Изобретение относится к области транспортной электроники и предназначено для преобразования параметров резистивно-емкостных датчиков давления, уровня топлива, технологических жидкостей, углов поворота дроссельной заслонки, педалей акселератора, тормоза, сцепления, передних колес и т.д.
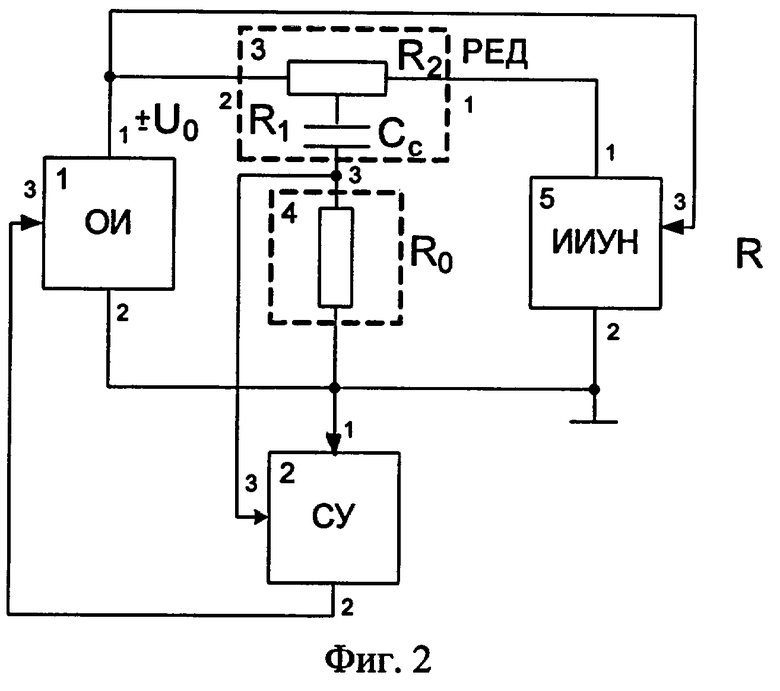
Наиболее близким по техническому решению к предложенному является преобразователь (см. фиг.1), предложенный в АС СССР №1479951, опубликованное в БИ №18 за 1989 г. Это устройство может быть использовано для дистанционного съема показаний приборов в автоматических системах управления. Оно содержит бесконтактный потенциометрический датчик (далее резистивно-емкостной) 1, интегратор 2 и сравнивающее устройство 3. Устройство функционирует таким образом, что период электрических колебаний, возникающих в нем, пропорционален отклонению стрелки стрелочного прибора. На фиг.1 также показаны сопротивление резистивного слоя датчика R0, сопротивление, пропорциональное углу поворота стрелки стрелочного прибора, Rx, емкость связи резистивно-емкостного датчика Сc, постоянная времени интегратора RpCp.
Основным недостатком известного устройства является некоторое влияние емкости связи резистивно-емкостного датчика Сc на результат измерений, а также высокое входное сопротивление преобразователя (относительно не высокая помехоустойчивость).
Задачей, на решение которой направлено предлагаемое изобретение, является повышение точности преобразования из-за полного исключения влияния емкости связи резистивно-емкостного датчика Сс на результат преобразования.
Это достигается тем, что в измерительный преобразователь параметров датчиков малых и больших перемещений транспортного средства, содержащий резистивно-емкостной датчик перемещений, опорный источник напряжений и сравнивающее устройство, дополнительно введены опорный резистор, и инвертирующий источник управляемого напряжения (например, интегратор), причем опорный источник напряжений выбран двухполярным с возможностью поочередного переключения полярности по команде сравнивающего устройства, при этом выводы резистивного слоя датчика соединены соответственно с выходами опорного источника напряжений и инвертирующего источника управляемого напряжения, вывод бесконтактного (емкостного) токосъемника одновременно соединен со входом сравнивающего устройства и через опорный резистор с общим проводом преобразователя; в свою очередь, управляющий выход сравнивающего устройства соединен со входом опорного источника напряжений, выход которого соединен с сигнальным входом инвертирующего источника управляемого напряжения.
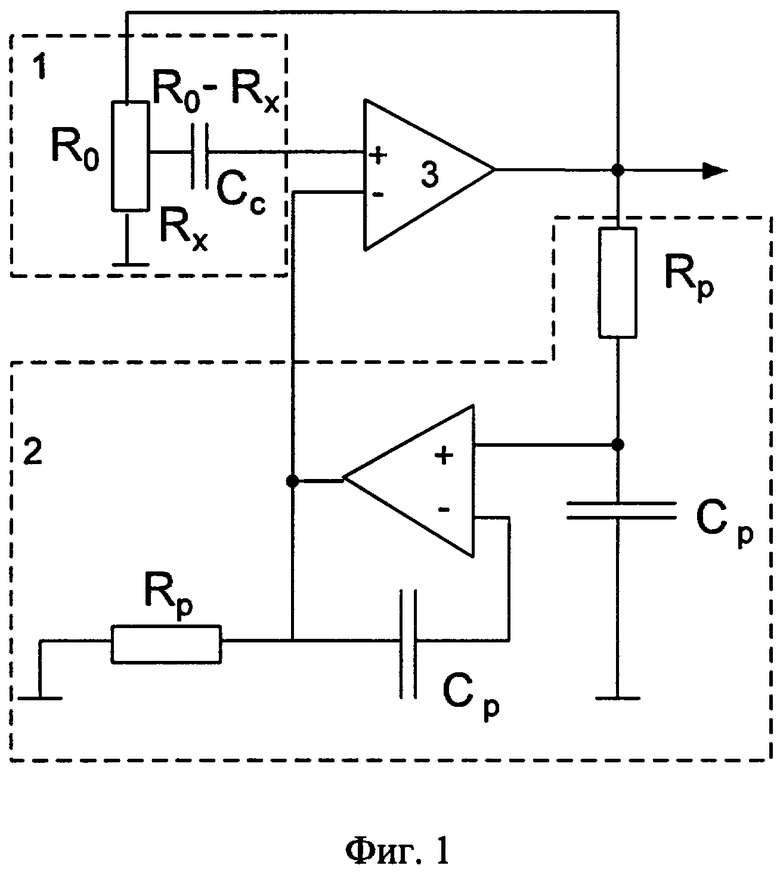
На фиг.2 изображена функциональная схема измерительного преобразователя, позиции на чертеже обозначают: 1 - опорный источник напряжений (ОИ), 2 - сравнивающее устройство (СУ), 3 - резистивно-емкостной датчик (РЕД), 4 - опорный резистор R0, 5 - инвертирующий источник управляемого напряжения (ИИУН).
Резистивно-емкостной датчик 3 вторым выводом резистивного слоя соединен с первым выходом опорного источника напряжений 1, с этим же выходом соединен третий вход инвертирующего источника управляемого напряжения 5, а с первым выходом последнего соединен первый вывод резистивно-емкостного датчика 3. Третий вывод (бесконтактного токосъемника) РЕД соединен одновременно с одной клеммой резистора R0 и с третьим входом сравнивающего устройства 2, а первый вход сравнивающего устройства 2, вторые выходы опорного источника напряжений и инвертирующего источника управляемого напряжения и оставшаяся клемма резистора R0 соединены с общим проводом преобразователя. Второй выход сравнивающего устройства 2 соединен с третьим входом опорного источника напряжений 1.
Работает предлагаемый измерительный преобразователь следующим образом (см. фиг.2).
В момент включения питания, за счет глубокой положительной обратной связи на выходе сравнивающего устройства установится напряжение насыщения, например U0. При этом на выходе опорного источника напряжений тоже установится напряжение U0. Это напряжение поступает на один из выводов резистивного слоя датчика и на третий вход инвертирующего источника управляемого напряжения. Выходной сигнал инвертирующего источника управляемого напряжения будет иметь вид
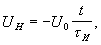
где t - текущее время;
τи - постоянная времени инвертирующего источника управляемого напряжения.
Для получения значения напряжения в точке съема информации с резистивно-емкостного датчика воспользуемся методом суперпозиции для двух напряжений.
Потенциал, создаваемый в точке съема от сигнала с выхода опорного источника напряжений, будет
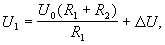
где R1 и R2 - сопротивления плеч резистора резистивно-емкостного датчика;
ΔU - падение напряжения от опорного источника напряжений на выходном сопротивлении инвертирующего источника управляемого напряжения.
Потенциал, создаваемый в точке съема от сигнала с выхода инвертирующего источника управляемого напряжения, будет
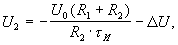
где ΔU - падение напряжения от инвертирующего источника управляемого напряжения на выходном сопротивлении опорного источника напряжений.
В начальный момент времени напряжение U2=0 и соответственно сравнивающее устройство имеет на входе только напряжение U1, что собственно и поддерживает на выходе +U0. Но суммарное напряжение на входе сравнивающего устройства фактически состоит их двух компонент

где кД - коэффициент передачи делителя из емкости токосъемника датчика и R0.
В момент равенства нулю суммарного напряжения произойдет изменение знака выходного напряжения сравнивающего устройства на противоположное и оно станет -U0.
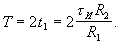
Момент времени t1 переключения выходного напряжения сравнивающего устройства определяется

соотношением плеч резистора и не зависит от значения емкости токосъемника.
С изменением знака выходного сигнала сравнивающего устройства произойдет повторение вышеописанного процесса, но только с противоположными знаками. Период колебаний будет определяться как
В схемотехническом исполнении опорный источник напряжений и сравнивающее устройство могут быть реализованы одним блоком.
Преобразователь содержит типовые узлы, описанные в книгах Горошкова Б.Н. Радиотехнические устройства. - М.: Радио и связь, 1985 г. и Вениаминова В.Н. и др. Микросхемы и их применение. - М.: Радио и связь, 1985 г., и легко реализуются практически.
Использование измерительного преобразователя параметров датчиков позволяет повысить точность преобразования из-за полного исключения влияния емкости связи резистивно-емкостного датчика Сc на результат преобразования и использовать предложенное устройство для преобразования параметров резистивно-емкостных датчиков давления, уровня топлива, технологических жидкостей, углов поворота дроссельной заслонки, педалей акселератора, тормоза, сцепления, передних колес и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ РАСХОДА ВОЗДУХА | 2001 |
|
RU2215265C2 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПАРАМЕТРОВ РЕД С ЗАЗЕМЛЕННОЙ ЕМКОСТЬЮ СВЯЗИ | 2005 |
|
RU2297598C1 |
| УНИВЕРСАЛЬНЫЙ МОДУЛЬ ЧАСТОТНОГО ИНТЕГРИРУЮЩЕГО РАЗВЁРТЫВАЮЩЕГО ПРЕОБРАЗОВАТЕЛЯ ДЛЯ ДАТЧИКОВ ФИЗИЧЕСКИХ ВЕЛИЧИН | 2016 |
|
RU2631494C1 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ХРАНЕНИЯ ЦЕННОСТЕЙ И ДОКУМЕНТОВ | 1992 |
|
RU2032058C1 |
| Способ преобразования положения подвижного бесконтактного токосъемника резистивно-емкостного датчика | 1987 |
|
SU1446451A1 |
| УСТРОЙСТВО ПОДКЛЮЧЕНИЯ ПАРАМЕТРИЧЕСКИХ ДАТЧИКОВ | 2006 |
|
RU2319110C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ПАРАМЕТРОВ ЕМКОСТНОГО И РЕЗИСТОРНОГО СЕНСОРОВ В ЧАСТОТНЫЙ СИГНАЛ | 2008 |
|
RU2362988C1 |
| Бесконтактный преобразователь перемещений | 1990 |
|
SU1716308A1 |
| Измерительный преобразователь емкостного датчика | 1988 |
|
SU1677667A1 |
| УСТРОЙСТВО КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АККУМУЛЯТОРА | 1993 |
|
RU2091923C1 |
Изобретение относится к области транспортной электроники и предназначено для преобразования параметров резистивно-емкостных датчиков давления, уровня топлива, технологических жидкостей, углов поворота дроссельной заслонки, педалей акселератора, тормоза, сцепления, передних колес и т.д. Устройство содержит резистивно-емкостной датчик, включенный между выходами опорного источника напряжений и инвертирующего источника напряжений. Вывод бесконтактного токосъемника резистивно-емкостного датчика соединен с одним входом сравнивающего устройства непосредственно, а с другим входом сравнивающего устройства и с общим проводом устройства - через опорный резистор. Опорный источник напряжений является двухполярным и имеет возможность поочередно переключать полярность опорного напряжения по команде сравнивающего устройства. Период электрических колебаний, возникающих в преобразователе, пропорционален соотношению сопротивлений плеч резистивно-емкостного датчика. Техническим результатом настоящего решения является повышение точности преобразования перемещений за счет исключения влияния емкости резистивно-емкостного датчика на результат преобразования. 2 ил.
Измерительный преобразователь параметров датчиков малых и больших перемещений транспортного средства, содержащий резистивно-емкостной датчик перемещений, опорный источник напряжений и сравнивающее устройство, отличающийся тем, что в него введены опорный резистор и инвертирующий источник управляемого напряжения (например, интегратор), причем опорный источник напряжений выбран двухполярным с возможностью поочередного переключения полярности по команде сравнивающего устройства, при этом выводы резистивного слоя датчика соединены соответственно с выходами опорного источника напряжений и инвертирующего источника управляемого напряжения, а вывод бесконтактного (емкостного) токосъемника одновременно соединен со входом сравнивающего устройства и через опорный резистор с общим проводом преобразователя, управляющий выход сравнивающего устройства соединен со входом опорного источника напряжений, выход которого соединен с сигнальным входом инвертирующего источника управляемого напряжения.
| Устройство для дистанционного съема показаний стрелочного прибора | 1987 |
|
SU1479951A1 |
| Бесконтактный преобразователь перемещений с частотным выходом | 1982 |
|
SU1116299A1 |
| DE 19829565 A1, 05.01.2000. | |||

