Изобретение относится к области компрессоростроения, в частности к его регулированию и защите.
Известны способы противопомпажного регулирования и защиты компрессора (А.С. №1825899, 771359, F 04 D 27/02, проспект фирмы ″Compressor Controls Corporation″ "Регулирование, улучшающее надежность и эффективность турбомашин", США, 1992 г., ″Опыт эксплуатации систем противопомпажного регулирования и защиты газоперекачивающих агрегатов компрессорных станций″, ВНИИЭГазпром, Обзорная информация. Серия "Транспорт и хранение газа", вып. 10, М., 1986 г.).
В указанных способах противопомпажное регулирование и защита осуществляются измерением, например, параметров (расход, давление и т.п.) во всасывающей и нагнетательной магистралях и/или всевозможным регулированием с помощью уникальных алгоритмов положения дроссельной заслонки, тока электропривода и т.п. В этих способах граница помпажа определяется на заводе-изготовителе компрессора и/или на месте эксплуатации в ходе наладочных испытаний, наносится на газодинамические характеристики компрессора и в последующем принимается постоянной в течение длительных межремонтных и/или других эксплуатационных периодов, которые могут длиться годами. Далее с принятым запасом относительно границы помпажа на газодинамические характеристики компрессора наносят линию настройки регулирования и защиты таким образом, чтобы при приближении режимной точки к этой линии начиналось срабатывание соответствующих исполнительных органов.
Основным недостатком рассматриваемых способов является недостаточная точность определения фактического режима работы компрессора, положения границы помпажа и линии настройки срабатывания противопомпажного регулирования, определяемых координатами характеристики компрессора, т.е. степенью сжатия, производительностью и т.п., измерение которых производится по косвенным параметрам без привязки к прямым параметрам, определяющим предпомпажное состояние компрессора, например, начала развития вращающегося срыва. Кроме того, известно, что в процессе эксплуатации граница помпажа может смещаться из-за загрязнения, обледенения, износа и других причин (см., например, К.П.Селезнев, В.В.Огнев, А.И.Гительман. Анализ рабочего процесса компрессора. Компрессорная техника и пневматика, №14-15, 1997 г.). Положением границы помпажа определяются также остальные зоны газодинамических характеристик компрессора, в частности, зона максимальных КПД компрессора, линии постоянной частоты вращения и др. (см., например, К.П.Селезнев, Ю.С.Подобуев, С.А.Анисимов. Теория и расчет турбокомпрессоров. "Машиностроение", Л., 1968 г., 406 с.). В указанных способах эти факторы не учитываются, т.е. помимо низкой точности, связанной с косвенными измерениями, имеют место низкая надежность регулирования и защиты, поскольку, например, при смещении границы помпажа больше, чем принятый помпажный запас в положении линии настройки, помпаж происходит раньше, чем срабатывает система регулирования и защиты. Кроме того, смещение зоны высоких КПД приводит к тому, что рабочий режим компрессора одновременно со снижением надежности снижает экономичность.
Известны способы противопомпажного регулирования и защиты компрессора (А.С. 1802210, 1783170, 1321927, 1783170, F 04 D 27/02, проспект фирмы АО "СНИКО", Антипомпажные системы, Украина, г.Донецк, 1999 г.). В указанных способах регулирования и защиты осуществляются замеры параметров внутри проточной части компрессора, при этом датчики измеряемых параметров контролируют течение аэродинамического процесса, а с помощью устройств управления производится регулирование режима работы с более высокой точностью, но без учета указанных выше факторов снижения надежности и экономичности.
Способом, наиболее близким по технической сущности к решаемой задаче, является способ стабилизации запаса газодинамической устойчивости турбокомпрессора (см. патент №2098669), заключающийся в использовании в качестве параметра давления спектральных составляющих его колебаний, сравнении частот спектральных составляющих с частотой вращения ротора, формировании двухкомпонентного сигнала, состоящего из целократных АЧХ и сдвига по фазе между некратными составляющими, и сравнении двухкомпонентного сигнала управления с пороговым значением, являющимся функцией частоты вращения ротора компрессора. Получаемая точность определения газодинамической устойчивости и эффективность управления продолжают повышаться, однако, точность из-за сложности двухкомпонентной процедуры формирования сигнала управления остается недостаточно высокой, а от указанных выше факторов снижения эксплуатационной надежности и экономичности рассмотренный способ не предохраняет.
Задачей предлагаемого изобретения является повышение точности, надежности и экономичности работы турбокомпрессора.
Технический результат поставленной задачи достигается тем, что в способе регулирования режимов работы компрессора, заключающемся в измерении параметра колебаний давления в его проточной части и формировании сигналов управления, предлагается в диапазоне возможных режимов работы компрессора определять в координатах газодинамических характеристик α (абсцисса) и π (ордината) базовую границу возникновения вращающегося срыва πбаз=f(αбаз), используя в качестве сигнала по вращающемуся срыву максимум автокорреляционной функции параметра колебаний давления, после чего через интервал времени (Δτ), который выбирают по условиям эксплуатации компрессора в диапазоне Δτ=n с ... m ч, определять смещение режима возникновения вращающегося срыва при i-М вызове относительно базовой границы по соотношению Δαi=αi-αбаз (πi) и затем абсциссы точки рабочего режима и линии настройки систем противопомпажного регулирования и защиты, имевшие место при i-M вызове, смещать на величину Δα=f(π), соответствующую изменению запаса по помпажу, имевшему место при смещении Δαi. При этом вызов сигнала возникновения вращающегося срыва осуществляют путем снижения частоты вращения компрессора для сетей с характеристикой, близкой к горизонтальной, и/или путем прикрытия дросселя для сетей с характеристикой, близкой к дроссельной. Сигнал по вращающемуся срыву, возникающий в интервалах времени Δτ между вызовами, используют для срабатывания системы противопомпажного регулирования и защиты компрессора.
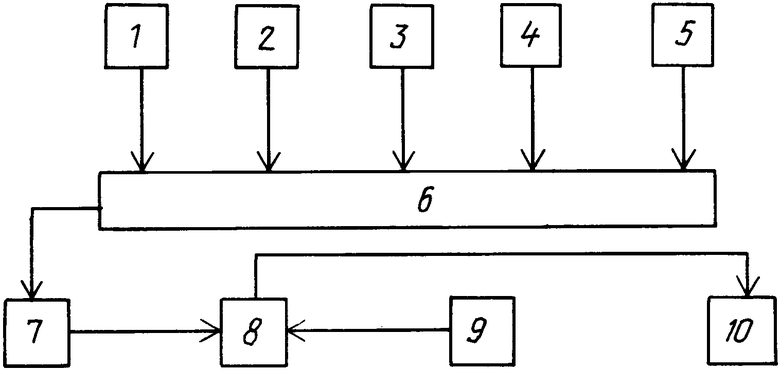
На чертеже представлена структурная схема устройства для реализации предложенного способа.
Устройство содержит датчики 1, 2 пульсаций давления в проточной части компрессора, датчик 3 перепада давления на конфузоре (ΔРкон) всасывающего патрубка компрессора, датчики давления на всасывании 4 (РН) и нагнетании 5 (РК) компрессора, соединенные с аналого-цифровым преобразователем 6, который выходом соединен с цифровым сигнальным процессором 7, выход которого соединен с одним из входов системы автоматического управления компрессором (САУ) 8. Другим входом САУ 8 соединена с таймером 9. Выход САУ 8 соединен с исполнительными органами 10.
Способ регулирования режимов работы компрессора реализуется следующим образом.
Датчики 1, 2, 3, 4, 5 соединены каналами связи с входами аналого-цифрового преобразователя 6, который в свою очередь соединен каналом связи с цифровым сигнальным процессором 7, где проводится обработка сигналов, поступающих от датчиков 1, 2, в результате которой формируется сигнал о возникновении вращающегося срыва и обработка сигналов от датчиков 3, 4, 5, в результате которой формируются значения координат режима на характеристике компрессора в момент сигнала по возникновению вращающегося срыва
 и
и 
(Обоснование этой связи см. Гительман А.И. Динамика и управление судовых ГТУ, Судостроение, Л., 1974 г., 319 с.).
После этого формируется сигнал необходимого сдвига абсцисс Δαi точки рабочего режима и линии настройки системы противопомпажного регулирования и защиты. Далее этот сигнал поступает в САУ 8. Средствами САУ 8 и при использовании исполнительных органов 10 рабочий режим и граница настройки системы противопомпажного регулирования и защиты смещают на Δα в новое значение абсциссы, газодинамических характеристик компрессора, обеспечивая оптимальный помпажный запас рабочего режима, с максимальным КПД компрессора при гарантированной противопомпажной безопасности. Таймер 9, соединенный каналом связи с входом САУ 8, через заданный интервал времени Δτ подает управляющий сигнал в САУ 8, после чего средствами САУ 8 и при использовании исполнительных органов 10 обеспечивается кратковременное перемещение рабочего режима для очередного вызова сигнала возникновения вращающегося срыва, в момент которого формируется очередное значение координат режима вращающегося срыва. При возникновении сигнала вращающегося срыва в интервале времени Δτ между вызовами этот сигнал с цифрового сигнального процессора 7 передается на вход САУ 8 таким образом, чтобы вызвать срабатывание противопомпажного регулирования и защиты.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ РЕЖИМОВ РАБОТЫ КОМПРЕССОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2354851C1 |
| СПОСОБ ЗАПУСКА ОСЕВОГО КОМПРЕССОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2150610C1 |
| Способ автоматической защиты газотурбинного двигателя от помпажа | 2022 |
|
RU2789806C1 |
| СПОСОБ ПРОТИВОПОМПАЖНОЙ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2374143C1 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ ОТ ПОМПАЖА КОМПРЕССОРА ЭЛЕКТРОННОЙ ДВУХКАНАЛЬНОЙ СИСТЕМОЙ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2023 |
|
RU2810867C1 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ ОТ ПОМПАЖА КОМПРЕССОРА | 2023 |
|
RU2801768C1 |
| Способ защиты газотурбинного двигателя от помпажа | 2022 |
|
RU2798129C1 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2005 |
|
RU2295654C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2447418C2 |
| СПОСОБ ЗАЩИТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ ОТ МНОГОКРАТНЫХ ПОМПАЖЕЙ КОМПРЕССОРА | 2017 |
|
RU2670469C1 |
Изобретение относится к области компрессоростроения, в частности к его регулированию и защите. Технический результат заключается в повышении точности, надежности и экономичности режимов работы компрессора. Этот результат достигается тем, что определяют базовую границу возникновения вращающегося срыва, используя в качестве сигнала по вращающемуся срыву максимум автокорреляционной функции параметра колебаний давления, после чего через выбранный интервал времени определяют смещение режима возникновения вращающегося срыва относительно базовой границы и затем абсциссы точки рабочего режима и линии настройки системы противопомпажного регулирования и защиты смещают на эту величину. Вызов сигнала возникновения вращающегося срыва осуществляют путем снижения частоты вращения компрессора для сетей с характеристикой, близкой к горизонтальной, и/или путем прикрытия дросселя для сетей с характеристикой, близкой к дроссельной. Сигнал по вращающемуся срыву, возникающий внутри интервала времени между его вызовами, используют для срабатывания системы противопомпажного регулирования и защиты. 2 з.п. ф-лы, 1 ил.
| СПОСОБ СТАБИЛИЗАЦИИ ЗАПАСА ГАЗОДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИ ТУРБОКОМПРЕССОРА | 1995 |
|
RU2098669C1 |
| Способ защиты турбокомпрессора от помпажа | 1983 |
|
SU1201555A1 |
| Способ обнаружения предпомпажного режима центробежного компрессора | 1979 |
|
SU773314A1 |
| US 4595340 A, 17.06.1986 | |||
| ЭНЕРГОЭФФЕКТИВНОЕ ОТАПЛИВАЕМОЕ ЗДАНИЕ С ТЕПЛИЦЕЙ | 2015 |
|
RU2606891C1 |
| GB 1522975, 31.08.1978. | |||

