Изобретение относится к попасти водолазного дела и касается конструкции дыхательного аппарата (ИДА) на дыхательных газовых смесях (ДГС), приготавливаемых самим аппаратом. При этом учитываются параметры безопасной жизнедеятельности пользователя аппаратом, в том числе степень оксигенации крови и тканей организма недодача во всех режимах его деятельности под водой.
Существующие системы обеспечения жизнедеятельности водолаза, в первую очередь, включают создание ДГС из компонентов, запасенных в сжатом или сжиженном состоянии либо в химически связанном виде и высвобождаемых редуцированием, переводом из одного фазового состояния в другое или путем химической регенерации. Состав ДГС формируется в зависимости от длительности и глубины пребывания водолаза под водой, а также в зависимости от рода деятельности и усилий, которые акванавт при этом затрачивает.
Безопасность жизнедеятельности водолаза в глубоководных условиях определяется главным образом эффективностью решения двух основных проблем: оценки адекватности процедуры декомпрессии водолаза в процессе глубоководных погружений и оценки адекватности процедуры подготовки ДГС, исключающей кислородное голодание или отравление избытком кислорода в процессе различной деятельности водолаза или изменения глубины погружений.
Если решение первой проблемы основывается на использовании известных достаточно эффективных способов оценки адекватности режимов декомпрессии водолаза, то решение второй проблемы на современном этапе развития водолазного дела не обеспечивает необходимого уровня безопасности глубоководных погружений.
В описании изобретения к патенту РФ N2108745, МКИ А 61 В 5/02 от 21.11.95 подробно рассмотрены вопросы оценки безопасности декомпрессии. Достаточно долго единственным способом оценки адекватности режимов декомпрессии водолазов оставался "прямой" метод по результатам серии погружений с регистрацией случаев докомпрессионных заболеваний. Известно, что причиной декомпрессионной болезни (ДБ) является наличие избыточных нерастворенных в тканях организма газовых пузырьков. Следующим этапом получения информации о ДВ стали косвенные способы, основанные на регистрации газовых пузырьков в организме различными методами, например с помощью ультразвуковых приборов на основе эффекта Доплера или с применением электромагнитных устройств. В указанном выше изобретении предложено дополнительно регистрировать артериальное давление и частоту сердечных сокращений водолаза и определять через их соотношение вегетативный индекс (ВИК).
Ни один из известных способов оценки безопасности глубоководных погружений, в том числе по режимам декомпрессии, не обеспечивает эффективной оценки насыщения артериальной крови кислородом (оксигенации крови) для предупреждения кислородного голодании или отравления водолаза в процессе глубоководных погружений с использованием ДГС, приготавливаемых самим ИДА.
Вопросы подготовки ДГС подробно рассмотрены и статье "Рециркуляционные дыхательные аппараты". Материалы фирмы "Тетис". Октопус N-4, М.: Тополь, стр. 107-112. Все современные ИДА реализуют следующую схему функционирования. Дыхательный аппарат содержит дыхательный мешок и баллоны с индифферентным газом и кислородом. Специальные цепи управления регулируют своевременную подачу в дыхательный мешок порций кислорода. Известны следующие основные способы создания ДГС в ИДА:
- по самочувствию водолаза, ориентирующегося на свое собственное представление о состоянии кислородного голодания и добавляющего произвольно и вручную кислород в дыхательный мешок. При этом практически всегда имеет место передозировка кислорода;
- автоматически путем переключения дюз механическим устройством, при этом величина дюзового потока в дыхательный мешок рассчитывается предварительно в зависимости от программы нахождения водолаза под водой, и состав газовой смеси в мешке не контролируется;
- автоматически с использованием электронного управляющего блока, в состав которого входит кислородный сенсор, регистрирующий содержание кислорода в дыхательном мешке.
В наиболее усовершенствованных дыхательных аппаратах необходимая информация о парциальном давлении кислорода в ДГС, давлении в баллонах, текущей глубине, времени погружения, состоянии аккумуляторных батарей, а также описание повреждений при сигнале тревоги (например, в ИДА STELTН шотландской фирмы DIVEKX) обрабатывается микропроцессором и только отображается на дисплее, который закреплен на руке водолаза.
Однако изменение глубины погружения приводит к повышению плотности ДГС и, следовательно, к изменению парциального давления кислорода. Кроме того, парциальное давление кислорода в дыхательном мешке не адаптировано к специфике деятельности в глубоководных условиях и индивидуальным морфофункциональным характеристикам организма водолаза. Неточность измерения парциального давления кислорода существующими датчиками в ДГС дыхательного мешка, опосредованность косвенной оценки безопасности состава ДГС создают реальную угрозу жизни и здоровью водолаза.
Современные физиологические данные о действии кислорода на организм человека показывают, что наиболее репрезентативным параметром для эффективного адаптивного управления подачей кислорода в процессе подготовки ДГС в ИДА является оценка степени оксигенации крови и тканей организма водолаза, характеризующей достаточность необходимого количества кислорода в клетках тканей организма с учетом индивидуальных физиологических характеристик конкретного водолаза во всех режимах его деятельности под водой - от свободного парения в толще воды в качестве подводного туриста до промывки туннелей под корпусом затонувшего судна (Стерлин Ю.Г. Специфические проблемы разработки пульсовых оксиметров. - М.: Медицина, Медицинская техника N6, 1993 г., стр. 26-30).
Известно техническое решение по свидетельству РФ на полезную модель №15330, MПK А 61 В 5/00, 2000 г., согласно которому датчик пульсового оксиметра выполнен в виде клипсы с возможностью закрепления ее на ухе пользователя дыхательным аппаратом. Это решение принято за прототип.
Испытания прототипа показали его эффективность и удобство пользования, однако выявлено, что в некоторых случаях использование только датчика в виде клипсы в схеме дыхательного аппарата может привести к аварийной ситуации, например из-за небрежного крепления клипсы к уху водолаза.
Задача предлагаемого решения - повышение безопасности глубоководных погружений за счет более эффективного управления формированием дыхательной смеси, поступающей в дыхательный аппарат для глубоководных погружений.
Для решения поставленной задачи дыхательный аппарат для глубоководного погружения, содержащий дыхательный мешок и соединенные с ним через цепи управления баллоны с индифферентным газом и кислородом, а также блок измерения оксигенации крови, дополнен блоком адаптации уставок к конкретному пользователю и двумя каналами регулировки подачи кислорода в дыхательный мешок, основным и корректирующим, каждый из каналов содержит блок сравнения, управляющий блок и регулирующий клапан подачи кислорода, причем первый вход блока сравнения каждого канала соединен с выходом блока адаптации, а выход блока сравнения через управляющий блок соединен со входом регулирующего клапана баллона кислорода, второй вход устройства сравнения основного канала соединен с датчиками парциального давления кислорода в дыхательном мешке, а второй вход корректирующего канала соединен с датчиками блока измерения оксигенации крови конкретного пользователя.
Каждый канал дыхательного аппарата может быть дополнен блоком контроля работы канала, таймерным устройством для полуавтоматического режима управления подачей кислорода и ручным приводом дистанционного управления подачей кислорода.
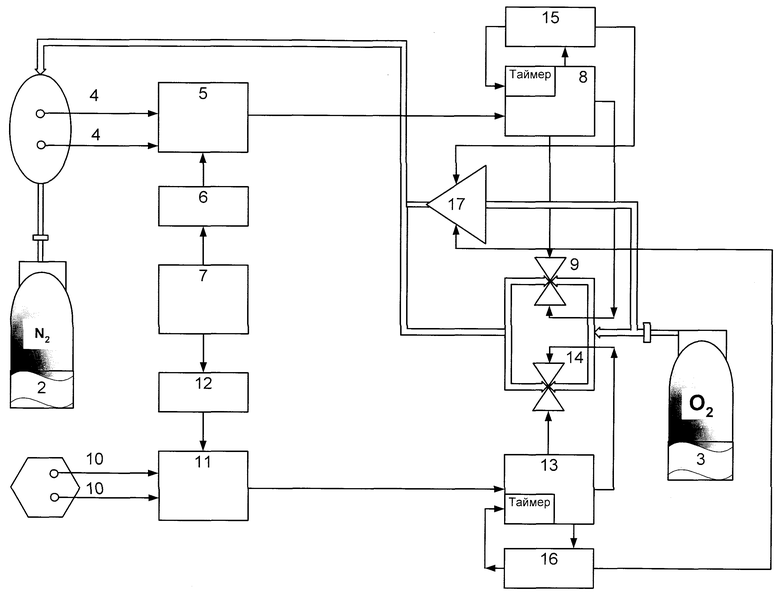
Предлагаемый аппарат представлен на чертеже.
Дыхательный аппарат для глубоководного погружения содержит дыхательный мешок и соединенные с ним через цепи управления баллоны с индифферентным газом 2 и кислородом 3. Цепь управления содержит два канала - основного (грубого) и корректирующего (тонкого) регулирования содержания кислорода в дыхательном мешке 1.
Канал грубого регулирования обеспечивает порционную подачу кислорода по заранее установленной программе - в зависимости от времени нахождения под водой, глубины погружения, подводных условий и рода выполняемой работы. Он содержит датчик 4 парциального давления кислорода, который размещен в дыхательном мешке 1. Сигнал от датчика 4 поступает на блок сравнения 5, в котором он сравнивается с заданной уставкой 6 величины парциального давления кислорода в дыхательном метке. Сигнал об уровне уставки поступает от блока 7 адаптации уставок к конкретному пользователю.
По результатам сравнения на выходе блока 5 появляется управляющий сигнал, поступающий на управляющий блок 8. Блок 8 формирует режим подачи кислорода через клапан 9 в дыхательный мешок. Регулировка может осуществляться по времени подачи и по объему.
Канал тонкого регулирования обеспечивает корректировку работы основного канала в зависимости от индивидуальной адаптации конкретного пользователя к гипербарии в реальном времени. Он содержит пульсиоксиметр с датчиками 10, которые закрепляются на ухе водолаза или на загубнике дыхательного аппарата. Пульсиоксиметр позволяет в режиме реального времени оперативно определять степень оксигенации (насыщения кислородом) артериальной крови водолаза. Сигналы с датчиков 10 поступают на блок 11, где сравниваются с уставками 12 уровня требуемой оксигенации крови, которые поступают от того же блока 7 адаптации уставок к морфофункциональным особенностям организма конкретного пользователя.
Сигнал с выхода блока сравнения 11 поступает на другой управляющий блок 13, который формирует режим корректирующей подачи кислорода в дыхательный мешок 1 через второй клапан 14.
Как показали испытания ИЛЛ различных конструкций, использование только одного из указанных каналов регулирования насыщения дыхательной смеси кислородом недостаточно для безопасности жизнедеятельности водолаза на глубине и может привести к серьезным угрозам его здоровью. Организация управления по двум параметрам - парциальному давлению и оксигенации крови обеспечила существенное повышение качества дыхательной смеси, что позволило снизить отрицательное воздействие на здоровье и работоспособность водолаза.
Предлагаемая система управления предусматривает также наличие блоков контроля 15 и 16 работы каналов регулирования. По результатам контроля обеспечивается таймерное раздельное, или одновременное полуавтоматическое управление клапанами 9 и 14, или переход на ручное управление посредством дистанционного привода 17 в случае выхода из строя обоих автоматических каналов.
Устройство работает следующим образом.
Н блок 7 адаптации уставок вводятся исходные данные конкретного пользователя. Эти данные учитывают морфофункциональные свойства организма конкретного водолаза в зависимости от различных нагрузок при работе в условных подводной среды. Определение уставок осуществляется на основе динамической диагностики соответствия дозы возмущающего фактора - парциального давления кислорода в ДГС - оптимуму ответных физиологических реакций организма, в качестве интегрального показателя которых используется уровень оксигенации артериальной крови в капиллярной системе тканей организма, контролируемый пульсоксиметрической схемой. Это наиболее информативный показатель для регулирования кислородного режима ДГС.
Данные блока адаптации затем используются для регулировки парциального давления кислорода в дыхательном мешке и оксигенации крови пользователя.
По результатам сравнения сигналов с датчиков 4 и 10 с уставками от блока адаптации осуществляется подача кислорода.
Таким образом, в предлагаемом устройстве реализованы не только контроль за качеством дыхательной смеси в реальном масштабе времени с использованием самых информативных и оперативных показателей, но и три уровня регулировки подачи кислорода: автоматическая, полуавтоматическая и ручная для обеспечения максимальной безопасности устройства.
Испытания предлагаемого аппарата показали его высокую эффективность по защите здоровья водолаза и повышению его работоспособности в условиях глубоководного погружения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЛУБОКОВОДНЫЙ ВОДОЛАЗНЫЙ ДЫХАТЕЛЬНЫЙ АППАРАТ ЗАМКНУТОЙ СХЕМЫ ДЫХАНИЯ С ЭЛЕКТРОННЫМ УПРАВЛЕНИЕМ ПАРЦИАЛЬНОГО ДАВЛЕНИЯ КИСЛОРОДА | 2022 |
|
RU2797932C1 |
| ВОДОЛАЗНЫЙ ДЫХАТЕЛЬНЫЙ АППАРАТ С ЗАМКНУТОЙ СХЕМОЙ ДЫХАНИЯ | 2001 |
|
RU2225322C2 |
| ИЗОЛИРУЮЩИЙ ДЫХАТЕЛЬНЫЙ АППАРАТ | 2002 |
|
RU2302973C2 |
| СИСТЕМА ГАЗОСНАБЖЕНИЯ ВОДОЛАЗОВ И ВОДОЛАЗНОГО КОЛОКОЛА | 2022 |
|
RU2831336C2 |
| ДЫХАТЕЛЬНЫЙ АППАРАТ ПОЛУЗАМКНУТОГО ТИПА | 2004 |
|
RU2330779C2 |
| СПОСОБ ТУШЕНИЯ ПОЖАРА В ОБИТАЕМЫХ ГИПЕРБАРИЧЕСКИХ ОБЪЕКТАХ | 2003 |
|
RU2275221C2 |
| ПОДВОДНЫЙ ДЫХАТЕЛЬНЫЙ АППАРАТ ДЛЯ СКАФАНДРА ВОДОЛАЗА | 2005 |
|
RU2311314C2 |
| Дыхательная система для водолаза | 1986 |
|
SU1722222A3 |
| СПОСОБ СПАСЕНИЯ ПОДВОДНИКОВ ИЗ АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2155700C2 |
| Аппаратно-программный комплекс для исследования регуляции дыхания и тренировки респираторной системы | 2023 |
|
RU2826608C1 |
Изобретение относится к области водолазного дела и касается конструкции дыхательного аппарата на дыхательных газовых смесях, приготавливаемых самим аппаратом. Дыхательный аппарат содержит дыхательный мешок и соединенные с ним через цепи управления баллоны с индифферентным газом и кислородом, блок измерения оксигенации крови, блок адаптации уставок к конкретному пользователю и два канала регулировки подачи кислорода в дыхательный мешок, основной и корректирующий. Каждый из каналов содержит блок сравнения, управляющий блок и регулирующий клапан подачи кислорода. В основном канале заданная уставка, соответствующая конкретному пользователю, выравнивается с показаниями датчиков парциального давления кислорода в дыхательном мешке, а в корректирующем канале заданная уставка сравнивается с датчиками оксигенации крови конкретного пользователя. По результатам сравнения производится дозированная подача кислорода в дыхательную смесь. Такое выполнение дыхательного аппарата обеспечивает повышение безопасности погружений за счет более эффективного управления формированием дыхательной смеси. 3 з.п. ф-лы, 1 ил.
| ФИГИЧЕВ А.И | |||
| и др | |||
| Аварийно-спасательные и судоподъемные средства | |||
| - Л.: Судостроение, 1979, с.192 и 193, рис.9.6 | |||
| US 3556098 А, 19.01.1971 | |||
| US 3727626 А, 17.04.1973 | |||
| Глубоководный дыхательный аппарат | 1978 |
|
SU753713A1 |

