Инструмент с поворотным устройством предназначен для применения в медицине при эндоскопических и миниинвазивных операциях, а также может быть использован и для других целей.
Известны устройства, позволяющие регулировать отклонение рабочей части от основной оси корпуса инструмента. В большинстве всех известных конструкций используется гибкая тяга или толкатели для передачи усилий от рукояток к рабочим частям.
Известно также использование гибкого вращающегося вала для передачи усилий к рабочим частям.
Однако при этом отмечается некоторая потеря в передаче прилагаемой силы из-за упругости гибкого вала и затруднена очистка и стерилизация его. Поэтому предлагается использовать вращающийся вал с системой зубчатых колес для передачи усилий под углом к основной оси инструмента.
В качестве прототипа инструмента выбрана конструкция по патенту "ПОВОРОТНОЕ УСТРОЙСТВО" RU 2098025 С1, 6 А 61 В 17/062, 17/28, 1993 г. Эта конструкция имеет дистанционное управление, дает возможность отклонять рабочую часть инструмента в широких пределах от основной оси инструмента, фиксировать выбранное положение, сохраняя жесткость конструкции, и имеет полый корпус, в котором располагается вращающийся вал. Полый корпус состоит из двух или более шарнирно соединенных частей с расположенными под углом α к продольной оси инструмента торцевыми поверхностями сопряжения, соединенными между собой полой осью, расположенной перпендикулярно к торцевым поверхностям. Механизм дистанционного управления и фиксации положения состоит из двух соосно расположенных цилиндров, один из которых связан с отклоняющейся частью посредством эксцентично расположенного поворотного штока.
Подобная конструкция наружного корпуса дает возможность создавать инструменты любой длины и конфигурации. Диаметр его может вариировать в очень широких пределах.
Отклонение происходит в объемно-сферической зоне. Максимальный угол отклонения составляет 180-2α градусов, где α - угол скоса торцевых поверхностей сопряжения (см. патент "Поворотное устройство").
Конструкция вращающегося вала вписывается в указанное выше "Поворотное устройство". В основной части корпуса инструмента, проксимальной к рукояткам, располагается ведущий вал. В проксимальной своей части он связан с рукоятками, в дистальной части имеет зубчатое колесо, входящее в зацепление с зубчатым колесом промежуточного вала. Промежуточный вал располагается в полой оси поворотного устройства, соединяющей его скошенные торцевые поверхности. Промежуточный вал имеет с каждого конца зубчатые колеса, находящиеся в зацеплении с зубчатыми колесами ведущего и ведомого валов. Ведомый вал расположен в дистальной, отклоняющейся части инструмента. В своей проксимальной части он имеет зубчатое колесо, находящееся в зацеплении с зубчатым колесом промежуточного вала. В дистальной части он связан с рабочими губками или через винтовую передачу с большим шагом и систему соответствующих шарниров, или через коническое зубчатое колесо, находящееся в зацеплении с коническими зубчатыми колесами рабочих губок или одной губки.
Вращающийся вал может быть и множественным. Для этого предусматривается соосное расположение двух и большего количества ведущего, промежуточного и ведомого валов, которые могут вращаться и передавать усилия в любую сторону, независимо друг от друга.
Подобное "Поворотное устройство", использующее указанную выше систему вращающихся валов для передачи усилий от рукояток к рабочим частям, предполагает определенные особенности в устройстве рукояток и рабочих частей.
Предлагаются следующие варианты устройства рукояток.
1) Рукоятки расположены в плоскости, перпендикулярной плоскости основной оси инструмента. В этом случае одна из рукояток расположена непосредственно на ведущем валу инструмента. Она может быть жестко связана с валом или связана с валом через систему шестеренок для уменьшения прилагаемых на рукоятку усилий. Движения рукоятки приводят в движение ведущий вал.
В этом варианте рукоятка может быть заменена рукояткой винта. При этом могут быть использованы поворотные устройства с двумя или более вращающимися валами, расположенными соосно (на одной оси), но независимо друг от друга.
2) Рукоятки расположены в плоскости основной оси инструмента:
а) передача движений рукоятки осуществляется через винтовую передачу с большим шагом;
б) передача движений рукоятки на ведущий вал осуществляется через конические зубчатые колеса, расположенные перпендикулярно друг к другу или под другим углом.
Рабочие части инструмента связаны с ведомым валом
1) через винтовую передачу с большим шагом;
2) через конические зубчатые колеса, расположенные перпендикулярно друг к другу или под другим углом, при этом ведомый вал может быть связан с одной губкой рабочей части или с обеими губками.
Схемы инструмента с поворотным устройством представлены на фиг.1-12, где
1 - наружный корпус проксимальной части инструмента;
2 - внутренний корпус проксимальной части;
3 - корпус дистальной части инструмента;
4 - скошенная торцевая поверхность проксимальной части;
5 - скошенная торцевая поверхность дистальной части;
6 - эксцентричный выступ на наружном корпусе проксимальной части;
7 - гнездо на дистальном корпусе 3 для эксцентричного выступа 6;
8 - полая ось;
9 - промежуточная часть вращающегося вала;
10 и 11 - зубчатые колеса на концах промежуточного вала;
12 - ведомый вращающийся вал;
13 - зубчатое колесо на ведомом валу;
14 - ведущий вращающийся вал;
15 - зубчатое колесо на ведущем валу;
16 - направляющая прорезь на наружной проксимальном корпусе;
17 - направляющий выступ на внутреннем проксимальном корпусе;
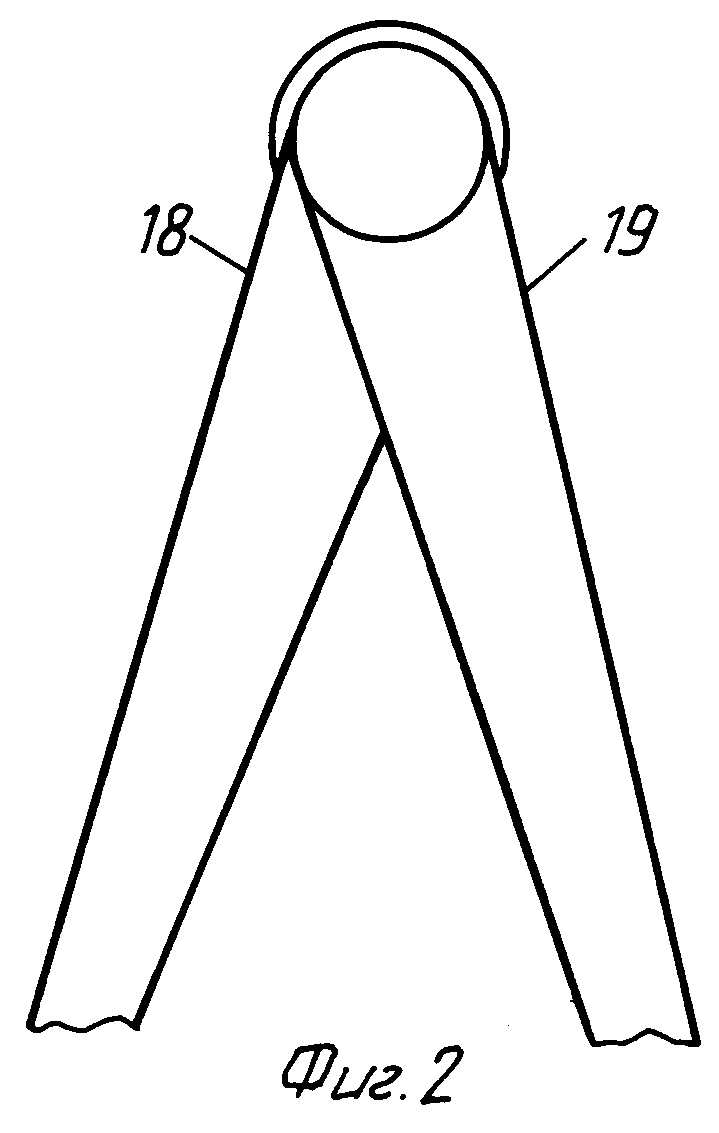
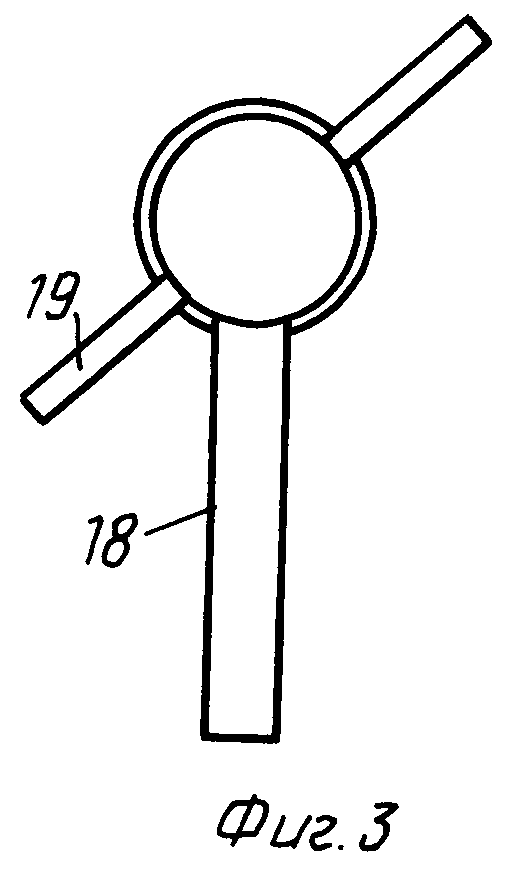
18 - неподвижная рукоятка;
19 - подвижная рукоятка;
20 - зубчатое колесо на подвижной рукоятке;
21 - зубчатое колесо на ведущем вращающимся валу;
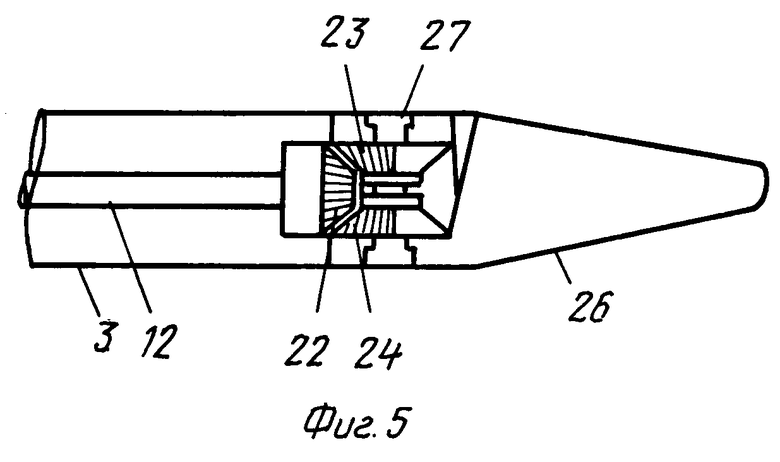
22 - коническое зубчатое колесо на ведомом валу 12;
23 и 24 - конические зубчатые колеса на рабочих губках 25 и 26;
25 и 26 - рабочие губки инструмента;
27 - ось рабочих губок;
28 - прорезь в подвижной рукоятке 19;
29 - подвижный цилиндр в корпусе 2 с внутренней винтовой резьбой с большим шагом;
30 - выступ в подвижном цилиндре 29, входящий в прорезь 28;
31 - винтовая нарезка на ведущем валу с большим шагом;
32 - цилиндр на ведомом валу с внутренней винтовой нарезкой с большим шагом;
33 - шток с винтовой нарезкой с большим шагом; связанный системой шарниров с рабочими губками или одной рабочей губкой при неподвижености другой;
34 - система шарниров, связывающая шток 33 с рабочими губками 24 и 25;
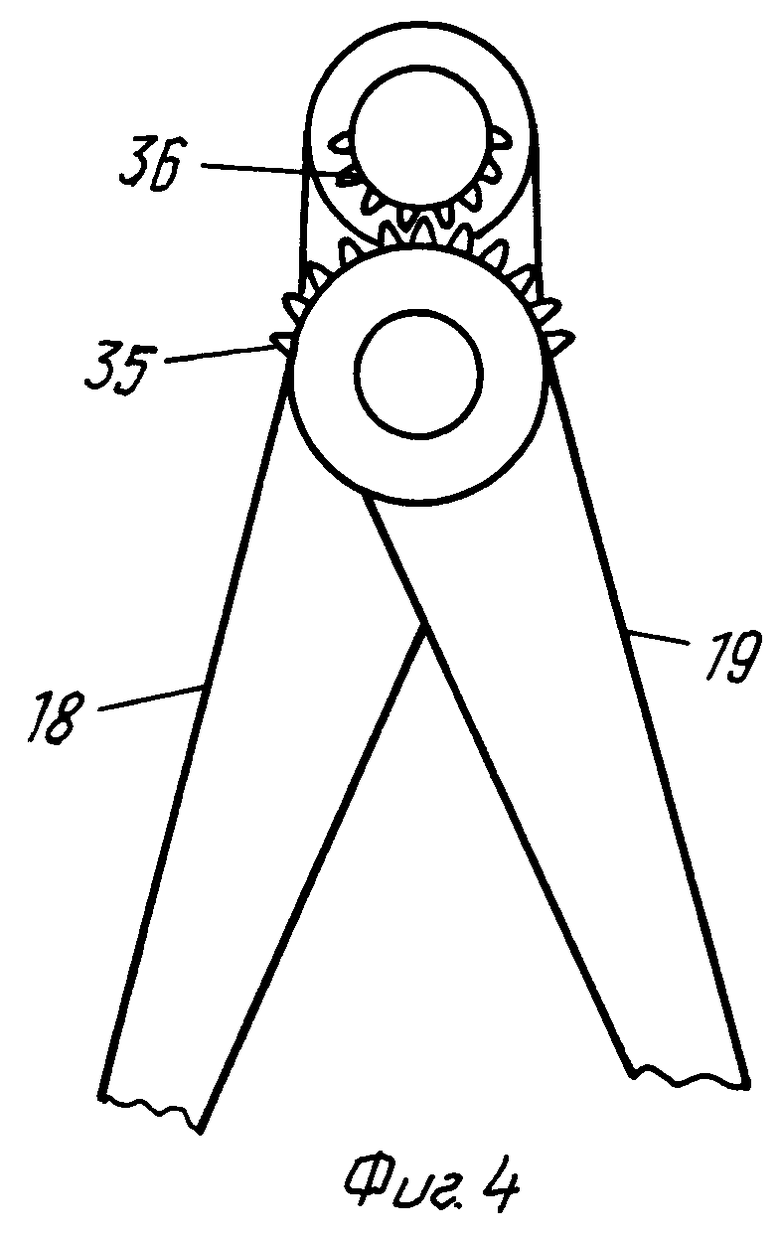
35 - коническое зубчатое колесо на подвижной рукоятке;
36 - коническое зубчатое колесо на ведущем валу.
На фиг.1-5 представлен общий вид инструмента. Основу его составляет Поворотное устройство по патенту 2098025. Проксимальная к рукояткам часть его состоит из двух соосно расположенных частей 1 и 2 со скошенной торцевой поверхностью 4 и тесно сопряженной с ней дистальной частью 3 также со скошенной торцевой поверхностью 5. В центре скошенных под одним и тем же углом α поверхностей, перпендикулярно к ним, располагается полая ось 8, закрепленная на одной из скошенных торцевых поверхностей. Другая скошенная торцевая поверхность свободно вращается на этой оси.
Одна из частей имеет эксцентричный выступ 6, входящий в зацепление с другой частью (гнездо 7).
Вращающийся вал располагается в центральном канале корпуса инструмента и его Поворотного устройства и состоит из трех частей: в проксимальной к рукояткам части инструмента располагается ведущий вал 14, в оси поворотного устройства - передаточный вал 9, в дистальной части - ведомый вал 12.
Ведущий вал 14 заканчивается зубчатым колесом 15, входящим в зацепление с зубчатым колесом 10 передаточного вала 9.
Передаточный вал 9 располагается в полой оси 8. С каждого конца передаточного валя имеются зубчатые колеса 10 и 11, входящие в зацепление с зубчатыми колесами ведущего и ведомого валов.
Ведомый вал 12 располагается в центральном канале дистальной, отклоняющейся части инстумента 3 и имеет с одного конца зубчатое колесо 13, входящее в зацепление с зубчатым колесом 11 промежуточного вала 9, и зубчатое колесо 22 с другого конца, входящее в зацепление с зубчатыми колесами 23 и 24 рабочих губок 25 и 26.
Указанные зубчатые колеса могут иметь коническую форму или сочетать коническую и цилиндрическую формы.
Данная конструкция инструмента с поворотным устройством позволяет дистанционно изменять угол отклонения рабочих губок инструмента от основной оси, прочно фиксировать это отклонение и передавать усилия с рукояток на рабочие губки под любым углом, доступным указанному поворотному устройству.
На фиг. 1-5 представлен вариант расположения рукояток в плоскости, перпендикулярной основной оси. Фиг.1 показывает общий вид инструмента, где рукоятка жестко связана с корпусом инструмента 2, а рукоятка 19 жестко связана с вращающимся валом 14. Связь с вращающимся валом может осуществляться и через систему шестерен для уменьшения усилий, прикладываемых к рукояткам (фиг. 4). Вид с торца инструмента представлен на фиг.2, 3 и 4. На фиг.3 вместо рукоятки используется винт с рукоятками 19, а рукоятка 18 выполнена в виде упора для другой руки. Вариант с винтом может быть использован в случаях наличия двух или более независимо друг от друга вращающихся валов, расположенных на одной оси. Винты располагаются последовательно и каждый из них связан с определенным валом (см. фиг.11 и 12).
Передача вращательных движений с ведомого вала 12 на рабочие части 25 и 26 осуществляется через конические зубчатые колеса 22, 23 и 24, расположенные перпендикулярно друг к другу. Вращательное движение может передаваться одновременно на обе губки в противоположные направления (фиг.5) или на одну губку при неподвижности другой.
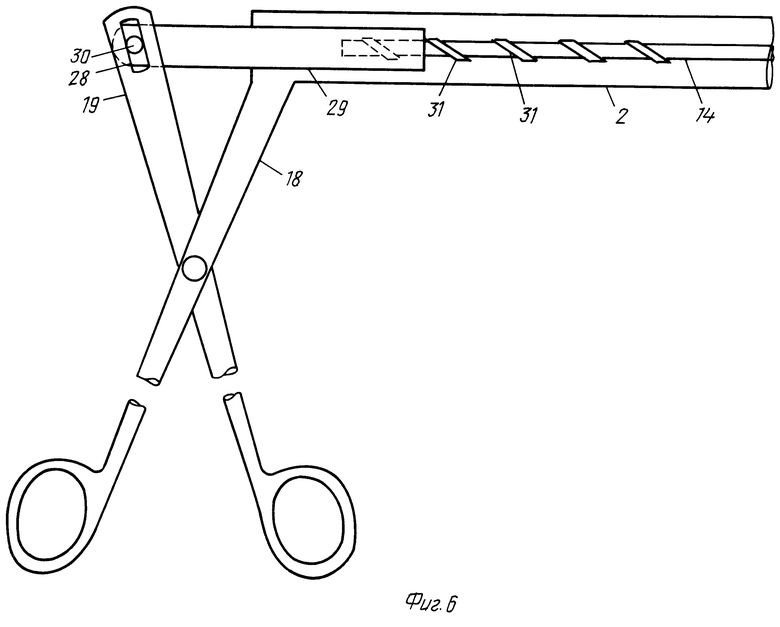
Другой вид расположения рукояток - в плоскости основной оси инструмента представлен на фиг. 2 и 3. На фиг. 2 показана схема винтового зацепления с большим шагом. Неподвижная рукоятка 18 жестко связана с корпусом инструмента. Подвижная рукоятка 19 через шарнир (прорезь в рукоятке 28 и ось 30 цилиндра 29) связана с подвижным цилиндром 29, имеющим внутреннюю винтовую нарезку с большим шагом. В этом цилиндре располагается начальная часть ведущего вала 14 с соответствующей наружной винтовой нарезкой 31. При движении подвижной рукоятки 19 линейно перемещается цилиндр 29, что приводит ведущий вал 14 во вращательное движение (в обе стороны).
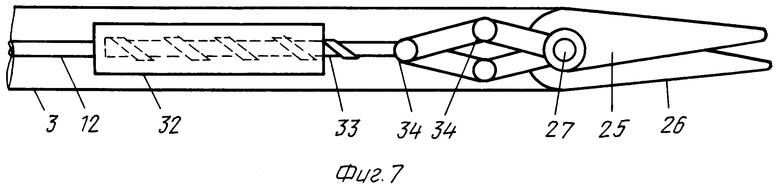
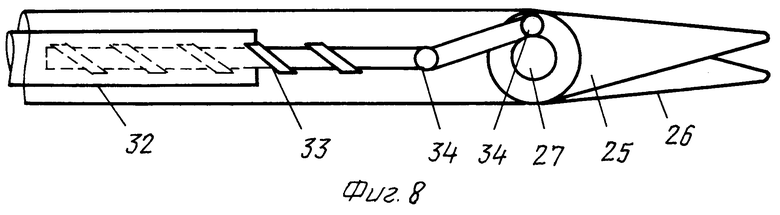
В дистальной, рабочей части инструмента, наоборот, вращательное движение ведомого вала 12 и цилиндра 32 с внутренней винтовой нарезкой с большим шагом преобразуется в поступательное движение конечного штока 33, имеющего соответствующую наружную винтовую нарезку. Перемещение штока 33 через систему показанных на чертеже шарниров 34 заставляет рабочие губки 25 и 26 вращаться на оси 27, раскрываясь и закрываясь. При этом могут перемещаться как обе губки (фиг.7), так и одна губка при неподвижном положении другой (фиг.8).
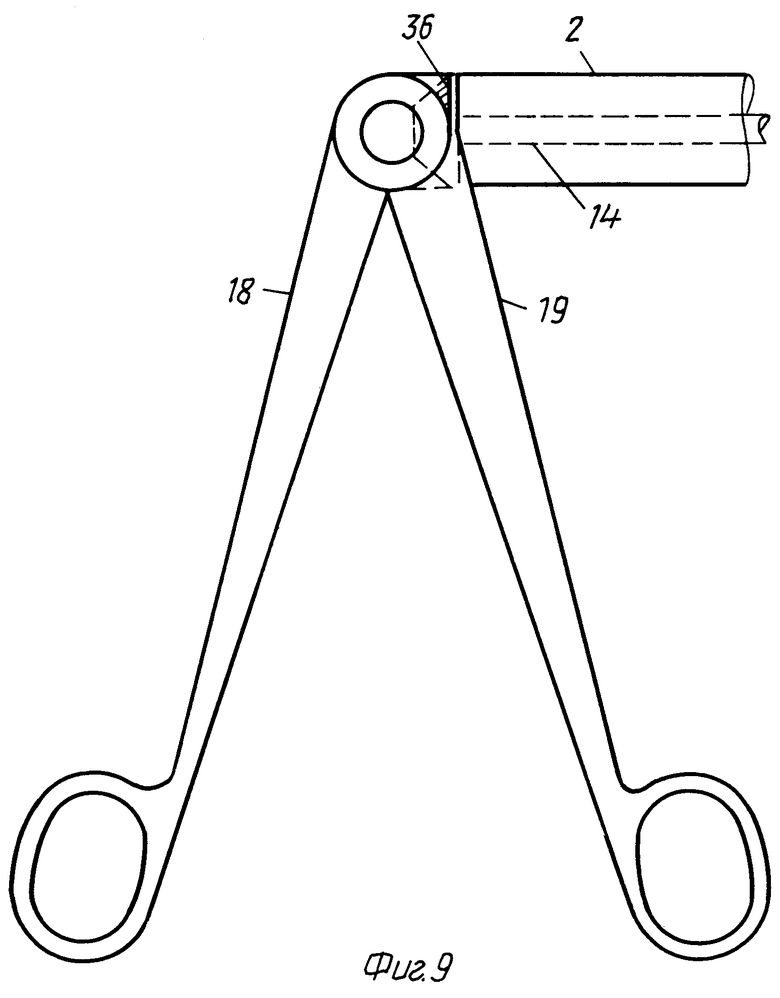
В третьем варианте (фиг. 9 и 10) передача движений на ведущий вал 14 производится через конические зубчатые колеса 35 и 36, расположенные перпендикулярно друг к другу или под другим углом.
Возможны различные комбинации передачи движений как на ведущий, так и на ведомый вал.
Возможность передачи вращательных движений в обе стороны обеспечивает смыкание и раскрытие рабочих губок без применения возвратных пружин, столь усложняющих конструкции инструментов с гибкой тягой.
На фиг.11 и 12 показана схема поворотного устройства с двойным вращающимся валом. Показаны два ведущих вала 14а и 14б (показан пунктиром), расположенных соосно. Каждый из них заканчивается соответствующим зубчатым колесом 15а и 15б.
Имеются также два расположенных соосно промежуточных вала 9а и 9б, имеющих соответствующие концевые зубчатые колеса 10а и 10б, входящие в зацепление с зубчатыми колесами 15а и 15б, и зубчатые колеса 11а и 11б, входящие в зацепление с зубчатыми колесами 13а и 13б ведомых валов 12а и 12б.
Ведомые валы 12а и 12б также расположены соосно и могут раздельно передавать усилия на различные рабочие устройства.
По этому принципу в указанном поворотном устройстве могут быть размещены при необходимости и несколько систем вращающихся валов.
Инструмент с поворотным устройством предназначен для применения в медицине при эндоскопических и миниинвазивных операциях, может быть использован и для других целей. Инструмент включает дистанционно-управляемый поворотный механизм, рукоятки и полый корпус. Полый корпус состоит из шарнирно соединенных частей с расположенными под углом к продольной оси корпуса двумя и более парами торцевых поверхностей сопряжения с полой осью. Полая ось ориентирована перпендикулярно торцевым поверхностям. Поворотный механизм имеет вращающийся вал, размещенный внутри корпуса, и рабочие губки. Вращающийся вал состоит из ведущего вала, промежуточного вала и ведомого вала. Ведущий вал находится в проксимальной к рукояткам части корпуса. Промежуточный вал расположен в полой оси. Ведомый вал установлен в отклоняющейся части инструмента. Валы имеют на своих концах зубчатые колеса, которые находятся в постоянном зацеплении при любом угле поворота. Рабочие губки связаны с ведомым валом через винтовую передачу и систему шарниров или через конические зубчатые колеса. Ведомый вал связан с подвижными рабочими губками или с одной подвижной губкой. В результате конструкция инструмента значительно повышает функциональные возможности других инструментов и аппаратов, сохраняя жесткость в любом необходимом положении, и позволяет манипулировать в труднодоступных полостях. Это дает возможность использовать подобные конструкции в эндоскопических инструментах и аппаратах и в инструментах и аппаратах при миниинвазивных операциях. Подобные инструменты облегчают работу хирурга, ускоряют операцию и уменьшают ее травматичность. 4 з.п.ф-лы, 12 ил.
Инструмент с поворотным устройством, включающий рукоятки, полый корпус, состоящий из шарнирно соединенных частей, с расположенными под углом к продольной оси корпуса двумя или более парами торцевых поверхностей сопряжения, с ориентированной перпендикулярно торцевым поверхностям полой осью и поворотным механизмом с вращающимся валом, размещенным внутри корпуса, и рабочими губками, отличающийся тем, что вращающийся вал состоит из ведущего вала, находящегося в проксимальной к рукояткам части корпуса, промежуточного вала, располагающегося в полой оси инструмента, и ведомого вала, располагающегося в отклоняющейся части инструмента, при этом валы имеют на своих концах зубчатые колеса, находящиеся в постоянном зацеплении друг с другом при любом угле поворота, рабочие губки связаны с ведомым валом через винтовую передачу и систему шарниров или через конические зубчатые колеса, причем ведомый вал связан с двумя подвижными рабочими губками или с одной подвижной губкой, а поворотный механизм выполнен в виде дистанционно-управляемого поворотного механизма.
| ПОВОРОТНОЕ УСТРОЙСТВО | 1993 |
|
RU2098025C1 |
| ПОЛОГОЕ ПОВОРОТНОЕ УСТРОЙСТВО | 1997 |
|
RU2144791C1 |
| US 4641657 А, 10.02.1987 | |||
| SU 1489731 А1, 30.06.1989. | |||

