Изобретение относится к пассивной радиолокации и может использоваться для приема электромагнитных сигналов шумового характера в широком диапазоне частот.
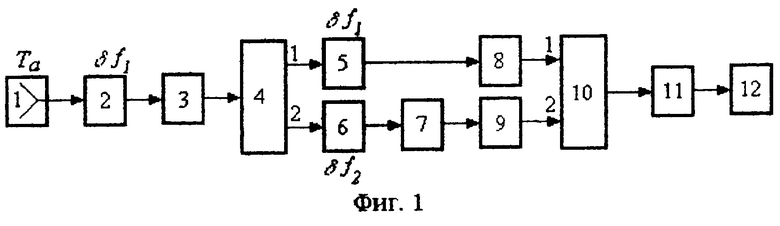
Известен радиометр (А.с. №1337832, МКИ6 G 01 R 29/08 - аналог), блок-схема которого приведена на фиг.1. Радиометр состоит из антенны 1, трех полосовых фильтров 2, 5, 6, приемника 3, делителя мощности пополам 4, аттенюатора 7, двух квадратичных детекторов 8 и 9, блока компенсации 10, усилителя низкой частоты 11 и регистратора 12. Два полосовых фильтра: входной фильтр 2 и подключенный к первому выходу делителя мощности 4 фильтр 5 одинаковы, имеют полосу пропускания частот δ f1. Третий полосовой фильтр 6, подключенный к второму выходу делителя мощности, имеет полосу δ f2. Эти полосы частот взаимно не перекрываются. Амплитудно-частотная характеристика усилителей приемника 3 равномерна и одинакова в обеих полосах δ f1 и δ f2. Изменение коэффициента усиления и шумов приемника происходит на одинаковую величину в пределах этих полос. Таким образом, на вход первого квадратичного детектора 8 поступает суммарный сигнал, состоящий из входного сигнала антенны и собственных шумов приемника, полная мощность которого равна (G/2)k(Tа+Тδf1)δf1, где G - коэффициент усиления по мощности сигналов в приемнике 3; 1/2 - коэффициент деления делителя 4; k - постоянная Больцмана; Та - эффективная шумовая температура сопротивления излучения антенны; Tδf1 - эффективная шумовая температура собственных шумов приемника в полосе δf1, приведенная к его входу.
На вход второго квадратичного детектора 9 поступают только собственные шумы приемника, мощность которых определяется из выражения (G/2)kTδf2δf2η, где Tδf2 - приведенная к входу эффективная температура шумов приемника в полосе δf2, η - коэффициент передачи аттенюатора 7. Настройкой аттенюатора на коэффициент передачи η 1 обеспечивается равенство шумовых мощностей на входах квадратичных детекторов при отсутствии сигнала. То есть, выполняется равенство (G/2)k(Tа1+Tδf1)δf1=(G/2)kTδf2δf2η1, где Tа1 - шумовая температура антенны, когда сигнал не попадает в пределы ее диаграммы направленности.
При появлении сигнала на входе антенны, благодаря селективным свойствам фильтров он будет проходить только к входу первого квадратичного детектора 8 и тем самым нарушит равновесие нулевого баланса на выходе радиометра. Для восстановления нулевого баланса изменяют величину сигнала на входе детектора 9, изменяя коэффициент передачи аттенюатора 7. Баланс будет достигнут уже при другом значении коэффициента поглощения аттенюатора η 2. Так, (G/2)k(Tа2+Tδf1)δf1=(G/2)kTδf2δf2η2, где Tа2 - эффективная шумовая температура антенны, на вход которой поступает измеряемый сигнал. Тогда

Шкала аттенюатора, проградуированная в градусах Кельвина, является измерительной шкалой. В выражении (1) в скобках находится постоянный член, являющийся для данного радиометра при измерениях опорной величиной. Этот опорный коэффициент зависит не только от отношения полос фильтров, но и от собственной шумовой температуры приемника, которая должна оставаться постоянной. Таким образом, регулировкой величины опорного сигнала, сформированного из собственных шумов радиометра, достигается состояние нулевого приема, когда коэффициент усиления приемника не влияет на точность измерений.
К недостаткам этого радиометра можно отнести невысокую точность измерений, которая будет зависеть от стабильности собственных шумов радиометра, из которых формируется опорный сигнал. Наличие двух квадратичных детекторов будет вносить также погрешность в результаты измерения, вызванные неодинаковостью изменения их коэффициентов передачи от температуры внешней среды. Для регулировки опорного сигнала используется аттенюатор. Следовательно, жесткие требования должны предъявляться к линейности его передаточной характеристики. Прецизионные аттенюаторы являются дорогостоящими.
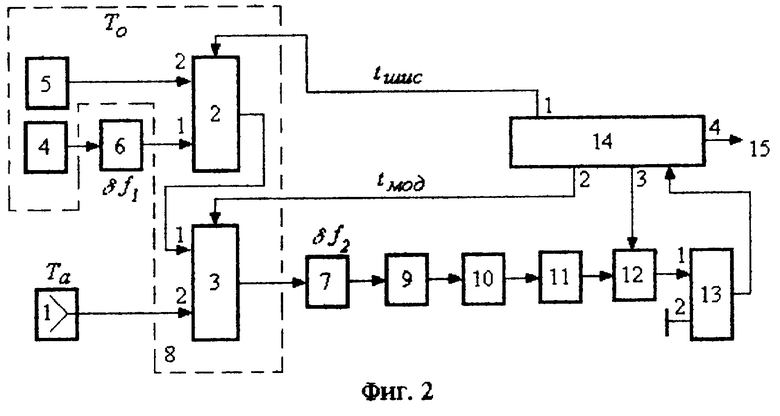
Известен радиометр (Патент РФ №2093845, МКИ6 G 01 R 29/08, G 01 S 13/95, 1997 г.), выбранный в качестве прототипа и состоящий из (фиг.2) антенны 1, двух одинаковых модуляторов 2 и 3, двух идентичных согласованных нагрузок 4 и 5, выполняющих роль шумовых генераторов, двух полосовых фильтров 6 и 7, термостатированной платы 8, тракта усиления сигналов, состоящего из приемника 9, широкополосного усилителя 10, фильтра верхних частот 11, синхронного фильтра 12, компаратора 13 (нуль-органа), а также блока управления 14 и выходной цифровой шины 15. Особенностью радиометра является построение его входной части.
В данном радиометре модуляции на входе подвергаются три шумовых сигнала: измеряемый сигнал антенны Та и два опорных сигнала. Опорные сигналы формируются одинаковыми согласованными нагрузками 4 и 5, находящимися на термостатированной плате 8 при одинаковой физической температуре То. Нагрузки подключены к входам первого модулятора 2. Первая нагрузка 4 подключена к первому входу модулятора 2 через фильтр 6 с полосой пропускания δf1, а вторая нагрузка 5 подключена к второму входу этого же модулятора непосредственно. Второй полосовой фильтр 7 установлен на выходе второго модулятора 3 перед приемником 9 и имеет полосу пропускания частот δf2. Полосовые фильтры удовлетворяют двум условиям. Во-первых, полоса второго фильтра 7 шире полосы первого фильтра 6 и выполняется равенство

где n - положительное число, большее единицы.
Во-вторых, рабочая полоса δf1 находится внутри полосы δf2. Приемно-усилительный тракт радиометра имеет равномерную амплитудно-частотную характеристику в полосе δf2, и при изменении внешних условий изменение коэффициента усиления приемника происходит на одинаковую величину в этой полосе.
Таким образом, если выполняется соотношение (2), мощности шумовых сигналов антенны, первой и второй согласованных нагрузок, на входе приемника 9 соответственно равны:
Для сигналов должно выполняться неравенство Wcн1<Wа<Wcн2 во всем диапазоне изменения сигнала антенны.
Сигналы согласованных нагрузок в модуляторе 2 подвергаются широтно-импульсной модуляции. В модуляторе 3 сигнал антенны и выходной сигнал первого модулятора 2 подключаются к входу приемника на равные промежутки времени. Закон модуляции для второго модулятора 3 - симметричные импульсы со скважностью 2. Управление обоими модуляторами происходит с выходов 1 и 2 блока управления.
Принцип работы радиометра-прототипа заключается в следующем. Условием нулевого баланса в радиометре является равенство нулю напряжения на входе компаратора 13 в половину периода модуляции модулятора 3, когда к входу приемника 9 подключена антенна. Для осуществления принципа в измерительный тракт радиометра введен фильтр верхних частот 11, частота среза которого ниже частоты модуляции модулятора 3. Основное назначение фильтра - исключение постоянной составляющей в сигнале без заметного искажения формы импульсов. Если напряжение на входе компаратора 13 равно нулю в полупериоде подключения антенны, следовательно, и равны на его входе вольт-секундные площади положительного (сигнал второй согласованной нагрузки 5) и отрицательного (сигнал первой согласованной нагрузки 4, прошедший через фильтр 6) импульсов в другом полупериоде при подключенном выходе модулятора 2 к приемнику 9. Тогда сигнал антенны определяется из линейного соотношения
где tшис - длительность широтно-импульсного сигнала, поступающего на управляющий вход модулятора 2, tмод - длительность симметричного импульсного сигнала на входе управления модулятором 3.
Регулировка равенства вольт-секундных площадей импульсов осуществляется блоком управления путем изменения длительности широтно-импульсного сигнала tшис без изменения основного периода модуляции, заданного длительностью tмод.
Как следует из выражения (4), сигнал антенны непосредственно определяется через длительность tшис, с которой связан по линейному закону. В формулу не входит коэффициент усиления измерительного тракта, а также собственные шумы приемника, так как постоянная составляющая сигнала отфильтровывается фильтром верхних частот 11.
Данным радиометром, как следует из (4), можно измерять сигналы от То/n (tшис=0) до То (tшис=tмод). Так как температуру термостатированной платы Т0 можно изменять лишь в небольших пределах, поэтому верхняя граница измеряемых сигналов может быть изменена также в небольших пределах. Невозможность изменения верхней границы измеряемых сигналов в больших пределах является недостатком радиометра-прототипа. Нижняя граница, как следует из равенства (4), может варьироваться в широких пределах изменением параметра n, который определяется соотношением полос полосовых фильтров 6 и 7.
Целью изобретения является расширение функциональных возможностей радиометра по выбору диапазона измерений. Преимущества предлагаемого радиометра по сравнению с прототипом состоят в том, что данным радиометром можно измерять сигналы в широком динамическом диапазоне, и снимаются ограничения на выбор диапазона измерений. Для предлагаемого радиометра нет жесткой привязки границы диапазона измерений к конкретной термодинамической температуре термостатированной платы, при которой находятся согласованные нагрузки во входной части радиометра.
Поставленная цель достигается тем, что в нулевой радиометр, содержащий антенну, первую и вторую согласованные нагрузки, первый и второй полосовые фильтры, первый и второй модуляторы, приемник, фильтр верхних частот, синхронный фильтр, компаратор, блок управления, первый, второй и третий выходы которого соединены с управляющими входами первого, второго модуляторов и синхронного фильтра соответственно, а вход блока управления подключен к выходу компаратора, второй вход которого соединен с общей шиной радиометра, первая согласованная нагрузка через первый полосовой фильтр соединена с первым входом первого модулятора, выход которого подключен к первому входу второго модулятора, а выходом радиометра является четвертый выход блока управления, причем первая и вторая согласованные нагрузки, первый и второй модулятор установлены на термостатированной плате, введены третий полосовой фильтр, предварительный усилитель низкой частоты и усилитель низкой частоты, выход второго модулятора подключен через последовательно соединенные приемник, предварительный усилитель низкой частоты, синхронный фильтр, усилитель низкой частоты, фильтр верхних частот к первому входу компаратора, вторая согласованная нагрузка подключена через второй полосовой фильтр к второму входу первого модулятора, а антенна соединена с вторым входом второго модулятора через третий полосовой фильтр.
На фиг.1 представлена структурная схема радиометра с формированием опорного сигнала из собственных шумов приемника с использованием полосовых фильтров (аналог).
На фиг.2 представлена структурная схема нулевого радиометра с дополнительной широтно-импульсной модуляцией опорных сигналов, сформированных с использованием частотных свойств полосовых фильтров (прототип).
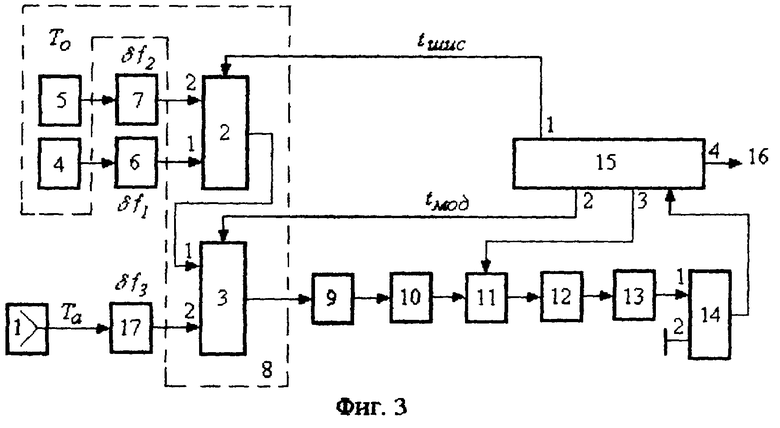
На фиг.3 представлена структурная схема предлагаемого нулевого радиометра.
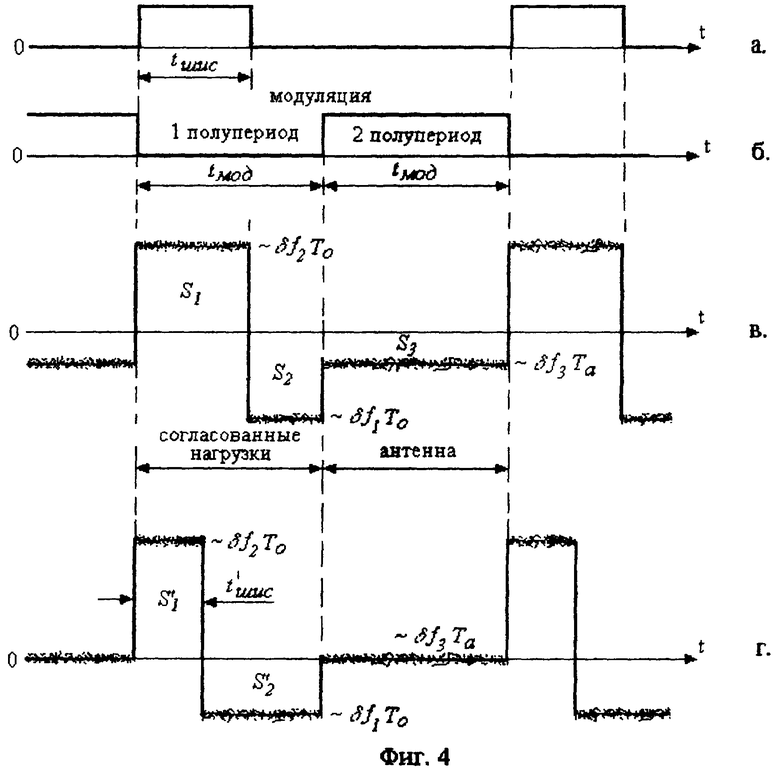
На фиг.4 приведены временные диаграммы, поясняющие принцип работы предлагаемого радиометра.
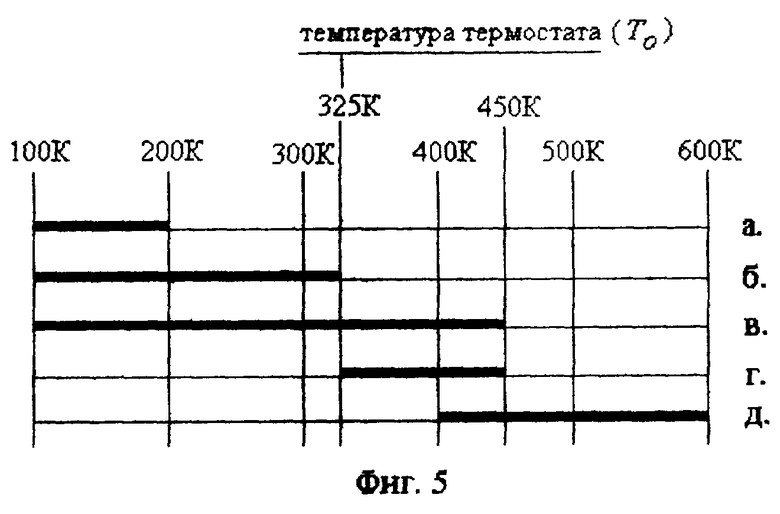
На фиг.5 представлена карта вариаций диапазонов измерений для всех возможных случаев.
Согласно структурной схеме на фиг.3 радиометр условно состоит из трех частей: входного блока, линейного измерительного тракта и блока управления. Входной блок в своем составе имеет два шумовых генератора, роль которых выполняют первая 4 и вторая 5 согласованные нагрузки, первый 2 и второй 3 идентичные модуляторы, имеющие конфигурацию 2× 1, первый 6, второй 7 и третий 17 полосовые фильтры. Модуляторы переключаются по управляющим сигналам с выходов блока управления. К входу блока подключается антенна 1, а выход соединяется с измерительным трактом радиометра. С целью минимизации погрешностей работы радиометра согласованные нагрузки, как генераторы образцовых шумовых сигналов, термостатируются. Так же термостатируются и оба модулятора, так как содержат в своем составе полупроводниковые структуры (диоды), параметры которых зависят от температуры. Для этого модуляторы вместе с согласованными нагрузками закрепляются на термостатированной плате 8 и находятся с ней при одинаковой температуре То.
Основным узлом измерительного тракта является приемник 9, где происходит усиление промодулированных сигналов по высокой частоте и их квадратичное детектирование. Далее сигналы предварительно усиливаются по низкой частоте в предварительном усилителе низкой частоты 10. Так как в сигналах после детектора имеются высокочастотные, имеющие случайную природу, составляющие, поэтому после предварительного усиления производится низкочастотная синхронная фильтрация сигналов в синхронном фильтре 11. Постоянная времени синхронного фильтра имеет небольшое значение и позволяет устранить в сигналах высокочастотные шумы. Тем самым устраняется перегрузка усилителя низкой частоты 12. В следующей схеме измерительного тракта в фильтре верхних частот 13 исключается постоянная составляющая и модулированная последовательность сигналов подается на вход компаратора 14. Так как второй вход компаратора соединен с общей точкой схемы, следовательно, он определяет полярность входного сигнала.
Выходной сигнал компаратора в уровнях логического нуля и единицы поступает на вход блока управления 15, выполненного на цифровых элементах.
Принцип работы радиометра заключается в следующем. Блок управления вырабатывает три управляющих импульсных сигнала. Сигналы с первого и второго его выходов поступают во входную часть радиометра и производят модуляцию измеряемого и опорных сигналов. Управляющий сигнал tшис с первого выхода (фиг.4а) блока управления является широтно-импульсным, то есть изменяется по длительности. Этим сигналом в модуляторе 2 происходит широтно-импульсная модуляция сигналов согласованных нагрузок, которые выполняют роль опорных шумовых генераторов с эффективными температурами шумов, равными температуре термостатированной платы Т0. Управляющий сигнал tмод с выхода 2 блока управления (фиг.4б) производит симметричную модуляцию сигнала антенны и уже предварительно модулированных опорных сигналов согласованных нагрузок. Сигнал управления модулятором 3 имеет скважность, равную двум, поэтому включает в себя два равных по длительности полупериода. В первом полупериоде, как следует из фиг.4б, на вход приемника подключается выход модулятора 2; во втором полупериоде - антенна 1 через второй вход модулятора 3, Когда на вход приемника через модулятор 3 подключается выход модулятора 2, в последнем осуществляется широтно-импульсная модуляция сигналов согласованных нагрузок.
Значит, на входе приемника 9 в разные моменты времени действует один из следующих сигналов:
- сигнал согласованной нагрузки 4, шумовая мощность которого равна

где k - постоянная Больцмана, δ f1 - полоса пропускания полосового фильтра 6, Т0 - термодинамическая температура термостатированной платы, на которой установлена нагрузка 4. Так как она согласована с линией передачи и все остальные соединения согласованы, поэтому ее эффективная шумовая температура равна тоже То;
- сигнал согласованной нагрузки 5, мощность которого равна

- сигнал антенны, мощность которого на входе приемника равна

где Тa - эффективная температура шумов антенны.
В приемнике 9 эти сигналы усиливаются по мощности с коэффициентом G, затем происходит их квадратичное детектирование с коэффициентом преобразования детектора β . Таким образом, на выходе приемника выделяется огибающая, которая усиливается по низкой частоте в усилителях 10 и 12 с общим коэффициентом усиления Кu.
Следовательно, на входе фильтра верхних частот 13 в разные моменты времени модуляции действуют сигналы, амплитуды напряжений которых равны:



Назначение фильтра верхних частот 13 в радиометре - исключение постоянной составляющей в периодическом сигнале. Для этого он должен удовлетворять следующим требованиям - передача сигнала через него должна происходить с минимальными искажениями формы импульсов, что обеспечивается должным выбором нижней частоты полумощности фильтра.
На вход фильтра верхних частот кроме сигналов Uсн1, Ucн2, Uа поступает постоянно действующий немодулированный сигнал, вызванный собственной шумовой температурой приемного измерительного тракта, который равен

где δ f - полоса принимаемых приемником частот; Тш - эффективная температура собственных шумов приемника, приведенная к его входу.
Так как фильтром верхних частот исключается постоянная составляющая, следовательно, на его выходе также не будет присутствовать напряжение Ump, так как это напряжение не изменяется на интервалах модуляции.
Таким образом, на выходе фильтра 13 для произвольной длительности широтно-импульсного сигнала tшис, вырабатываемого на первом выходе блока управления 15, будет действовать сигнал с периодической структурой, форма которого приведена на фиг.4в.
Для одного периода сигналов на временной диаграмме фиг.4в с исключенной постоянной составляющей соблюдается равенство вольт-секундных площадей импульсов, имеющих положительный и отрицательный знаки. То есть, S1=S2+S3. Этот случай соответствует ненастроенному нулевому балансу в радиометре. Нулевой баланс в радиометре считается настроенным, если вольт-секундная площадь импульса S3 равна нулю. Настройка на условие S3=0 производится под управлением блока управления 15, который регулирует длительность широтно-импульсного сигнала tшис на выходе 1. Управляющим сигналом для блока управления, согласно которому он регулирует длительность tшис, является сигнал с выхода компаратора 14, являющегося оконечным узлом измерительного тракта. Блок управления анализирует сигнал компаратора синхронно, то есть во время второго полупериода модуляции, когда по измерительному тракту радиометра проходит сигнал антенны.
Алгоритм регулировки длительности tшис блоком управления следующий: если импульс S3 отрицательный (расположен ниже нулевой оси времени), тогда блок управления уменьшает длительность tшис, если импульс S3 положительный, блок управления увеличивает длительность tшис.
Тогда для неизменного сигнала антенны Тa при неизменной длительности полупериода модуляции, равной tмод, временная диаграмма сигналов на изменение tшис будет смещаться относительно нулевой оси времени вверх (уменьшение tшис) или вниз (увеличение tшис). Для фиг.4в изменение длительности tшис блоком управления происходит на ее уменьшение и продолжается до момента исчезновения импульса S3. Для этого случая временная диаграмма показана на фиг.4г, когда в результате регулировки длительности tшис выполнилось условие S3=0.
Учитывая, что амплитуды импульсов S'1 и S'2 на фиг.4г пропорциональны соответствующим разностям сигналов δf2To – δf3Ta и δf3Ta - δf1To, для выполненного равенства вольт-секундных площадей импульсов S'1=S'2 при новой длительности t'шис можно записать

Выполнив сокращения и решая равенство (10) относительно t'шис, получим передаточную характеристику радиометра, которая будет определяться формулой

Из последней формулы следует, что длительность t'шис прямо пропорциональна сигналу антенны Та. Следовательно, через эту длительность можно найти косвенным путем сигнал антенны, которая связана с ним линейным соотношением (11). На точность измерений не влияет коэффициент передачи всего измерительного тракта, равный произведению Gβ Ku, как и в радиометрах, работающих по нулевому методу. В формулу (11) для нахождения длительности широтно-импульсного сигнала не входит сигнал, связанный с собственными шумами радиометра. Как было пояснено выше, этот сигнал непрерывен и не подвергается модуляции. Следовательно, через фильтр верхних частот на компаратор не проходит. Однако в формулу (11) для нахождения t'шис кроме измеряемого сигнала антенны входят полосы пропускания фильтров 6, 7, 17, температура термостатированной платы То и длительность полупериода модуляции tмод. Эти величины должны поддерживаться постоянными. Их изменения будут приводить к погрешностям измерений.
Для определения границ диапазона измерений решим равенство (11) относительно эффективной шумовой температуры антенны Та.

Подставив в формулу (12) крайние значения длительности t'шис, равные нулю и длительности полупериода tмод, получим минимальную и максимальную границы диапазона измерений сигнала антенны:

Следовательно, анализируя (13) можно сделать вывод, что изменением полос пропускания фильтров можно настроить диапазон измерений на выбранный, сохраняя температуру термостатированной платы постоянной и равной To.
Полоса пропускания δ f2 второго фильтра 7 больше полосы пропускания δ f1 первого фильтра 6, так как по определению опорный сигнал, формируемый второй согласованной нагрузкой 5, больше опорного сигнала, вырабатываемого первой согласованной нагрузкой 4. Это следует из временной диаграммы фиг.4г. То есть, δ f2=nδ f1 и n>1. Это условие выполняется всегда.
Условия, устанавливающие связь между полосами первого 6 и второго 7 фильтров с полосой входного фильтра 17, через который поступает измеряемый сигнал антенны, найдем следующим образом. Пусть
δ f2=pδ f3, где p>1 или p<1;
δ f1=mδ f3, где m>1 или m<1. (14)
Тогда полосы частот δ f1, δ f2, δ f3 связаны между собой следующими зависимостями:
Из соотношений (15) можно получить следующее важное равенство:

Так как n>1, следовательно, р>m.
С учетом замены n=(δ f2/δ f1), p=(δ f2/δ f3), m=(δ f1/δ f3), выражение (12) для определения сигнала антенны можно записать

Так как из (16) р=nm, выражение (17) можно записать в следующем виде:

Из (18) границы диапазона измерений при t’шис=0 и t’шис=tмод с учетом (15) тогда равны:

Рассмотрим числовой пример. Типичным случаем температуры статирования входных блоков радиометров является температура, равная 325 К (52° С). То есть, Tо=325 К. Если полосу приема сигналов радиометром выбрать равной 100 МГц (δ f3=100 МГц), можно определить полосы других двух фильтров, если необходимо измерять сигнал антенны в диапазонах:
а. 100 К-200 К;
б. 100 К - 325 К;
в. 100 К - 450 К;
г. 325 К - 450 К;
д. 400 К - 600 К.
Данные диапазоны измерения сигнала антенны приведены на фиг.5 и характеризуют все возможные сочетания диапазонов измерений относительно опорной температуры То.
Учитывая (19), можно записать
Тогда используя соотношения (20), можно вычислить полосы фильтров 6 и 7 для диапазонов а. - д.:
а. δ f1=30.8 МГц; δ f2=61.5 МГц;
б. δ f1=30.8 МГц; δ f2=100 МГц;
в. δ f1=30.8 МГц; δ f2=138.5 МГц;
г. δ f1=100 MГц; δ f2=138.5 МГц;
д. δ f1=123.1 МГц; δ f2=184.6 МГц.
Полосы частот всех фильтров могут не перекрываться, но эти полосы должны находиться в полосе приема сигналов радиометром. Центральные частоты этих фильтров определяются приемником радиометра и принимаемыми сигналами.
В радиометре блок управления полностью соответствует блоку управления радиометра-прототипа. Режим его работы - следящий. Блок управления осуществляет непрерывное слежение за сигналом на выходе компаратора измерительного тракта в каждом втором полупериоде модуляции. Анализируя этот сигнал блок управления по выше описанному алгоритму в каждом первом полупериоде модуляции корректирует длительность широтно-импульсного сигнала tшис. Изменение сигнала антенны приведет к появлению напряжения на входе компаратора отрицательной или положительной полярности во втором полупериоде модуляции. Это соответствует случаю, что тракт разбалансирован и выходные данные не достоверны. Блок управления в соответствии с сигналом компаратора направленно изменяет длительность широтно-импульсного сигнала. Модулированная последовательность сигналов на входе компаратора сдвигается относительно нулевой оси времени и, когда устанавливается нулевое напряжение в полупериод коммутации антенны, блок управления прекращает регулировку широтно-импульсного сигнала. Тракт снова сбалансирован, а это значит, что длительность широтно-импульсного сигнала, определяющая сигнал антенны, является действительной.
В блоке управления длительность широтно-импульсного сигнала представлена цифровым кодом, который выдается на цифровую шину 16, которая является выходом радиометра.
Синхронный фильтр, устроенный так же, как и синхронный фильтр прототипа, является фильтром первого порядка и производит низкочастотную фильтрацию сигналов, сглаживая высокочастотные их выбросы. Синхронный фильтр представляет собой RC-цепи с тремя коммутируемыми конденсаторами. Каждый конденсатор фильтрует один из трех входных сигналов, из которых два опорных и один сигнал, измеряемый от антенны.
Предварительный усилитель низкой частоты и усилитель низкой частоты являются линейными усилителями напряжения.
Фильтр верхних частот представляет собой разделительную CR-цепь, исключающую постоянную составляющую в периодическом сигнале.
Полосовые фильтры являются пассивными СВЧ-устройствами, не имеют в своем составе полупроводниковых элементов и собираются из четвертьволновых линий передач. То есть, имеют стабильные параметры и могут не термостатироваться. Рассчитываются по известным методикам, широко описанным в литературе.
Таким образом, достоинства предложенного радиометра заключаются в том, что он работает по нулевому методу, когда изменения коэффициента усиления измерительного тракта не сказываются на точности измерений. Вторым его достоинством является нечувствительность к постоянной составляющей собственных шумов радиометра. На выходе блока управления сигнал представлен в цифровой форме, так как длительность широтно-импульсного сигнала легко преобразовать в код. Это значит, что в блоке управления отсутствуют стандартные аналого-цифровые преобразователи. Цифровой код может быть подвержен дальнейшей обработке цифровыми системами, включая компьютерные средства. В радиометре свободным выбором фильтров можно изменять полосу приема сигналов антенны (δ f3) и границы диапазона измерений (δ f1, δ f2), не изменяя опорные сигналы шумовых генераторов, которыми являются согласованные нагрузки. Диапазон измерений можно выбирать в необходимых пределах изменения сигнала антенны, и этот диапазон не будет жестко привязан к температуре термостата. Так как нагрузки находятся при одинаковой температуре То, можно измерять эту температуру точными контактными электронными термометрами и далее рассчитывать сигнал антенны по формуле (12). Отсюда следует, что можно упростить схему термостатирования и точность поддержания температуры в термостате. Если выполнить фильтры с электронной перестройкой полос, следовательно, можно осуществить изменение диапазона измерений оперативным путем.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОМЕТР | 2002 |
|
RU2211455C1 |
| МОДУЛЯЦИОННЫЙ РАДИОМЕТР | 2002 |
|
RU2220426C1 |
| НУЛЕВОЙ РАДИОМЕТР | 1992 |
|
RU2093845C1 |
| МОДУЛЯЦИОННЫЙ РАДИОМЕТР | 2001 |
|
RU2187824C1 |
| СВЕРХВЫСОКОЧАСТОТНЫЙ РАДИОМЕТР | 2000 |
|
RU2168733C1 |
| НУЛЕВОЙ РАДИОМЕТР | 2010 |
|
RU2439594C1 |
| НУЛЕВОЙ РАДИОМЕТР | 2016 |
|
RU2642475C2 |
| НУЛЕВОЙ РАДИОМЕТР | 1996 |
|
RU2124213C1 |
| ДВУХКАНАЛЬНЫЙ НУЛЕВОЙ РАДИОМЕТР | 2008 |
|
RU2393502C1 |
| МИКРОВОЛНОВЫЙ РАДИОМЕТР | 2022 |
|
RU2794063C1 |
Изобретение относится к пассивной радиолокации для измерения слабых шумовых сигналов в широком диапазоне частот. Техническим результатом является расширение функциональных возможностей радиометра по выбору диапазона измерений. Нулевой радиометр содержит антенну, первую и вторую согласованные нагрузки, первый и второй полосовые фильтры, первый и второй модуляторы, приемник, фильтр верхних частот, синхронный фильтр, компаратор, блок управления, первый, второй и третий выходы которого соединены с управляющими входами первого, второго модуляторов и синхронного фильтра соответственно, а вход блока управления подключен к выходу компаратора, второй вход которого соединен с общей шиной радиометра, первая согласованная нагрузка через первый полосовой фильтр соединена с первым входом первого модулятора, выход которого подключен к первому входу второго модулятора, а выходом радиометра является четвертый выход блока управления, причем первая и вторая согласованные нагрузки, первый и второй модулятор установлены на термостатированной плате, при этом в него введены третий полосовой фильтр, предварительный усилитель низкой частоты и усилитель низкой частоты, выход второго модулятора подключен через последовательно соединенные приемник, предварительный усилитель низкой частоты, синхронный фильтр, усилитель низкой частоты, фильтр верхних частот к первому входу компаратора, вторая согласованная нагрузка подключена через второй полосовой фильтр к второму входу первого модулятора, а антенна соединена с вторым входом второго модулятора через третий полосовой фильтр. 5 ил.
Нулевой радиометр, содержащий антенну, первую и вторую согласованные нагрузки, первый и второй полосовые фильтры, первый и второй модуляторы, приемник, фильтр верхних частот, синхронный фильтр, компаратор, блок управления, первый, второй и третий выходы которого соединены с управляющими входами первого, второго модуляторов и синхронного фильтра, соответственно, а вход блока управления подключен к выходу компаратора, второй вход которого соединен с общей шиной радиометра, первая согласованная нагрузка через первый полосовой фильтр соединена с первым входом первого модулятора, выход которого подключен к первому входу второго модулятора, а выходом радиометра является четвертый выход блока управления, причем первая и вторая согласованные нагрузки, первый и второй модулятор установлены на термостатированной плате, отличающийся тем, что в него введены третий полосовой фильтр, предварительный усилитель низкой частоты и усилитель низкой частоты, выход второго модулятора подключен через последовательно соединенные приемник, предварительный усилитель низкой частоты, синхронный фильтр, усилитель низкой частоты, фильтр верхних частот к первому входу компаратора, вторая согласованная нагрузка подключена через второй полосовой фильтр к второму входу первого модулятора, а антенна соединена с вторым входом второго модулятора через третий полосовой фильтр.
| НУЛЕВОЙ РАДИОМЕТР | 1992 |
|
RU2093845C1 |
| МОДУЛЯЦИОННЫЙ РАДИОМЕТР | 2001 |
|
RU2187824C1 |
| Нулевой радиометр | 1989 |
|
SU1704107A1 |
| Компенсационный радиометр | 1984 |
|
SU1337832A1 |
| ИМПУЛЬСНЫЙ ЭЛЕКТРИЧЕСКИЙ РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2001 |
|
RU2211952C2 |
| US 4527162 A, 02.07.1985 | |||
| US 4431306 A, 14.02.1984. | |||

