Изобретение относится к области глубокого бурения и, в частности, представляет собой клиньевое устройство для захвата труб в роторе буровой установки.
Известен механизированный клиньевой захват [1], содержащий корпус с внутренней конусной расточкой, клиньевую обойму из сегментных дисков с конической опорной поверхностью и рабочей поверхностью с зубчатыми плашками, причем смещенные в вертикальном ряду диски обеспечивают полный охват трубы по окружности. Клинья направляются по наклонным штокам и перемещаются втулками, связанными с гидроцилиндрами.
Недостатками данной конструкции являются вероятность перекоса захватных дисков по высоте и повреждения ими труб, малый диапазон типоразмеров захватываемых труб, невозможность оперативного вращения колонны труб, захваченной клиньями.
Известно также техническое решение [2], защищающее устройство для захвата труб в роторе, включающее корпус со ступенчатой внутренней поверхностью, вкладыши под каждый клин, установленные на центраторе, клинья с плоскими опорными поверхностями, с плашками и шарнирными подвесками, планки с подроторным кольцом, к которым прикрепляются подвески клиньев, подъемный рычаг с роликами и приводом. Указанное устройство может быть принято за прототип заявляемого технического решения.
Прототип, решая задачи равномерного по высоте захвата труб в широком диапазоне их типоразмеров, оперативного вращения колонны труб, захваченной клиньями (сравнительно с указанным выше аналогом), обладает рядом существенных недостатков, на устранение которых направлено заявляемое техническое решение.
Одним недостатком прототипа является то, что участок зубчатой поверхности размещен над линией, проходящей через верхнюю точку наклонной опоры клиньев под углом, перпендикулярным к опоре, плюс угол трения поверхностей клина и вкладыша, и нормальные нагрузки на этом участке, не имея против себя опоры, перекашивают клинья и увеличивают напряжения в захватываемой трубе с последующим проскальзыванием, что приводит к быстрому износу зубчатой поверхности и шарнирных соединений.
Другим недостатком прототипа является ограничение грузоподъемности плашечных клиньев из-за упора плашек в изгибающийся нижний торец.
Третий недостаток прототипа - недостаточный охват зубчатой поверхностью тела трубы, что приводит к появлению между клиньями в трубе повышенных напряжений.
Четвертый недостаток прототипа - консольность верхней части клиньев, приводящая к тому, что захват трубы осуществляется лишь на половине длины клина.
Пятый недостаток прототипа - необеспечение гарантированного для захвата труб запаса хода клиньев.
В связи с изложенным, основной технической задачей, на решение которой направлено настоящее предлагаемое изобретение, является создание такого устройства для захвата труб в роторе буровой установки, которое позволило бы исключить проскальзывание труб при захвате клиньями и повышенные напряжения в трубе между клиньями, повысить грузоподъемность плашечных клиньев и всего устройства, обеспечить равномерность давления клиньев на трубу, а также гарантированный для захвата труб запас хода клиньев. При этом устройство должно захватывать в ограниченном проходном отверстии ротора основные типоразмеры труб.
Для решения поставленной задачи устройство для захвата труб в роторе включает корпус с выполненными в верхней его части силовыми внутренними радиусными выступами; размещенные в корпусе клинья с плашками и вкладыши под клиньями; центратор, подвески в прорези клиньев, планки привода, крестовину для долот. Зубчатая поверхность бесплашечных клиньев и плашек размещена ниже линии, проходящей через верхнюю точку наклонной плоской опоры клиньев под углом, перпендикулярным к опоре, плюс угол трения поверхностей клина и вкладыша, причем плашка в клине имеет двухступенчатую плоскую поперечную опору в радиальном направлении и осевую опору в верхней части клина под прорезью для подвески. Плашки и бесплашечные клинья выполнены с зазором между зубьями соседних клиньев при захвате трубы не более 0,9-1,1 толщины стенки захватываемой трубы. Бесплашечные клинья с зубчатой насечкой для труб больших диаметров выполнены с консольными боковыми выступами в верхней части, размещенными с вертикальным зазором, соответствующим ходу клиньев от захвата трубы до упора клиньев друг в друга, над силовыми внутренними радиусными выступами корпуса, а ширина нижней части зубчатой поверхности клиньев меньше просвета между силовыми внутренними радиусными выступами корпуса. Опорные под ось подвески боковые поверхности клиньев выполнены в зоне смещения оси захватываемой трубы в проходном отверстии центратора. Зазор между нижним концом опорной поверхности клиньев и центратором при захвате трубы соответствует ходу клиньев от положения захвата трубы до упора клиньев друг в друга.
Перечень чертежей:
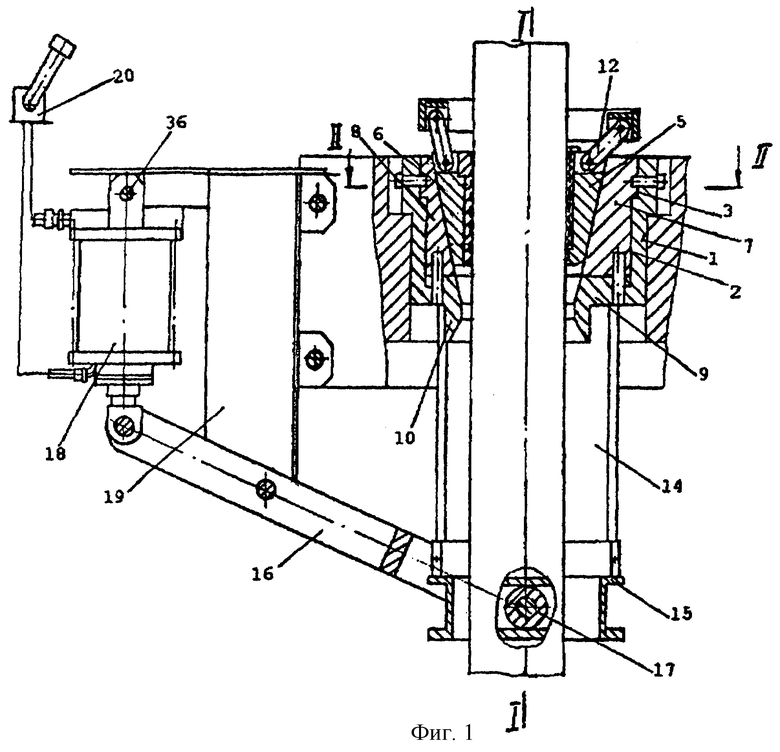
Фиг.1 - устройство для захвата труб в роторе в соответствии с настоящим предлагаемым изобретением - разрез по оси устройства, на котором справа от оси I-I показан захват насосно-компрессорных и бурильных труб с нижним опорным буртом под плашки в клиньях, а слева от оси I-I показан захват обсадных труб клиньями с двухступенчатой опорой плашек.
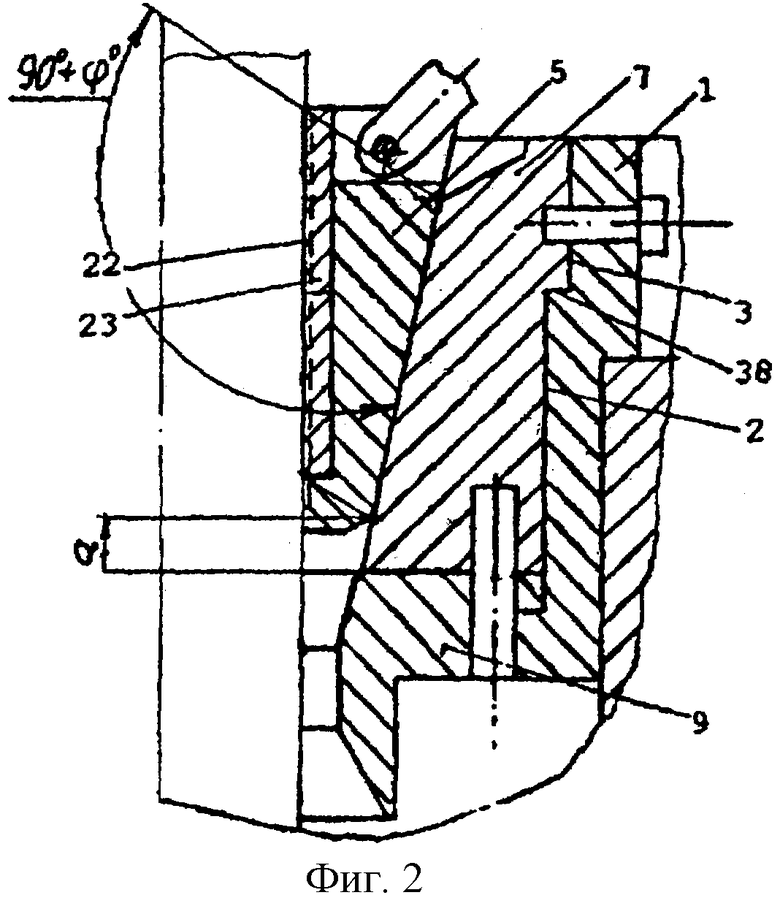
Фиг.2 - разрез по клиньям для насосно-компрессорных и бурильных труб с нижним опорным буртом под плашки (в увеличенном масштабе).
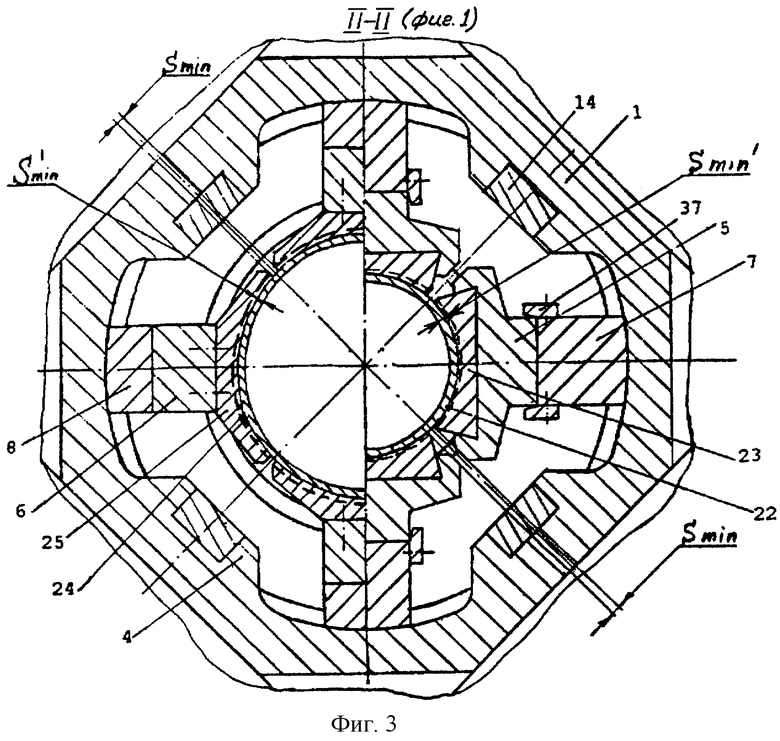
Фиг.3 - разрез по линии II-II, фиг.1.
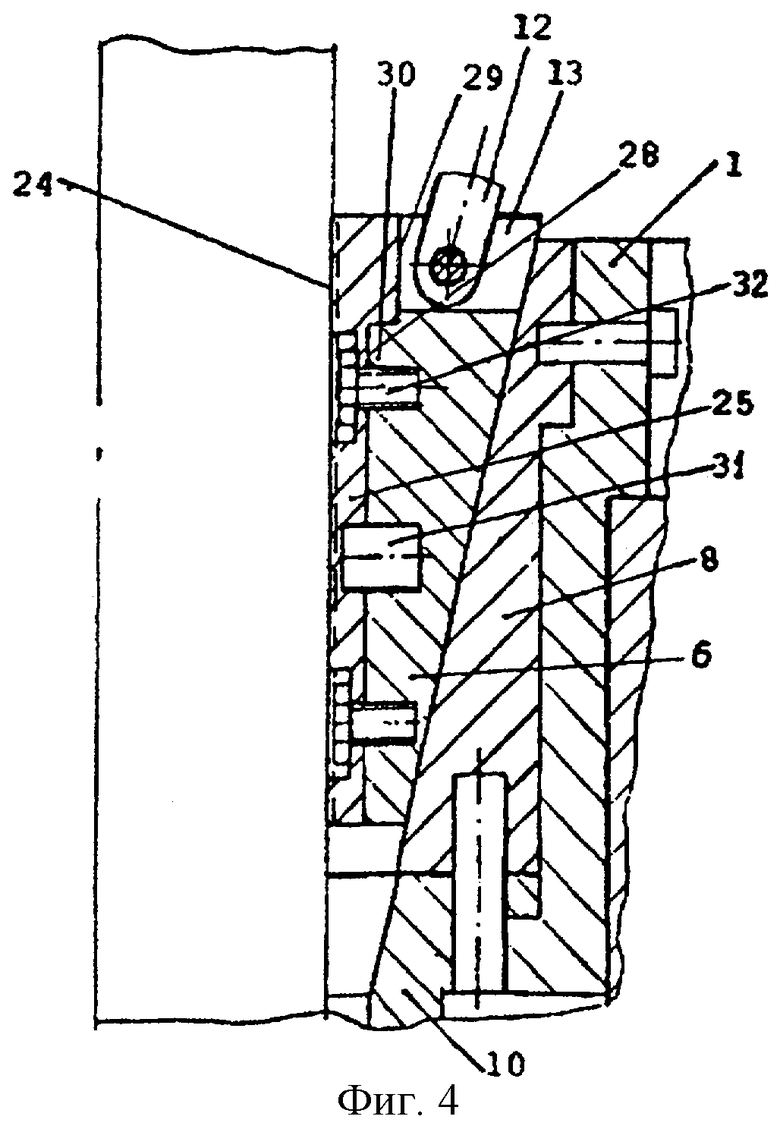
Фиг.4 - разрез по клиньям для обсадных труб средних диаметров с двухступенчатой опорой плашек (в увеличенном масштабе).
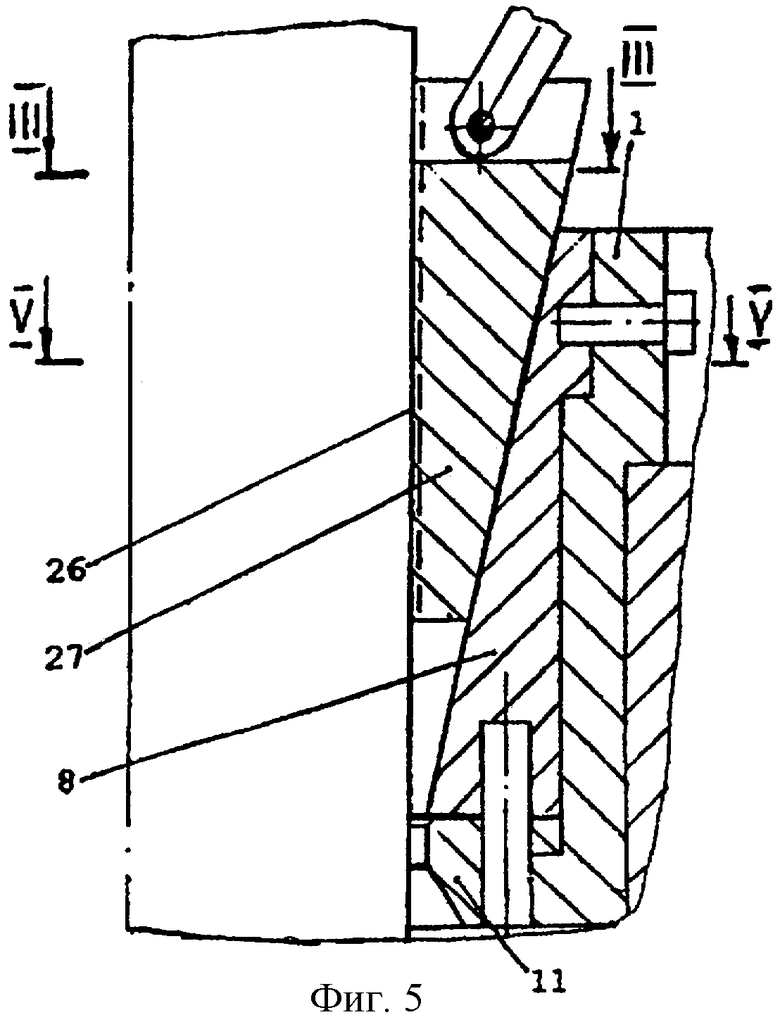
Фиг.5 - разрез по бесплашечным клиньям для обсадных труб больших диаметров (в увеличенном масштабе).
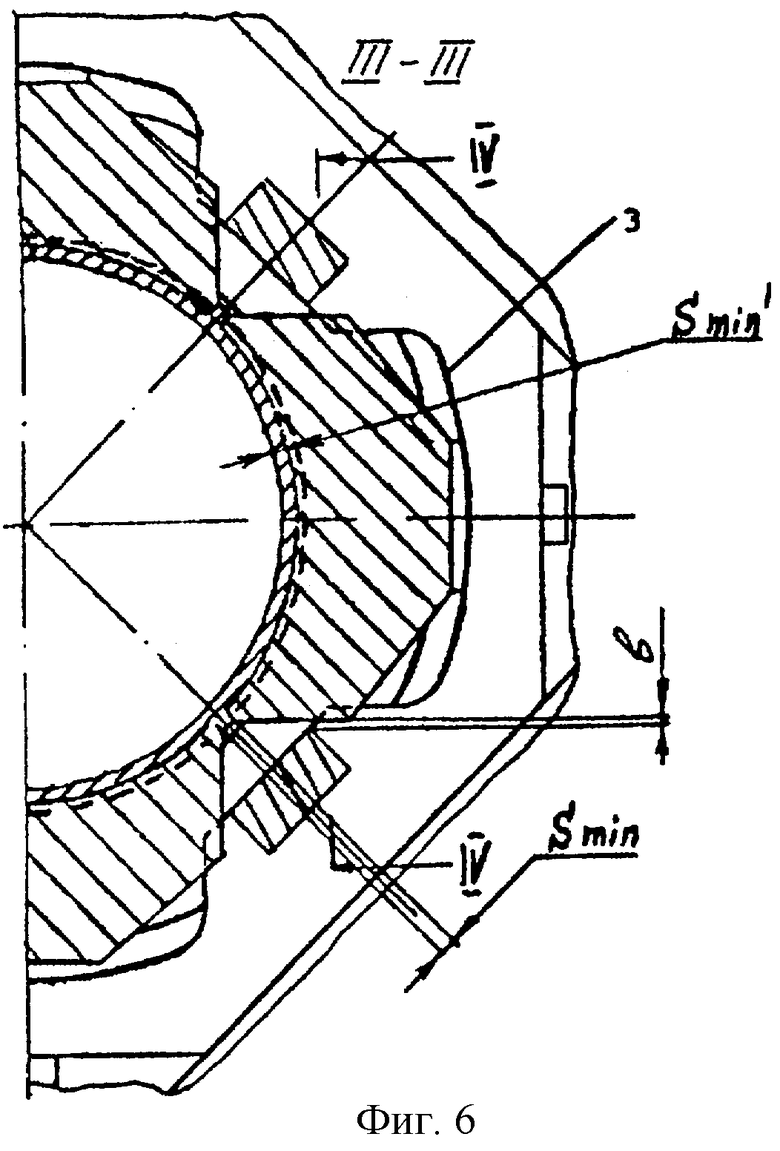
Фиг.6 - разрез по линии III-III, фиг.5.
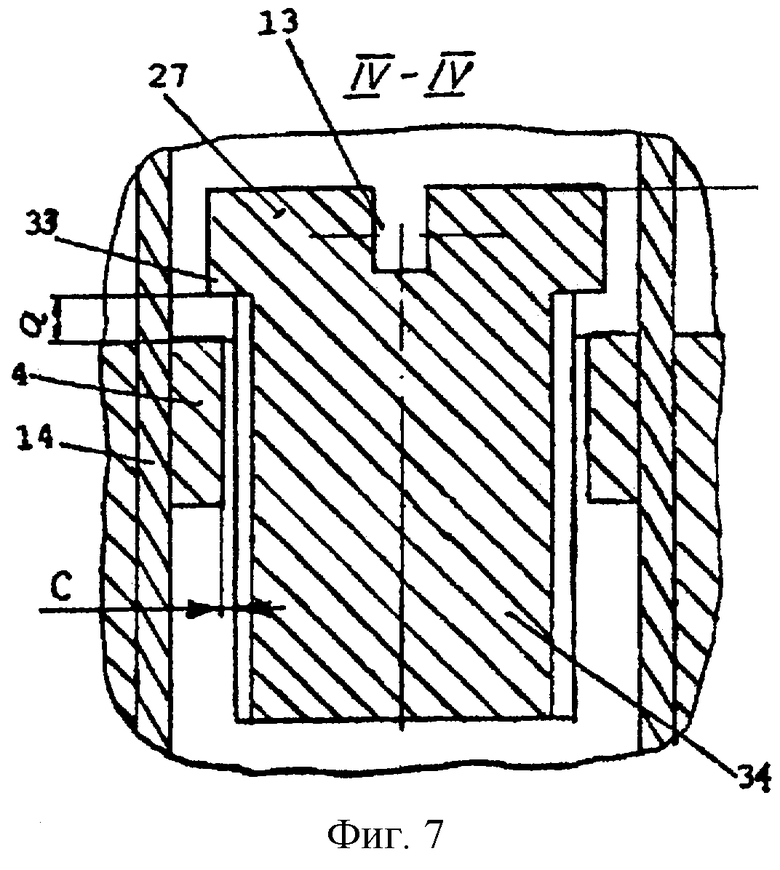
Фиг.7 - разрез по линии IV-IV, фиг.6.
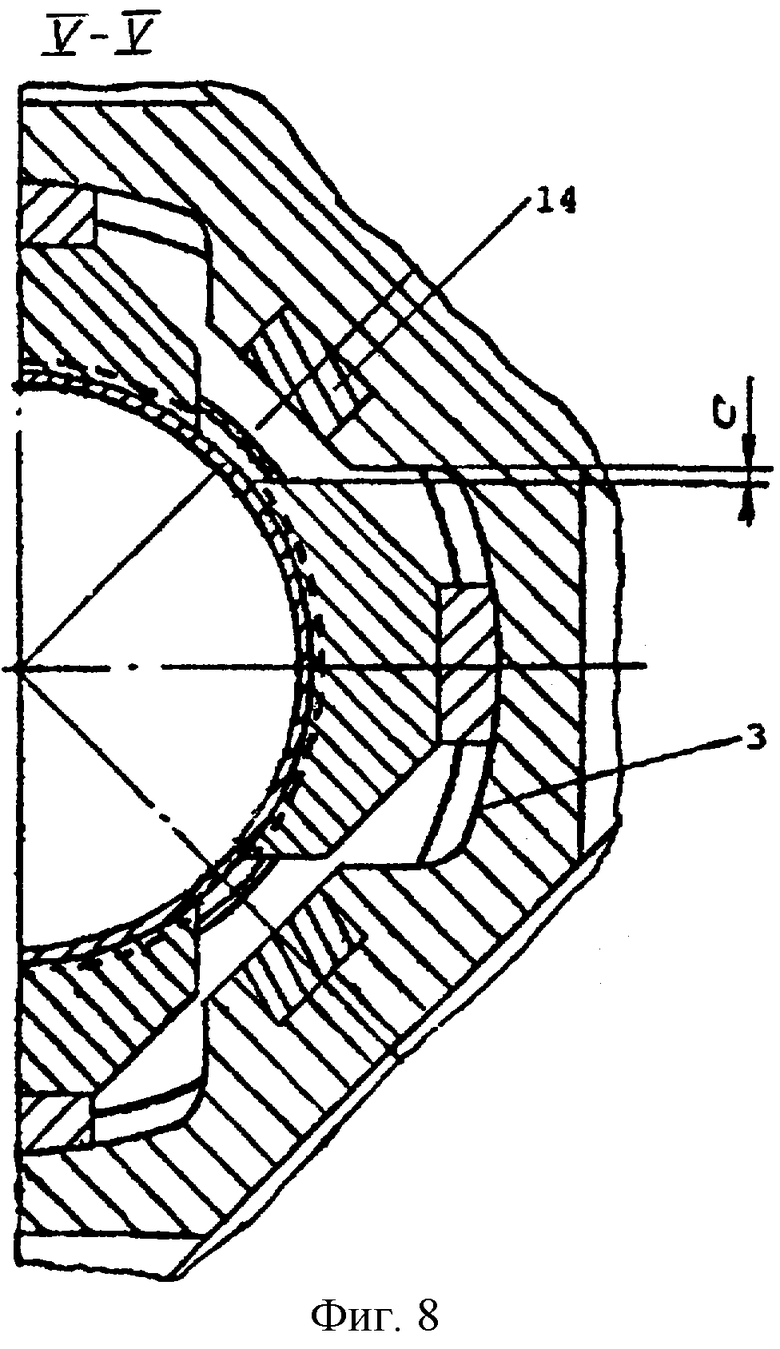
Фиг.8 - разрез по линии V-V, фиг.5.
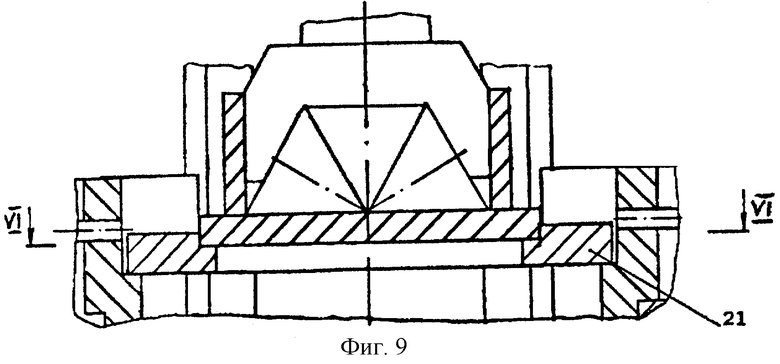
Фиг.9 - установка крестовины для долот.
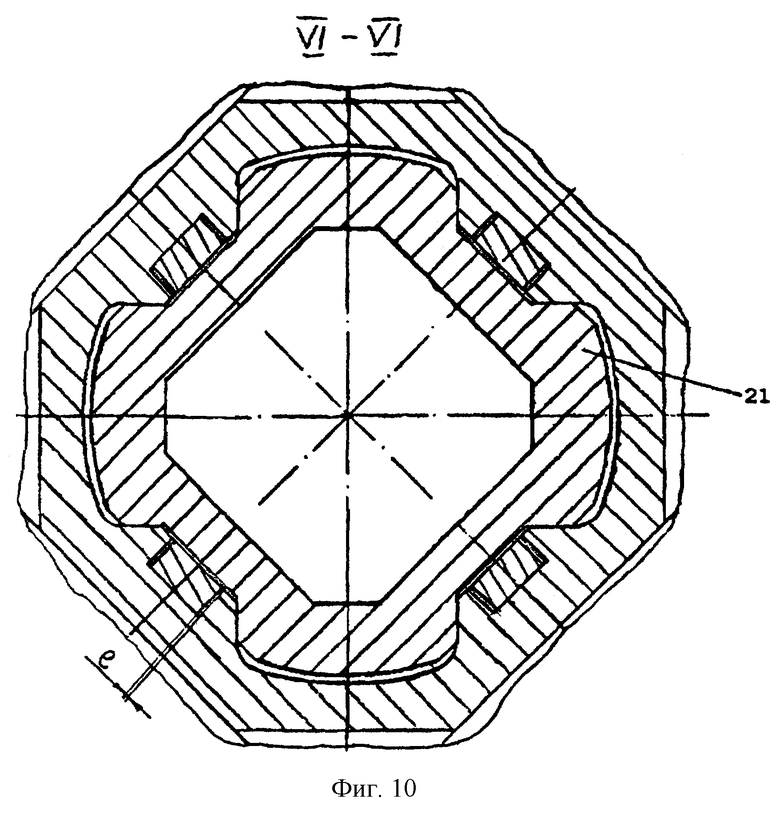
Фиг.10 - разрез по линии VI-VI, фиг.9.
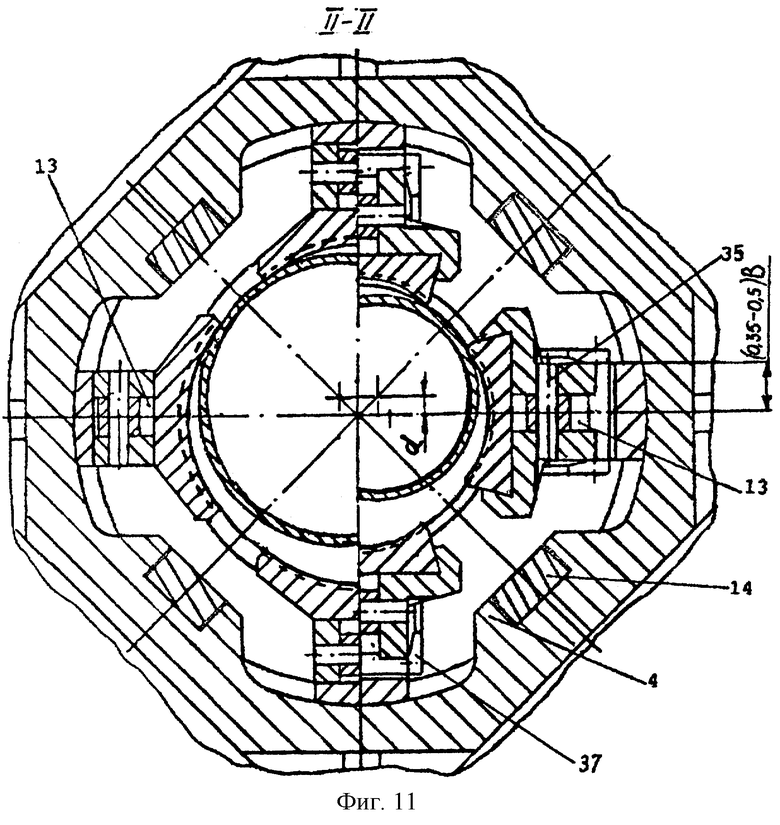
Фиг.11 - разрез по линии II-II при смещении захватываемой трубы в проходном отверстии центратора в процессе захвата трубы клиньями.
Устройство для захвата труб в роторе включает корпус 1 (фиг.1, 2, 3, 5) со ступенчатой цилиндрической внутренней поверхностью 2 и 3, с силовыми внутренними радиусными выступами 4 корпуса. В корпусе 1 размещены клинья 5 и 6, вкладыши 7 и 8 под клиньями, центраторы 9, 10, подвески 12 в прорезях 13 (фиг.11) клиньев 6, установленные в планках 14, подроторный привод клиньев, состоящий из кольца 15, соединенного под ротором с планками 14, подроторного рычага 16 с роликами 17, силового цилиндра 18 на кронштейне 19, прикрепленном к ротору, крана дистанционного управления 20. В корпус 1 при снятых клиньях и вкладышах с центратором устанавливается крестовина для долот 21 (фиг.9, 10).
Зубчатая поверхность 22 плашек, а также зубчатая поверхность 24 плашек 25 (фиг.3, 4) и зубчатая поверхность 26 бесплашечных клиньев 27 (фиг.5) размещены ниже линии, проходящей через верхнюю опору клиньев под углом, перпендикулярным к опоре, плюс угол трения поверхностей клина и вкладыша, что обеспечивает равномерную по высоте передачу распорных нагрузок при захвате труб и исключение перекосов клиньев при центрировании труб. Плашка 25 в клине 6 опирается на двухступенчатую плоскую поперечную опору в радиальном направлении, состоящую из плоскостей 28 и 29, и осевую опору 30 в верхней части клина 6 под прорезью 13 для подвески 12, что обеспечивает повышение грузоподъемности клиньев 6. Соединение плашки 25 с клином 6 осуществляется штифтовыми 31 и болтовыми 32 креплениями под осевой опорой 30. Зазор Smin между зубьями соседних клиньев 5, 6, 27 при захвате трубы клиньями не более 0,9-1,1 толщины S
В верхней части корпуса 1 над цилиндрической внутренней поверхностью 3 выполнены силовые внутренние радиусные выступы 4 (фиг.11). Верхняя часть бесплашечных клиньев 27 при захвате трубы размещена над силовыми внутренними радиусными выступами 4 корпуса 1 (фиг.6, 7, 8) с вертикальным зазором “а” между силовыми внутренними радиусными выступами 4 корпуса 1 и консольными боковыми выступами 33 клиньев 27, соответствующим ходу до стыковки клиньев 27, а остальная часть 34 клиньев 27 размещена между силовыми внутренними радиусными выступами 4 корпуса 1 с зазором “с” с двух сторон. Между консольными боковыми выступами 33 клиньев 27 и планками 14 обеспечивается зазор “в” с двух сторон.
Зазор “а” между нижней частью опорной поверхности клина 5 (фиг.2) и центратором 9 при захвате трубы, соответствующий ходу до стыковки клиньев 5, обеспечивает гарантированный захват труб.
Смещение “d” трубы в проходном отверстии центраторов 9, 10, 11 (фиг.11) не превышает 0,35-0,5 ширины “В” опорной поверхности клиньев 5, 6, 27, что обеспечивает центрирование труб клиньями без их перекоса. При этом ось 35 плотно установлена в подвеске 12, а длина оси соответствует ширине “В” опорной поверхности клиньев.
Работа устройства осуществляется следующим образом. Как и в прототипе, подъем и опускание клиньев осуществляется при подаче сжатого воздуха из пневмосистемы буровой установки с помощью дистанционного крана управления 20 в силовой цилиндр 18, качающийся на оси 36 кронштейна 19, прикрепленного к ротору. Силовой цилиндр 18 через рычаг 16 с роликами 17 поднимает или опускает кольцо 15 с планками 14, в которых установлены клинья с плашками 5, 6 или бесплашечные клинья 27. При опускании клиньев и захвате ими трубы между зубьями соседних клиньев и плашек устанавливается зазор Smin (фиг.3), а относительно опорной поверхности клиньев зубчатая поверхность устанавливается под углом 90°+ϕ (фиг.2), где ϕ - угол трения поверхностей клина и вкладыша. При этом в процессе центрирования колонны труб клиньями перед захватом трубы верхняя часть клиньев не перекашивается относительно оси трубы. Подвеска 12 с плотно установленной в ней осью 35 на ширине опорной поверхности клиньев, а также боковые ограничители 37 вкладышей 7 ориентируют ось клиньев по оси вкладышей.
После посадки колонны труб на клинья нижняя часть опорной поверхности клиньев устанавливается с зазором “а” относительно центратора (фиг.2), соответствующим ходу до стыковки клиньев, когда зазор между ними Smin уменьшается до нуля.
При спуско-подъемных операциях с насосно-компрессорными и бурильными трубами в корпус 1 устанавливаются вкладыши 7 с центратором 9, клинья с плашками 23.
При спуске обсадных колонн средних диаметров в корпус 1 устанавливаются вкладыши 8 с центратором 10, клинья 6 с плашками 25.
При спуске обсадных колонн больших диаметров в корпус 1 устанавливаются вкладыши 8 с центратором 11, клинья 27 с прорезью 13 под подвеску 12, проходящую через зубчатую поверхность 26, что обеспечивает подъем клиньев с необходимым зазором относительно трубы в центраторе 11 при вертикальном положении клина 27 и той же подвеске 12, что и при работе с другими клиньями.
При смене долота внутри корпуса 1 при снятых клиньях 5 и вкладышах 7 с центратором 9 между силовыми внутренними радиусными выступами 4 на опору 38 между ступенями цилиндрической внутренней поверхности 2 и 3 корпуса 1 устанавливается крестовина для долот 21. При передаче большого крутящего момента при отвинчивании долота сохраняется зазор “е” между планками 14 и силовыми внутренними радиусными выступами 4.
Возможность осуществления настоящего изобретения доказывается многолетними исследованиями и промышленными испытаниями, а также практикой широкого использования механизированных клиньевых захватов, встроенных в ротор.
Указанные выше технические признаки являются отличительными для заявляемого устройства и, отраженные в формуле изобретения, могут быть реализованы с помощью известных средств; они необходимы и достаточны для его осуществления, так как обеспечивают решение поставленной задачи - создание устройства для захвата труб в роторе, которое исключило бы проскальзывание при захвате труб клиньями и повышенные напряжения в трубе между клиньями и за счет этого позволило бы в несколько раз увеличить долговечность плашек, а также повысить грузоподъемность плашечных клиньев и всего устройства, обеспечить равномерность давления клиньев на трубу и гарантированный для захвата труб запас хода клиньев с захватом основных типоразмеров труб в ограниченном проходном отверстии ротора.
Источники информации
1. Патент США № 4715625, кл. 24-263, 1987 г.
2. Патент РФ № 2142551, кл. Е 21 В 19/10, 1999 г.
Изобретение относится к области глубокого бурения и, в частности, представляет собой клиньевое устройство для захвата труб в роторе буровой установки. Устройство включает корпус со ступенчатой цилиндрической внутренней поверхностью. Внутри корпуса имеются силовые выступы. В корпусе размещены клинья с плашками, вкладышами под клиньями, центратор. Подвески в прорезях клиньев установлены в планках. Имеются подроторный привод клиньев и крестовина для долот, устанавливаемая при снятых клиньях и вкладышах с центратором между силовыми выступами на опору между ступенями цилиндрической внутренней поверхности. Над цилиндрической внутренней поверхностью корпуса в верхней его части выполнены силовые внутренние радиусные выступы. Зубчатая поверхность плашек и бесплашечных клиньев размещена ниже линии, проходящей через верхнюю точку наклонной плоской опоры клиньев под углом, перпендикулярным к упомянутой плоской опоре, плюс угол трения поверхностей клина и вкладыша. Плашка в клине опирается на двухступенчатую плоскую поперечную опору в радиальном направлении и осевую опору в верхней части клина под прорезью для подвески, со штифтовыми и болтовыми креплениями плашки под осевой опорой. Зазор между зубьями соседних клиньев при захвате трубы клиньями не более 0,9-1,1 толщины стенки захватываемой трубы. Бесплашечные клинья в верхней части размещены над силовыми выступами корпуса, выполненными между планкой и крестовиной для долот с вертикальным зазором между выступами клиньев и силовыми выступами в корпусе при захвате трубы, соответствующим ходу до стыковки клиньев, а остальная часть клиньев размещена между силовыми выступами внутри корпуса. Зазор между нижней частью опорной поверхности клина и центратором при захвате трубы соответствует ходу до стыковки клиньев. Смещение трубы в проходном отверстии центратора не превышает 0,35-0,5 ширины опорной поверхности клиньев. Технический результат: исключено проскальзывание труб при захвате клиньями, что приводит к многократному увеличению долговечности плашек; снижены напряжения в трубе между клиньями; повышена грузоподъемность плашечных клиньев и всего устройства; обеспечена равномерность давления клиньев на трубу; гарантирован для захвата всех основных типоразмеров труб запас хода клиньев в ограниченном проходном отверстии ротора. 3 з.п. ф-лы, 11 ил.
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ТРУБ В РОТОРЕ | 1997 |
|
RU2142551C1 |
| Устройство для захвата труб в роторе | 1978 |
|
SU768931A1 |
| Устройство для захвата в роторе бурильных труб | 1978 |
|
SU768932A1 |
| US 3472535 A, 20.10.1967 | |||
| АБУБАКИРОВ В.Ф | |||
| и др | |||
| Буровое оборудование | |||
| Справочник | |||
| Т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| - М.: Недра, 2000, с 188-191. | |||

