Изобретение относится к области электротехники, а более конкретно к конструкции электромагнитных приводов.
Известен ряд конструкций электромагнитных приводов, срабатывающих при импульсном питании и удерживаемых в рабочем положении за счет встроенных постоянных магнитов, механических защелок, управляемых электромагнитами, и т.д. (Прижиалковский А.Л., Щучинский С.Х. Электромагнитные клапаны. - Л.: Машиностроение 1967, с. 103).
Такие приводы достаточно сложны как по конструкции, так и по схеме управления. В известном импульсном реверсивном электромагнитном приводе (патент США №4422060, 1983), имеющем спаренные электромагниты с двумя катушками, общий якорь со штоком и встроенным в якорь постоянным магнитом, который является фиксирующим элементом якоря в одном из его рабочих положений, реверсирование осуществляется за счет изменения направления тока в катушках.
Недостатком такой конструкции является наличие двух катушек и ее усложнение за счет наличия встроенного в якорь постоянного магнита.
Задачей данного изобретения является упрощение конструкции, а также уменьшение массогабаритных показателей.
Это достигается за счет того, что магнитная система импульсного реверсивного электромагнитного привода, содержащего якорь со штоком, связанным с нагрузкой, имеет одну катушку и два полых стопа, расположенных по обе стороны катушки с размещенными внутри них подвижными сердечниками, отжимаемыми пружинами в крайние положения так, что торцы подвижных сердечников шунтируются магнитно стопами от потока катушки, а торец якоря в одном из рабочих положений находится у торца одного из подвижных сердечников за счет фиксирующего элемента в виде перекидной пружины.
Реверсирование привода осуществляется при очередной подачи импульса тока в катушку.
Перекидная пружина привода относительно своего нейтрального положения (нулевое усилие на шток) может иметь как симметричную характеристику, так и несимметричную.
Предложенный импульсный реверсивный электромагнитный привод может найти весьма широкое применение в различных устройствах: электромагнитных клапанах, контакторах, реле, различного рода переключателях и т.д., и т.п.
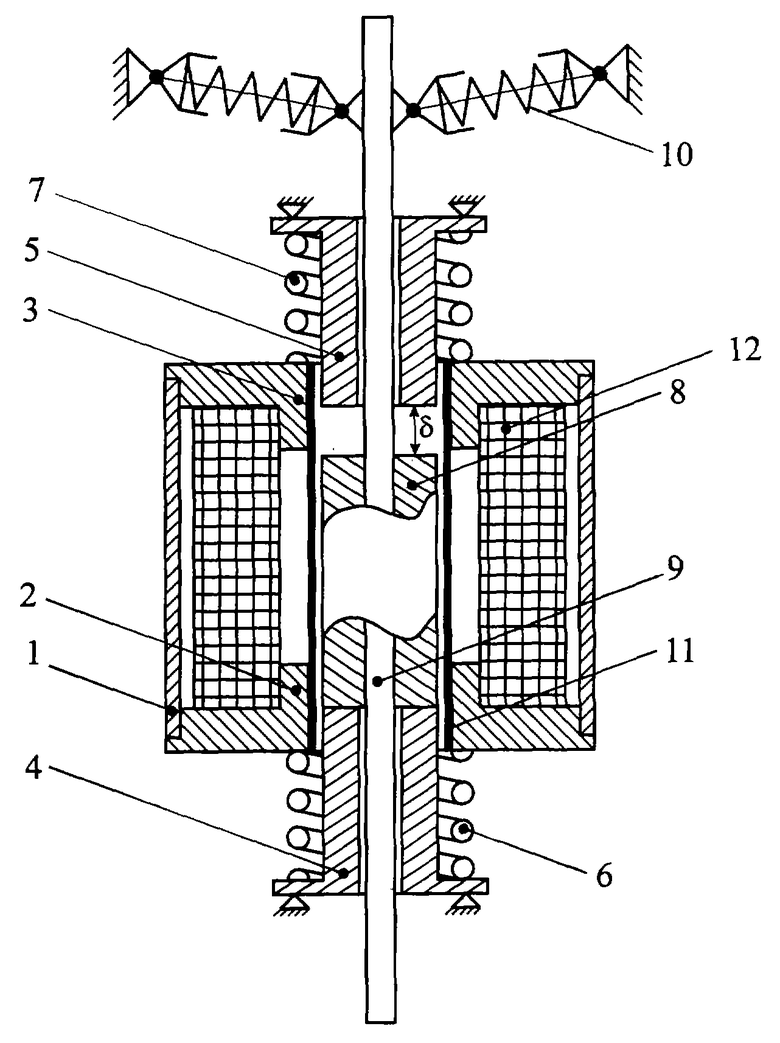
Сказанное поясняется чертежом, где показана предлагаемая конструкция электромагнитного привода.
Неподвижная часть магнитопровода 1 имеет два полых стопа 2 и 3, внутри которых размещены подвижные сердечники 4 и 5, отжимаемые в свои крайние положения соответственно пружинами 6 и 7. Якорь 8 связан с нагрузкой через шток 9, проходящий через отверстия внутри подвижных сердечников. На шток 9 воздействует перекидная пружина 10, являющаяся фиксирующим элементом якоря 8 в данном рабочем положении, указанном на чертеже. Перемещения якоря 8 и подвижных сердечников 4 и 5 происходят внутри направляющей трубки 11. Переброс якоря 8 в другое рабочее положение происходит после очередного импульса тока, подаваемого в катушку 12. Перекидная пружина 10 должна обеспечить усилие, действующее на шток, большее, чем противодействующее усилие нагрузки.
Электромагнитный привод действует следующим образом.
При подаче импульса тока в катушку 12 якорь 8 электромагнита начинает перемещаться совместно с сердечником 4, с которым он связан за счет электромагнитной силы, создаваемой потоком, проходящим через якорь 8 и сердечник 4. Перемещение якоря 8 будет происходить за счет электромагнитной силы, создаваемой в зазоре δ потоком между торцом якоря и стопом 3. Сила, действующая на подвижный сердечник 5, будет относительно небольшой, поскольку магнитный поток будет замыкаться в основном между торцом якоря 8 и стопом 3.
По мере перемещения якоря 8 эта сила будет увеличиваться. При перемещении якоря 8 до определенного значения зазора δ произойдет изменение направления силы перекидной пружины 10 и эта сила будет совпадать с электромагнитной силой, действующей на якорь 8.
При дальнейшем уменьшении зазора δ электромагнитная сила между торцом якоря и подвижным сердечником 5 увеличится настолько, что она станет больше силы пружины 7 и подвижный сердечник 5 притянется к якорю 8, после чего действие электромагнитной силы на якорь прекратится и в дальнейшем якорь 8 будет перемещаться совместно с сердечником 5 за счет усилия перекидной пружины 10 до упора, ограничивающего движение сердечника 5. После прекращения импульса тока в катушке 12 якорь 8 будет прижат к сердечнику 5, а сердечник 4 под действием пружины 6 переместится до своего упора и таким образом зазор δ будет уже между якорем 8 и подвижным сердечником 4. После подачи следующего импульса процесс повторится в обратном направлении и произойдет перемещение якоря в положение, указанное на чертеже.
Предлагаемый электромагнитный привод имеет более простую конструкцию и схему управления по сравнению с прототипом и может быть использован для привода различных механизмов, что позволит получить определенный экономический эффект за счет применения в приводе одной катушки и импульсного питания любой полярности, что позволяет использовать привод и при импульсном питании от сети переменного тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Однокатушечный электромагнит | 2022 |
|
RU2791925C1 |
| ЭЛЕКТРОМАГНИТ С МЕХАНИЧЕСКОЙ ЗАЩЕЛКОЙ | 2005 |
|
RU2287871C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД ВЫКЛЮЧАТЕЛЕЙ | 1994 |
|
RU2074438C1 |
| Импульсный электромагнитный клапан (варианты) | 2021 |
|
RU2778999C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 2005 |
|
RU2312420C2 |
| БЫСТРОДЕЙСТВУЮЩИЙ ИМПУЛЬСНЫЙ ИНДУКЦИОННО- | 1970 |
|
SU263711A1 |
| ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТНЫЙ МЕХАНИЗМ БРОНЕВОГО ТИПА | 2002 |
|
RU2215162C1 |
| КЛАПАН ЗАПОРНЫЙ ЭЛЕКТРОМАГНИТНЫЙ | 2010 |
|
RU2477408C2 |
| Устройство управления шиберным клином трикотажной машины | 1990 |
|
SU1751234A1 |
| Электромагнитный пресс с вертикальной осью | 1990 |
|
SU1816528A1 |
Использование: в электротехнике для управления электромагнитными вентилями, контакторами, реле и т.д. Электромагнит привода содержит одну катушку, два полых стопа, в которых размещены два подвижных сердечника, отжимаемых в свои крайние положения пружинами. Якорь со штоком, проходящим через отверстия в подвижных сердечниках, связан с нагрузкой. В качестве элемента, фиксирующего якорь в одном из рабочих положений, используется перекидная пружина. В одном из крайних положений якорь за счет перекидной пружины прижат к одному из подвижных сердечников, а вместе с ним к упору. Второй подвижный сердечник отжат в свое крайнее положение и находится внутри второго полого стопа, так что свободный конец якоря при подаче импульса тока в обмотку катушки притягивается ко второму стопу. На второй подвижный сердечник сила электромагнитного притяжения будет малой и будет увеличиваться по мере перемещения якоря. При определенном положении якоря пружина меняет направление усилия и начинает действовать согласно с электромагнитной силой, воздействующей на якорь. В дальнейшем электромагнитная сила между торцом якоря и вторым подвижным сердечником возрастает до значения, достаточного для притяжения данного подвижного сердечника к якорю, что приведет к прекращению действия электромагнитной силы и якорь совместно с двумя подвижными сердечниками будет перемещаться до упора. Техническим результатом является уменьшение массы и габаритов, а также упрощение схемы управления. 1 ил.
Реверсивный электромагнитный привод с импульсным управлением, имеющий катушку управления, якорь со штоком, связанным с нагрузкой, и фиксирующий элемент для фиксации якоря в одном из рабочих положений, отличающийся тем, что он снабжен двумя полыми стопами с размещенными в них подвижными сердечниками, отжимаемыми пружинами в крайние положения, а фиксирующий элемент выполнен в виде перекидной пружины, воздействующей на шток, проходящий через отверстия, выполненные в указанных подвижных сердечниках, в одном из рабочих положений торец якоря находится у торца одного из них, а между другим его торцом и другим подвижным сердечником имеется зазор, при определенном значении которого происходит изменение направления силы перекидной пружины.
| US 4422060 А, 20.12.1983.SU 1767548 С1, 10.07.1992.RU 2101546 С1, 10.01.1998.ПРИЖИАЛКОВСКИЙ А.Л | |||
| и др | |||
| Электромагнитные клапаны | |||
| - Л.: Машиностроение, 1967, с.103. |

