Предлагаемый танковый баллистический вычислитель (ТБВ) относятся к области вычислительной техники и предназначен для выработки углов прицеливания и бокового упреждения пушки при стрельбе артиллерийскими и управляемыми снарядами, выработки временного интервала установки взрывателя дня артиллерийских снарядов с подрывом на траектории, выработки сигнала "Запрет стрельбы" и времени задержки при стрельбе управляемыми снарядами, выработки зоны разрешения выстрела в системе управления огнем танка (СУОТ).
Известно вычислительное устройство для ведения огня (патент США №3739153, кл. G 06 G 7/80), содержащее микротелефонную трубку, кнопки, реле, шкалы для ввода информации с помощью потенциометров. Счетно-решающее устройство вычисляет упрежденные координаты цели и выдает информацию зависимости угла прицеливания от дальности до цели, которая считывается со шкал потенциометров визуально. Это вычислительное устройство электромеханического типа обладает невысокой точностью и сравнительно низким быстродействием и требует постоянного внимания наводчика при работе.
Известна также баллистическая вычислительная машина (патент Великобритании №1277251 по кл. G 4 G), содержащая первое множительное устройство и вторую группу множительных устройств. Первое множительное устройство умножает сигнал дальности на величину, зависящую от типа снаряда и особых условий, для получения сигнала нормализованной дальности. Вторые множительные устройства умножает сигналы времени полета и максимального вертикального угла возвышения на соответствующие константы для учета отклонений условий стрельбы от нормальных. Баллистическая вычислительная машина аналогового типа обладает высоким быстродействием, но сравнительно низкой точностью, обусловленной погрешностями аналоговых множительных устройств.
Наиболее близким техническим решением к заявляемому является танковый баллистический вычислитель, содержащий сумматоры, коммутаторы, потенциометры ввода поправок на изменение начальной скорости снаряда, расширение канала ствола, температуры воздуха, температуры заряда и атмосферного давления, блок ручного ввода дальности, фильтр нижних частот, первый и второй цифроаналоговые преобразователи, цифровыми входами соединенные с выходами регистра дальности, шифратор, входы которого соединены с выходами первого коммутатора, первым аналоговым входом подключенного к выходу развязывающего усилителя, который соединен с первым входом первого сумматора, с входами потенциометров ввода поправок на изменение температуры заряда, начальной скорости снаряда и расширение канала ствола, счетчик времени, цифровые входы которого связаны с выходами регистра дальности, а управляющие входы - с блоком переключения баллистик и с устройством управления и синхронизации, первый блок аналогового запоминания, выход которого подключен к первому аналоговому выходу второго сумматора, выход первого аналого-цифрового преобразователя связи - с цифровыми входами третьего и четвертого цифроаналоговых преобразователей, причем аналоговый вход третьего цифроаналогового преобразователя соединен с шиной опорного напряжения канала β , а выход - с первым входом третьего сумматора, второй вход которого соединен с аналоговым выходом второго коммутатора, первый вход четвертого сумматора связан с выходом третьего коммутатора, аналоговый вход которого подключен к шине сигнала ветра, аналоговый вход четвертого цифроаналогового преобразователя подключен к шине сигнала крена, первый вход пятого сумматора соединен с первым выходом четвертого коммутатора, аналоговый вход которого связан с шиной опорного напряжения канала α , управляющие входы первого, второго и третьего коммутаторов подключены к блоку переключения баллистик, управляющий вход регистра дальности соединен с первым, а танковый вход со вторым выходом второго аналого-цифрового преобразователя, тактовый и управляющий входы которого связаны с устройством управления и синхронизации, первый аналоговый вход - с шиной сигнала скорости танка, второй аналоговый вход - с шиной сигнала курсового угла, аналоговый вход первого коммутатора связан с выходом мультиплексора, управляющий вход которого подключен к устройству управления и синхронизации, первый аналоговый вход - к шине опорного напряжения канала α , второй аналоговый вход - к шине сигнала крена, выход шифратора соединен с аналоговым входом блока прерывания, управляющий вход которого связан с устройством управления и синхронизации, а выход - с аналоговым входом первого цифроаналогового преобразователя и входом блока ручного ввода дальности, выход которого соединен с первым входом развязывающего усилителя, первый выход первого цифроаналогового преобразователя подключен ко второму входу развязывающего усилителя, а второй выход - к аналоговому входу первого переключателя режима, управляющий вход которого связан с устройством управления и синхронизации, а выход - со вторым входом развязывающего усилителя, выход которого соединен с аналоговым входом второго цифроаналогового преобразователя, управляющий вход которого подключен к пятому коммутатору, а выход - к входам потенциометров ввода поправок на изменение температуры воздуха и атмосферного давления, выходы которых соединены со вторым и третьим входами первого сумматора, четвертый вход которого связан с выходом шестого сумматора, аналоговыми входами подключенного к выходам потенциометров ввода поправок на изменение температуры заряда, расширение канала отвода и изменение начальной скорости снаряда, а управляющим входом - ко второму переключателю режима, связанному с устройством управления и синхронизации, выход первого сумматора соединен с аналоговым входом счетчика времени, с аналоговым входом фильтра импульсных помех, управляющий вход которого связан с блоком управления и синхронизации, а выход - со вторым входом пятого сумматора, третий вход которого подключен к выходу четвертого цифроаналогового преобразователя, четвертый вход - к шине сигнала вертикального наведения, пятый вход - ко второму выходу четвертого коммутатора, а шестой вход - к выходу шестого коммутатора, аналоговыми входами соединенного с выходами элементов ввода индивидуальных углов вылета снарядов в вертикальной плоскости, подключенных к шине опорного напряжения канала α , выход первого сумматора подключен к аналоговому входу седьмого коммутатора, два выхода которого связаны с входами первого и второго блоков аналогового запоминания, выход второго сумматора соединен с аналоговым входом аналого-цифрового преобразователя, цифровые входы которого подключены к устройству управления и синхронизации, третий вход третьего сумматора связан с выходом восьмого коммутатора, аналоговыми входами соединенного с выходами элементов ввода индивидуальных углов вылета снарядов в горизонтальной плоскости, подключенных к шине опорного напряжения канала β , управляющие входы третьего, пятого, шестого и восьмого коммутаторов и второго сумматора подключены к блоку переключения баллистик, а управляющие входы седьмого коммутатора - к устройству управления и синхронизации, связанному входом с шиной опорного напряжения канала α , аналоговые входы первого порогового блока, второго, девятого и десятого коммутаторов подключены к шине сигнала угловой скорости цели, второй аналоговый вход порогового блока соединен с шиной стабилизированного напряжения, выход порогового блока подключен к управляющим входам девятого и десятого коммутаторов, выходами подключенных к первому входу седьмого сумматора и второму входу четвертого сумматора соответственно, выход четвертого сумматора через последовательно соединенные третий блок аналогового запоминания и фильтр нижних частот соединен со вторым входом седьмого сумматора, выход которого подключен к третьему аналоговому входу мультиплексора, выход второго блока аналогового запоминания соединен со вторым аналоговый входом второго сумматора. Вычисления проводятся в аналого-цифровой форме. Аппроксимация баллистических функций осуществляется дробно-линейными функциями вида 
Данный вычислитель долгое время считался лучшим образцом, однако в процессе эксплуатации выявились следующие недостатки.
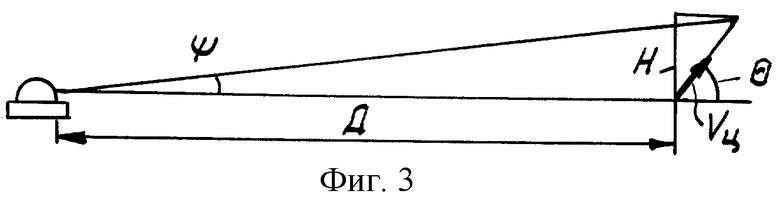
1. Отсутствует учет относительной угловой скорости цели в вертикальной плоскости, что приводит к резкому снижению эффективности при стрельбе по движущимся целям в условиях горной местности и практически к невозможности стрельбы по низколетящим целям (типа вертолет), так как не вырабатывается угол упреждения в вертикальной плоскости. При этом величина ошибки прицеливания численно равна углу упреждения и может быть определена из чертежа (см. фиг.3), где Д - дальность до цели; Vц - скорость цели; Н - вертикальное перемещение цели; ψ - угловое перемещение цели; θ - угол между направлением движения цели и горизонтальной плоскостью.
Очевидно, что для Д>>Н справедливо
 ,
,
где t - текущее время.
Тогда относительная угловая скорость цели в вертикальной плоскости определяется как
и величина угла упреждения при полетном времени tп должна быть
Например, если Д=2000 м (при этом tп=2,76 с),
Vц=5 м/с, Θ =10° ошибка прицеливания составит

что практически приводит к промахам при стрельбе.
2. Отсутствует учет переносной скорости снаряда при движении танка. Относительное изменение начальной скорости вылета снаряда составляет
где VT - скорость танка;
q - курсовой угол;
Vo - начальная скорость вылета снаряда.
При Д=2000 м VT =20 м/с.
Величина ошибки (рассчитанная по алгоритму прототипа) составляет 1,3'.
3. Отсутствует учет угла между пушкой и корпусом танка, что приводит к возникновению ряда погрешностей:
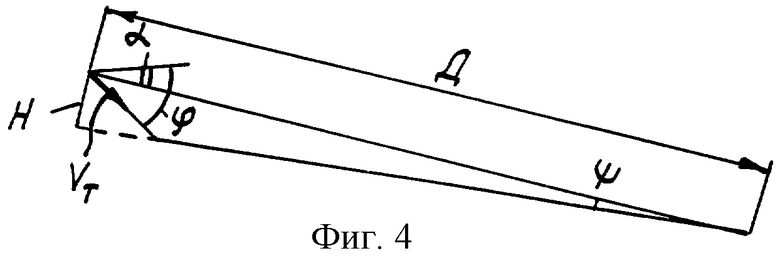
а) при движении танка может возникать относительная угловая скорость линии визирования в том случае, если линия визирования не совпадает с направлением скорости танка (например, танк движется по склону). Так как относительная угловая скорость цели определяется как скорость движения линии визирования при слежении за целью, это приводит к появлению фиктивной угловой скорости цели и, в свою очередь, к ошибке прицеливания. Величина данной ошибки может быть определена из чертежа (см. фиг.4), где Д - дальность до цели; VT - скорость танка; H - вертикальное перемещение танка; ψ - угловое перемещение линии визирования; α - угол прицеливания (между пушкой и линией визирования); ϕ - угол между пушкой и корпусом танка.
При Д&γτ; &γτ; Н
где ω вф - фиктивная относительная угловая скорость цели;
tп - полетное время

При Д=2000 м, VT=5 м/с и углом между линией визирования и корпусом танка в 10° ошибка составляет 4,1;
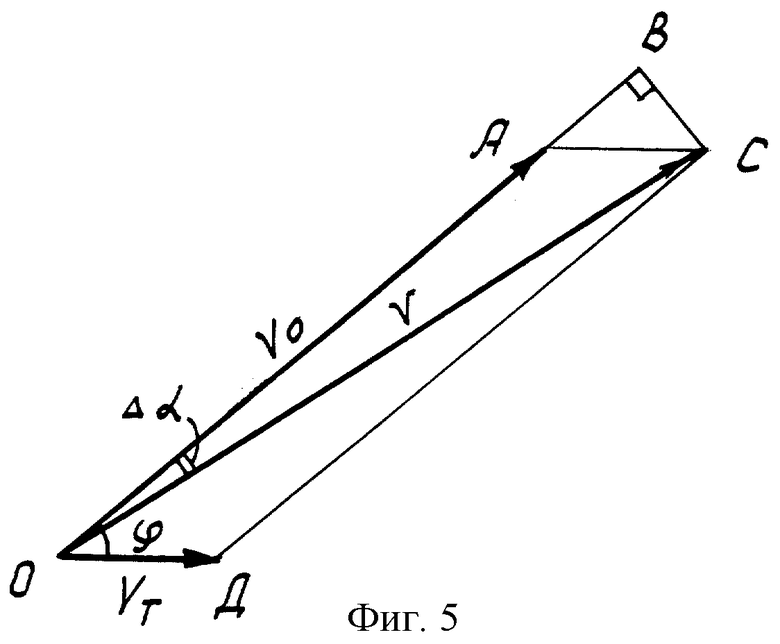
б) при движении танка необходимо учитывать изменение угла прицеливания из-за векторного сложения скоростей снаряда и танка. При этом возникает изменение направления скорости снаряда, приводящее к ошибке угла прицеливания. Чтобы избежать ее, необходимо ввести поправку в угол прицеливания. Величина ошибки может быть определена из чертежа (см. фиг.5), где VT - скорость танка (вектор  ); Vo - начальная скорость вылета снаряда (вектор
); Vo - начальная скорость вылета снаряда (вектор  ); V - итоговая скорость вылета снаряда (вектор
); V - итоговая скорость вылета снаряда (вектор  ); ϕ - угол между корпусом танка и пушкой в вертикальной плоскости.
); ϕ - угол между корпусом танка и пушкой в вертикальной плоскости.
Величина, на которую изменяется угол прицеливания, может быть определена как

При Vo>>VT и для малых значений y справедливо

При VT=10 м/с, Vo=800 м/с, ϕ =5° ошибка составляет 3,75'.
4. Отсутствует учет собственной скорости движения цели, что приводит к ошибкам при стрельбе по движущейся цеди.
Величину ошибки можно ориентировочно оценить, считая линейной зависимость угла прицеливания от дальности при малых отклонениях в окрестности выбранной точки, тогда
Δ α ≥ KдVц(t+tп),
где Кд - коэффициент линеаризации;
Vц - скорость цели;
t - время между измерением дальности до цели и производством выстрела;
tп - полетное время.
Например, при дальности до цели 2000 м (Kд ∀ 0,043 угл.мин/м, tп =2,76 с) t=2 с, Vц=10 м/с ошибка составляет 2,1'.
5. Отсутствует учет изменения угла прицеливания при стрельба с наличием бокового крена. Это изменение может быть выражено функцией:
α =α 1cos γ ,
где α - угол прицеливания с учетом бокового крена;
α 1 - угол прицеливания, задаваемый таблицами стрельбы с учетом отклонений условий стрельбы от нормальных;
γ - угол бокового крена танка.
Из приведенной зависимости следует, что наличие бокового крена в 10° приводит к ошибке при вычислении угла прицеливания в 1,5%.
6. Часть выстрелов управляемыми реактивными снарядами производится, когда цель находится заведомо вне зоны поражения, зависящей от дальности до цели и ее скорости. Отсутствие в ТБВ расчетов зоны встреливания приводит к бессмысленной потере управляемых снарядов и снижению эффективности управляемого вооружения.
7. В вычислителе отсутствует устройство расчета временных интервалов для установки взрывателя в артиллерийских снарядах с подрывом на траектории, в результате чего для определения полетного времени и соответственно времени установки взрывателя было необходимо устройство установки временных интервалов, использующее те же самые входные данные: дальность до цели, атмосферное давление, температуру воздуха и заряда, изменение начальной скорости снаряда, расширение канала ствола.
Целью настоящего изобретения является повышение эффективности стрельбы за счет увеличения точности вычислений. Эта цель достигается тем, что в танковый баллистический вычислитель, содержащий сумматоры, коммутаторы, потенциометры ввода поправок на изменение начальной скорости снаряда, расширение канала ствола, температуры воздуха, температуры заряда и атмосферного давления, блок ручного ввода дальности, фильтры нижних частот, первый и второй цифроаналоговые преобразователи, аналоговые входы которых соединены соответственно с шинами опорных напряжений каналов вертикального (α ) и горизонтального (β ) наведения, управляющие входы первого коммутатора соединены с выходами блока переключения баллистик, а аналоговые входы соединены с выходами блоков ввода индивидуальных углов вылета снаряда в вертикальной и горизонтальной плоскостях, регистр дальности, на входы которого наступает код дальности, аналого-цифровой преобразователь, вход запуска которого соединен с первым выходом устройства управления и синхронизации, первый вход первого сумматора соединен с датчиком угла вертикального наведения, а второй вход - с выходом первого цифроаналогового преобразователя, выход первого сумматора является первым выходом ТБВ - каналом вертикального наведения, первый вход второго сумматора соединен с датчиком угла горизонтального наведения, а второй вход - с выходом второго цифроаналогового преобразователя, выход второго сумматора является вторым выходом ТБВ - каналом горизонтального наведения, блоки аналогового запоминания, развязывающий усилитель, первый управляемый фильтр нижних частот, первый вход которого соединен с виной датчика относительной угловой скорости цели в горизонтальной плоскости, второй вход - с шиной стабилизированного напряжения, первый и второй компараторы
Введены второй управляемый фильтр нижних частот, первый вход которого соединен с шиной датчика относительной угловой скорости цели в вертикальной плоскости, а второй вход - с шиной стабилизированного напряжения, второй фильтр нижних частот, вход которого соединен с шиной сигнала угла положения пушки относительно корпуса танка в вертикальной плоскости, цифровое вычислительное устройство, причем двунаправленная шина данных соединяет вычислительное устройство со входами первого и второго регистров, выходы которых соединены со входами первого и второго цифроаналоговых преобразователей соответственно, входами первого согласующего устройства, выходы которого: сигнал о времени задержки для управляемого снаряда, сигнал установки взрывателя для снарядов с подрывом на траектории, сигнал запрета стрельбы являются соответственно третьим, четвертым и пятым выходом ТБВ, выходами регистра дальности, блока переключения баллистик, таймера, второго согласующего устройства, входы которого соединены с сигналами записи и сброса дальности, ручного или автоматического ввода дальности, схода управляемого снаряда режима стрельбы с превышением, запроса на установку взрывателя для снаряда с подрывом на траектории, шина данных соединена также с выходами коммутатора данных, со входами которого соединены информационные выходы аналого-цифрового преобразователя и двунаправленные входы/выходы буферного оперативного запоминавшего устройства, выходы шины адреса вычислительного устройства соединены со входами селектора адреса, выходы которого подключены к управляющим входам блока переключения баллистик, регистра дальности, первого и второго согласующих устройств, таймера, первого и второго регистров, коммутатора данных, буферного оперативного запоминающего устройства, коммутатора адреса, первые входы которого соединены с шиной адреса вычислительного устройства, а вторые входы - с шиной адреса устройства управления и синхронизации, к которой подсоединены также управляющие входы второго и третьего коммутаторов, к аналоговым входам второго коммутатора подсоединены выход первого коммутатора, выходы потенциометров ручного ввода поправок на изменение начальной скорости полета снаряда, расширение канала ствола, температуры воздуха, температуры заряда, атмосферного давления, блока ручного ввода дальности, шина сигнала скорости танка, выходы первого блока аналогового запоминания, на информационный вход которого поступает сигнал с датчика курсового угла, выход второго коммутатора соединен со входом третьего коммутатора, к аналоговым входам которого также подсоединены выходы второго - десятого блоков аналогового запоминания, а выход третьего коммутатора через развязывавший усилитель связан о аналоговым входом аналого-цифрового преобразователя, выход "Конец преобразователя" которого соединен с первым входом устройства управления в синхронизации, второй вход которого через схему выделения фронта связан с шиной опорного напряжения канала вертикального наведения, третий вход - с шиной сигнала тактовой частоты, второй выход соединен со входом записи буферного оперативного запоминающего устройства, выходная управляющая шина устройства управления и синхронизации соединена с управляющими входами первого - десятого блоков аналогового запоминания, вход второго блока аналогового запоминания через первый фильтр нижних частот связан с датчиком сигнала бокового ветра, вход третьего блока аналогового запоминания соединен с выходом второго фильтра нижних частот, вход четвертого блока аналогового запоминания соединен с датчиком сигнала бокового крена танка, вход пятого и вход шестого блоков аналогового запоминания соединены с выходами первого и второго управляемых фильтров нижних частот соответственно, вход седьмого блока аналогового запоминания соединен с выходом первого сумматора, третий вход которого связан с сигналом электрической выверки прицела в вертикальной плоскости, вход восьмого блока аналогового запоминания соединен с шиной сигнала датчика угла вертикального наведения, вход девятого блока аналогового запоминания соединен с шиной сигнала датчика угла горизонтального наведения, вход десятого блока аналогового запоминания соединен с выходом второго сумматора, третий вход которого связан с сигналом электрической выверки прицела в горизонтальной плоскости, выходы седьмого блока аналогового запоминания дополнительно соединены с положительным и отрицательным входами третьего сумматора, выход которого соединен с первым входом первого компаратора, второй вход которого связан с потенциометром регулировки ширины зоны разрешения в вертикальной плоскости, а выход - с первым входом схемы совпадения, выходы десятого блока аналогового запоминания дополнительно соединены с положительным и отрицательным входами четвертого сумматора, выход которого соединен с первым входом второго компаратора, второй вход которого связан с потенциометром регулировки ширины зоны разрешения в горизонтальной плоскости, а выход - со вторым входом схемы совпадения, третий вход которой связан с сигналом "Питание схемы совпадения", а выход схемы совпадения является шестым выходом ТБВ - зона разрешения выстрела.
Кроме того, устройство управления и синхронизации содержит счетчик периода, вход обнуления которого является вторым входом устройства и соединен с выходом схемы выделения фронта, третий вход устройства - тактовый вход счетчика периода соединен с шиной сигнала тактовой частоты, а выходы счетчика периода - со входами постоянного запоминающего устройства, выходы которого соединены со входами дешифратора, выходы которого являются управляющей шиной устройства управления и синхронизации, шина сигнала тактовой частоты соединена также с тактовым входом сдвигового регистра, информационный вход которого является первым входом устройства и соединен с выходом "Конец преобразования" АЦП, первый разряд сдвигового регистра является вторым выходом устройства и соединен с входом записи буферного запоминающего устройства, второй разряд соединен с тактовым входом счетчика адреса, третий разряд, который является первым выходом устройства, соединен с входом запуска аналого-цифрового преобразователя, выходы счетчика адреса являются адресной шиной устройства управления и синхронизации.
Кроме того, блок аналогового запоминания состоит из первого и второго аналоговых ключей, первого и второго запоминающих конденсаторов, первого в второго развязывающих усилителей, причем вход блока аналогового запоминания соединен с аналоговыми входами первого и второго ключей, к управляющим входом которых подсоединены соответственно первый и второй управляющие входы блока аналогового запоминания, выходы первого и второго аналоговых ключей соединены соответственно со входами первого и второго развязывающих усилителей и с первыми выводами первого и второго запоминающих конденсаторов, вторые выводы которых соединены с шиной "Общий", выходы первого и второго развязывающих усилителей являются соответственно первым и вторым выходами блока аналогового запоминания.
Применение цифровых вычислительных устройств на базе микропроцессоров широко известно в народном хозяйстве /Горячев А.В., Шишкевич А.А. Информационно-управляющие вычислительные системы. - М.: Высшая школа, 1984/. Однако применение вычислительного устройства на базе микропроцессора в составе танкового баллистического вычислителя позволило при незначительных дополнительных аппаратурных затратах ввести в структуру ТБВ шины сигналов угла положения пушки относительно корпуса танка в вертикальной плоскости и относительной угловой скорости цели в вертикальной плоскости и учесть данные сигналы в алгоритме работы ТБВ. В известных технических решениях для учета сигнала относительной угловой скорости цели по вертикали понадобился бы еще один режим в примененной там схеме переключения режима для вычисления угла упреждения в вертикальной плоскости
β ВО=tпо·ω B,
где β BO - угол упреждения в вертикальной плоскости;
tпo - полетное время;
ω B - относительная угловая скорость цели в вертикальной плоскости.
Далее необходимо было бы осуществить вычисление на выходе сумматора 17 функции
где обозначения соответствуют принятым в описании прототипа,
и далее осуществить суммирование полученной величины с углом прицеливания. Это привело бы к существенному усложнению устройства управления и синхронизации прототипа и структуры в целом.
Вычисление поправок на учет переносной скорости было бы практически нереализуемо за счет большого количества операций умножения и деления и привело бы к снижению надежности за счет переусложнения схемы.
Применение вычислительного устройства на основе микропроцессора позволило дополнительно учесть изменение угла прицеливания при наличии бокового крена, при этом не понадобился и дополнительный датчик, выдающий сигнал cоs γ , а вычисление производится по формуле cоs γ =1- sin2γ, (сигнал sinγ поступает с датчика бокового крена). При этом ошибка вычисления cos γ при боковом крене до 15° не превышает 0,06%.
sin2γ, (сигнал sinγ поступает с датчика бокового крена). При этом ошибка вычисления cos γ при боковом крене до 15° не превышает 0,06%.
Также стал возможным учет собственной скорости движения цели за счет повторного измерения дальности до цели, при этом скорость цели определяется в виде следующей функции:
где Д1 и Д2 - соответственно первая и вторая дальности до цели, измеренные дальномером; tД1 и tД2 - времена, соответствующие измерением дальности, считываемые с таймера; VT - скорость танка; cos q - косинус курсового угла.
Кроме того, стал возможен расчет зоны встреливания для управляемых снарядов и расчет времени для установки взрывателя в снарядах с подрывом на траектории. При этом используются те же данные, что и для решения основной баллистической задачи, и аппаратурные затраты сводятся только к введению шины сигнала "Запрос" для установки взрывателя в снарядах с подрывом на траектории и выходных формирователей в согласующем устройстве, служащих для выдачи двух импульсов для установки взрывателя и выдачи сигнала о том, что цель находится вне зоны вcтреливания. Дополнительно введение микропроцессора позволило увеличить количество типов используемых боеприпасов только за счет увеличения положений переключателей блока переключения баллистик и наращивания объема ПЗУ баллистических коэффициентов. При аналого-цифровой структуре прототипа увеличение числа типов баллистик привело бы к существенным аппаратурным затратам, так как баллистические коэффициенты реализовывались весовыми резисторами и коммутаторами, управляемыми с блока переключения баллистик.
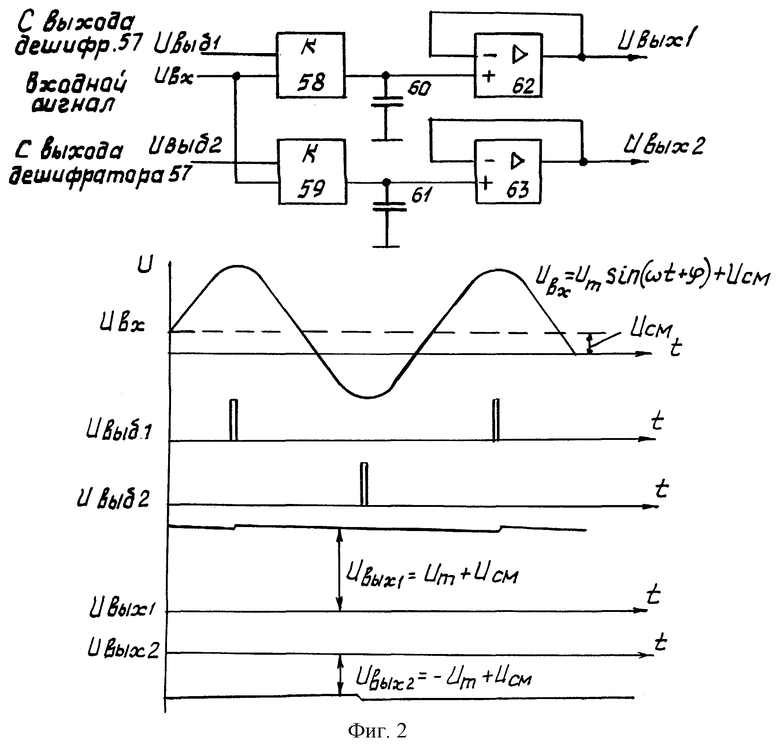
Выделение амплитуды входных сигналов переменного напряжения частотой 400 Гц для последующего преобразования осуществляется посредством блока аналогового запоминания (БАЗ). Известны устройства выборки и хранения (Гнатек Ю.Р. Справочник по цифроаналоговым и аналого-цифровым преобразователям. Пер. с англ. - М.: Радио и связь, 1982), содержащие аналоговый ключ, запоминающий конденсатор и развязывающий усилитель. Однако при этом запоминаемое напряжение может иметь погрешность за счет разности напряжений на общих проводах датчика и вычислителя и (или) постоянного смещения на входных масштабирующих усилителях. Таким образом для входного сигнала
 Uвх=Umsin ω t+ω см вх,
Uвх=Umsin ω t+ω см вх,
где Um - амплитуда сигнала;
Uсм вх - постоянное смещение сигнала.
Напряжение, запоминаемое на выходе устройства выборки и хранения, будет иметь вид
Uвых=Um+Uсм вх.
В предлагаемом блоке аналогового запоминания имеются две пары ключей, емкостей и развязывающих усилителей, причем сигналы выборки подаются в моменты времени, соответствующие максимальному значению сигнала на первый ключ и минимальному - на второй ключ, то есть сдвинутые относительно друг друга на время, соответствующее полупериоду сигнала. Тогда запоминаемое напряжение на первом выходе БАЗ будет Uвых 1=Um+Uсм вх и на втором выходе БАЗ Uвых 2=Um+Uсм вх. При последующем аналого-цифровом преобразовании им будут соответствовать коды:
N1 ≡ Uвых 1+Uсм АЦП=Um+Uсм вх+UсмАЦП;
N2 ≡ Uвых 2+Uсм АЦП=-Um+Uсм вх+UсмАЦП,
где Uсм АЦП - собственное постоянное смещение АЦП.
Полученные коды обрабатываются в вычислительном устройстве по алгоритму 
Таким образом, исключаются погрешности, возникающие как в результате смещения сигналов с датчиков и входных устройств, так и смещения в тракте аналого-цифрового преобразования. Кроме этого, вследствие усреднения результатов двух преобразований происходит увеличение точности.
Таким образом, в предлагаемом устройстве известные признаки, оригинальные и известные схемотехнические решения придают новые свойства танковому баллистическому вычислителю, а именно позволяют повысить эффективность стрельбы из танка за счет увеличения точности вычислений, в том числе управляемыми снарядами, позволяют вести стрельбу снарядами с подрывом на траектории. Кроме этого, появилась возможность увеличения количества типов используемых боеприпасов. Таким образом, заявляемое техническое решение обладает существенными отличиями.
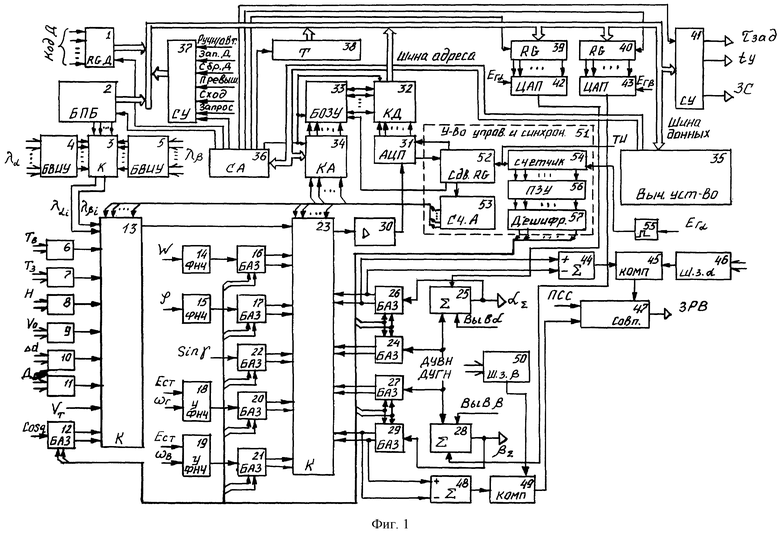
Сущность заявляемого технического решения иллюстрируется чертежами, на которых представлены блок-схема ТБВ (фиг.1), функциональная схема блока аналогового запоминания и временные диаграммы ее работы (фиг.2).
Танковый баллистический вычислитель содержит регистр дальности 1, блок переключения баллистик 2, выходы которого подключены к управляющим входам коммутатора 3, блоки ввода индивидуальных углов вылета снарядов в вертикальной - 4 и горизонтальной - 5 плоскостях, выходы которых подключены ко входам коммутатора 3, потенциометры ввода поправок на изменение температуры воздуха - 6, температуры заряда - 7, атмосферного давления - 8, начальной скорости полета снаряда - 9, расширение канала ствола - 10, блок ручного ввода дальности - 11, блок аналогового запоминания курсового угла - 12, на вход которого поступает сигнал курсового угла (cos q), причем выходы коммутатора 3, потенциометров 6... 10, блоков 11, 12 и шина сигнала собственной скорости танка подключены ко входам коммутатора 13, шины сигналов бокового ветра (W) и датчика угла положения пушки относительно корпуса танка (ϕ ) через фильтры нижних частот 14 и 15 соединены со входами блоков аналогового запоминания 16 и 17 соответственно, шины сигналов относительной угловой скорости цели в горизонтальной (ωг) и вертикальной (ωB) плоскостях через управляемые фильтры нижних частот 18 и 19, вторые входы которых соединены с шиной опорного напряжения, подсоединены ко входам блоков аналогового запоминания 20 и 21 соответственно, шина сигнала бокового крена танка соединена со входом блока аналогового запоминания 22, выходы коммутатора 15 и блоков аналогового запоминания 16, 17, 20, 21, 22 соединены с аналоговыми входами коммутатора 25, шина сигнала датчика утла вертикального наведения (ДУВН) соединена с блоком аналогового запоминания 24 и первым входом сумматора 25, второй вход которого соединен с сигналом электрической выверки прицела в вертикальной плоскости (Выв α ), а выход является выходом ТБВ (αΣ ) и одновременно соединен со входом блока аналогового запоминания 26, шина сигнала датчика угла горизонтального наведения (ДУГН) соединена с блоком аналогового запоминания 27 и первым входом сумматора 28, второй вход которого соединен с сигналом электрической выверки прицела в горизонтальной плоскости (Выв β ), а выход является выходом ТБВ (βΣ ) и одновременно соединен со входом блока аналогового запоминания 29, выходы блоков аналогового запоминания 24, 26, 27, 29 соединены с аналоговыми входами коммутатора 23, выход которого через развязывающий усилитель 30 соединен с аналоговым входом АЦП 31, цифровые выходы которого соединены со входами коммутатора данных 32, двунаправленные входы-выходы которого соединены со входами-выходами буферного оперативного запоминающего устройства (БОЗУ) 33, адресные входы которого соединены с выходами коммутатора адреса 34, со входами которого соединена шина адреса цифрового вычислительного устройства 35. В качестве цифрового вычислительного устройства может быть использован микропроцессор с раздельными шинами адреса и данных. Структура такого микропроцессора и организация обмена его с внешними устройствами подробно описаны в литературе /Горячев А.В., Шишкевич А.А. Информационно-управляющие вычислительные системы. - М.: Высшая школа, 1984, с.104-118). Шина адреса вычислительного устройства также соединена со входами селектора адреса 36, выходы которого соединены с управляющими входами регистра дальности 1, блока переключения баллистик 2, коммутаторов адреса-34 и данных - 32, БОЗУ 33, согласующего устройства 37, таймера 38, регистров 39 и 40, согласующего устройства 41. На входы согласующего устройства 37 поступают сигналы записи (Зап. Д) и сброса (сбр. Д) дальности, ручного или автоматического ввода дальности (Ручн/Авт), схода управляемого снаряда (Сход), режима стрельбы с превышением (Превыш), запроса на установку взрывателя для снаряда с подрывом на траектории (Запрос), выходы регистра дальности 1, блока переключения баллистик 2, коммутатора данных 32, согласующего устройства 37 и таймера 38 соединены с шиной данных вычислительного устройства 35, к шине данных также подсоединены входы регистров 39 и 40, согласующего устройства 41, выходы регистра 39 соединены с цифровыми входами ЦАП 42, аналоговый вход которого соединен с шиной опорного напряжения канала вертикального наведения (ЕГα ), а выход - с третьим входом сумматора 25, выходы регистра 40 соединены с цифровыми входами ЦАП 43, аналоговый вход которого соединен с шиной канала горизонтального наведения (ЕГβ ), а выход - с третьим входом сумматора 28, выходы согласующего устройства 41 являются выходными сигналами ТБВ о формировании времени задержки (τзад) и запрета стрельбы (ЗС) для управляемого снаряда и формировании времени установки взрывателя для снаряда с подрывом на траектории (ty), выходы блока аналогового запоминания 26 также соединены с положительным и отрицательным входами сумматора 44, выход которого соединен с первым входом компаратора 45, второй вход которого соединен с потенциометром регулировки ширины зоны разрешения в вертикальной плоскости 46, а выход - со входом схемы совпадения 47, выходы блока аналогового запоминания 29 также соединены с положительным и отрицательным входами сумматора 48, выход которого соединен с первым входом компаратора 49, второй вход которого соединен с потенциометром регулировки ширины зоны разрешения в горизонтальной плоскости 50, а выход - со вторым входом схемы совпадения 47, третий вход которой соединен с сигналом питания схемы совпадения (ПСС), а выход является выходом ТБВ - сигналом о наличии зоны разрешения выстрела (ЗPB).
Устройство управления и синхронизации 51 содержат сдвиговый регистр 52, первый вход которого подключен к шине тактовой частоты, второй вход соединен с выходом "Конец преобразования" АЦП 31, первый выход соединен с входом записи БОЗУ 33, третий выход соединен с входом запуска АЦП 31, а второй выход - со входом счетчика адреса 53, выходы которого являются адресной шиной устройства управления и синхронизации и соединены с адресными входами аналоговых коммутаторов 13 и 23 и коммутатора адреса 34, шина тактовой частоты соединена также со счетным входом счетчика периода 54, ко входу обнуления которого через схему формирования фронта 55 подсоединена шина опорного напряжения канала вертикального наведения (ЕГα ), a выходы соединены со входами постоянного запоминающего устройства (ПЗУ) 56, выходы которого через дешифратор 57 соединены со входами блоков аналогового запоминания 12, 16, 17, 20... 22, 24, 26, 27, 29.
Блоки аналогового запоминания 12, 16, 17, 20... 22, 24, 26, 27, 29 (фиг.2) содержат первый 58 и второй 59 аналоговые ключи, аналоговые входы которых являются входом БАЗ, а управляющие входы соединены с выходами дешифратора 54, выходы ключей 58 и 59 соединены соответственно с первыми выводами запоминающих конденсаторов 60 и 61, вторые выводы которых соединены с шиной "Общий" и через развязывающие усилители 62 и 63 соответственно являются первым и вторым выходами БАЗ.
Танковый баллистический вычислитель работает следующим образом. Вычислительное устройство 35 через селектор адреса 36 производит циклический опрос согласующего устройства 37. Согласующее устройство 37 состоит из рада триггеров и шинного формирователя с третьим состоянием. Ко входам триггеров подключены внешние управляющие сигналы, определяющие режим работы ТБВ. При опросе содержимое триггеров считывается в вычислительное устройство 35, после чего триггеры обнуляются. При поступлении сигнала "ЗапД", свидетельствующего об измерении дальности, вычислительное устройство 35 производит через селектор адреса 36 обращение к регистру дальности 1 и блоку переключения баллистик 2 и считывает информацию о коде дальности и о типе баллистик. Выходы регистра дальности 1 и блока переключателя баллистик 2, подключенные к шине данных, имеют третье состояние. После этого производится считывание информации из БОЗУ 39. При этом по сигналам с селектора адреса 36 коммутатор адреса 34 подключает шину адреса вычислительного устройства 35 к адресным входам БОЗУ 33, БОЗУ 33 устанавливается в режим "Чтение", коммутатор данных 32 подключает выходы БОЗУ 33 к шине данных. Считывание информации производится изменением младших разрядов шины адреса при сохранении старших разрядов адреса, определяющих режим чтения из БОЗУ.
При выборе штатного типа баллистики производится решение баллистической задачи по следующему алгоритму:










Vц - скорость цели, определяемая по двум измерениям дальности;
Д1 и Д2 - соответственно первая и вторая дальности до цеди, измеренные дальномером;
tД1 и tД2 - времена, соответствующие измерениям дальности, в случае одного измерения дальности принимается tД=tД2, Vц=0;
VT - скорость танка;
q - курсовой угол танка (с датчика поступает сигнал, пропорциональный косинусу курсового угла);
 - относительная скорость сближения цели и танка;
- относительная скорость сближения цели и танка;
Д - текущая дальность до цели;
t - текущее время на момент очередного решения задачи;
Δ V - изменение начальной скорости вылета снаряда за счет изменения начальной скорости полета снаряда в зависимости от партии (ΔVo) и скорости танка;
Voj - начальная скорость вылета снаряда; индекс j здесь и далее обозначает зависимость параметра j-го типа снаряда;
tоп - полетное время, задаваемое таблицами стрельбы при нормальных условиях;
B4j, B3j, B2j, B1j, B0j - коэффициенты аппроксимации;
tп - полетное время при отклонениях условий стрельбы от нормальных;
ΔT3, ΔТB, ΔH - отклонения температуры заряда, температуры воздуха и атмосферного давления нормальных соответственно;
Δd - расширение канала ствола;
K1j, K2j, K3j, K4j, K5j - коэффициенты, учитывающие влияние соответствующего параметра;
Ду - упрежденная дальность до цели;
αо - угол прицеливания, задаваемый таблицами стрельбы при нормальных условиях;
А4j, А3j, А2j, А1j, А0j, - коэффициенты аппроксимации;
γ - боковой крен танка (с датчика поступает сигнал, пропорциональный синусу бокового крена);
α 1 - угол прицеливания при отклонениях условий стрельбы от нормальных;
β - угол бокового упреждения;
ω г - относительная угловая скорость цели по горизонту;
W - скорость ветра в боковом направлении;
KWj - коэффициент учитывающий влияние бокового ветра;
λ αj, λ βj - индивидуальные углы вылета снаряда в вертикальной и горизонтальной плоскостях соответственно;
α - угол прицеливания с учетом бокового крена, бокового ветра, угла упреждениями по вертикали, переносной скорости и т.д.;
ωB - относительная угловая скорость цели по вертикали;
ϕ - угол между корпусом танка и пушкой в вертикальной плоскости.
Аппроксимация табличных зависимостей tоп=fτ ,j(Д), α о/=fα ,j(Д) осуществляется полиномами четвертой степени, достаточно точно описывающими баллистические кривые.
Коэффициенты В4j, В3j, В2j, В1j, В0j А4j, А3j, А2j, А1j, А0j,КWj, К1j, К2j, К3j, К4j, К5j и величина Voj хранятся в ПЗУ вычислительного устройствa 35 для каждого j-го типа баллистик и выбираются при расчете в зависимости от конкретного типа баллистики, считываемого из блока переключения баллистик 2. Величина дальности Д считывается из регистра дальности 1. Время измерения дальности tД считывается из таймера 38 по соответствующему адресу, выходы таймера имеют буфер с третьим состоянием и подключаются на шину данных по сигналу с селектора адреса 36. Информация о сигналах с потенциометров ввода поправок на изменение температуры воздуха (Δ TВ) - 6, температуры заряда (Δ TД) - 7, атмосферного давления (Δ Н) - 8, начальной скорости полета снаряда (Δ Vо) - 9, расширение канала ствола (Δ d) - 10, об индивидуальных углах вылета снарядов в вертикальной плоскости λ α j и в горизонтальной плоскости λ β j с блоков ввода индивидуальных углов 4 и 5 соответственно через коммутатор 3 поступает на коммутатор аналоговых сигналов 13. Передача через коммутатор 3 только индивидуальных углов вылета для выбранного типа снаряда осуществляется посредством подключения выходов блока переключения баллистик 2 к управляющим входам коммутатора 3. Ко входам коммутатора 13 также подключены сигнал о скорости движения танка VT и о курсовом угле cos q через БАЗ 12. Выход коммутатора 15 соединен с одним из входов коммутатора 25, к остальным входам которого подключены датчик бокового ветра W через ФНЧ 14 и БАЗ 16, датчик угла положения пушки относительно корпуса танка ϕ через ФНЧ 15 и БАЗ 17, сигналы относительной угловой скорости цели в горизонтальной плоскости ω г через УФНЧ 18 и БАЗ 20 и в вертикальной плоскости ω B через УФНЧ 19 и БАЗ 21, сигнал датчика бокового крена танка γ через БАЗ 22, сигналы с датчиков углов вертикального наведения ДУBН через БАЗ 24 и горизонтального наведения ДУГИ через БАЗ 27, разностные сигналы ДУВН - α через БАЗ 26 и ДУГН - β через БАЗ 29. ФНЧ 14 и 15 реализуют передаточную функцию вида

где К - коэффициент передачи фильтра;
Т = (1± 0,2) с - постоянная времени фильтра. ФНЧ предназначены для получения сглаженных значений бокового ветра и угла подъема пушки и могут быть реализованы на обычной RC-цепи.
УФНЧ 18 и 19 реализуют передаточную функцию вида  где постоянная времени фильтра Т определяется следующим соотношением:
где постоянная времени фильтра Т определяется следующим соотношением:
Детальное пояснение работы УФНЧ изложено в прототипе (а.с. 151447) и здесь не приводится.
Сигналы с коммутаторов 13 и 23 через развязывающий усилитель 50 поступают на вход АЦП 31. Последовательность, прохождения сигналов и их преобразования определяется адресной шиной устройства управления и синхронизации 51, которая через коммутатор адреса 34 подключается также к адресным входам БОЗУ 33, что обеспечивает однозначное соответствие между преобразуемым сигналом и адресом, по которому результат аналого-цифрового преобразования данного сигнала с АЦП 31 через коммутатор данных 32 записывается в БОЗУ 33. Запись осуществляется по сигналу с устройства управления и синхронизации 51. Направление передачи данных из АЦП 31 в БОЗУ 33 и адреса от устройства управления и синхронизации 51 к БОЗУ 33 является основным. Переключение коммутаторов 32 и 34 происходит только при считывании данных из БОЗУ 33 в вычислительное устройство 35, что занимает незначительный промежуток времени (1 мкс для одного сигнала).
Таким образом, в БОЗУ 33 по заранее определенным фиксированным адресам содержатся цифровые коды, соответствующие напряжениям с потенциометров и датчиков входной информации.
Информация о сигналах λ α j, λ β j, ΔТВ, ΔТ3, ΔН, ΔVо, Δd, VТ, cos q, W, ϕ , sinγ , ω г, ω B используется для расчетов по приведенному алгоритму. Информация о сигнале ручной дальности Др используется в том случае, если вычислительным устройством 35 из согласующего устройства 37 будет считан активный уровень по сигналу Ручн/Авт, что свидетельствует о необходимости ручного ввода дальности. При этом информация с регистра дальности 1 игнорируется. Информация о сигналах ДУВН ДУГН и разностных сигналах ДУВН-α и ДУГН-β непосредственно для расчетов не требуется и может быть использована для контроля отработки выдаваемых сигналов системой.
Учет различной крутизны сигналов с датчиков и их нормировка к виду, необходимому для расчетов, осуществляется в вычислительном устройстве 35 умножением на соответствующие нормировочные коэффициенты, хранящиеся в ПЗУ вычислительного устройства 35.
Цифровые коды величин угла прицеливания α и бокового упреждения β , полученные в результате расчетов, записываются соответственно в регистры 39 и 40. Запись осуществляется по сигналам с селектора адреса 36 при появлении соответствующего адреса на шине адреса вычислительного устройства 35. Преобразование двоичных цифровых кодов в аналоговые сигналы переменного напряжения, необходимые для работы системы, осуществляются и помощью умножающих ЦАПов 42 и 43, на входы которых поступает опорное напряжение каналов соответственно вертикального и горизонтального наведений требуемой фазы. Сигналы с ЦАП 42 и 43 поступают на вычитающие входы сумматоров 25 и 28 соответственно. На другие входы сумматоров 25, 28 поступают сигналы с датчиков углов наведения и сигналы электрической выверки прицела Выв α и Выв β соответственно. При этом на выходе сумматора 25 получается разностный сигнал
αΣ =ДУВН-α ± Выв α ,
а на выходе сумматора 28
βΣ =ДУГН-β ± Выв β .
Сигналы α Σ и β Σ являются выходными сигналами ТБВ и поступают на входы привода, который осуществляет наведение, отрабатывая эти сигналы на нуль. В итоге при αΣ =0 и βΣ =0 (после отработки) мы имеем
ДУВН=α ±Выв α ;
ДУГН=β ± Выв β ,
то есть положение пушки (определяемое сигналами с датчиков наведения) соответствует углам прицеливания α и бокового упреждения β , выработанным в ТБВ.
Сигналы электрической выверки Выв α и Выв β необходимы для того, чтобы компенсировать остаточный сигнал датчика при согласованном положении прицела, и вводятся при настройке в составе танка. Сумматоры 44 и 48, компараторы 45 и 49, потенциометры регулировки ширины зоны 46 и 50, схема совпадения 47 составляют блок выработки зоны разрешения выстрела, работа которого подробно изложена в описании танкового баллистического вычислителя.
В заявляемом вычислителе используется несколько иное техническое решение. Разностные сигналы α Σ и β Σ , представляющие, по существу, сигналы отклонения пушки от вычисленных углов, поступают на БАЗ 26 и 29. БАЗ 26, 29 выполнены таким образом, что с их выходов снимается парафазное напряжение (описание работы БАЗ смотри ниже), то есть на выходах БАЗ 26 мы имеем
где Uсм - постоянное смещение, возникающее как сумма постоянного смещения сигнала ДУШ относительно общего провода, собственных смещений ЦАП 42 и сумматора 25, смещения сумматора 25 от постоянной составляющей по сигналу Выв α . Так как выходы БАЗ 26 соединены с разнополярными входами сумматора 44, на выходе сумматора мы имеем

Таким образом, приведенная схема позволяет подавлять постоянное смещение, которое в противном случае приводило бы к смещению зоны разрешения выстрела. Напряжение с выхода сумматора 44 на компараторе 45 сравнивается с порогом, вводимым потенциометром ширины зоны разрешения 46. В случае Uвых Σ <Uпор (рассогласование мало) на схему совпадения 47 поступает высокий (разрешающий) уровень напряжения. Аналогично работает и схема по каналу β . При поступлении в вычислитель на схему совпадения 47 сигнала питание схемы совпадения ПСС с пусковой кнопки прицела сигнал "Зона разрешения выстрела" (ЗРВ) будет выдан только при наличии высоких уровней с компараторов 46 и 49, то есть выстрел произойдет только в случае совпадения положения пушки с углами, выработанными вычислителем (за исключением допустимого рассогласования, вводимого с потенциометров 46 и 50).
При поступлении на согласующее устройство 37 сигнала "Сброс", что свидетельствует о сбросе измеренной дальности, ТБВ выдает углы α и β равными нулю.
При выборе баллистики управляемого снаряда расчет углов прицеливания и бокового упреждения производится по следующему алгоритму в зависимости от поступления на согласующее устройство 37 сигнала "Превышение":
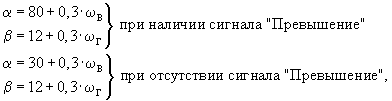
где обозначения сигналов соответствуют аналогичным в основном алгоритме, величины относительных угловых скоростей цели ω B и ω г считываются вычислительным устройством 35 из БОЗУ 33 так же, как и в штатном режиме. При работе с управляемым снарядом при поступлении на согласующее устройство 37 сигнала "Сход" и наличии сигнала "Превышение", ТБВ вырабатывает сигнал о времени задержки (τ зад) управляемого снаряда, предназначенный для работы в запыленной местности. Вычисление величины задержки производится по следующей зависимости:
τ зад =-3,4+3·10-3(Д-Δ Д)(1-0,65·10-3·Δ Т3 -
1,2·1-3·Δ ТВ+0,31·10-3·Δ Н),
где Δ Д=(VT·cos q+ Vц.ф)((tcx-tизм);
Vц.ф - фиктивная скорость цели, равная 8,34 м/с;
tсх-tизм - интервал времени между сходом управляемого снаряда и моментом измерения дальности.
Выдача сигнала τ зад производится следующим образом. Через селектор адреса 36 из таймера 38 считывается текущее время, после чего вычислительное устройство 35 выставляет на шине данных активный уровень в определенном разряде, а на шине адреса - адрес согласующего устройства 41, представляющего собой регистр, выходы которого подключены к формирователям сигналов требуемого уровня, входы - к шине данных, а вход записи - к одному из выходов селектора адреса 36. В результате на выходе τ зад согласующего устройства 41 появляется сигнал. Через время, численно равное вычисленному значению τ зад, происходит повторное обращение к согласующему устройству 41 и запись пассивного уровня по данному разряду. При этом выработка выходного сигнала τ зад прекращается.
Применение цифрового вычислительного устройства позволяет осуществить расчет зон встреливания для управляемого снаряда. Расчет производится по следующему алгоритму:
ЗС=П1+П2+П3+П4,
где ЗC - сигнал "Запрет стрельбы";
П1 П2, П3, П4 - признаки ограничений:
П1=0 при Д2 ≤Дmax+ ·tпол,
·tпол,
П2=0 при ω г ,
,
П3=0 при ω B≤0,59 град/с,
П4=0 при ϕ ≤ 12 град,
где Дmax=5000 м, tпол=15,5 с,
 Д1 - дальность, измеренная оператором; Д2 - дальность, измеренная в течете времени Δ t=1... 5 с после измерения Д1, ϕ o=0,6 град/с.
Д1 - дальность, измеренная оператором; Д2 - дальность, измеренная в течете времени Δ t=1... 5 с после измерения Д1, ϕ o=0,6 град/с.
Уровень сигнала ЗС, соответствующий рассчитанному, записывается в согласующее устройство 41 и с выхода ЗC согласующего устройства 41 поступает в исполнительное устройство. При выборе баллистики снаряда с подрывом на траектории происходит выработка углов α и β так же как для штатного типа баллистики. Кроме того, происходит расчет времени установки взрывателя ty=tп/512, где tп - полетное время, с учетом отклонений условий стрельбы от нормальных, расчитанное в алгоритме.
При поступлении на согласующее устройство 37 сигнала "Запрос" процессор 35 через согласующее устройство 41 выдает два импульса с интервалом между ними, численно равным времени tу. Выдача импульсов осуществляется аналогично выработке сигнала τ зад, описанной выше.
Устройство управления и синхронизации 51 работает следующим образом. Вход сдвигового регистра 52 соединен с выходом "Конец преобразования" АЦП 31, по окончании аналого-цифрового преобразования происходит последовательно по сигналам с выходов регистра 52 запись результата преобразования в БОЗУ 33, прибавление единицы в счетчик адреса 53 и начало следующего преобразования. Младшие разряды счетчика адреса 53 подключены к управляющим входам коммутатора 23, а старшие - ко входам коммутатора 13. За счет этого можно выделить основной цикл преобразования, за время которого преобразуются все сигналы, подсоединенные к коммутатору 23, и один из сигналов, подсоединенных к коммутатору 13, и полный цикл преобразования, за время которого преобразуются все аналоговые сигналы и происходит полное обновление информации. Приведенная организация устройства управления и синхронизации 51 позволяет повысить частоту преобразования сигналов с основных датчиков за счет того, что сигналы, подсоединенные к коммутатору 13, либо квазистационарны, либо изменяются на порядок медленнее, чем сигналы, подсоединенные к коммутатору 23.
Так как сигналы с датчиков имеют различные фазовые сдвиги относительно опорных напряжений, а выборка и запоминание амплитудных значений сигналов на БАЗ должна осуществляться в момент достижения сигналом максимума, необходима синхронизация сигналов выборки с опорным сигналом. Для этой цеди используется счетчик периода 54, который обнуляется каждый период опорного напряжения сигналом со схемы выделения фронта 55. Выходы счетчика 54 подключены к адресным входам ПЗУ 54, в котором прошита информация, соответствующая фазовым сдвигам всех сигналов относительно опорного напряжения. Дешифратор 57 используется с целью увеличения количества выходов устройства и преобразует двоичный код с ПЗУ 56 непосредственно в сигналы выборки, подключенные ко входам выборки БАЗ.
БАЗ 12, 16, 17, 20, 21, 22, 24, 26, 27, 29 работают следующим образом. Запоминаемый сигнал переменного напряжения поступает одновременно на входы аналоговых ключей 58 и 59 (см.фиг.2). На управляющий вход ключа 58 поступают сигналы выборки с дешифратора 54 в моменты времени, соответствующие ψ +π /2, где ψ - фазовый сдвиг для данного датчика, ключ 58 открывается, и на конденсаторе 60 устанавливается значение напряжения, численно равное Um+Uсм, где Um - амплитуда переменного напряжения, Uсм - постоянное смещение сигнала. На управляющий вход ключа 59 поступают сигнал в момент времени  и на конденсаторе 61 запоминается значение напряжения -Um+Uсм. Развязывающие усилители 62 и 63, включенные в режиме повторителей, служат для предотвращения разряда запоминающих конденсаторов 60, 61, и их выходы являются выходами БАЗ. При считывании давних в вычислительное устройство 35 осуществляется усреднение результатов преобразования:
и на конденсаторе 61 запоминается значение напряжения -Um+Uсм. Развязывающие усилители 62 и 63, включенные в режиме повторителей, служат для предотвращения разряда запоминающих конденсаторов 60, 61, и их выходы являются выходами БАЗ. При считывании давних в вычислительное устройство 35 осуществляется усреднение результатов преобразования:
где N - получаемый код сигнала; N1 и N2 - соответственно результаты преобразования напряжений с первого и второго выходов БАЗ. Таким образом исключаются погрешности, возникающие в результате постоянного смещения сигналов, и в результате усреднения происходит увеличение точности.
Выполнение танкового баллистического вычислителя согласно описываемому изобретению позволяет по сравнению с прототипом повысить эффективность стрельбы из танка по движущимся целям, целям в условиях горной местности, низколетящим целям, при стрельбе из движущегося танка от практически нулевой для прототипа до значений, близких к получаемым при стрельбе на равнине по неподвижной цели, за счет введения в танковый баллистический вычислитель сигналов относительной угловой скорости цели в вертикальной плоскости, угла положения пушки относительно корпуса в вертикальной плоскости и учета их в алгоритме посредством использования цифрового вычислительного устройства за счет учета собственной скорости цели посредством двух измерений дальности, учета изменения угла прицеливания при стрельбе с наличием бокового крена танка. Кроме того, описываемое изобретение позволяет повысить эффективность стрельбы управляемыми снарядами за счет учета относительной угловой скорости цели в вертикальной плоскости и расчета зон встреливания, повысить эффективность стрельбы из танка за счет возможности использования снарядов с подрывом на траектории. Также выполнение ТБВ согласно описываемому изобретению позволяет увеличивать количество типов боеприпасов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТАНКОВЫЙ БАЛЛИСТИЧЕСКИЙ ВЫЧИСЛИТЕЛЬ | 1979 |
|
SU1840108A1 |
| ТАНКОВЫЙ БАЛЛИСТИЧЕСКИЙ ВЫЧИСЛИТЕЛЬ | 1979 |
|
SU1840138A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2006 |
|
RU2324134C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ С АВТОМАТОМ КОРРЕКТИРОВАНИЯ СТРЕЛЬБЫ | 2008 |
|
RU2363910C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ | 2007 |
|
RU2345312C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВЫСОКОТОЧНЫМ ОРУЖИЕМ | 2009 |
|
RU2429439C2 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2005 |
|
RU2298759C1 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2004 |
|
RU2275581C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2002 |
|
RU2210715C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2003 |
|
RU2235270C1 |
Изобретение относится к вычислительной технике и предназначено для выработки углов прицеливания и бокового упреждения пушки при стрельбе артиллерийскими и управляемыми снарядами, выработки временного интервала установки взрывателя для артиллерийских снарядов с подрывом на траектории, выработки сигнала “Запрет стрельбы” и времени задержки при стрельбе управляемыми снарядами, выработки зоны разрешения выстрела в системе управления огнем танка. Техническим результатом является увеличение точности вычислений. Устройство содержит сумматоры, коммутаторы, потенциометры ввода поправок, блок ручного ввода дальности, фильтры нижних частот, цифроаналоговые преобразователи, аналого-цифровой преобразователь, блоки ввода индивидуальных углов вылета снаряда в вертикальной и горизонтальной плоскостях, блоки аналогового запоминания, развязывающий усилитель, компараторы, блок переключения баллистик, цифровое вычислительное устройство, регистры, согласующие устройства, таймер, буферное оперативное запоминающее устройство, селектор адреса, схема совпадения, потенциометры регулировки ширины зоны разрешения в вертикальной и горизонтальной плоскостях, устройство управления и синхронизации. 2 з.п. ф-лы, 5 ил.
| US 3739153 A, 12.06.1973. |

