Текст описания в факсимильном виде (см. графическую часть).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД РОБОТА | 2007 |
|
RU2348509C1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2010 |
|
RU2423225C1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2009 |
|
RU2398672C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2018 |
|
RU2705739C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2006 |
|
RU2311284C1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2012 |
|
RU2489250C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2002 |
|
RU2214327C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2010 |
|
RU2443543C1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2012 |
|
RU2488480C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2003 |
|
RU2228257C1 |
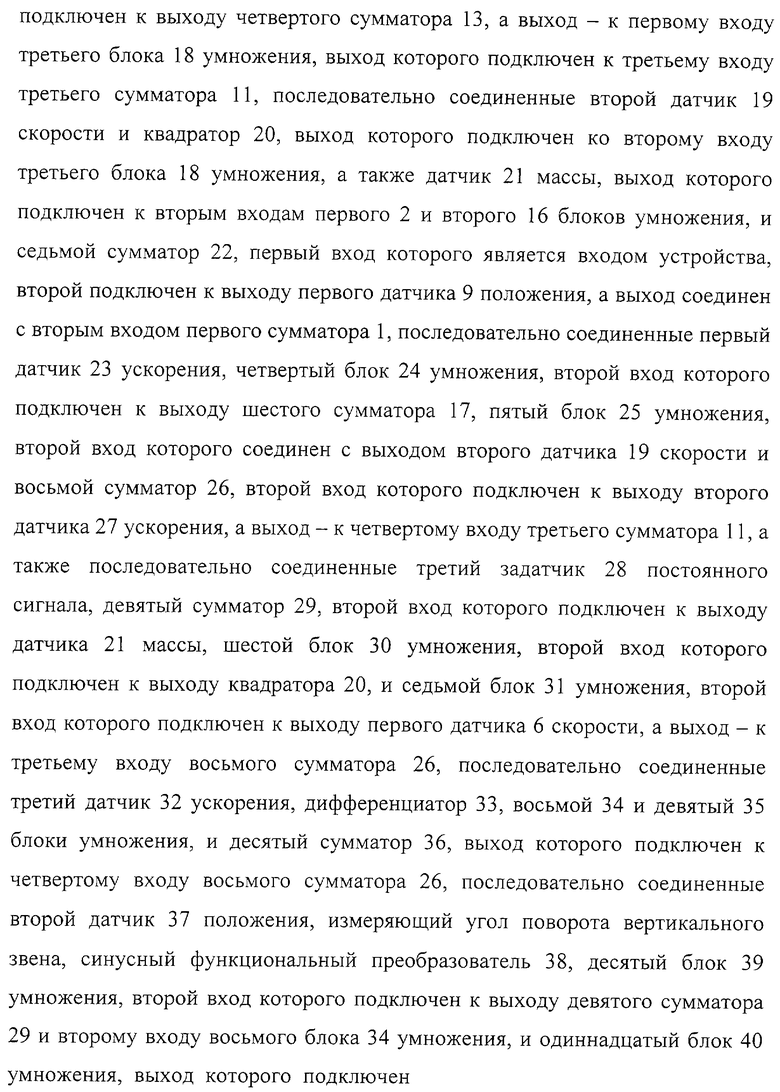

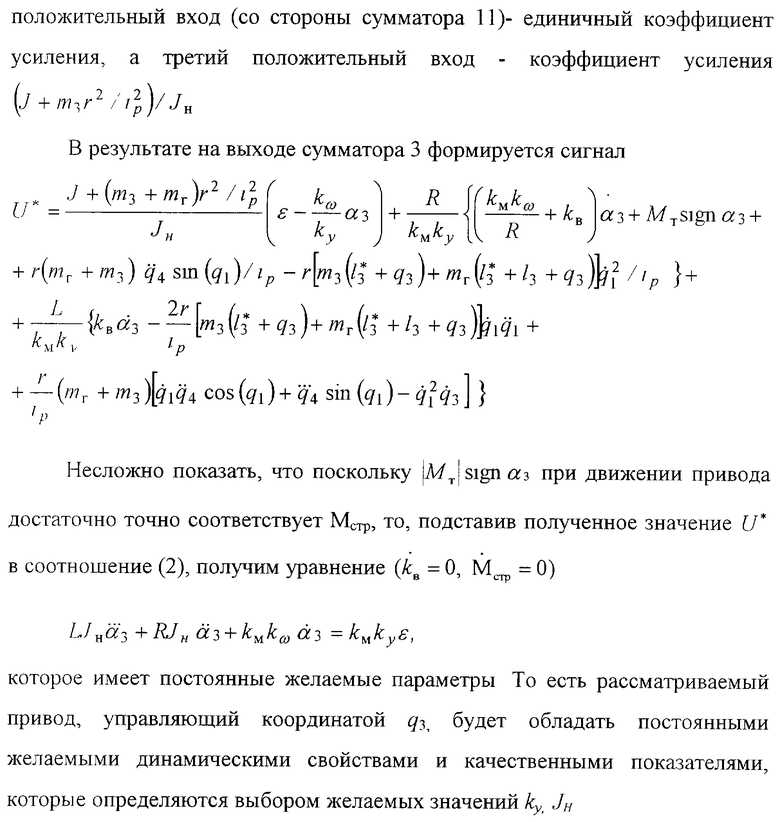
Изобретение относится к робототехнике и может быть использовано при создании систем управления приводами роботов. Технический результат заключается в обеспечении полной инвариантности динамических свойств электропривода к непрерывным и быстрым изменениям его динамических моментных нагрузочных характеристик при движении манипулятора по всем четырем степеням подвижности и, тем самым, в повышении динамической точности управления. Устройство содержит усилитель, электродвигатель, редуктор, датчики положения, скорости, ускорения, релейный блок, задатчики постоянного сигнала, датчик массы, квадратор, дифференциатор, синусный и косинусный функциональные преобразователи, сумматоры, блоки умножения. 3 ил.
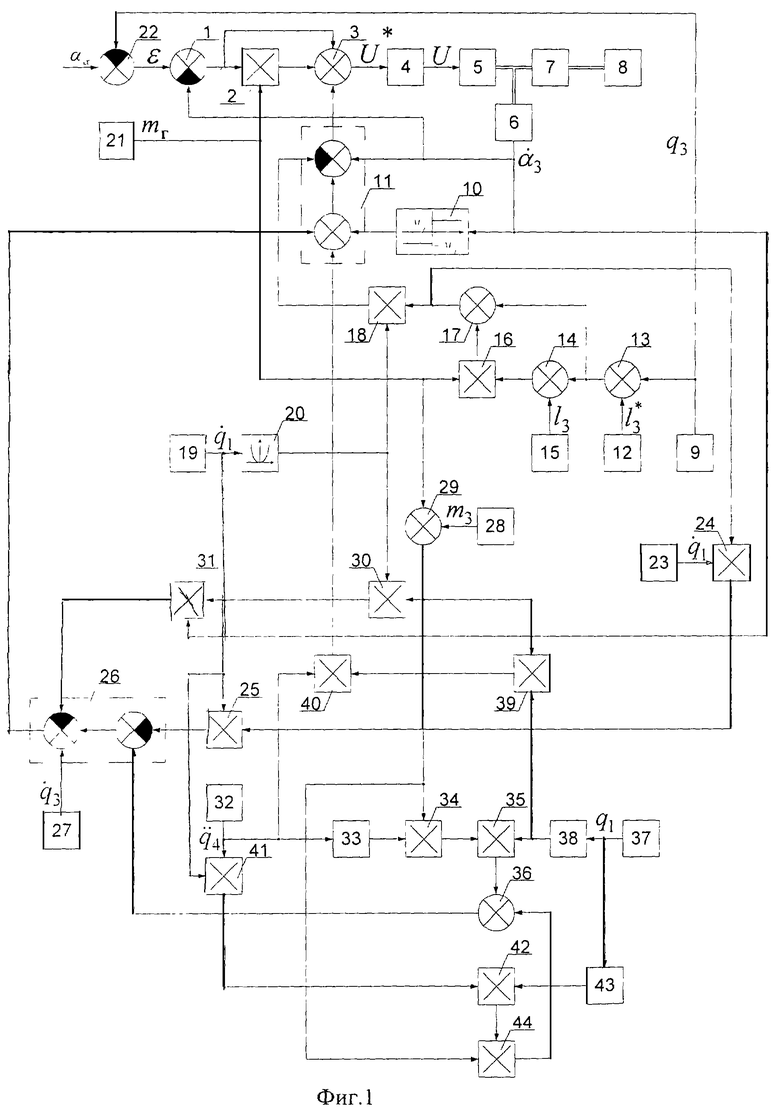
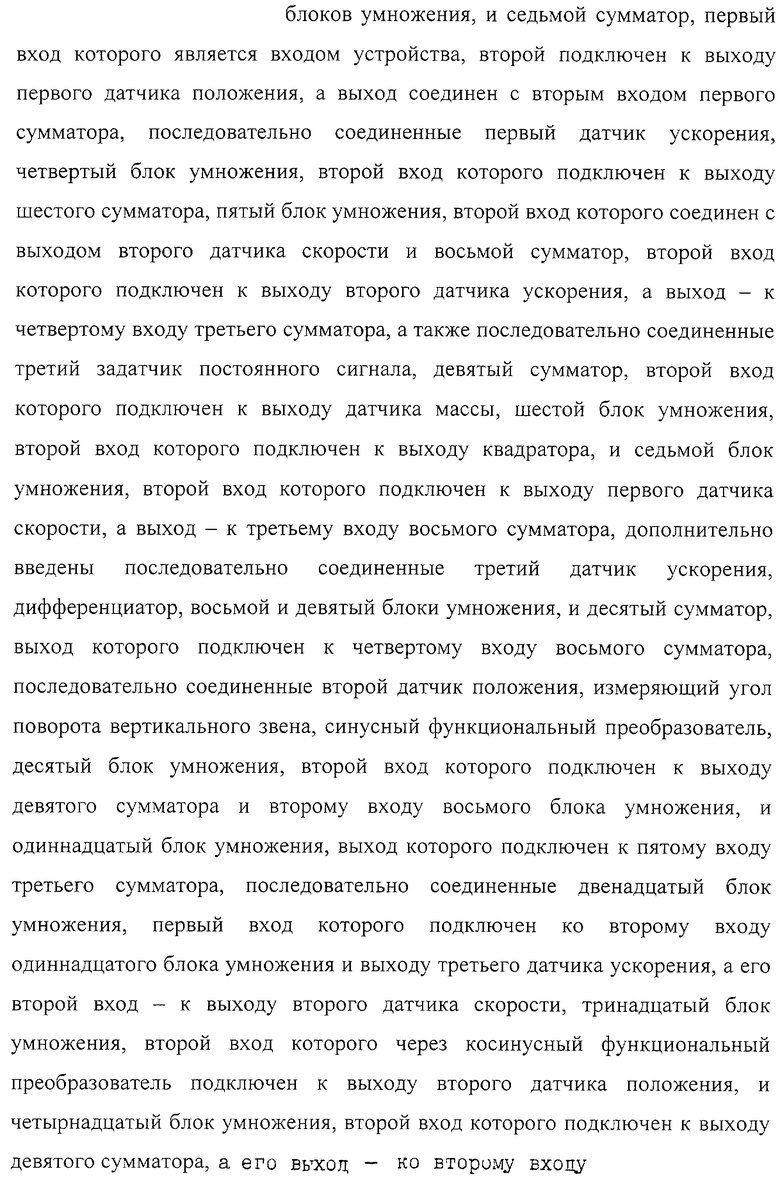
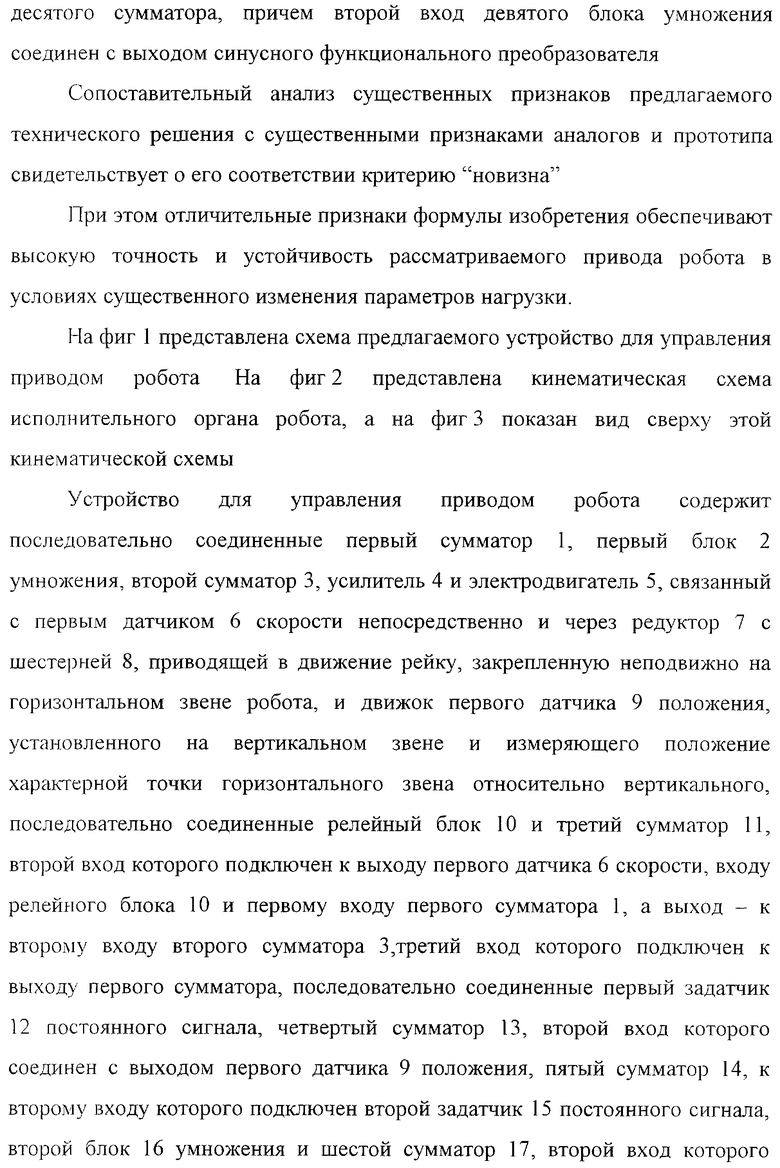
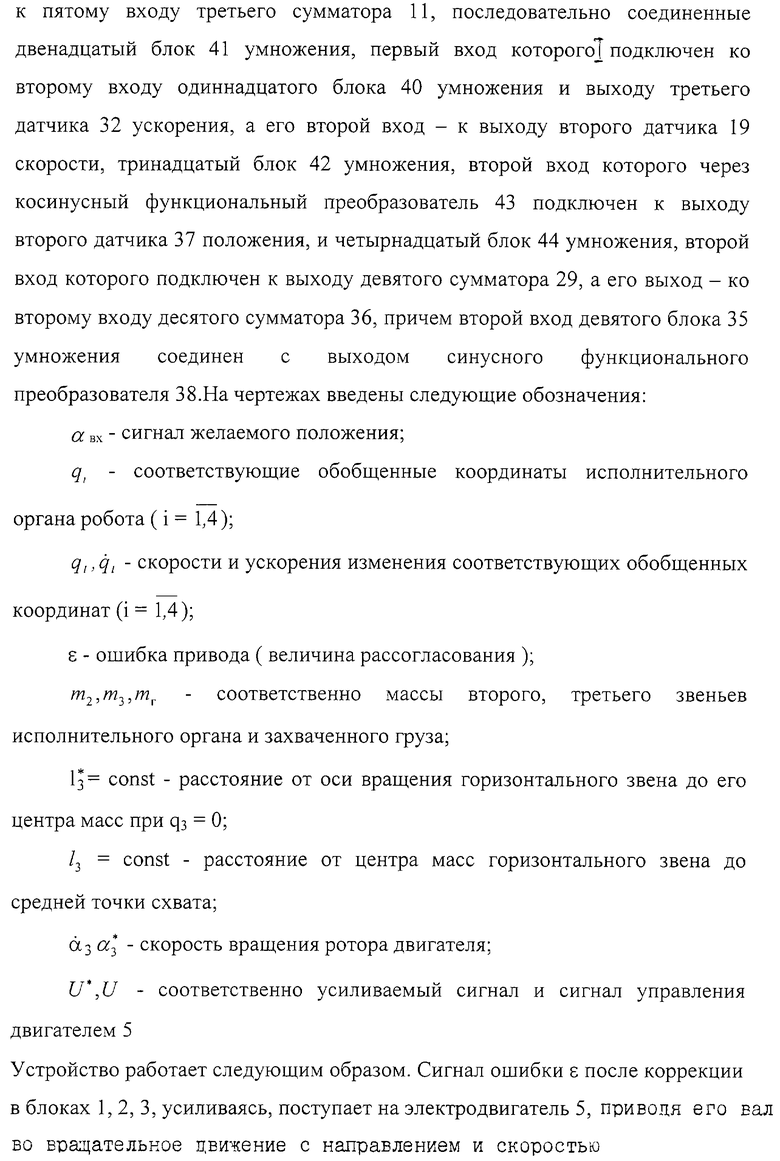
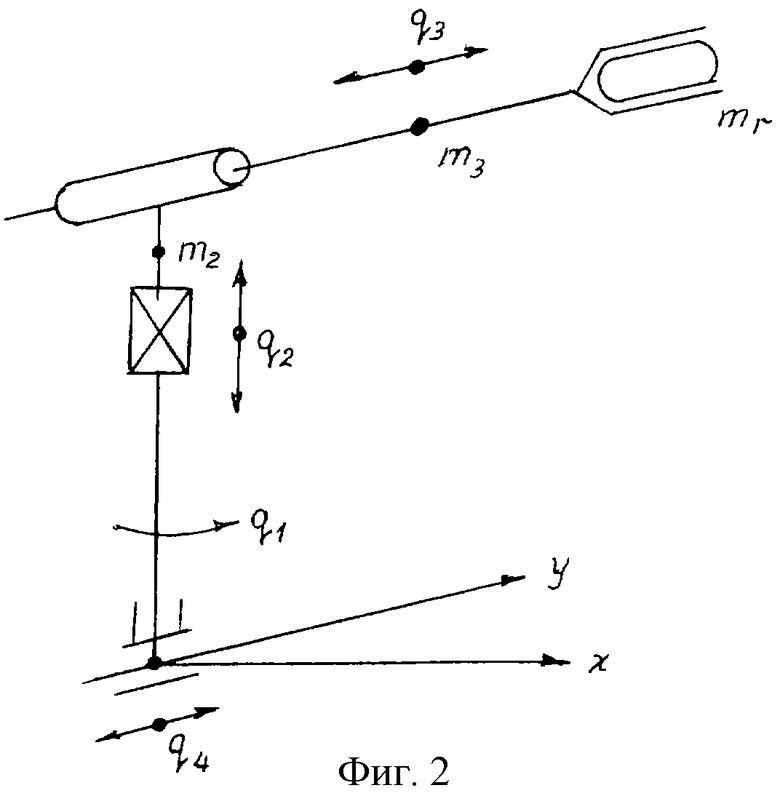
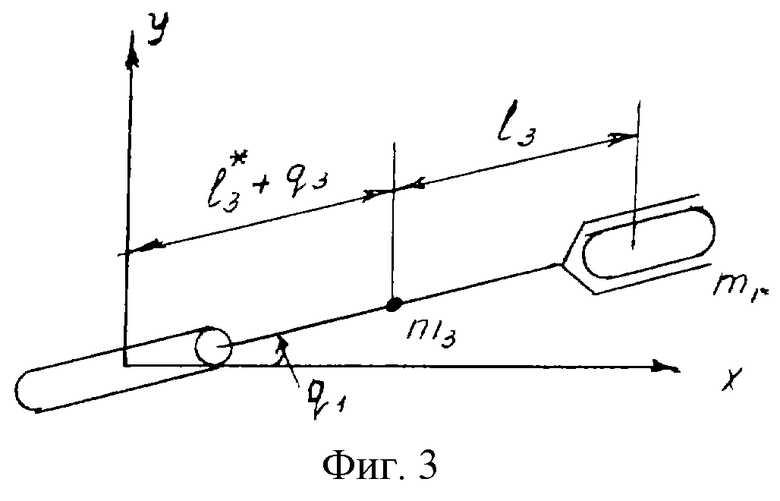
Устройство для управления приводом робота, содержащее последовательно соединенные первый сумматор, первый блок умножения, второй сумматор, усилитель и электродвигатель, связанный с первым датчиком скорости непосредственно и через редуктор с шестерней, приводящей в движение рейку, закрепленную неподвижно на горизонтальном звене робота, и движок первого датчика положения, установленного на вертикальном звене и измеряющего положение характерной точки горизонтального звена относительно вертикального, последовательно соединенные релейный блок и третий сумматор, второй вход которого подключен к выходу первого датчика скорости, входу релейного блока и первому входу первого сумматора, а выход - к второму входу второго сумматора, третий вход которого подключен к выходу первого сумматора, последовательно соединенные первый задатчик постоянного сигнала, четвертый сумматор, второй вход которого соединен с выходом первого датчика положения, пятый сумматор, к второму входу которого подключен второй задатчик постоянного сигнала, второй блок умножения и шестой сумматор, второй вход которого подключен к выходу четвертого сумматора, а выход - к первому входу третьего блока умножения, выход которого подключен к третьему входу третьего сумматора, последовательно соединенные второй датчик скорости и квадратор, выход которого подключен ко второму входу третьего блока умножения, а также датчик массы, выход которого подключен к вторым входам первого и второго блоков умножения, и седьмой сумматор, первый вход которого является входом устройства, второй подключен к выходу первого датчика положения, а выход соединен с вторым входом первого сумматора, последовательно соединенные первый датчик ускорения, четвертый блок умножения, второй вход которого подключен к выходу шестого сумматора, пятый блок умножения, второй вход которого соединен с выходом второго датчика скорости, и восьмой сумматор, второй вход которого подключен к выходу второго датчика ускорения, а выход - к четвертому входу третьего сумматора, а также последовательно соединенные третий задатчик постоянного сигнала, девятый сумматор, второй вход которого подключен к выходу датчика массы, шестой блок умножения, второй вход которого подключен к выходу квадратора, и седьмой блок умножения, второй вход которого подключен к выходу первого датчика скорости, а выход - к третьему входу восьмого сумматора, отличающееся тем, что в него дополнительно введены последовательно соединенные третий датчик ускорения, дифференциатор, восьмой и девятый блоки умножения, и десятый сумматор, выход которого подключен к четвертому входу восьмого сумматора, последовательно соединенные второй датчик положения, измеряющий угол поворота вертикального звена, синусный функциональный преобразователь, десятый блок умножения, второй вход которого подключен к выходу девятого сумматора и второму входу восьмого блока умножения, и одиннадцатый блок умножения, выход которого подключен к пятому входу третьего сумматора, последовательно соединенные двенадцатый блок умножения, первый вход которого подключен ко второму входу одиннадцатого блока умножения и выходу третьего датчика ускорения, а его второй вход – к выходу второго датчика скорости, тринадцатый блок умножения, второй вход которого через косинусный функциональный преобразователь подключен к выходу второго датчика положения, и четырнадцатый блок умножения, второй вход которого подключен к выходу девятого сумматора, а его выход - ко второму входу десятого сумматора, причем второй вход девятого блока умножения соединен с выходом синусного функционального преобразователя.
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1994 |
|
RU2079867C1 |

