Область техники, к которой относится изобретение
Настоящее изобретение относится к способу и оборудованию для установки якорей в заданных точках при различных формациях морского дна и для соединения и отсоединения установленных якорей от якорных линий, предназначенным для удовлетворения потребности в постановке на якорь плавучих сооружений независимо от глубины.
Уровень техники
В случаях, когда по различным причинам необходимо удерживать объект, плавающий на поверхности моря, в заданном положении, применяется якорь. Он представляет собой тяжелую конструкцию, которая опускается на морское дно будучи связанной тросом с плавучим объектом. Благодаря своей специальной форме якорь имеет возможность закрепиться на дне моря или вступить с ним во фрикционный контакт. Например, судно, двигатель которого вышел из строя, воспользуется простым традиционным якорем обычного типа. Аналогичный способ постановки на якорь применяется в отношении судов, стоящих на рейде в ожидании возможности подойти к причалу, и т.д. Требования по точности установки в заданное положение в подобных обстоятельствах минимальны, при этом судно обычно может свободно разворачиваться на 360° вокруг точки закрепления в зависимости от состояния течения и направления ветра.
Плавучие объекты, такие как морские буровые платформы, суда производственного назначения и аналогичные объекты, например, используемые в нефтяной и газовой промышленности, должны отвечать совершенно другим и более жестким требованиям в отношении точности постановки на якорь. Соответственно возрастают и требования к якорным устройствам. Эти требования обусловлены, в частности, использованием погружаемых трубопроводов, которые проходят приблизительно по прямой линии от уровня платформы вертикально через слой воды и вглубь до нефтеносных и газоносных слоев в земной коре.
Современная технология обеспечивает точную установку систем такого рода на глубины приблизительно до 700 м благодаря применению якорей, связанных с цепными якорными линиями, отходящими от платформы вниз и наружу. Обычно используются от восьми до шестнадцати свободно провисающих цепей, на которых закреплены пластинчатые якоря или якоря с лапами, стоимость которых составляет от 0,5 до 2 млн норвежских крон. Обычно указанные цепи, длина которых примерно в 4-6 раз превышает расстояние до дна, расходятся радиально от центра, которым является платформа. К внешнему концу цепи прикрепляется якорь с лапами, который сконструирован таким образом, чтобы он мог входить в морское дно с тем, чтобы обеспечить взаимодействие с дном, когда его протаскивают по дну в направлении платформы посредством кораблей, устанавливающих этот якорь и/или посредством собственного привода, установленного на платформе.
Непостоянство состояния морского дна и ограниченные инспекционные возможности ограничивают уверенность в надежной и долговременной постановке на якорь в периоды экстремальных нагрузок. Это приводит к необоснованно жестким требованиям, которые обычно задаются в отношении количества якорных точек. С учетом среди прочих факторов их высокой стоимости всегда необходимо предпринимать попытки подъема этих якорей для повторного использования.
Постановка на якорь с использованием провисающих цепей позволяет платформе дрейфовать под действием ветра и течений в горизонтальной плоскости в любом направлении относительно центрального положения в пределах, соответствующих смещению до 5° от вертикальной плоскости.
Еще одним средством крепления к морскому дну является самозасасывающийся якорь. Он имеет металлический корпус в форме колокола, открытый книзу в направлении морского дна. С помощью специального, дистанционно управляемого устройства (ДУУ), управление которым осуществляется с поверхности моря, из внутренней полости корпуса якоря откачивают воду для того, чтобы дифференциальное гидростатическое давление, достаточно высокое на используемых глубинах, обеспечило всасывание/вдавливание корпуса в дно и закрепление его на дне. Данное средство обеспечивает крепление, которое легче контролировать и инспектировать и которое благодаря этому позволяет получить существенно более жесткое закрепление с меньшим провисанием цепей.
Еще один дистанционно реализуемый способ закрепления на больших глубинах заключается в забивании в дно с помощью гидравлического молота полых труб, которые в результате закрепляются на дне.
Крепление к дну посредством бурения позволяет опускать в скважину полые трубы, служащие якорями, с заполнением полостей внутри и вокруг опускаемого цилиндра цементом. После этого появляется возможность прикрепить цепь к верхней и вершинной (выступающим из дна) частям якорей. Цепь может также крепиться к центральной части якорей, погруженной в донный слой, с тем, чтобы использовать силы сопротивления, возникающие при протягивании объекта через окружающую его массу.
Применяется также натяжное вертикальное якорное крепление, когда якоря на дне вместе с прикрепленными к стойкам вертикальными цепями действуют в качестве противовесов плавучести платформы, обеспечивая ее погружение в воду настолько, чтобы достичь стабилизирующего эффекта.
Провисающие цепи занимают значительные пространства вокруг платформы в воде и на морском дне. Нежелательно, чтобы подобные цепи пересекали нефтепровод и/или другие сооружения. Провисающие отрезки металлических цепей весьма тяжелы, в том числе потому, что длина каждой такой цепи в 4-6 раз превышает глубину моря, Например, при глубине 300 м суммарная длина цепей для платформы, использующей 10 цепей по 1800 м каждая, составит 18000 погонных метров. Если масса цепи составляет 160 кг/погонный м, то общая масса цепей будет равна 2900 т. Если (теоретически) постановка на якорь такой платформы осуществлялась бы при глубине 3000 м, суммарная масса цепей равнялась бы 29000 т.
На таких глубинах необходимо применять другие варианты якорных линий, например стальной трос, вес которого составляет одну треть от веса цепи. Однако 3000 м троса соответствующего калибра имеют массу около 50 т и образуют катушку огромного размера. Составные системы на основе тросов также очень громоздки, однако подобные тросы в подводном положении почти невесомы.
Таким образом, типичная якорная линия может быть собрана с использованием стального троса или стальной цепи большого калибра в ее нижней части с якорем для того, чтобы обеспечить погружение, из плавучего отрезка кабеля или цепи. Отрезок между нижней и верхней частями троса/цепи образован канатом из композитного волокна, сплесневание осуществляется посредством специальных сращивающих модулей.
Способ установки якорей в заданных точках при различных формациях морского дна и для соединения и отсоединения установленных якорей согласно настоящему изобретению разработан преимущественно для применения на больших глубинах, в условиях высокого гидростатического давления. Это делает весьма трудным, если не невозможным (в том числе и из экономических соображений), использование известной технологии, разработанной для умеренных глубин, в части передачи основных усилий, весов и размеров якорных цепей, требований к точности установки, контроля и т.п.
Известное оборудование, которое применяется при проведении подобных подводных операций, представляет собой дистанционно управляемое устройство (ДУУ) с генератором мощности и гидравлическим насосом, которое создает крутящий момент, тяговое усилие и высокое давление жидкости, необходимые для обеспечения операций гидроразмыва и инжектирования.
ДУУ выполняется таким образом, что способно самостоятельно закрепляться на каркасе установки. Это необходимо для того, чтобы ДУУ в процессе выполнения операций, связанных с вращением, например ввинчивания полых цилиндрических резьбовых якорей или бурения в морском грунте, было способно противостоять вращающим усилиям или усилиям отдачи со стороны струй жидкости под большим давлением, которому оно подвергается. Установка подобного генератора мощности именно на каркасе установки обусловлена тем, что работа на больших глубинах существенно усложняет передачу мощности с поверхности.
В патентной литературе выявлены следующие публикации.
В документе NO № 803927 описан погружаемый бурильный молот, который действует с платформы под управлением с поверхности; опорой для молота служит каркас в форме усеченной пирамиды, который выступает над уровнем морского дна.
Документ NO № 952476 описывает способ погружения полых цилиндрических якорей в морское дно, согласно которому якоря вместе с соединительными компонентами присоединены к колонне, образованной якорями, уложенными друг на друга, так что собственный вес этой колонны способствует поочередному погружению якорей в дно. Данные якоря связаны между собой отрезками цепи, длина которых задает расстояние между положениями якорей.
В документе FR № 2444755 описан полый инжектор со спиральной нарезкой, предназначенный для закрепления и укрепления рыхлых масс благодаря тому, что после того, как он ввинчен в рыхлый грунт, в него можно инжектировать твердеющий материал типа жидкого бетона. Это устройство, очевидно, предназначено для применения на поверхности и само по себе не выполняет функцию якоря.
В документе SE № 350556 описано бурильное устройство, работающее по методу гидроразмыва и закрепляемое в нижней части сваи. Данное устройство в процессе забивания сваи в поверхность земли облегчает погружение сваи в рыхлую массу земли воздействуя на нее наклонными струями воды под высоким давлением.
Документ PCT/WO № 95/20075 описывает самозасасывающийся якорь в форме колокола, сочлененный и соединенный с одним или более контейнеров, внутри которых создано пониженное давление путем откачки воды на большой глубине. За счет повторного быстрого соединения и разъединения внутренней полости самозасасывающегося якоря с полостями контейнеров обеспечиваются скачкообразные изменения давления в его полости, благодаря чему якорь углубляется в морское дно под действием дифференциального гидростатического давления. Функции устройства, способствующего погружению самозасасывающего якоря, в данном случае выполняются контейнером (контейнерами), в котором создано пониженное давление. Стандартный самозасасывающийся якорь состоит только из корпуса в форме колокола, который открыт книзу в сторону дна. Сначала из корпуса откачивают воду, в результате чего на него на больших глубинах действует высокое дифференциальное гидростатическое давление. Резкое приложение этого давления заставляет самозасасывающийся якорь погружаться в массу донного грунта.
В документе GВ № 2148968 описана система для установки якорей в заданных точках. Известная система содержит якорь (1), связанный с держателем якоря (5), несущее устройство (3, 7) для размещения с возможностью освобождения указанного держателя якоря и средства (4) погружения якоря. Способ установки якорей в заданных точках, описанный в указанном документе, включает операции установки с возможностью освобождения держателя якоря (5), соединенного, по меньшей мере, с одним якорем (1), в несущее устройство (3) погружения указанного якоря (1) в заданное положение под действием усилия погружения, создаваемого посредством средств (4) погружения якоря, до установки якоря на заданную глубину и освобождения указанного несущего устройства (3) от указанного держателя якоря (5).
В известном устройстве используется полый цилиндрический извлекаемый якорь, снабженный криволинейными рычагами, установленными под углом 90° к корпусу якоря с возможностью складываться при развороте наружу и вниз. Назначение якоря состоит в формировании бетонных оснований ниже уровня морского дна, после чего он вытаскивается наверх. При забивании якоря в морское дно рычаги складываются вдоль нижней части цилиндрического корпуса якоря, в том числе под действием окружающего давления. Однако при небольших подъемах и опусканиях якоря происходит развертывание рычагов наружу. Поскольку наружные части рычагов обращены вовнутрь, они оказывают воздействие на окружающие массы, сопротивление которых заставляет наружные части рычагов совершать колебания из свернутого положения в положение разворота под углом 90° к оси якоря. Операция забивания повторяется при наращивании новых полых звеньев несущего устройства, причем формируемая полость, вытянутая в продольном направлении, заполняется водой. Когда достигнуто нижнее положение, через полость вводят жидкий бетон. Извлечение якоря для повторного использования осуществляют путем его дополнительного опускания при подаче воды под высоким давлением. В результате окружающие массы действуют на рычаги, прижимая их к корпусу якоря. При осуществлении известного способа несущее устройство, а также держатель якоря располагаются под острым углом к вертикали.
Данное устройство может рассматриваться как средство повышения несущей способности грунта. Предполагается, что управление устройством осуществляется с поверхности, причем источник силы, используемой для забивания якоря, в указанном документе не описан. Известное устройство и реализуемый с его использованием способ практически непригодны для точной установки якорей на больших глубинах.
Наиболее близким аналогом настоящего изобретения является техническое решение, раскрытое в патентном документе US 4347802, из которого, в частности, известна система для установки якорей в заданных точках при различных формациях морского дна и для соединения и отсоединения установленных якорей от якорных линий, содержащая по меньшей мере один якорь; держатель якоря, связанный по меньшей мере с одним якорем; несущее устройство для размещения с возможностью освобождения упомянутого держателя якоря; средства погружения якоря в морское дно. При этом система дополнительно содержит погружное основание в форме каркаса с несколькими связанными между собой наклоненными вовнутрь стойками, образующими усеченную пирамиду, причем к верхним концам стоек прикреплены тросы для опускания погружного основания на морское дно; и контрольное оборудование, расположенное вместе с несущим устройством по вертикальной оси каркаса, для ввода держателя якоря, устанавливаемого вертикально в несущее устройство.
Из указанного документа также известен способ установки якорей в заданных точках при различных формациях морского дна, включающий операции установки с возможностью освобождения держателя якоря, соединенного по меньшей мере с одним якорем, в несущее устройство; погружения упомянутого якоря в морское дно в заданное положение под действием усилия погружения, создаваемого средствами погружения якоря, до установки якоря на заданную глубину; и освобождения несущего устройства от держателя якоря. При этом якорь устанавливают примерно в вертикальном положении в несущем устройстве, расположенном по вертикальной оси каркаса погружного основания, а указанное усилие погружения направляют приблизительно вертикально. Способ далее включает операции опускания погружного основания на морское дно в примерно заданное положение и подъема погружного основания после установки якоря на заданную глубину.
Сущность изобретения
Задача, на решение которой направлено настоящее изобретение, заключается в создании системы и способа для установки якорей в заданных точках при различных формациях морского дна, удовлетворяющих потребности в постановке на якорь плавучих сооружений независимо от глубины. Использование настоящего изобретения должно обеспечить более высокую точность позиционирования точек установки якорей и, следовательно, позволит применять якорные линии со значительно более вертикальной траекторией в воде, за счет чего обеспечится уменьшение длины и веса якорных линий, а также сокращение площади морского дна, используемого при установке предварительно собранной системы.
Решение указанной задачи достигается созданием первого варианта системы для установки якорей в заданных точках при различных формациях морского дна и для соединения и отсоединения установленных якорей от якорных линий. Система согласно настоящему изобретению содержит по меньшей мере один якорь; держатель якоря, связанный по меньшей мере с одним якорем; несущее устройство для размещения с возможностью освобождения упомянутого держателя якоря; средства погружения якоря в морское дно; погружное основание в форме каркаса с вертикальной стойкой или несколькими связанными между собой вертикальными или наклоненными вовнутрь стойками, образующими усеченную пирамиду, причем к верхнему концу стойки или верхним концам стоек прикреплены тросы для опускания погружного основания на морское дно; контрольное оборудование, расположенное вместе с несущим устройством по вертикальной оси каркаса, для ввода держателя якоря, устанавливаемого вертикально в несущее устройство.
Основное отличие системы от ближайшего аналога заключается в том, что средства погружения якоря содержат один или более самозасасывающихся якорей, прикрепленных к нижней части каркаса, которые обеспечивают начальное погружение якоря в морское дно. Эти самозасасывающиеся якоря связаны со стойками каркаса, за счет чего также обеспечивается закрепление стоек, то есть каркаса погружного основания, на морском дне перед началом операции забивания якоря.
Средства погружения якоря, помимо самозасывающихся якорей, могут представлять собой один или более гидроцилиндров с подвижным в вертикальном направлении толкателем, выполненным с возможностью контактирования с верхней частью упомянутого якоря. В альтернативном варианте упомянутые средства погружения якоря содержат дистанционно управляемое устройство (ДУУ) с генератором мощности и/или питающий кабель, закрепляемые на каркасе посредством разъемного соединения и обеспечивающие посредством гидравлического двигателя и насоса создание эффектов гидроразмыва и инжектирования. Держатели якоря могут снабжаться соответствующими носителями для их доставки в рабочую зону, т.е. к погружному основанию. При этом имеется возможность устанавливать в несущее устройство в вертикальном положении держатели якорей различных типов либо перед опусканием каркаса на морское дно, либо после того, как он будет установлен на дне.
Общим признаком держателей якорей с якорями согласно настоящему изобретению является то, что при изменении местоположения плавучей платформы они должны быть оставлены в грунте морского дна за счет действия механизма освобождения, который разрывает соединение между якорем и якорной линией в зоне якорной скобы. Этот разрыв имеет место ниже уровня морского дна, если якорь не должен извлекаться, или на уровне морского дна с оставлением маркера, которым снабжен механизм освобождения, для обнаружения якоря в случае необходимости его повторного использования.
Для создания гидроразмыва держатель якоря может быть снабжен водяными соплами, ориентированными по существу в направлении морского дна.
Держатели якоря, применяемые в соответствии с изобретением, могут быть выполнены полыми или сплошными (массивными). Конструкция держателей и возможность наращивания в продольном направлении позволяют приспосабливать их к различным условиям морского дна. В предпочтительном варианте держатели также адаптированы к корпусу якоря круглого или прямоугольного сечения и снабжены окружающими их криволинейными пластинчатыми якорями, шарнирно закрепленными в своей верхней или нижней части и способными совершать колебательное движение с разворотом наружу и вверх или наружу и вниз с приходом в крайнее фиксированное положение, составляющее угол 90° с корпусом якоря, при приложении к нему усилия, направленного вверх или вниз.
Во втором варианте заявляемая система для установки якорей имеет дополнительные отличительные особенности, заключающиеся в том, что средства погружения якоря содержат герметично закрытый контейнер, в верхней части которого размещен гидростатический плунжер, прикрепленный с возможностью отсоединения к якорю. В нижней части контейнера имеется герметизирующий паккер, выполненный с возможностью открытия с разгерметизацией контейнера. Данные средства обеспечивают заглубление якоря в морское дно по завершении начального погружения, осуществляемого посредством самозасасывающихся якорей.
Изобретение также предлагает первый вариант способа установки якорей в заданных точках при различных формациях морского дна, включающий операции установки с возможностью освобождения держателя якоря, соединенного по меньшей мере с одним якорем, в несущее устройство; погружения упомянутого якоря в морское дно в заданное положение под действием усилия погружения, создаваемого средствами погружения якоря, до установки якоря на заданную глубину; и освобождения несущего устройства от держателя якоря. При этом якорь устанавливают примерно в вертикальном положении в несущем устройстве, расположенном по вертикальной оси каркаса погружного основания, а указанное усилие погружения направляют приблизительно вертикально. Способ также включает операции опускания погружного основания на морское дно в примерно заданное положение и подъема погружного основания после установки якоря на заданную глубину. Отличие предлагаемого способа от ближайшего аналога состоит в том, что средства погружения якоря содержат один или более самозасасывающихся якорей, прикрепленных к нижней части каркаса, которые выполнены с возможностью создания в них дифференциального гидростатического давления и реверсированного дифференциального гидростатического давления. Дифференциальное гидростатическое давление используют для дальнейшего опускания погружного основания, тем самым обеспечивая начальное погружение якоря в морское дно, а реверсированное дифференциальное гидростатическое давление используют для подъема погружного основания с обеспечением возможности разворота якоря в горизонтальное положение под действием тяговой силы со стороны якорной линии.
Способ может дополнительно включать операцию прикрепления якорной линии предпочтительно к центральной части якоря. В одном из частных случаев реализации способа согласно изобретению после установки якоря и отсоединения якорной линии от погружного основания погружное основание извлекают на поверхность для повторной загрузки и повторного использования или загружают его новым якорем под водой и перемещают в другое место для установки нового якоря.
Как упомянуто выше, средства погружения якоря могут содержать либо гидроцилиндры с толкателем, либо средства для создания эффектов гидроразмыва и инжектирования.
Во втором варианте способ установки якорей характеризуется тем, что якорь с держателем прикрепляют с возможностью отсоединения к гидростатическому плунжеру, размещенному в герметично закрытом контейнере, который в своей нижней части имеет герметизирующий паккер. Затем этот контейнер вертикально устанавливают в несущее устройство каркаса погружного основания, а после размещения погружного основания на морском дне осуществляют его дальнейшее опускание под действием дифференциального гидростатического давления, создаваемого в одном или более самозасасывающихся якорях, прикрепленных к нижней части каркаса. Усилие погружения обеспечивают посредством разгерметизации паккера и возможности перемещения плунжера вместе с держателем якоря и якорем под действием дифференциального гидростатического давления из положения внутри контейнера в наружное положение.
Перечень фигур чертежей
Настоящее изобретение далее будет подробно описано со ссылками на прилагаемые чертежи, на которых:
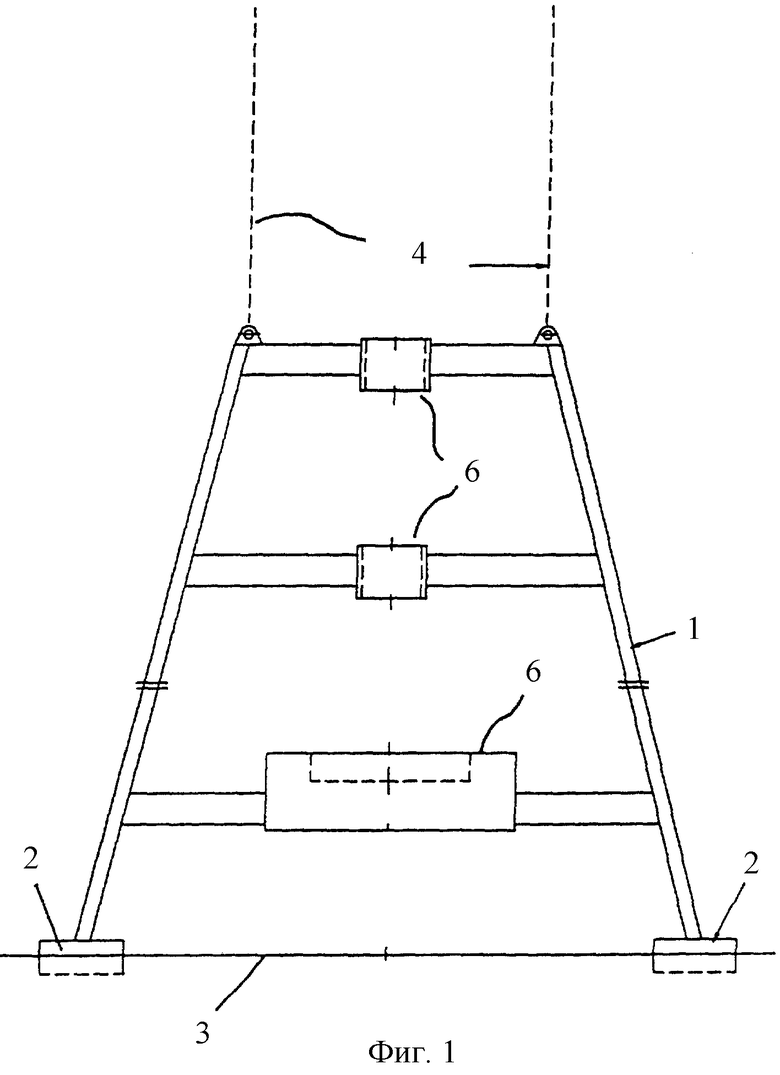
на фиг.1 показан общий вид погружной рамы, использованной в системе по настоящему изобретению;
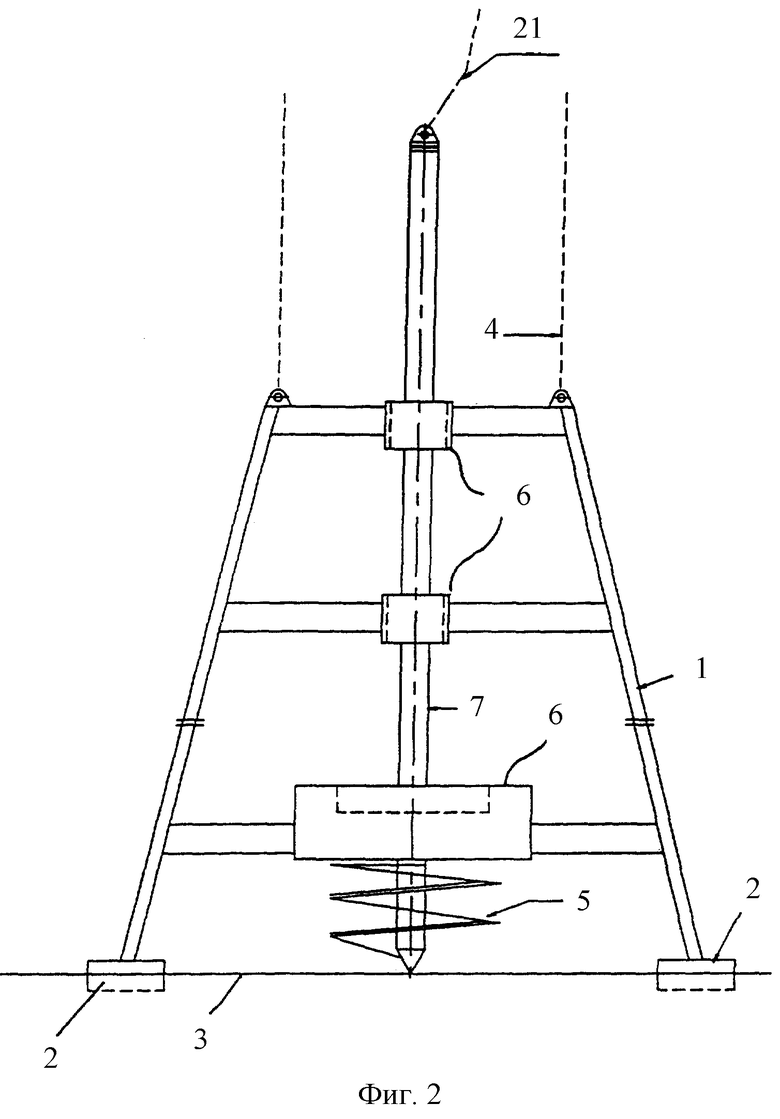
на фиг.2 показана погружная рама с якорем, установленным в несущее устройство, расположенное на раме;
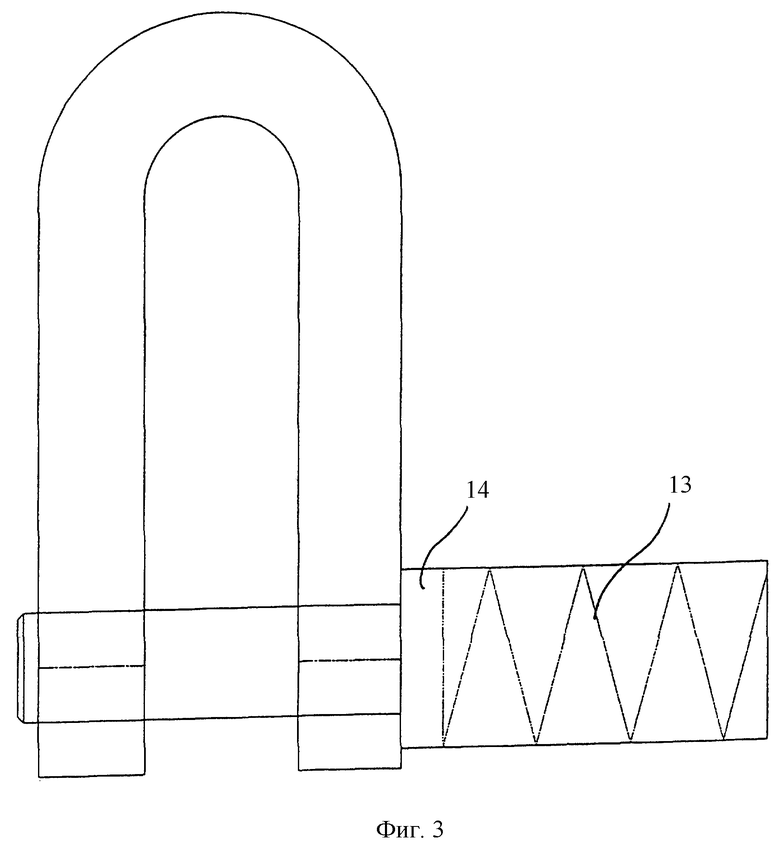
фиг.3 схематично иллюстрирует механизм освобождения, предусмотренный настоящим изобретением;
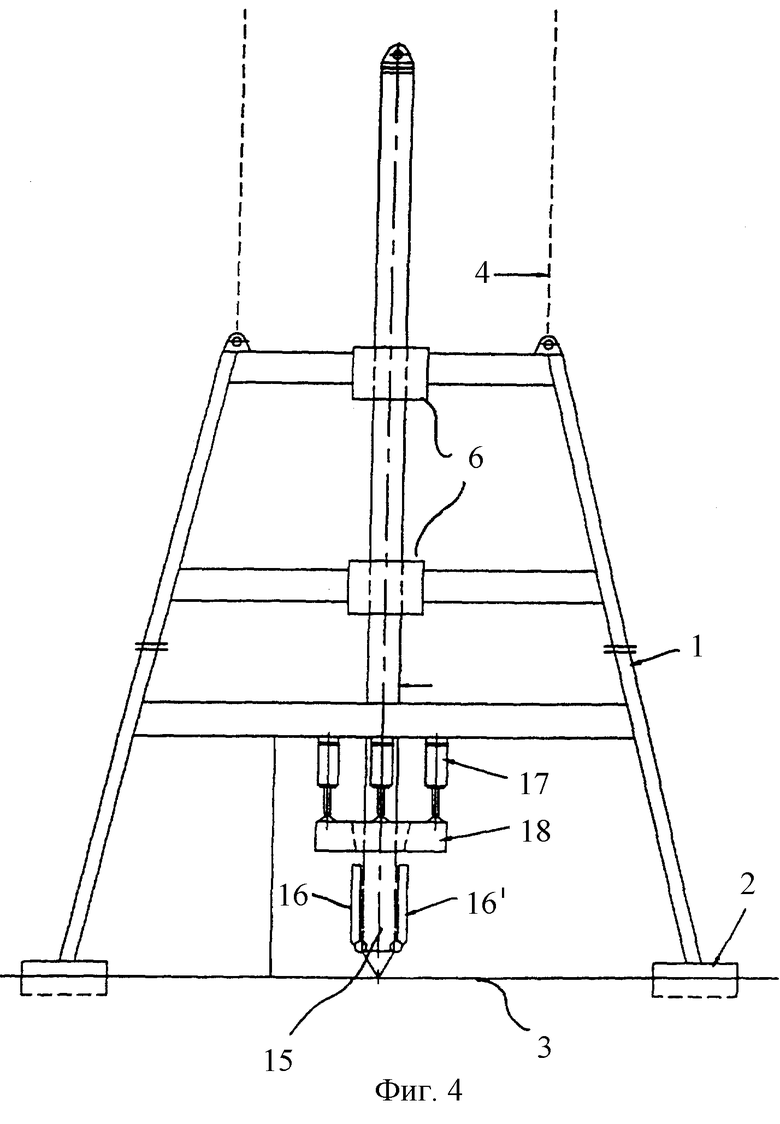
на фиг.4 представлена погружная рама с цельным цилиндрическим якорем и гидроцилиндрами;
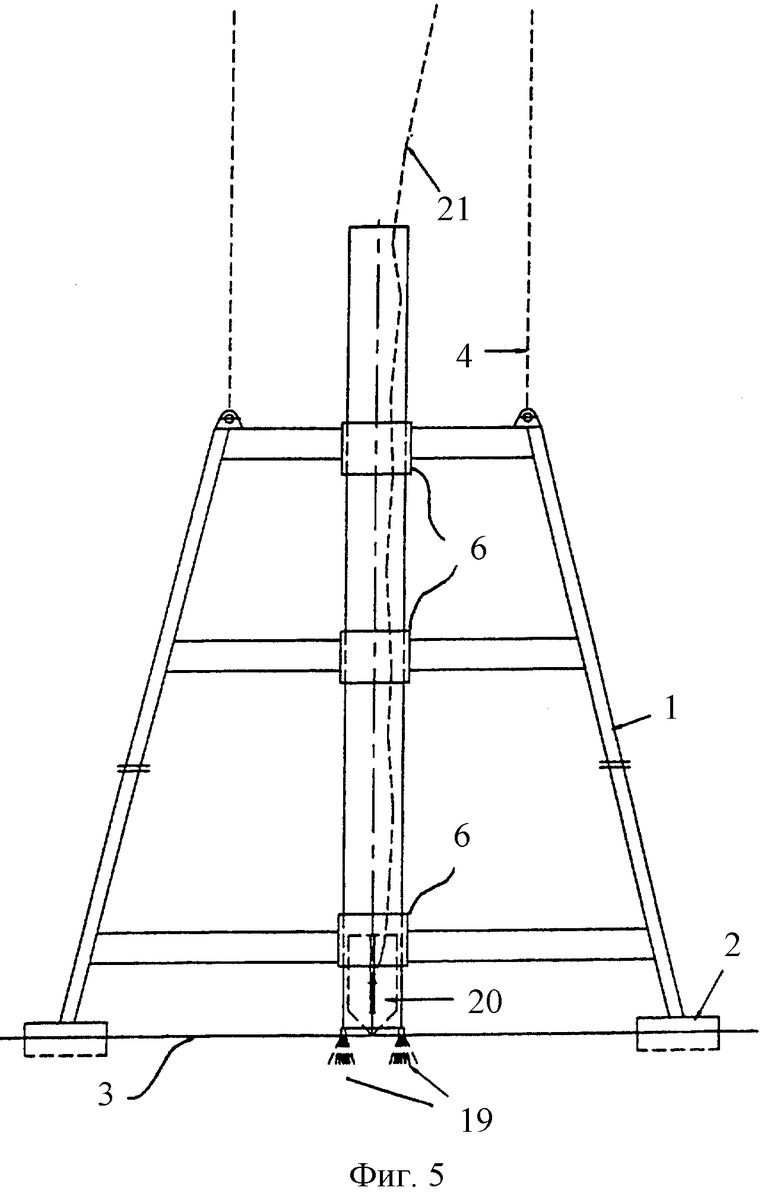
на фиг.5 показаны водяные сопла, установленные на погружной раме;
фиг.6 иллюстрирует использование гидроцилиндра в качестве средства погружения якоря.
Сведения, подтверждающие возможность осуществления изобретения
В соответствии с настоящим изобретением система для установки якорей в заданных точках при различных формациях морского дна предусматривает использование погружной рамы, представляющей собой каркас 1. Согласно предпочтительному варианту, представленному на фиг.1, каркас выполнен в форме усеченной пирамиды, состоящей из, например, четырех связанных между собой стоек (ног) 11, имеющих наклон вовнутрь. В других (не изображенных) вариантах каркас 1 может иметь одну или несколько вертикальных стоек. Погружное основание служит для погружения и удерживания держателей якоря, а также для контроля за их погружением. Как показано на фиг.1, к каркасу (в нижней части стоек 11) прикреплены один или более самозасасывающихся якорей 2 для того, чтобы закрепить его на морском дне 3 перед началом операции погружения якоря. К верхним концам стоек 11 прикреплены также стальные кабели 4, которые служат для опускания каркаса с поверхности на дно моря.
На каркасе 1 установлены контрольное оборудование и несущее устройство 6. На фиг.2, 4 и 5 показано, что несущее устройство расположено в центральной части каркаса 1 вдоль его вертикальной оси и приспособлено для установки в него держателей 7 якоря, адаптированных для работы с якорями 5, 15 20 различного типа.
Фиг.2 схематически иллюстрирует якорь 5 со спиральной резьбой, снабженный якорным тросом (якорной линией) 21, закрепленным в верхней части держателя 7 якоря, установленного вертикально в несущем устройстве 6 каркаса 1. Представленные на чертеже наружный диаметр и угол подъема спиральной резьбы якоря соответствуют конкретному примеру выполнения якоря рассматриваемого типа, а в общем случае их значения определяются на основе геотехнических данных о морском дне, позволяющих получить расчетные и предсказуемые характеристики сил сопротивления.
На фиг.4 представлен установленный вертикально в несущем устройстве 6 цельный цилиндрический якорь 15, соответствующий одному из предпочтительных вариантов выполнения системы по настоящему изобретению. Якорь 15 установлен в вертикальном положении в несущем устройстве 6 с помощью держателя 7 с цилиндрическим или квадратным сечением в зависимости от формы сечения якоря 15. К якорю 15 в его нижней части шарнирно прикреплены два криволинейных пластинчатых якоря 16 и 16'. В начальном положении (показанном на фиг.4) пластинчатые якоря 16 и 16' ориентированы вертикально, однако они выполнены с возможностью разворачиваться на 90° и устанавливаться в фиксированное развернутое положение относительно корпуса основного якоря при приложении к якорю усилия, направленного вертикально вверх. В зависимости от того, в верхней или нижней части пластинчатых якорей 16 и 16' расположены шарниры, соединяющие их с якорем 15, свободные концы этих якорей будут при этом перемещаться вниз или вверх.
Как показано на фиг.4, каркас 1 несет также гидроцилиндры 17 с подвижным в вертикальном направлении толкателем 18, который в своем исходном положении находится в контакте с верхней частью якоря 15.
На фиг.5 представлен полый металлический держатель 71 якоря, имеющий форму трубы цилиндрического или квадратного поперечного сечения и служащий для опускания на дно методом гидроразмыва с использованием ориентированных вертикально вниз водяных сопел 19 и инжектирования. Держатель 71 установлен вертикально в несущем устройстве 6 каркаса 1. Плоские пластинчатые якоря 20 устанавливаются внутри трубы квадратного сечения, образующей держатель 71. Аналогично пластинчатым якорям 16, 16' они установлены с возможностью разворота по диагонали на угол 90° для перехода в развернутое фиксированное положение на корпусе основного якоря 20. Из фиг.5 видно, что в данном варианте якорная линия 21, удерживающая держатель 71 с основным и пластинчатыми якорями в процессе опускания, закреплена в нижней части держателя 71.
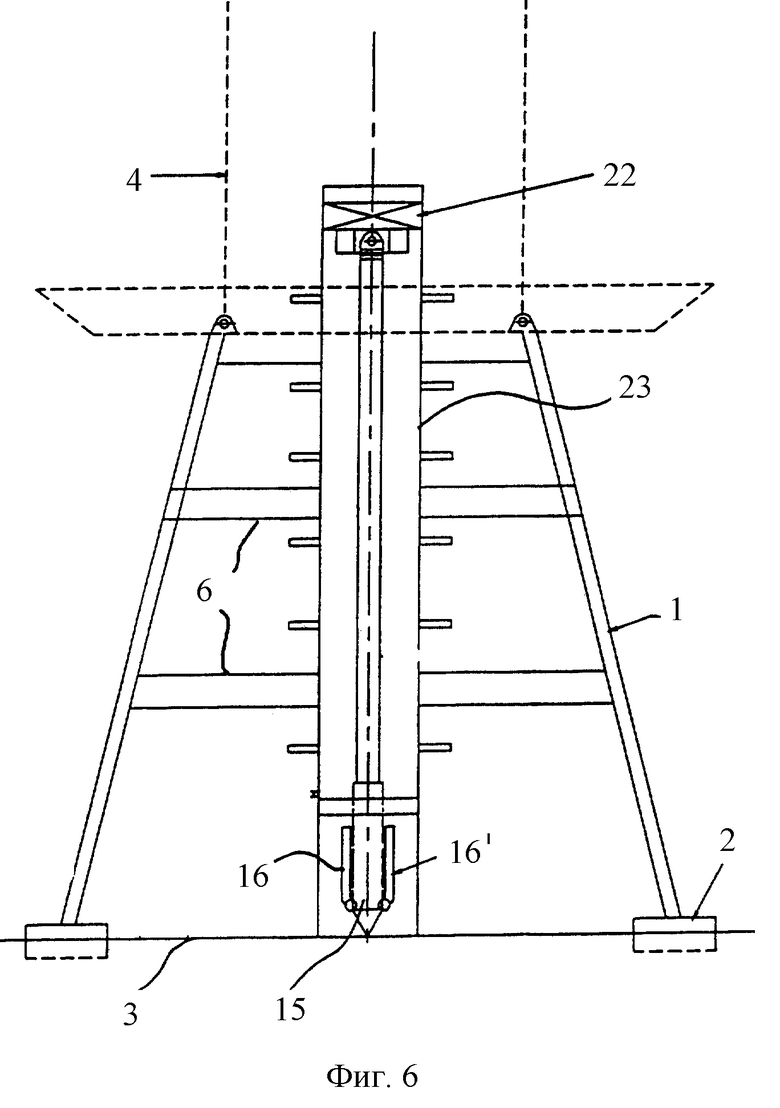
Фиг.6 иллюстрирует еще один предпочтительный вариант осуществления изобретения, в котором применен цилиндрический якорь 15, подобный представленному на фиг.4, с двумя пластинчатыми якорями 16 и 16'. Перед началом погружения в морское дно якорь 15 установлен вертикально в герметично закрытом цилиндрическом контейнере 23 в контакте с плунжером 22 гидроцилиндра. В нижней части или на нижней стороне цилиндрического контейнера 23 имеется герметизирующий паккер (не изображен), который может переводиться из исходного закрытого положения в открытое.
Якорь любого типа, применяемый в системе по настоящему изобретению, предпочтительно снабжен якорной скобой 12 (фиг.3) для прикрепления якоря к якорной линии 21. Согласно настоящему изобретению якорь предпочтительно снабжается также механизмом освобождения, входящим в якорную скобу 12 и содержащим пружину 13 и плунжер 14.
Первый альтернативный вариант осуществления способа по настоящему изобретению будет сначала описан на примере использования варианта системы, представленной на фиг.4. Этот вариант предусматривает выполнение следующих операций.
Когда погружная рама с установленными на ней контрольным оборудованием и несущим устройством 6, а также средствами погружения якоря (в частности, гидроцилиндрами 17 и толкателем 18) находится на поверхности, в несущее устройство устанавливают с возможностью последующего освобождения держатель 7 якоря, связанный с якорем 15. Держатель 7 якоря соединен также с якорной линией 21. После того как погружная рама приведена в положение, примерно соответствующее заданной точке установки якоря 15, ее опускают с поверхности на морское дно 3, удерживая на стальных кабелях 4. ДУУ может быть разъемно присоединено к каркасу 1 погружной рамы либо еще на поверхности, либо уже после опускания рамы на морское дно.
Затем с помощью насоса, управляемого от ДУУ, производят откачку воды из внутренних полостей самозасасывающихся якорей 2. В результате в них создается дифференциальное гидравлическое давление, действующее на самозасасывающиеся якоря 2 в направлении вертикально вниз. На больших глубинах, на которые рассчитана система по настоящему изобретению, дифференциальное давление оказывается достаточным, чтобы обеспечить погружение якорей 2 вместе с каркасом 1 в морское дно. Тем самым с помощью самозасасывающихся якорей 2 обеспечивается начальное погружение в морское дно якоря 15 со связанными с ним пластинчатыми якорями 16, 16'. После этого якорь 15 подвергают воздействию направленного примерно вертикально усилия погружения, развиваемого гидроцилиндрами 17 и прикладываемого к якорю 15 через толкатель 18. Под действием этого усилия якорь вдавливается/проталкивается в морское дно 3 до достижения заданного положение на заданной глубине в толще морского дна.
По завершении установки якоря гидростатическое давление в самозасасывающихся якорях 2 реверсируют, создавая тем самым усилие, направленное вертикально вверх. Под действием этого усилия обеспечивается подъем погружной рамы с морского дна. При этом в результате воздействия направленного вверх усилия со стороны якорной линии 21 происходит раскрытие пластинчатых якорей, т.е. их разворот на 90° с переходом в открытое горизонтальное положение.
Затем на погружную раму может быть установлен очередной якорь и она может быть переведена в заданное новое положение. Альтернативно, погружная рама может быть поднята на поверхность моря для установки на нее нового якоря.
При использовании модификации способа, предусматривающей использование модификации системы, представленной на фиг.5, реализуются все перечисленные операции. При этом, однако, окончательное погружение якоря производят путем гидроразмыва дна с помощью водяных сопел 19 и инжектирования держателя 71 с основным и пластнчатыми якорями 20 в морское дно.
Вариант осуществления способа, реализуемый с использованием системы, показанной на фиг.6, отличается от описанного выше методом формирования вертикального усилия погружения якоря.
После того, как погружная рама зафиксирована в морском дне с помощью самозасывающихся якорей 2, герметизирующий паккер контейнера 23 переводят в открытое положение и плунжер 22 гидроцилиндра получает возможность опуститься вместе с якорем 20 под действием дифференциального давления между внутренним объемом контейнера 23 и окружающим его пространством. Поскольку контейнер 23 опускается с поверхности при внутреннем давлении, равном 100 кПа, на глубину, например, 1000 м при 10000 кПа, 5000м при 50000 кПа и т.д., при снятии герметизирующего паккера обеспечивается выделение мощности, достаточной, чтобы обеспечить погружение якоря 20 на заданную глубину.
Якорные линии 21 соединяют якоря, установленные описанным способом, с соответствующим плавучим объектом. В случае необходимости переместить этот объект в другую точку производится освобождение якорных линий 21 с помощью соответствующих механизмов освобождения 13, 14, разрывающих соединение между якорем и якорной линией 21 в зоне якорной скобы 12, так что при отводе плавучего объекта якорь остается в морском дне.
Если повторное использование установленного якоря представляется целесообразным, механизм освобождения может быть снабжен маркером для облегчения обнаружения якоря.
Специалистам в данной области техники должно быть очевидно, что, помимо описанных выше, возможны и другие модификации и варианты осуществления настоящего изобретения, границы которого определяются только формулой изобретения.
Изобретение относится к плавучим транспортным объектам, в частности таким, как морские буровые платформы, и предназначено для их удержания на поверхности моря. Изобретение описывает варианты способа установки якорей плавучих объектов в заданных точках и выполнение якорной системы с точным позиционированием. Способ установки якорей, согласно которому размещают в несущем устройстве погружного основания с возможностью освобождения держатель якоря, опускают погружное основание на морское дно, погружают якорь в морское дно под действием направленного вертикально усилия погружения, освобождают несущее устройство от держателя якоря и поднимают погружное основание после установки якоря, при этом средства погружения якоря содержат один или более прикрепленных к нижней части каркаса самозасасывающихся якорей, которые выполняют с возможностью создания в них дифференциального гидростатического давления для погружения якоря в морское дно и с возможностью реверсирования этого давления для подъема погружного основания с обеспечением возможности разворота якоря из вертикального в горизонтальное положение под действием тяговой силы со стороны якорной линии. По второму варианту способа якорь с держателем прикрепляют с возможностью отсоединения к гидростатическому плунжеру, размещенному в герметично закрытом контейнере, который в своей нижней части имеет герметизирующий паккер, а усилие погружения обеспечивают посредством разгерметизации паккера и перемещения плунжера вместе с держателем якоря. Реализация изобретения обеспечивает более высокую точность позиционирования установки якорей при уменьшении длины и веса якорных линий. 4 н. и 11 з.п. ф-лы, 6 ил.
| US 4347802 A, 07.09.1982.SU 610914 A, 24.05.1978.SU 1174532 A, 23.08.1985.SU 1623914 A1, 30.01.1991.GB 1481696 A, 03.08.1977.GB 1526934 A, 04.10.1978.GB 1552162 A, 12.09.1979.GB 1562075 A, 05.03.1980.FR 2423592 A, 21.12.1979. |

