показано на фиг.3. В этом случае один управляющий процессор 320 может более эффективно управлять операциями с большим количеством модулей и ресурсов. Процессор 330 передачи управляет формированием и мощностью пилот-сигналов, сигналов синхронизации, сигналов поискового вызова и сигналов каналов графика, а также их соответствующими подсоединениями к контроллеру 328 мощности. Процессор 321 приемника управляет поиском, ПШ расширяющими кодами для демодуляции и осуществляет контроль за принимаемой мощностью.
Как было раскрыто выше для терминала пользователя, детектор 323 принимаемой мощности может быть использован для определения мощности сигнала, определяемого аналоговым приемником 314, или путем непрерывного контроля энергии выходных сигналов цифровых приемников 316. Эта информация подается в контроллер 328 мощности передачи для регулировки выходной мощности как части контура управления мощностью, более подробно раскрыто ниже. Эта информация может быть также подана в процессор 321 приема или управляющий процессор 320 в зависимости от необходимости. Эта информация может также быть отнесена к функции процессора 321 приема.
Для некоторых операций, таких как управление мощностью совместно используемых ресурсов, шлюзы 120 и 122 получают информацию, к примеру данные измерений уровня, частоты принимаемого сигнала либо других параметров принимаемых сигналов связи, от мобильных блоков. Эта информация может быть получена из демодулированных выходных сигналов приемников 316 данных процессорами 321 приема. В альтернативном варианте эта информация может быть обнаружена в заранее определенных позициях в сигналах, контролируемых управляющим процессором 320 или процессорами 321 приема, и передана в управляющий процессор 320. Управляющий процессор 320 может использовать эту информацию для управления временными характеристиками и частотой, а также выходной мощностью сигналов, передаваемых и обрабатываемых с использованием контроллеров 328 мощности и аналогового передатчика 338.
При работе системы 100 связи s(t), называемый сигналом прямой линии, передается шлюзом (120, 122) на мобильный блок (124, 126) с использованием частоты несущей А0, генерируемой шлюзом. Сигнал прямой линии испытывает временные задержки, задержку распространения, доплеровские сдвиги частоты и подвергается воздействию других эффектов. Сигнал прямой линии испытывает эти воздействия сначала при передаче из шлюза к спутникам (то есть, по части линии "земля - спутник" (восходящей линии) для сигнала прямой линии), а затем при передаче от спутников к мобильным блокам (то есть, по части линии связи "спутник - земля" (нисходящей линии) для сигнала прямой линии). По принятии сигнала имеет место дополнительная задержка при посылке сигнала обратной линии, задержка распространения и доплеровский эффект при передаче от мобильного блока на спутник (то есть, по части линии связи "земля - спутник" для сигнала обратной линии) и снова от спутника к шлюзу (то есть, по части линии связи "спутник - земля" для сигнала обратной линии).
На фиг. 4 показаны различные сигналы, передаваемые в системе 100 связи, где используется один или несколько спутниковых ретрансляторов 116. Шлюз 120 передает сигнал 410 прямой линии на мобильный блок 124 через спутниковый ретранслятор 116. Сигнал 410 прямой линии состоит из части 412 "земля - спутник" от шлюза 120 к спутниковому ретранслятору 116 и части 414 "спутник - земля" от спутникового ретранслятора 116 к мобильному блоку 124. Мобильный блок 124 передает сигнал 420 обратной линии на шлюз 120 через спутниковый ретранслятор 116. Сигнал 420 обратной линии состоит из части 422 "земля - спутник" от мобильного блока 124 к спутниковому ретранслятору 116 и части 424 "спутник - земля" от спутникового ретранслятора 116 к шлюзу 120.
На фиг. 5 представлен пример временных характеристик команды управления мощностью, передаваемой по прямой линии 410, и реакции (то есть, соответствующего изменения уровня мощности передачи) на команду управления мощностью, передаваемую по обратной линии 420.
Далее со ссылками на фиг.4 и 5 раскрыты временные временные характеристики команды управления мощностью, посылаемой шлюзом 120 на мобильный блок 124. Когда шлюз 120 передает команду управления мощностью в сигнале 410 прямой линии на спутниковый ретранслятор 116, эта команда управления мощностью испытывает задержку 510 распространения (t1) на части 412 линии связи "земля - спутник" из-за наличия некоторого расстояния между шлюзом 120 и спутниковым ретранслятором 116. В спутниковом ретрансляторе 116 команда управления мощностью испытывает задержку 520, связанную с ее обработкой, (ts), когда спутниковый ретранслятор 116 обрабатывает часть 412 сигнала связи "земля - спутник", для того, чтобы передать на мобильный блок 124 часть 414 сигнала линии связи "спутник - земля". То есть, команда управления мощностью испытывает задержку при обработке 520, когда, например, спутник выполняет преобразование частоты или формирование луча. Далее команда управления мощностью испытывает задержку 530 распространения (t2) по части 414 линии связи "спутник - земля" из-за наличия некоторого расстояния между спутниковым ретранслятором 116 и мобильным блоком 124.
В мобильном блоке 124 команда управления мощностью обрабатывается процессором 220 управления и цифровым контроллером 228 мощности передачи. В результате такой обработки мобильный блок 124 регулирует мощность передачи сигнала 420 обратной линии. Во время этой обработки команда управления мощностью испытывает задержку 540, связанную с ее обработкой (tm).
Прежде чем мобильный блок 124 отрегулирует уровень мощности передачи, команда управления мощностью испытывает суммарную задержку 545 в прямой линии связи (tпрямое), которая может быть выражена как:
tforward=t1+ts+t2+tm
Задержка 545 в прямой линии представляет величину задержки между моментом, когда шлюз 120 посылает команду управления мощностью, и моментом, когда выполняется регулировка мощности передачи сигнала 420 обратной линии.
Также в связи с фиг. 4 и 5 обсуждаются временные характеристики реакции на команду управления мощностью, выполняемую мобильным блоком 124 на сигнале 420 обратной линии. После того, как мобильный блок 124 отрегулирует мощность передачи сигнала 420 обратной линии, мобильный блок 124 передает на спутниковый ретранслятор 116 часть 422 сигнала линии связи "земля - спутник". Реакция на команду управления мощностью (то есть, изменение уровня мощности передачи для сигнала обратной линии) испытывает задержку 550 распространения (t3) на части 422 сигнала линии связи "земля - спутник" как результат влияния (текущего) расстояния между мобильным блоком 124 и спутниковым ретранслятором 116. В спутниковом ретрансляторе 116 реакция на команду управления мощностью испытывает задержку 560, связанную с обработкой (ts), когда спутниковый ретранслятор 116 обрабатывает часть 422 сигнала линии связи "земля - спутник" для того, чтобы передать часть 424 сигнала линии связи "спутник - земля" на шлюз 120. Далее реакция на команду управления мощностью испытывает задержку 570 распространения (t4) на части 424 сигнала линии связи "спутник - земля" как результат влияния расстояния между спутниковым ретранслятором 116 и шлюзом 120.
В шлюзе 120 реакция на команду управления мощностью обрабатывается приемником 214, 216 и 218 и управляющим процессором 320. В результате этой обработки шлюз 120 определяет уровень принимаемой мощности сигнала 420 обратной линии и определяет новую команду управления мощностью на основе уровня принимаемой мощности, как обсуждалось выше. Во время этой обработки реакция на команду управления мощностью (то есть, обнаруженный уровень мощности сигнала обратной линии) испытывает небольшую задержку 580, связанную с ее обработкой (tg).
Реакция на команду управления мощностью испытывает суммарную задержку 585 в обратной линии (tобратное), выражаемую как:
treverse=t3+ts+t4+tg
Задержка 585 в обратной линии представляет собой величину задержки между моментом, когда мобильный блок 124 выдает реакцию на команду управления мощностью, и моментом, когда шлюз 120 обнаруживает эту реакцию.
Общая задержка 590 (tdelay) с момента, когда шлюз 120 послал команду управления мощностью, до момента реакции на эту команду управления мощностью, обнаруженной шлюзом 120, определяется как:
tdelay=tforward+treverse=t1+t2+t3+t4+tm+tg+2•ts
На практике основную часть задержки 590 составляют задержки t1, t2, t3 и t4. При обычном применении спутников на НОО при использовании настоящего изобретения каждая задержка 545, 585 распространения составляет порядка 9-26 мс. Общая задержка 590 составляет порядка 18-53 мс. Общая задержка 590 называется также задержкой 590 распространения сигнала в прямом и обратном направлениях.
В системах спутниковой связи, в шлюзах 120 обычно имеется весьма точная оценка значений задержек, испытываемых сигналами, проходящими между шлюзами 120 и спутниками 116 (то есть, t1 и t4) в любой данный момент времени из-за того, что формы орбит, используемых спутниками 116, точно определены и известны места расположения шлюзов 120 относительно этих орбит.
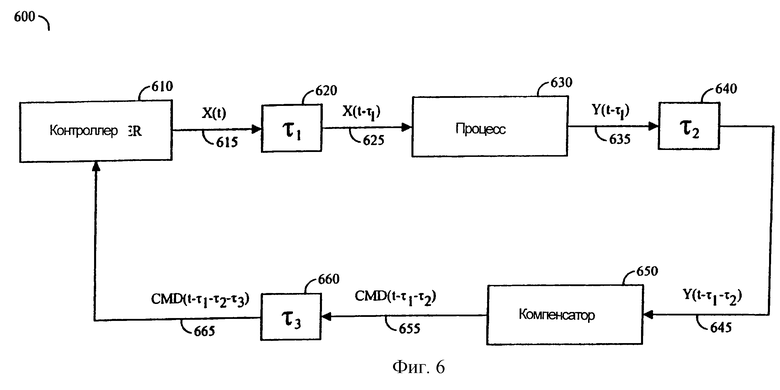
На фиг.6 показан контур 600 управления мощностью. Контур 600 управления мощностью включает в себя контроллер 610, первый блок 620 задержки, процесс 630, второй блок 640 задержки, компенсатор 650 и третий блок 660 задержки. В одном варианте осуществления настоящего изобретения контроллер 610, расположенный в мобильном блоке 124, реализует функции контура управления мощностью в приемопередатчике 200, в частности, функции управляющего процессора 220 и цифрового контроллера 228 мощности передачи, показанных на фиг.2. Кроме того, согласно данному варианту осуществления настоящего изобретения компенсатор 650, расположенный в шлюзе 120, реализует функции контура управления мощностью в процессоре 320 управления, как показано на фиг.3.
Далее раскрыто функционирование контура 600 управления мощностью со ссылками на фиг.6 и дополнительными ссылками на фиг.4 и 5. Контроллер 610 выдает сигнал 615 (показанный на фиг.6 как (x(t)) с конкретным уровнем мощности передачи. В предпочтительном варианте осуществления настоящего изобретения сигнал 615 представляет собой часть 422 сигнала линии связи "земля - спутник" для обратной линии 420 от мобильного блока 124 к шлюзу 120. Сигнал 615 испытывает задержку τ1, проходя через блок 620 задержки. В данном варианте τ1 соответствует оценке задержки 550 распространения (показанной как t3 на фиг.5), как было раскрыто выше. В результате действия блока 620 задержки сигнал 615 преобразуется в сигнал 625 (показанный на фиг.6 как x(t-τ1)). Сигнал 625 соответствует сигналу 615, задержанному на время τ1.
При обычном применении спутников на НОО, где используется настоящее изобретение, задержки 510, 530, 550 и 570 распространения намного превышают задержки 520, 540, 560 и 580, связанные с обработкой, в связи с чем задержки 520, 540, 560 и 580, связанные с обработкой, игнорируются. В альтернативном варианте можно использовать точные оценки указанных задержек обработки, если они известны. Таким образом, как было раскрыто выше, τ1 аппроксимируется величиной t3. Кроме того, как раскрыто ниже, τ2 аппроксимируется величиной t4, а τ3 аппроксимируется суммой t2+t3. Очевидно, что, если задержки обработки 520, 540, 560 и 580 значительны по сравнению с задержками распространения 510, 530, 550 и 570, то они также могут быть учтены в τ1, τ2 и τ3. При обсуждении данного вопроса термин "задержка распространения" включает также любые задержки, связанные с обработкой.
Сигнал 625 поступает в блок 630 процесса. Блок 630 процесса имитирует затухание и другие эффекты, такие как замирание, когда сигнал 625 распространяется от мобильного блока 124 к шлюзу 120. Другими словами, блок 630 процесса представляет передаточную функцию атмосферы/среды, через которую проходит сигнал 625, когда он распространяется от мобильного блока 124 к шлюзу 120 через спутник 116. Сигнал 635 (показанный на фиг. 6 как y(t-τ1)) поступает из блока 630 процесса. Очевидным является, что сигнал 635 представляет собой сигнал 625 после затухания и затирания.
Далее сигнал 635 задерживается блоком 640 задержки. Сигнал 635, проходя через блок 640 задержки, испытывает задержку τ2. В данном варианте τ2 соответствует оценке задержки 570 распространения (показанной, на фиг.5 как t4), как было раскрыто выше. В результате воздействия блока 640 задержки сигнал 635 преобразуется в сигнал 645 (показанный на фиг.6 как y(t-τ1-τ2)). Сигнал 645 соответствует сигналу 635, задержанному на интервал τ2. Задержка τ2 представляет задержку распространения части сигнала по линии связи "спутник - земля" для обратной линии 420, как было раскрыто выше.
Сигнал 645 представляет собой сигнал, принимаемый шлюзом 120 и передаваемый от мобильного блока 124. В частности, сигнал 645 представляет сигнал, переданный мобильным блоком 124, после того как он был задержан на величину τ1 и τ2 и подвергнут затуханию и замиранию в соответствии с воздействием со стороны блока 630 процесса.
Компенсатор 650 получает сигнал 645 и определяет уровень мощности сигнала 645 в соответствии с хорошо известными методами. Как было раскрыто выше, желательно, чтобы уровень мощности сигнала 645 совпадал с минимальным требуемым уровнем мощности. Например, если уровень мощности сигнала 645 меньше требуемого уровня мощности, то тогда компенсатор 650 выдает команду управления мощностью, которая дает указание контроллеру 610 увеличить мощность передачи сигнала 615. С другой стороны, если уровень мощности сигнала 645 больше требуемого уровня мощности, то тогда компенсатор 650 выдает команду управления мощностью, которая дает указание контроллеру 610 уменьшить уровень мощности передачи сигнала 615.
В предпочтительном варианте осуществления настоящего изобретения компенсатор 650 выдает однобитовую команду управления мощностью. Другими словами, компенсатор 650 либо выдает команду на повышение мощности, либо команду на снижение мощности. Общий анализ указанной системы управления мощностью раскрыт в патенте США 5396516 "Method And Apparatus For The Dynamic Modification of Control Parameters In A Transmitter Power Control System", выданном 7 марта 1995 г., права на который принадлежат обладателю прав на настоящее изобретение и содержание которого включено в настоящее описание посредством ссылки. В предпочтительном варианте осуществления настоящего изобретения команда на повышение мощности указывает контроллеру 610 увеличить мощность передачи сигнала 615 на фиксированную величину, например, на 1 дБ. Команда на снижение мощности указывает контроллеру 610 уменьшить мощность передачи сигнала 615 на фиксированную величину, например на 1 дБ. Очевидно, что можно использовать и другие фиксированные величины. Также очевидно, что в командах управления мощностью можно использовать большее количество бит, чтобы обеспечить варьирование уровней регулировок управления мощностью.
Кроме того, в предпочтительном варианте осуществления настоящего изобретения компенсатор 650 выдает команду на повышение мощности сигнала 645 ниже требуемого уровня мощности. Во всех других случаях компенсатор 650 выдает команду на снижение мощности. Очевидно, что могут быть реализованы дополнительные уровни, которые обеспечат команду нулевой мощности, когда уровень принимаемой мощности сигнала 645 находится в заданном диапазоне требуемых уровней мощности.
В другом варианте осуществления настоящего изобретения команда на повышение мощности увеличивает уровень мощности сигнала 615 на первую фиксированную величину, а команда на снижение мощности уменьшает уровень мощности сигнала 615 на вторую фиксированную величину, причем первая фиксированная величина меньше второй фиксированной величины. При этом варианте контур 600 управления мощностью уменьшает уровень мощности сигнала 615 гораздо быстрее, чем увеличивает уровень мощности сигнала 615. При таком варианте реакция на уменьшение уровней мощности сигналов в системе связи с МДКР происходит быстрее, что, как было раскрыто выше, уменьшает величину помех, которые испытывает любой конкретный сигнал.
Компенсатор 650 подает команду 655 (показанную на фиг.6 как CMDr(t-τ1-τ2)). Как было описано выше по отношению к предпочтительному варианту настоящего изобретения, команда 655 управления мощностью является либо командой на повышение мощности, либо командой на снижение мощности. Команда 655 управления мощностью выдается компенсатором 650 в ответ на сигнал 615, который был задержан из-за распространения по обратной линии 420 на величину, равную τ1+τ2 (то есть, задержка распространения в одном направлении).
Команда 655 управления мощностью передается от шлюза 120 на мобильный блок 124 через прямую линию 410. Когда команда 655 управления мощностью распространяется по прямой линии 410, эта команда испытывает еще одну задержку распространения, представленную блоком 660 задержки. Блок 660 задержки задерживает команду 655 управления мощностью на величину τ3, которая соответствует задержкам распространения как по части 412 линии связи "земля - спутник", так и по части 414 линии связи "спутник - земля" для прямой линии 410. В этом варианте осуществления настоящего изобретения τ3 соответствует сумме задержек 510 и 520 (показанных на фиг.5 как t1 и t2).
Выходом из блока 660 задержки является сигнал 665 (показанный на фиг.6 как CMDr(t-τ1-τ2-τ3)). Сигнал 665 представляет собой команду 655 управления мощностью с задержкой распространения между шлюзом 120 и мобильным блоком 214. Сигнал 665 поступает в контроллер 610. В предпочтительном варианте осуществления настоящего изобретения сигнал 665 указывает контроллеру 610 либо увеличить мощность передачи сигнала 615 на фиксированную величину, либо уменьшить мощность передачи сигнала 615 на фиксированную величину. Однако, как было описано выше, сигнал 615 в контуре 600 управления мощностью испытывает общую задержку, равную τ1+τ2+τ3 секунд. Другими словами, между моментом передачи сигнала 615 от мобильного блока 124 и моментом принятия мобильным блоком 124 команды управления мощностью, посланной компенсатором 650 для изменения уровня мощности сигнала 615, проходит τ1+τ2+τ3 секунд. В случае, когда τ1+τ2+τ3 представляет собой значительную величину (например, превышает время итерации контура контроллера 610), такая задержка создает значительную проблему при управлении уровнем мощности 615.
В частности компенсатор 650 не обнаружит изменение в уровне мощности сигнала 615 в ответ на команду, пока не пройдет время, равное τ1+τ2+τ3. Если время итерации компенсатора 650 мало по сравнению с τ1+τ2+τ3, то компенсатор 650 выдаст множество команд 655 управления мощностью, прежде чем будут обнаружены какие-либо реакции на эти команды 655 управления мощностью в виде сигнала 645. Это приводит к явлению в контуре 600 управления мощностью, которое называется предельным циклом.
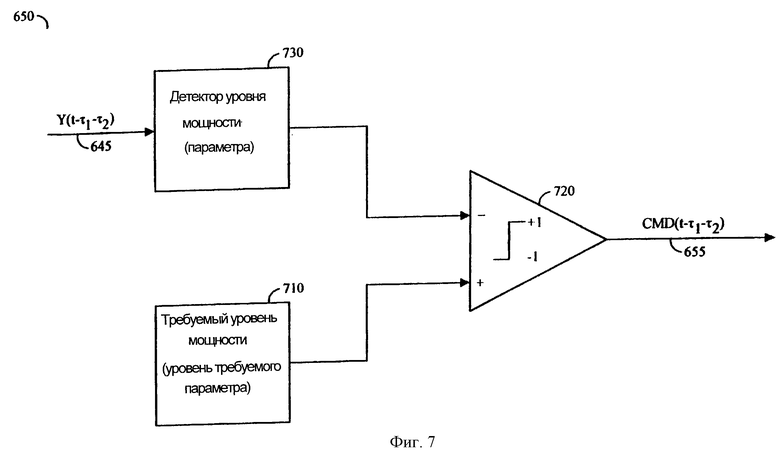
На фиг. 7 подробно показан процесс функционирования стандартного компенсатора 650. Стандартный компенсатор 650 содержит требуемое пороговое значение 710 уровня мощности (либо другого соответствующего параметра), детектор 730 уровня мощности (соответствующего параметра) и компаратор 720. Детектор 730 уровня мощности определяет уровень мощности сигнала 645 в соответствии с хорошо известными методами, применяемыми в системах связи. Компаратор 720 определяет разность между уровнем мощности сигнала 645 от детектора 730 уровня мощности и требуемым пороговым значением 710 уровня мощности. Компаратор 720 выдает команду на повышение мощности, когда уровень мощности сигнала 645 меньше требуемого порогового значения 710 уровня мощности. Компаратор 720 выдает команду на снижение мощности, когда уровень мощности сигнала 645 больше требуемого порогового значения 710 уровня мощности.
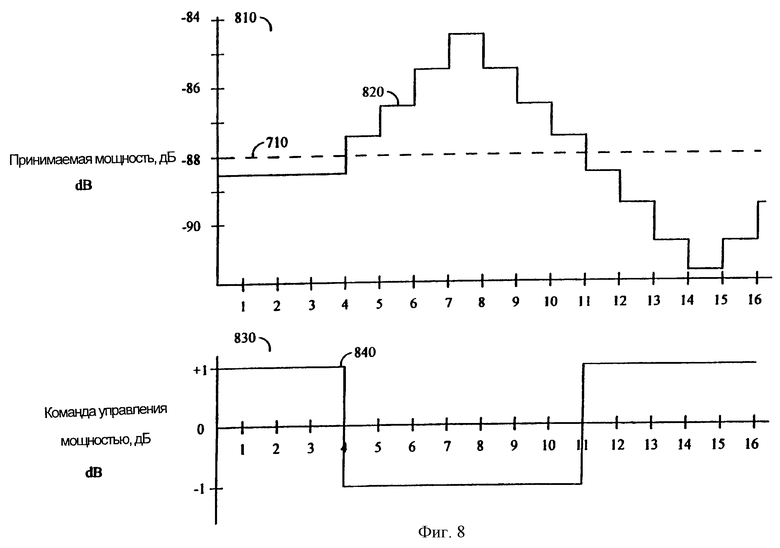
На фиг. 8 показана работа стандартного компенсатора 650. На фиг.8 представлены два графика: график 810 принимаемой мощности и график 830 команды управления мощностью. График 810 принимаемой мощности является примером изменения уровня 820 принимаемой мощности сигнала 645, получаемого стандартным компенсатором 650, в функции времени. График 830 команды управления мощностью представляет собой команду 840 управления мощностью, выдаваемую стандартным компенсатором 650 в соответствии с уровнем 820 принимаемой мощности, в функции времени. Далее раскрыта работа стандартного компенсатора 650, реагирующего на изменения уровня 820 принимаемой мощности.
Как показано на фиг. 8, в момент t=0 уровень 820 принимаемой мощности составляет -88,5 дБ. В данном конкретном примере требуемое пороговое значение 710 уровня мощности установлено на уровне -88 дБ, причем это значение уровня выбирается в каждой системе связи в соответствии с известными принципами. Таким образом уровень 820 принимаемой мощности меньше требуемого уровня 710 мощности. В соответствии с этим, стандартный компенсатор 650 выдает контроллеру 610 команду на повышение мощности, указывающую, что контроллеру 610 следует увеличить мощность передачи сигнала 615. Таким образом, команда 840 управления мощностью в момент t=0 имеет значение +1. (В данном примере на графике команд управления мощностью 830 команды на повышение мощности обозначены как +1, а команды на снижение мощности обозначены как -1).
Последующие предположения сделаны лишь в целях иллюстрации, чтобы продемонстрировать работу стандартного компенсатора 650. Первое предположение состоит в том, что время итерации контура для стандартного компенсатора 650 выбирается произвольно как одна четвертая часть общей задержки τ1+τ2+τ3, являющейся результатом задержек распространения. Другими словами стандартный компенсатор 650 выдает четыре команды 655 управления мощностью, прежде чем будет обнаружена команда 655 управления мощностью, в виде принимаемого стандартным компенсатором 650 уровня 820 мощности. Второе предположение состоит в том, что команда на повышение мощности указывает контроллеру 610 увеличить уровень мощности сигнала 615 на 1 дБ и что команда на снижение мощности указывает контроллеру уменьшить уровень мощности сигнала 615 на 1 дБ. Эти предположения сделаны исключительно с целью иллюстрации сущности изобретения и приемлемы для обычных систем связи. Однако каждая система имеет свои собственные времена итерации и известные уровни команд.
Обратимся теперь к фиг.9. Из-за задержек распространения в момент t=l реакция на команду 840 управления мощностью, выдаваемую в момент t=0, еще не обнаружена компенсатором 650. Таким образом, уровень 820 принимаемой мощности пока еще меньше требуемого порогового значения 710 уровня мощности. Следовательно, компенсатор 650 выдаст в момент t=l еще одну команду на повышение мощности. То же самое произойдет в моменты времени t=2 и t=3.
Однако в момент t=4 команда на повышение мощности, выданная в момент t= 0, уже принята контроллером 610 и ее действие распространилось обратно на стандартный компенсатор 650. Другими словами, в момент t=4 стандартный компенсатор 650 обнаруживает изменение уровня 820 принимаемой мощности в результате воздействия команды 840 управления мощностью, выданной в момент t= 0. Таким образом, в момент t=4 уровень 820 принимаемой мощности увеличивается на 1 дБ до -87,5 дБ. В момент t=4 стандартный компенсатор 650 определяет, что уровень 820 принимаемой мощности превышает требуемое пороговое значение 710 уровня мощности и, следовательно, выдаст команду на снижение мощности. Как обсуждалось выше, команда на снижение мощности дает указание контроллеру 610 уменьшить мощность передачи сигнала 615.
В момент t=5 стандартный компенсатор 650 обнаруживает дополнительное увеличение уровня 820 принимаемой мощности в результате действия команды 840 управления мощностью, выданной в момент t=l. Таким образом, из-за задержки между моментом выдачи команд 840 управления мощностью и моментом обнаружения реакции на эти команды уровень 820 принимаемой мощности возрастает для каждой из четырех команд на повышение мощности, выданных в моменты времени t= 0, t= l, t=2 и t=3. В результате уровень 820 принимаемой мощности перекрывает требуемое пороговое значение 710 уровня мощности на 3,5 дБ.
Вышеизложенные соображения хорошо иллюстрируют проблему предельного цикла, описанную выше. Из-за задержки τ1+τ2+τ3 стандартный компенсатор 650 выдает команды на повышение мощности с момента времени t=0 до момента t=3. Каждая из этих команд на повышение мощности принимается контроллером 610, результатом чего является увеличение мощности передачи сигнала 615. Однако, в момент t= 4, когда уровень 820 принимаемой мощности превышает требуемое пороговое значение 710 уровня мощности, компенсатор 650 начинает выдавать команды на снижение мощности и продолжает выдавать команды на снижение мощности вплоть до момента t=11. В момент времени t=11 уровень 820 принимаемой мощности упадет ниже требуемого уровня 710 мощности, и стандартный компенсатор 650 начнет снова выдавать команды на повышение мощности. Этот процесс продолжается неопределенно долго, причем уровень 820 принимаемой мощности колеблется относительно требуемого порогового значения 710 уровня мощности. Из-за задержки распространения τ1+τ2+τ3 уровень 820 принимаемой мощности, как правило, никогда не совпадает с требуемым пороговым значением 710 уровня мощности. Этот предельный цикл представляет наилучший процесс функционирования, на который способен стандартный компенсатор 650. То есть, предельный цикл показывает, насколько хорошо (или насколько близко к требуемому значению) компенсатор 650 может поддерживать сигналы на конкретном требуемом уровне мощности. Этот процесс показывает, что имеют место непроизводительные затраты мощности, в результате чего уменьшается пропускная способность системы и рабочее время мобильных блоков.
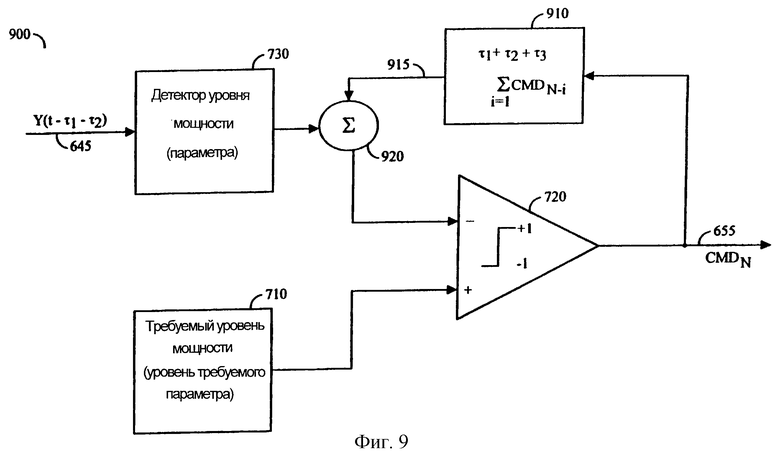
На фиг.9 показан усовершенствованный компенсатор 900 согласно настоящему изобретению. В настоящем изобретении компенсатор 900 используется вместо стандартного компенсатора 650 на фиг.6. Компенсатор 900 учитывает команды управления мощностью 655, которые были выданы компенсатором 900 и для которых не хватило времени на то, чтобы реакции на эти команды поступили обратно в компенсатор 900.
В частности, компенсатор 900 содержит блок требуемого порогового значения 710 уровня мощности, детектор 730 уровня мощности, компаратор 720, накопитель 910 необработанных команд и сумматор 920. Детектор 730 уровня мощности и блок требуемого порогового значения 710 уровня мощности функционирует так же, как было описано выше в связи со стандартным компенсатором 650.
Накопитель 910 необработанных команд накапливает сумму 915 необработанных команд управления мощностью 655, которые были выданы компенсатором 900, но еще не прошли через контур 600 управления, с тем чтобы компенсатор 900 обнаружил соответствующую реакцию. В одном варианте осуществления накопитель 910 накапливает регулировки в виде командных шагов на увеличение или уменьшение мощности для достижения пошагового изменения, которое затем преобразуется в общее изменение мощности. В другом варианте накопитель 910 накапливает значение мощности (а именно в дБ), связанной с каждой выдаваемой командой. Накопитель 910 необработанных команд определяет необработанные команды 655 управления мощностью с итерацией N согласно следующему соотношению: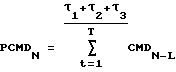 ,
,
где PCMDN - сумма необработанных команд с итерацией N;
τ1+τ2+τ3 - общая задержка на распространение сигнала в прямом и обратном направлении;
Т - период итерации контура.
На практике количество накопленных команд управления мощностью зависит от задержек распространения, которые испытывает сигнал 410 прямой линии и сигнал 420 обратной линии, и времени итерации контура 600 управления. Например, если общая задержка распространения составляет 50 мс, а период итерации контура 600 управления составляет 12,5 мс, то накопитель 910 необработанных команд накапливает четыре команды 655 управления мощностью.
Накопитель 910 необработанных команд выдает уровень мощности, соответствующий сумме 915 команд управления мощностью, реакции на которые еще не обнаружены в сумматоре 920. Сумматор 920 добавляет выходной сигнал накопителя 910 необработанных команд к уровню 645 принимаемой мощности. Сумматор 920 выдает сумму этих сигналов на компаратор 720.
Компаратор 720 выдает команду на повышение мощности, если выходной сигнал сумматора 920 меньше требуемого порогового значения 710 уровня мощности. Компаратор 720 выдает команду на снижение мощности, если выходной сигнал сумматора 920 больше требуемого порогового значения 710 уровня мощности.
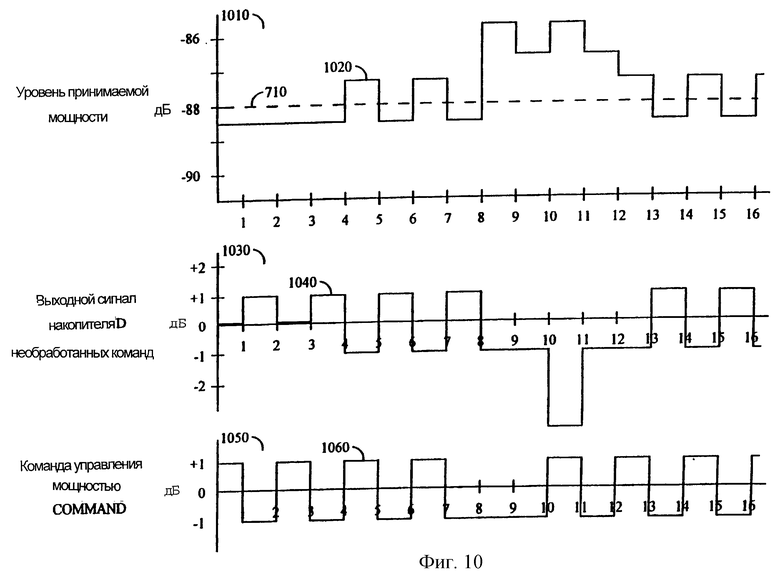
Работа компенсатора 900 показана на фиг.10. Здесь исключительно с целью иллюстрации приняты те же предположения, что были сделаны выше в отношении фиг.8. Эти предположения состоят в том, что выдаются четыре команды управления мощностью, прежде чем обнаруживается действие первой из них, и что команды на повышение и на снижение мощности изменяют уровень мощности сигнала 615 на 1 дБ.
На фиг. 10 представлен график 1010 уровня принимаемой мощности, показывающий изменение уровня 1020 принимаемой мощности в функции времени; график 1030 выходного сигнала накопителя необработанных команд, показывающий изменение выходного сигнала 1040 накопителя необработанных команд в функции времени; и график 1050 команды управления мощностью, показывающий изменение команды или команд 1060 управления мощностью в функции времени.
Обратимся к фиг.10, где в момент t=0 уровень 1020 принимаемой мощности составляет -88,5 дБ. Требуемое пороговое значение 710 уровня мощности установлено на уровне -88 дБ. Таким образом, в момент t=0 уровень 1020 принимаемой мощности меньше требуемого порогового значения 710 уровня мощности. Если предположить, что команды управления уровнем мощности ранее не выдавались (то есть, нет необработанных команд управления мощностью), то компенсатор 900 выдаст в момент t=0 команду на повышение мощности.
В момент t=1, поскольку реакция на команду на повышение мощности еще не прошла через контур 600 управления мощностью, уровень 1020 принимаемой мощности остается ниже требуемого порогового значения 710 уровня мощности. Однако в этом случае выходной сигнал 1040 накопителя необработанных команд в момент времени t=1 будет равен 1 дБ, представляя первую команду управления мощностью, которая уже была выдана, но реакция на которую еще не обнаружена.
При добавлении выходного сигнала 1040 накопителя необработанных команд к уровню 1020 принимаемой мощности будет превышено требуемое пороговое значение 710 уровня мощности. Таким образом, в этом случае компаратор 720 выдаст команду на снижение мощности, учитывающую уровень 1020 принимаемой мощности в момент t=l, а также команду 1060 управления мощностью в момент t=0.
В момент t= 2 компенсатор 900 пока не обнаружил реакцию на какую-либо команду 1060 управления мощностью, выданную в момент t=0 или t=1. В момент t=2 выходной сигнал 1040 накопителя необработанных команд управления мощностью представляет собой сумму команд управления мощностью в момент t=0 и в момент t= 1, которая равна 0. Добавление выходного сигнала 1040 накопителя необработанных команд в момент t=2 к уровню 1020 принимаемой мощности в момент t=2 указывает, что сумма меньше требуемого порогового значения 710 уровня мощности. Таким образом, компаратор 720 в момент t=2 выдает команду на повышение мощности. Подобный же процесс происходит в момент t=3 для выдачи команды на снижение мощности.
В момент t= 4 компенсатор 900 обнаруживает реакцию на команду 1060 управления мощностью, выданную в момент t=0. В результате уровень 1020 принимаемой мощности в момент t=4 увеличивается на 1 дБ. В момент t=4 уровень 1020 принимаемой мощности превышает требуемый уровень мощности 710. Однако компенсатор 900 еще не обнаружив ни одной из необработанных команд 1060 управления мощностью. В действительности, в момент t=4 выходной сигнал 1040 накопителя показывает сумму, равную изменению на -1 дБ уровня 1020 принимаемой мощности. Суммирование уровня 1020 принимаемой мощности и выходного сигнала 1040 накопителя необработанных команд в момент t=4 указывает, что в момент t= 4 следует выдавать команду на повышение мощности, поскольку сумма выходного сигнала 1040 накопителя необработанных команд и уровня 1020 принимаемой мощности меньше требуемого порогового значения 710 уровня мощности.
Между моментами времени t=4 и t=8 значение команды 1060 управления мощностью колеблется от +1 до -1 и обратно, когда уровень 1020 принимаемой мощности колеблется относительно требуемого порогового значения 710 уровня мощности. Этот процесс представляет предельный цикл компенсатора 900. По сравнению с предельным циклом уровня 820 принимаемой мощности на фиг.8 в данном случае компенсатор 900 существенно улучшает качество функционирования контура управления мощностью 600.
Для дальнейшей иллюстрации в момент t=8 в блоке 630 процесса возникает замирание, приводящее к несанкционированному изменению уровня 1020 принимаемой мощности на +2 дБ (вдобавок к санкционированному изменению на +1 дБ по команде на повышение мощности в момент t=4), в результате чего уровень 1020 принимаемой мощности составит -85,5 дБ. Таким образом, в момент t=8 уровень 1020 принимаемой мощности суммируется с выходным сигналом 1040 накопителя необработанных команд и подается на вход компаратора 720. Компаратор 720 выдает команду на снижение мощности. Из-за задержек распространения τ1+τ2+τ3 команда на снижение мощности не будет обнаружена компенсатором 900 в момент t=8 и вплоть до момента t=12. Таким образом, между моментами времени t=8 и t=12 уровень 1020 принимаемой мощности колеблется относительно -86 дБ. То есть, процессы в контуре управления с задержкой (например, задержкой распространения), значение которой велико по сравнению со временем итерации контура (то есть, частотой отбора или частотой обновления информации в контуре), имеют колебательный характер, на который также влияет уровень квантования.
Однако последующие команды на снижение мощности в моменты времени t=9 и t= 10, за которыми следует команда на повышение мощности в момент t=11, показывают эффективность воздействия выходного сигнала 1040 накопителя необработанных команд при возвращении уровня 1020 принимаемой мощности в предельный цикл относительно требуемого порогового значения 710 уровня мощности в момент t=13 в ответ на замирание в момент t=8.
Компенсатор 900 фактически учитывает команды, которые еще не прошли через контур 600 управления мощностью. Накопитель 910 необработанных команд учитывает эти команды управления мощностью, так что будущие команды управления мощностью формируются на основе необработанных, но еще не обнаруженных изменений уровня 1020 принимаемой мощности.
На фиг.11 показана блок-схема, иллюстрирующая сущность настоящего изобретения. На этапе 1110 компенсатор 900, расположенный на первой станции, принимает сигнал 645. В предпочтительном варианте осуществления настоящего изобретения первая станция соответствует шлюзу 120. Однако в альтернативных вариантах осуществления настоящего изобретения компенсатор 900 расположен в мобильном блоке 124.
На этапе 1120 детектор 730 уровня мощности измеряет уровень мощности сигнала 645 в соответствии с известными методами. На этапе 1130 компенсатор 900 определяет команду 655 управления мощностью на основе измеренной мощности сигнала 645, требуемого уровня 710 мощности и суммы 915 необработанных команд 655 управления мощностью. На этапе 1140 команда 655 управления мощностью посылается на первую станцию с тем, чтобы можно было соответственно увеличить или уменьшить мощность сигнала 645.
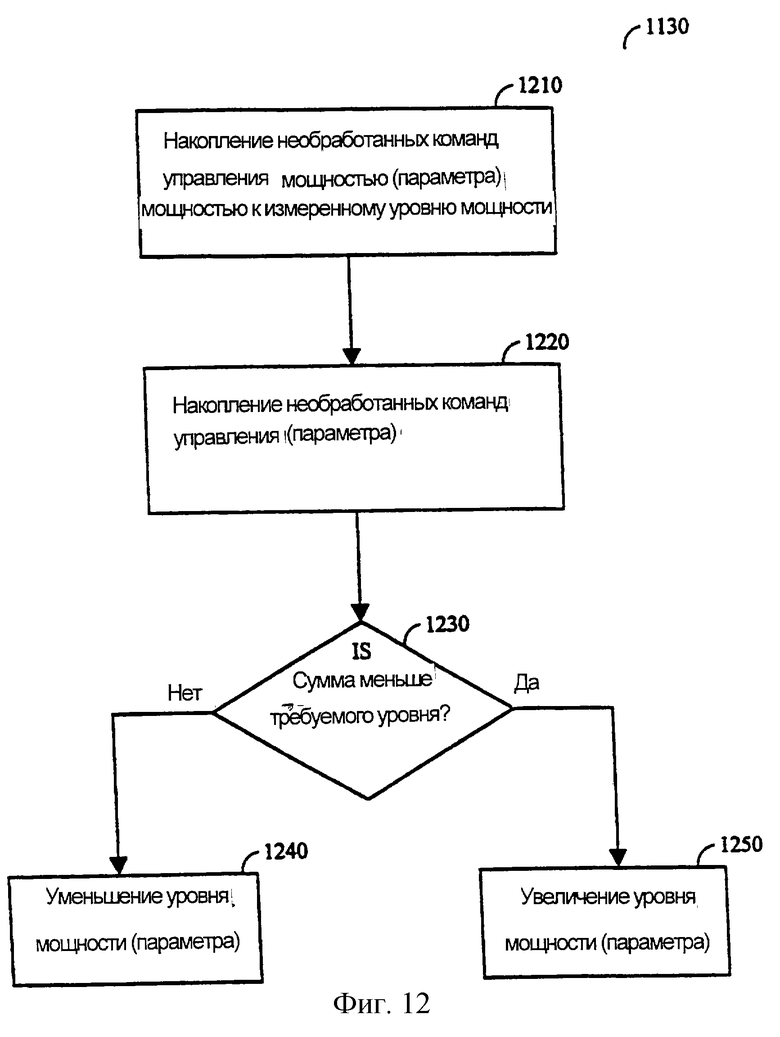
На фиг. 12 представлена блок-схема, на которой более подробно показана работа компенсатора 900. В частности, фиг.12 иллюстрирует операцию, выполняемую на этапе 1130, которая была рассмотрена выше со ссылками на фиг.11. На этапе 1210 накопитель 910 необработанных команд накапливает необработанные команды 655 управления мощностью. Как было рассмотрено выше, необработанные команды 655 управления мощностью - это команды управления, реакциям на которые не хватило времени для прохождения в компенсатор 900.
На этапе 1220 уровень мощности, соответствующий необработанным командам 655 управления, добавляется к уровню мощности принимаемого сигнала 645. На этапе 1230 принятия решения сумма необработанных команд 655 управления и мощности принимаемого сигнала 645 сравнивается с требуемым уровнем 710 мощности.
Если сумма необработанных команды 655 управления и мощности принимаемого сигнала 645 меньше требуемого уровня 710 мощности, то на этапе 1250 выдается команда на увеличение уровня мощности сигнала 645. Если сумма необработанных команд 655 управления и мощности принимаемого сигнала 645 не меньше требуемого уровня 710 мощности, то на этапе 1240 выдается команда на уменьшение уровня мощности сигнала 645. Как было раскрыто выше, в предпочтительном варианте осуществления настоящего изобретения команда на повышение мощности выдается для увеличения уровня мощности сигнала 645, а команда на снижение мощности выдается для уменьшения уровня мощности сигнала 645.
В некоторых системах для определения других рабочих параметров сигналов связи, таких как частота, временные характеристики кода и т.д., могут быть использованы такие же или дополнительные элементы типа компенсатора 900. Затем могут быть сформированы соответствующие команды, такие как команды на повышение и снижение параметра либо опережения и задержки, которые будут использоваться мобильным блоком 124 для изменения указанных параметров. Например, мобильному блоку 124 может быть дано указание отрегулировать рабочую частоту для сигналов обратной линии с целью предотвращения ухода центральной частоты гетеродина в мобильном блоке 124 либо могут быть изменены временные характеристики кода для компенсации доплеровских эффектов и т.д. Известно множество параметров и процессов, которые могли быть скомпенсированы с использованием соответствующих команд, но которые испытывают временные, задержки, или задержки передачи, вроде тех, которые возникают в случае команд управления мощностью, раскрытых выше.
Хотя настоящее изобретение было описано в терминах спутниковой системы 100 связи, его можно также реализовать и в системах, где спутники не используются. Например, подобная проблема, связанная с предельными циклами, может возникнуть в наземных системах, если время распространения сигнала между сотовым узлом и мобильным блоком 124 велико по сравнению со временем итерации контура в контуре 600 управления мощностью.
Кроме того, настоящее изобретение было раскрыто применительно к регулировке мощности передачи мобильного блока 124, когда компенсатор 900 расположен в шлюзе 120, а контроллер 610 расположен в мобильном блоке 124. Очевидно, что может быть выполнен аналогичный контур управления, где компенсатор 900 находится в мобильном блоке 124, а контроллер 610 - в шлюзе 120, так чтобы можно было управлять мощностью, передаваемой от шлюза 120.
В альтернативном варианте измерение мощности либо относительной мощности по отношению к пороговому значению можно выполнять в мобильном блоке 124, при этом полученная информация передается обратно в шлюз 120, где выполняется компенсация для регулировки мощности сигналов шлюза. Такой подход может оказаться предпочтительным, поскольку при этом снижаются требования к ресурсам и сложность мобильного блока 124, а также лучше используются вычислительные ресурсы шлюзов 120. В этом случае команды передаются не в виде сигналов 655 и 665, которые подвергаются задержке, а передаются в виде подвергаемых задержке информационных сигналов. Значения задержек в других отношениях те же самые.
Настоящее изобретение также описано в терминах однобитовой системы, где команды на повышение или снижение мощности выдавались компенсатором 900, указывая контроллеру 610 увеличить или уменьшить мощность передачи на фиксированную величину. Однако очевидным является, что могут быть реализованы и другие схемы, где команда управления мощностью квантуется в зависимости от разности между требуемым уровнем 710 мощности и уровнем 645 принимаемой мощности.
Приведенное выше описание предпочтительных вариантов представлено для того, чтобы дать возможность любому специалисту в данной области техники выполнить или использовать настоящее изобретение. Специалистам в данной области техники не составит труда предложить различные модификации к описанным вариантам и понять, что определенные здесь основополагающие принципы могут быть применены к другим вариантам без необходимости проявления каких-либо изобретательских способностей. Таким образом, подразумевается, что настоящее изобретение не сводится к раскрытым выше вариантам, а соответствует самому широкому объему охраны, согласующемуся с раскрытыми принципами и заявленными признаками.


Изобретение относится к системам связи с расширенным спектром. Технический результат заключается в снижении непроизвольных затрат мощности и снижении уровня системных помех. Для этого первая станция посылает команду управления мощностью на вторую станцию, давая указания второй станции либо увеличить, либо уменьшить уровень мощности передаваемого сигнала. Первая станция формирует команду управления мощностью на основе уровня мощности принимаемого сигнала, требуемого уровня мощности и одной необработанной команды управления мощностью, которые находятся на пути между первой и второй станциями. 4 с. и 36 з.п. ф-лы, 12 ил.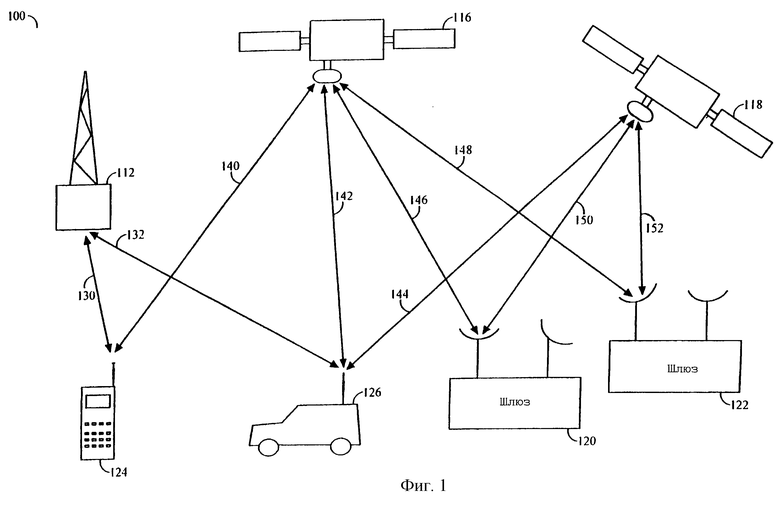
23. Устройство для управления уровнем мощности передаваемого сигнала в системе спутниковой связи, содержащее первую станцию, вторую станцию и спутниковую линию связи, соединяющую первую станцию и вторую станцию, причем передаваемый сигнал подвержен задержке распространения между первой станцией и второй станцией, включающее в себя детектор уровня мощности, расположенный на первой станции, для измерения уровня принимаемой мощности сигнала, передаваемого от второй станции на первую станцию, компенсатор, расположенный на первой станции, для формирования команды управления мощностью, которая указывает второй станции отрегулировать ее мощность передачи, и передатчик для посылки команды управления мощностью с первой станции на вторую станцию, причем компенсатор формирует команду управления мощностью в функции уровня принимаемой мощности, требуемого уровня мощности и по меньшей мере одной необработанной команды управления мощностью, посланной с первой станции на вторую станцию.
| НЕМИРОВСКИЙ А.С | |||
| и др | |||
| Системы связи и радиорелейные линии | |||
| - М.: Связь, 1980, с.317-319, 328-324 | |||
| US 5542111 А, 30.07.1996 | |||
| US 5241383 A, 31.08.1993. |
