Техническое решение относится к радиосвязи, а именно к способам передачи информации на подвижные объекты с неподвижного объекта, находящегося в начальном пункте общего маршрута движения подвижных объектов.
Известен способ спутниковой радиосвязи (см., например, О.В.Головин, Н.И.Чистяков, В.Шварц, И.Хардон Агиляр. Радиосвязь. Под ред. О.В.Головина. - М.: Горячая линия - Телеком, 2001, с.224-279), заключающийся в том, что передают радиосигналы с неподвижного объекта, принимают эти радиосигналы на искусственном спутнике Земли, передают эти радиосигналы с искусственного спутника Земли, принимают эти радиосигналы на подвижном объекте, передают радиосигналы с подвижного объекта, принимают эти радиосигналы на искусственном спутнике Земли, передают эти радиосигналы с искусственного спутника Земли, принимают эти радиосигналы на неподвижном объекте.
Указанный способ позволяет обеспечить большую дальность радиосвязи между наземным неподвижным объектом и подвижными объектами, находящимися на поверхности Земли или вблизи нее, независимо от их маршрутов движения, однако требует выведения спутников радиосвязи на околоземные орбиты и управления их движением и функционированием, что усложняет способ.
Вместе с тем значительные высоты орбит спутников (от сотен километров в системах с низкими околоземными орбитами до десятков тысяч километров в системах с высокоэллиптическими и геостационарными орбитами - см., например, Ю.М.Горностаев, В.В.Соколов, Л.М.Невдяев. Перспективные спутниковые системы связи. - М.: Горячая линия - Телеком, 2000, с. 71) требуют применения на космической станции, а также на неподвижном и подвижных объектах приемопередающих устройств большой мощности, оснащенных высоконаправленными антеннами.
Однако увеличение мощности приемопередающих устройств вызывает ухудшение их массогабаритных показателей, уменьшение помехоустойчивости различных радиоэлектронных средств, размещенных на неподвижном и подвижных объектах, а также снижение электромагнитной безопасности людей, находящихся на неподвижном и подвижных объектах.
Указанный недостаток в сочетании с ограниченными возможностями создания антенн с большим коэффициентом усиления приводит к увеличению объема геометрического пространства, занимаемого данной системой радиосвязи (размеры зоны покрытия земной поверхности одним лучом спутникового ретранслятора достигают сотен километров в диаметре - см. там же, с.78-110), что снижает эффективность способа в условиях одновременной эксплуатации нескольких систем радиосвязи.
Термин “объем геометрического пространства” характеризует одну из трех основных (наряду с полосой частот и временем работы) составляющих радиочастотного пространства, занимаемого системой радиосвязи (см. Н.А.Логинов. Актуальные вопросы радиоконтроля в Российской Федерации. - М.: Радио и связь, 2000, с.11-12).
Известен способ радиосвязи между наземным диспетчерским пунктом и летательным аппаратом (см., например, П.С.Давыдов, П.А.Иванов. Эксплуатация авиационного радиоэлектронного оборудования. Справочник. - М.: Транспорт, 1990, с.88-92), заключающийся в том, что передают радиосигналы с наземного диспетчерского пункта, принимают эти радиосигналы на летательном аппарате, передают радиосигналы с летательного аппарата, принимают эти радиосигналы на наземном диспетчерском пункте.
Указанный способ не требует решения сложных задач, присущих спутниковой радиосвязи, и позволяет обеспечить большую дальность радиосвязи с несколькими летательными аппаратами, совершающими полет на больших высотах по произвольным маршрутам.
Однако дальность радиосвязи с низколетящими летательными аппаратами существенно уменьшается в результате влияния отражения электромагнитных волн от поверхности Земли (см., например, Теоретические основы радиолокации. Под ред. В.Е.Дулевича. - М.: Советское радио, 1978, с.410).
Для увеличения дальности радиосвязи необходимо повышать мощности приемопередающих станций, размещенных на наземном диспетчерском пункте и летательных аппаратах, а также направленность антенн этих приемопередающих станций.
Однако увеличение мощности приемопередающих станций вызывает ухудшение их массогабаритных показателей, уменьшение помехоустойчивости различных радиоэлектронных средств, размещенных на диспетчерском пункте и летательных аппаратах, а также снижение электромагнитной безопасности людей, находящихся на диспетчерском пункте и летательных аппаратах.
Указанный недостаток в сочетании с ограниченными возможностями создания антенн с большим коэффициентом усиления приводит к увеличению объема геометрического пространства, занимаемого данной системой радиосвязи, что снижает эффективность способа в условиях одновременной эксплуатации нескольких систем радиосвязи.
Решаемой технической задачей является улучшение массогабаритных показателей приемопередающих станций подвижных объектов и неподвижного объекта, находящегося в начальном пункте общего маршрута движения подвижных объектов, увеличение помехоустойчивости различных радиоэлектронных средств, размещенных на неподвижном и подвижных объектах, повышение электромагнитной безопасности людей, находящихся на неподвижном и подвижных объектах, сокращение объема геометрического пространства, занимаемого данной системой радиосвязи, а следовательно, повышение эффективности способа в условиях одновременной эксплуатации нескольких систем радиосвязи на основе осуществления радиосвязи с помощью сбрасываемых с первого подвижного объекта маломощных промежуточных приемопередающих станций, оснащенных ненаправленными антеннами.
Решение технической задачи в способе радиосвязи между подвижными объектами и неподвижным объектом, находящимся в начальном пункте общего маршрута движения подвижных объектов, заключающемся в том, что передают на заданной рабочей частоте радиосигналы с неподвижного объекта, принимают на заданных рабочих частотах радиосигналы на подвижных объектах, достигается тем, что с момента времени первого удаления первого подвижного объекта от неподвижного объекта на расстояние, определяемое по заданным дальностям действия радиопередающей станции, размещенной на неподвижном объекте, и промежуточных приемопередающих станций, с первого подвижного объекта осуществляют сброс промежуточных приемопередающих станций с интервалами по дальности, определяемыми по заданным дальностям действия радиопередающей и промежуточных приемопередающих станций, при этом передача радиосигналов с неподвижного объекта на подвижные объекты состоит в том, что принимают переданные с неподвижного объекта радиосигналы на каждой из группы первых сброшенных с первого подвижного объекта промежуточных приемопередающих станций и передают их, принимают переданные с каждой из группы первых сброшенных с первого подвижного объекта промежуточных приемопередающих станций радиосигналы на каждой из группы других промежуточных приемопередающих станций, сброшенных с первого подвижного объекта в течение интервала времени, следующего за интервалом времени сброса с первого подвижного объекта группы первых промежуточных приемопередающих станций, и передают их, аналогичным образом осуществляют прием и передачу радиосигналов с помощью других групп сброшенных с первого подвижного объекта промежуточных приемопередающих станций по направлению передачи радиосигналов от сброшенных промежуточных приемопередающих станций в течение более ранних интервалов времени к сброшенным в течение более поздних интервалов времени, принимаемыми на первом подвижном объекте радиосигналами являются радиосигналы, переданные с каждой из группы последних сброшенных с первого подвижного объекта промежуточных приемопередающих станций, на других подвижных объектах, следующих по общему маршруту движения за первым подвижным объектом, принимают также радиосигналы, переданные со сброшенных с первого подвижного объекта промежуточных приемопередающих станций.
При передаче радиосигналов с неподвижного объекта на подвижные объекты заданными рабочими частотами радиосигналов, принимаемых на каждой из промежуточных приемопередающих станций каждой сброшенной с первого подвижного объекта группы, кроме первой группы сброшенных с первого подвижного объекта промежуточных приемопередающих станций, являются заданные рабочие частоты радиосигналов, передаваемых с промежуточных приемопередающих станций группы, сброшенной с первого подвижного объекта в течение ближайшего к интервалу времени сброса данной группы более раннего интервала времени, заданной рабочей частотой радиосигналов, принимаемых на каждой из промежуточных приемопередающих станций первой сброшенной с первого подвижного объекта группы, является заданная рабочая частота радиосигналов, передаваемых с неподвижного объекта, заданными рабочими частотами радиосигналов, принимаемых на первом подвижном объекте, являются заданные рабочие частоты радиосигналов, передаваемых с промежуточных приемопередающих станций последней сброшенной с первого подвижного объекта группы.
Термин “подвижный объект” является общепринятым (см., например, Соловьев Ю.А. Системы спутниковой навигации. - М.: Эко-трендз, 2000, с.49). К подвижным объектам относятся, в частности, средства наземного, водного и воздушного транспорта, оснащенные средствами радиосвязи, причем подвижные объекты могут не только находиться в движении, но и совершать остановки.
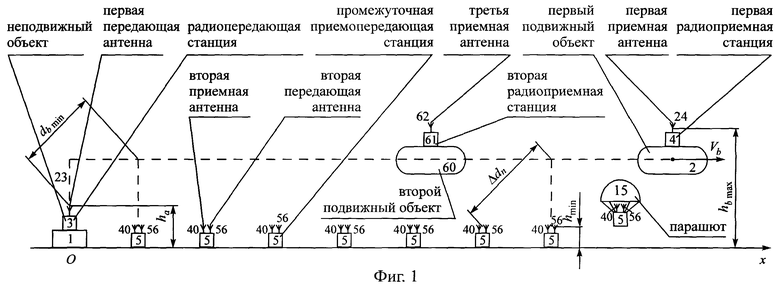
На фиг.1 условно изображены неподвижный объект, первый подвижный объект и вторые подвижные объекты, радиопередающая станция, первая радиоприемная станция и вторые радиоприемные станции, размещенные соответственно на неподвижном объекте, первом подвижном объекте и вторых подвижных объектах, промежуточные приемопередающие станции, сброшенные с первого подвижного объекта, для случая, при котором неподвижный объект является наземным диспетчерским пунктом, первый подвижный объект и вторые подвижные объекты являются низколетящими летательными аппаратами, число вторых подвижных объектов равно одному, число сброшенных с первого подвижного объекта промежуточных приемопередающих станций равно восьми.
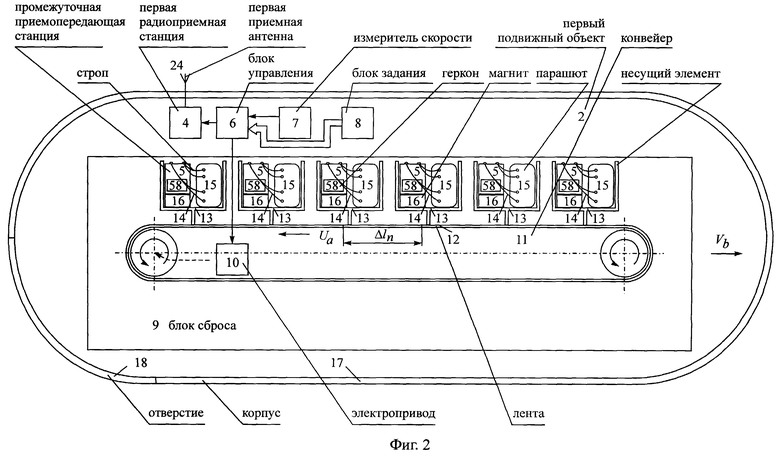
На фиг.2 условно изображены первая радиоприемная станция, блок управления, измеритель скорости, блок задания, блок сброса, содержащий электропривод, конвейер, размещенные на подвижном объекте, несущие элементы, закрепленные на ленте конвейера, магниты, закрепленные по одному в каждом из несущих элементов, промежуточные приемопередающие станции, размещенные по одной в каждом из несущих элементов, находящихся в верхнем положении, причем к каждой из этих промежуточных приемопередающих станций прикреплен с помощью стропов парашют для случая, при котором число промежуточных приемопередающих станций равно шести.
На фиг.3 условно изображена радиопередающая станция.
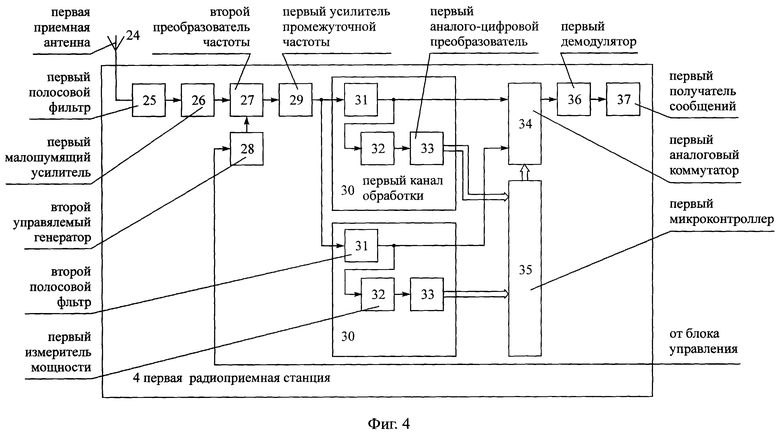
На фиг.4 условно изображена первая радиоприемная станция для случая, при котором число промежуточных приемопередающих станций в каждой группе промежуточных приемопередающих станций равно двум.
На фиг.5 условно изображен приемопередающий блок промежуточной приемопередающей станции для случая, при котором число промежуточных приемопередающих станций в каждой группе промежуточных приемопередающих станций равно двум.
На фиг.6 условно изображена промежуточная приемопередающая станция.
На фиг.7 условно изображена вторая радиоприемная станция.
Система для осуществления способа, представленная на фиг.1-7, содержит размещенные на неподвижном объекте 1 и на первом подвижном объекте 2 радиопередающую станцию 3 и первую радиоприемную станцию 4 соответственно, промежуточные приемопередающие станции 5, размещенные на первом подвижном объекте 2, блок 6 управления, измеритель 7 скорости, блок 8 задания, блок 9 сброса, размещенные на первом подвижном объекте 2, блок 9 сброса содержит электропривод 10, конвейер 11, на ленте 12 конвейера 11 закреплены несущие элементы 13, причем промежуточные приемопередающие станции 5 размещены по одной в каждом из несущих элементов 13, находящихся в верхнем положении, причем к каждой промежуточной приемопередающей станции 5, размещенной в несущем элементе 13, прикреплен с помощью стропов 14 парашют 15, уложенный в данном несущем элементе 13, блок 9 сброса содержит магниты 16, размещенные по одному в каждом из несущих элементов 13, корпус 17 первого подвижного объекта 2 имеет отверстие 18, радиопередающая станция 3 содержит источник 19 сообщений, первый преобразователь 20 частоты, первый гетеродин 21, первый усилитель 22 мощности, первую передающую антенну 23, первая радиоприемная станция 4 содержит первую приемную антенну 24, первый полосовой фильтр 25, первый малошумящий усилитель 26, второй преобразователь 27 частоты, управляемый генератор 28, первый усилитель 29 промежуточной частоты, первые каналы 30 обработки, число которых равно числу промежуточных приемопередающих станций 5 в группе промежуточных приемопередающих станций 5 с максимальным числом промежуточных приемопередающих станций 5, каждый из которых содержит второй полосовой фильтр 31, первый измеритель 32 мощности, первый аналого-цифровой преобразователь 33, первая радиоприемная станция 4 содержит также первый аналоговый коммутатор 34, первый микроконтроллер 35, первый демодулятор 36, первый получатель 37 сообщений, каждая промежуточная приемопередающая станция 5 содержит приемопередающий блок 38 и блок 39 питания, приемопередающий блок 38 содержит вторую приемную антенну 40, третий полосовой фильтр 41, второй малошумящий усилитель 42, третий преобразователь 43 частоты, второй гетеродин 44, второй усилитель 45 промежуточной частоты, вторые каналы 46 обработки, число которых равно числу промежуточных приемопередающих станций 5 в группе промежуточных приемопередающих станций 5 с максимальным числом промежуточных приемопередающих станций 5, каждый из которых содержит четвертый полосовой фильтр 47, второй измеритель 48 мощности, второй аналого-цифровой преобразователь 49, приемопередающий блок 38 содержит также второй аналоговый коммутатор 50, второй микроконтроллер 51, второй демодулятор 52, четвертый преобразователь 53 частоты, третий гетеродин 54, второй усилитель 55 мощности, вторую передающую антенну 56, блок 39 питания содержит электромагнитное реле 57, геркон 58, аккумулятор 59, система содержит также размещенные по одной на каждом втором подвижном объекте 60 вторые радиоприемные станции 61, каждая из которых содержит третью приемную антенну 62, пятый полосовой фильтр 63, третий малошумящий усилитель 64, пятый преобразователь 65 частоты, четвертый гетеродин 66, третий усилитель 67 промежуточной частоты, третьи каналы 68 обработки, число которых на единицу больше числа промежуточных приемопередающих станций 5, размещенных на первом подвижном объекте 2, причем каждый третий канал 68 обработки содержит шестой полосовой фильтр 69, третий измеритель 70 мощности, третий аналого-цифровой преобразователь 71, каждая вторая радиоприемная станция 61 содержит также третий аналоговый коммутатор 72, третий микроконтроллер 73, третий демодулятор 74, второй получатель 75 сообщений.
Выходы блока 8 задания и измерителя 7 скорости соединены с соответствующими входами блока 6 управления, один из выходов которого соединен с управляющим входом управляемого генератора 28 первой радиоприемной станции 4, другой выход блока 6 управления соединен с входом электропривода 10 конвейера 11, в радиопередающей станции 3 выход источника 19 сообщений соединен с первым входом первого преобразователя 20 частоты, второй вход которого соединен с выходом первого гетеродина 21, выход первого преобразователя 20 частоты соединен с входом первого усилителя 22 мощности, выход которого соединен с входом первой передающей антенны 23, в первой радиоприемной станции 4 выход первой приемной антенны 24 соединен с входом первого полосового фильтра 25, выход которого соединен с входом первого малошумящего усилителя 26, выход которого соединен с первым входом второго преобразователя 27 частоты, второй вход которого соединен с выходом управляемого генератора 28, выход второго преобразователя 27 частоты соединен с входом первого усилителя 29 промежуточной частоты, выход которого соединен с входами всех вторых полосовых фильтров 31, выход второго полосового фильтра 31 каждого первого канала 30 обработки соединен с соответствующим коммутируемым входом первого аналогового коммутатора 34 и с входом соответствующего первого измерителя 32 мощности, выход последнего соединен с входом соответствующего первого аналого-цифрового преобразователя 33, выходы которого соединены с соответствующими входами первого микроконтроллера 35, выходы которого соединены с управляющими входами первого аналогового коммутатора 34, выходы которого соединены с входом первого демодулятора 36, выход которого соединен с входом первого получателя 37 сообщений, в приемопередающем блоке 38 каждой промежуточной приемопередающей станции 5 выход второй приемной антенны 40 соединен с входом третьего полосового фильтра 41, выход которого соединен с входом второго малошумящего усилителя 42, выход которого соединен с первым входом третьего преобразователя 43 частоты, второй вход которого соединен с выходом второго гетеродина 44, выход третьего преобразователя 43 частоты соединен с входом второго усилителя 45 промежуточной частоты, выход которого соединен с входами всех четвертых полосовых фильтров 47, выход четвертого полосового фильтра 47 каждого второго канала 46 обработки соединен с соответствующим коммутируемым входом второго аналогового коммутатора 50 и с входом соответствующего второго измерителя 48 мощности, выход последнего соединен с входом соответствующего второго аналого-цифрового преобразователя 49, выходы которого соединены с соответствующими входами второго микроконтроллера 51, выходы которого соединены с управляющими входами второго аналогового коммутатора 50, выходы которого соединены с входом второго демодулятора 52, выход которого соединен с первым входом четвертого преобразователя 53 частоты, второй вход которого соединен с выходом третьего гетеродина 54, выход четвертого преобразователя 53 частоты соединен с входом второго усилителя 55 мощности, выход которого соединен с входом второй передающей антенны 56, в блоке 39 питания каждой промежуточной приемопередающей станции 5 первый вывод обмотки электромагнитного реле 57 соединен с положительным полюсом аккумулятора 59, второй вывод соединен с первым выводом геркона 58, второй вывод которого соединен с отрицательным полюсом аккумулятора 59, положительный полюс аккумулятора 59 соединен через нормально замкнутые контакты электромагнитного реле 57 с положительной клеммой питания приемопередающего блока 38, отрицательная клемма питания которого соединена с отрицательным полюсом аккумулятора 59, в каждой второй радиоприемной станции 61 выход третьей приемной антенны 62 соединен с входом пятого полосового фильтра 63, выход которого соединен с входом третьего малошумящего усилителя 64, выход которого соединен с первым входом пятого преобразователя 65 частоты, второй вход которого соединен с выходом четвертого гетеродина 66, выход пятого преобразователя 65 частоты соединен с входом третьего усилителя 67 промежуточной частоты, выход которого соединен с входами всех шестых полосовых фильтров 69, выход шестого полосового фильтра 69 каждого третьего канала 68 обработки соединен с соответствующим коммутируемым входом третьего аналогового коммутатора 72 и с входом третьего измерителя 70 мощности, выход которого соединен с входом третьего аналого-цифрового преобразователя 71, выходы которого соединены с соответствующими входами третьего микроконтроллера 73, выходы которого соединены с управляющими входами третьего аналогового коммутатора 72, выход которого соединен с входом третьего демодулятора 74, выход которого соединен с входом второго получателя 75 сообщений.
Дальность действия радиопередающей станции 3 задана по заданным дальностям действия промежуточных приемопередающих станций 5, частотой настройки первого гетеродина 21 является заданная частота передачи радиопередающей станции 3, частота настройки второго гетеродина 44 каждой промежуточной приемопередающей станции 5 отличается от заданной частоты приема данной промежуточной приемопередающей станции 5 на заданное значение промежуточной частоты последней, частотой настройки третьего гетеродина 54 каждой промежуточной приемопередающей станции 5 является заданная частота передачи данной промежуточной приемопередающей станции 5, отличная от заданных частот передачи других промежуточных приемопередающих станций 5, заданными частотами приема каждой из каждой группы промежуточных приемопередающих станций 5, размещенных на первом подвижном объекте 2, кроме группы промежуточных приемопередающих станций 5, размещенных на минимальном удалении вдоль конвейера 11 от отверстия 18, являются заданные частоты передачи группы промежуточных приемопередающих станций 5, размещенных на минимальном удалении от данной группы промежуточных приемопередающих станций 5 по направлению вдоль конвейера 11 к отверстию 18, заданной частотой приема каждой из группы промежуточных приемопередающих станций 5, размещенных на первом подвижном объекте 2 на минимальном удалении вдоль конвейера 11 от отверстия 18, является заданная частота передачи радиопередающей станции 3, размещенной на неподвижном объекте 1, частоты приема каждой из вторых радиоприемных станций 61 совпадают с соответствующими частотами передачи радиопередающей станции 3 и промежуточных приемопередающих станций 5.
Сущность способа заключается в следующем.
Рассмотрим ситуацию, при которой неподвижным объектом 1 является наземный диспетчерский пункт, первым подвижным объектом 2 и вторыми подвижными объектами 60 являются низколетящие летательные аппараты, например вертолеты или дирижабли.
Маршруты движения первого подвижного объекта 2 и вторых подвижных объектов 60 совпадают.
Вторые подвижные объекты 60 следуют по общему маршруту движения за первым подвижным объектом 2.
Термин “низколетящий летательный аппарат” является общепринятым (см., например, Радиотехнические системы. Под ред. проф. Ю.М.Казаринова. - М.: Высшая школа, 1990, с.221). первый подвижный объект 2, в частности летательный аппарат, является низколетящим, если выполняется условие (см. Теоретические основы радиолокации. Под ред. В.Е.Дулевича. - М.: Советское радио, 1978, с.410)

где с - скорость света; hа - высота расположения первой передающей антенны 23 радиопередающей станции 3, размещенной на неподвижном объекте 1; hb - высота расположения первой приемной антенны 24 первой радиоприемной станции 4, размещенной на первом подвижном объекте 2; d - расстояние между неподвижным объектом 1 и первым подвижным объектом 2.
Выражение (1) справедливо, если выполняется условие зеркального отражения радиоволн от подстилающей поверхности (см. там же, с.405)

где ψ - угол скольжения; δ - высота неровностей подстилающей поверхности.
Для определенности примем, что подстилающая поверхность, являющаяся поверхностью Земли, представляет собой зеркально отражающую горизонтальную плоскость, т.е. условие (2) выполняется.
На первом подвижном объекте 2 размещают первую радиоприемную станцию 4 и N промежуточных приемопередающих станций 5 с номерами n=1,2,...,N, где n - целые положительные числа.
В общем случае с первого подвижного объекта 2 в каждой точке сброса могут осуществлять сброс по несколько промежуточных приемопередающих станций 5.
Примем, что с первого подвижного объекта 2 в каждой точке сброса осуществляют сброс только по одной промежуточной приемопередающей станции 5.
Более ранним моментам времени сброса промежуточных приемопередающих станций 5 с первого подвижного объекта 2 соответствуют промежуточные приемопередающие станции 5 с меньшими номерами

где tn, tv - моменты времени сброса n-й и v-й промежуточных приемопередающих станций 5 соответственно; v=1,2,...,N - целые положительные числа.
На первом подвижном объекте 2 отсчет времени tb ведут от момента времени f
В начальном пункте О маршрута движения первого подвижного объекта 2 и вторых подвижных объектов 60 находится неподвижный объект 1 (фиг.1).
Последней сброшенной с первого подвижного объекта 2 промежуточной приемопередающей станцией 5 является промежуточная приемопередающая станция 5, сброс которой осуществлен в наиболее поздний момент времени

где nmax=1,2... ,N.
Совокупность промежуточных приемопередающих станций 5, сбрасываемых с первого подвижного объекта 2, разбивают условно на J групп.
Каждая промежуточная приемопередающая станция 5 может входить в состав только одной группы.
В j-й группе промежуточных приемопередающих станций 5, сбрасываемых с первого подвижного объекта 2, количество Qj промежуточных приемопередающих станций 5 в общем случае произвольно, но ограничено условием
1≤ Qj≤N, (5)
где j=1,2,...,J - целые положительные числа.
Примем, что все группы промежуточных приемопередающих станций 5 содержат одинаковое число промежуточных приемопередающих станций 5
Qj=Q для всех j. (6)
Следовательно, N кратно Q.
В связи с этим количество групп промежуточных приемопередающих станций 5, сбрасываемых с первого подвижного объекта 2, равно

Условное разбиение сбрасываемых с первого подвижного объекта 2 промежуточных приемопередающих станций 5 на группы осуществляют в соответствии с формулой
n=(j-1)Q+1,(j-l)Q+2,...,jQ, (8)
где n - номера промежуточных приемопередающих станций 5, входящих в j-ю группу.
Сброс с первого подвижного объекта 2 промежуточных приемопередающих станций 5 j-й группы занимает следующий интервал времени:

Группа последних сброшенных с первого подвижного объекта 2 промежуточных приемопередающих станций 5 включает последнюю сброшенную промежуточную приемопередающую станцию 5. Их номера определяет формула
n=(jmах-1)Q+1 (jmах-1)0+2,...,kmах (10)
Примем вначале, что
Q=1. (11)
При выполнении условия (2) дальность действия n-й сброшенной с первого подвижного объекта 2 промежуточной приемопередающей станции 5 кроме последней сброшенной с первого подвижного объекта 2 промежуточной приемопередающей станции 5 (n=nmax) равна
где Pn изл - мощность радиосигналов, передаваемых с n-й сброшенной промежуточной приемопередающей станции 5; Pn+1пр.мин - некоторая пороговая величина, характеризующая чувствительность (n+1)-й сброшенной промежуточной приемопередающей станции 5; hn, hn+1 - высоты расположения второй передающей антенны 56 n-й и второй приемной антенны 40 (n+1)-й сброшенных промежуточных приемопередающих станций 5 соответственно.
Дальность действия последней сброшенной с первого подвижного объекта 2 промежуточной приемопередающей станции 5 равна

где  мощность радиосигналов, передаваемых с последней сброшенной с первого подвижного объекта 2 промежуточной приемопередающей станции 5; Рb пр.мин - некоторая пороговая величина, характеризующая чувствительность первой радиоприемной станции 4 первого подвижного объекта 2;
мощность радиосигналов, передаваемых с последней сброшенной с первого подвижного объекта 2 промежуточной приемопередающей станции 5; Рb пр.мин - некоторая пороговая величина, характеризующая чувствительность первой радиоприемной станции 4 первого подвижного объекта 2;  - высота расположения второй передающей антенны 56 последней сброшенной с первого подвижного объекта 2 промежуточной приемопередающей станции 5.
- высота расположения второй передающей антенны 56 последней сброшенной с первого подвижного объекта 2 промежуточной приемопередающей станции 5.
Дальность действия радиопередающей станции 3 неподвижного объекта 1 равна

где Ра изл - мощность радиосигналов, передаваемых с неподвижного объекта 1; Рn пр.мин| n=1 - некоторая пороговая величина, характеризующая чувствительность первой сброшенной с первого подвижного объекта 2 промежуточной приемопередающей станции 5; hn| n=1 - высота расположения второй приемной антенны 40 первой сброшенной с первого подвижного объекта 2 промежуточной приемопередающей станции 5.
Под высотой расположения антенны понимаем расстояние до находящейся под антенной точки подстилающей поверхности.
Значение высоты ha расположения первой передающей антенны 23 радиопередающей станции 3 фиксировано и определяется особенностями конструкций и компоновки неподвижного объекта 1 и радиопередающей станции 3.
Высота hb расположения первой приемной антенны 24 первой радиоприемной станции 4 изменяется в диапазоне от hb min до hb max. Минимальное значение высоты hb min достигается, когда первый подвижный объект 2 находится на подстилающей поверхности, и определяется особенностями конструкций и компоновки первого подвижного объекта 2 и первой радиоприемной станции 4. Максимальное значение высоты hb max не превышает сумму значений hb min и максимальной высоты полета hb max первого подвижного объекта 2.
Высоты hn расположения вторых приемных антенн 40 и вторых передающих антенн 56 сброшенных с первого подвижного объекта 2 промежуточных приемопередающих станций 5 изменяются в диапазоне значений от hb min до hb max. Минимальное значение высоты hn min достигается, когда n-я промежуточная приемопередающая станция 5 находится на подстилающей поверхности, и определяется особенностями конструкции данной промежуточной приемопередающей станции 5. Максимальное значение высоты hn max соответствует моменту времени сброса n-й промежуточной приемопередающей станции 5 с первого подвижного объекта 2 и не превышает величины hb max.
Поскольку маршруты движения вторых подвижных объектов 60 совпадают с маршрутом движения первого подвижного объекта 2, примем, что минимальные hc min и максимальные hc max значения высот расположения третьих приемных антенн 62 вторых радиоприемных станций 61, размещенных на вторых подвижных объектах 60, совпадают соответственно с минимальным hb min и максимальным hb max значениями высот расположения первой приемной антенны 24 первой радиоприемной станции 4, размещенной на первом подвижном объекте 2. Кроме того, примем, что чувствительности вторых радиоприемных станций 61 равны Pс пр.мин.
Формулы (1), (13) остаются справедливыми при замене в них параметров первой радиоприемной станции 4 на параметры вторых радиоприемных станций 61.
Выражения (1), (2) и (12) - (14) являются приближенными и не учитывают геометрию неподвижного объекта 1, первого подвижного объекта 2, вторых подвижных объектов 60 и промежуточных приемопередающих станций 5.
С учетом изложенного примем, что для всех n справедливы равенства
ha=hn min=hb min=hc min=hmin, (15)
hn max=hb max=hc max=hmax, (16)
Pn пр.мин=Pb пр.мин=Pс пр.мин=Pпр.мин, (17)
Pа изл=Pn изл=Pизл. (18)
Из выражений (12), (13) следует, что при выполнении условий (11), (15)-(18) минимально допустимая дальность действия промежуточных приемопередающих станций 5 равна

Далее полагаем, что Q > 1; N кратно Q.
По заданным величинам Ризл, Рпр.мин c учетом формулы (19) дальности действия промежуточных приемопередающих станций 5 задают равными
Rn=RQmin=(2Q-1)Rmin. (20)
Дальность действия радиопередающей станции 3 задают по заданным значениям дальностей действия промежуточных приемопередающих станций 5, например, по формуле
Ra=RQ min=(2Q-1)Rmin. (21)
В общем случае при движении по маршруту первый подвижный объект 2 и вторые подвижные объекты 60 могут совершать остановки на произвольные по продолжительности интервалы времени.
Предположим, что первый подвижный объект 2 осуществляет из начального пункта О, в котором находится неподвижный объект 1, вертикальный подъем на высоту hb max, а затем совершает горизонтальный полет на высоте hb max c постоянной скоростью Vb, вдоль оси х по направлению в сторону возрастающих значений х; максимальное расстояние от неподвижного объекта 1 до первого подвижного объекта 2 равно db max и характеризует протяженность маршрута движения первого подвижного объекта 2.
До момента времени tb min первого удаления первого подвижного объекта 2 от неподвижного объекта 1 на расстояние db min с первого подвижного объекта 2 сброс промежуточных приемопередающих станций 5 не осуществляют. При этом осуществление способа состоит в том, что передают радиосигналы с неподвижного объекта 1, принимают эти радиосигналы на первом подвижном объекте 2.
Величину db min определяют по заданным дальностям Rn=RQ min=(2Q-1)Rmin действия промежуточных приемопередающих станций 5.
В частности, величину db min можно задать равной

где k1≥1 - коэффициент запаса, учитывающий приближенный характер применяемых формул.
С момента времени hb min первого удаления первого подвижного объекта 2 от неподвижного объекта 1 на расстояние db min c первого подвижного объекта 2 осуществляют сброс промежуточных приемопередающих станций 5 с интервалами по дальности, определяемыми по заданным дальностям действия радиопередающей станции 3 и промежуточных приемопередающих станций 5.
В силу принятых допущений интервал сброса промежуточных приемопередающих станций 5 с первого подвижного объекта 2 может равняться

где k2≥1 - коэффициент запаса.
Сброс первой промежуточной приемопередающей станции 5 с первого подвижного объекта 2 осуществляют в момент времени hb min первого удаления первого подвижного объекта 2 от неподвижного объекта 1 на расстояние db min.
Расстояния от неподвижного объекта 1 до первого подвижного объекта 2, на которых осуществляют сброс промежуточных приемопередающих станций 5, можно измерять на первом подвижном объекте 2 с помощью инерциальных или доплеровских систем счисления пути (см. там же, с.6-8).
При заданных ранее характеристиках движения первого подвижного объекта 2 сброс n-й промежуточной приемопередающей станции 5 осуществляют в момент времени

причем

где τ h max - время вертикального подъема первого подвижного объекта 2 из начального пункта О на высоту hmax.
Формула (24) обусловлена тем, что интервалы по дальности Δ dn определяют максимально возможные расстояния между двумя промежуточными приемопередающими станциями 5, сброшенными с первого подвижного объекта 2 в ближайшие моменты времени.
Формула (25) обусловлена тем, что дальность db min определяет максимально возможное расстояние от первого подвижного объекта 2 до неподвижного объекта 1, соответствующее моменту времени tb min.
В общем случае первый подвижный объект 2 может совершать движение по сложному маршруту. В частности, он может вначале удаляться от неподвижного объекта 1, а затем приближаться к нему, затем вновь удаляться и приближаться и т.д. При этом первый подвижный объект 2 может многократно проходить через начальный пункт О, в котором находится неподвижный объект 1, и, следовательно, многократно находится от него на расстоянии, меньшем db min. Однако сброс промежуточных приемопередающих станций 5 с первого подвижного объекта 2 не осуществляют только до момента времени первого удаления первого подвижного объекта 2 от неподвижного объекта 1 на расстояние db min. С данного момента времени с первого подвижного объекта 2 осуществляют сброс промежуточных приемопередающих станций 5 с интервалами по дальности, определяемыми по заданным дальностям действия радиопередающей станции 3 и промежуточных приемопередающих станций 5, причем сброс промежуточных приемопередающих станций 5 осуществляют и в том случае, если в результате движения первого подвижного объекта 2 по маршруту расстояние до неподвижного объекта 1 вновь станет меньше величины db min.
Если скорость ветра пренебрежимо мала, скорость Vb движения первого подвижного объекта 2 также настолько мала, что не вызывает существенного возмущения воздушных масс, то траектории падения промежуточных приемопередающих станций 5 можно принять вертикальными. При этом аэродинамические свойства конструкций промежуточных приемопередающих станций 5 не должны иметь каких-либо особенностей, вызывающих существенное отклонение траекторий падения от вертикальных.
После падения на подстилающую поверхность промежуточные приемопередающие станции 5 остаются неподвижными.
Коэффициент запаса k2 учитывает возможную неточность разброса промежуточных приемопередающих станций 5, обусловленную влиянием различных факторов.
Возможны два характерных случая:
tb&λτ;tb min; (26,а)
tb≥tb min; (26,б)
При движении первого подвижного объекта 2 по маршруту, продолжительность которого равна  выполняются оба условия (26, а), (26, б). При этом в каждый момент времени выполняется только одно из указанных условий. Кроме того, в силу необратимости времени, если наступило условие (26, б), то условие (26, а) уже не наступит. Таким образом, из изложенного следует, что способ может быть осуществлен лишь единственным образом.
выполняются оба условия (26, а), (26, б). При этом в каждый момент времени выполняется только одно из указанных условий. Кроме того, в силу необратимости времени, если наступило условие (26, б), то условие (26, а) уже не наступит. Таким образом, из изложенного следует, что способ может быть осуществлен лишь единственным образом.
В первом случае (26, а) с первого подвижного объекта 2 сброс промежуточных приемопередающих станций 5 не осуществляют. Осуществление способа в данном случае рассмотрено выше.
Рассмотрим осуществление способа в случае (26, б), которому соответствует сброс промежуточных приемопередающих станций 5 с первого подвижного объекта 2.
С неподвижного объекта 1 передают радиосигналы. Принимают переданные с неподвижного объекта 1 радиосигналы на каждой из группы первых (n=1,2,...,Q) сброшенных с первого подвижного объекта 2 промежуточных приемопередающих станций 5 и передают их. Принимают переданные с каждой из группы первых (n=l,2,...,Q) сброшенных с первого подвижного объекта 2 промежуточных приемопередающих станций 5 радиосигналы на каждой из группы других (n=Q+l,Q+2,...,2Q) промежуточных приемопередающих станций 5, сброшенных с первого подвижного объекта 2 в течение интервала времени tn| n=Q+1&λτ;tb≤tn| n=2Q следующего за интервалом времени tn| n=1&λτ;tb≤tn| n=Q сброса с первого подвижного объекта 2 группы первых (n=l,2,...,Q) промежуточных приемопередающих станций 5, и передают их. Аналогичным образом осуществляют прием и передачу радиосигналов с помощью других (j=3,4,…,jmax) групп сброшенных с первого подвижного объекта 2 промежуточных приемопередающих станций 5 по направлению передачи радиосигналов от сброшенных промежуточных приемопередающих станций 5 в течение более ранних интервалов времени tn| n=(j-1)Q+1&λτ;tb≤tn| n=jQ к сброшенным в течение более поздних интервалов времени tn| n=jQ+1&λτ;tb≤tn| n=(j+1)Q.
Принимают на первом подвижном объекте 2 радиосигналы, переданные с каждой из группы последних (n=(jmax-1)Q+1,(jmax-1)Q+2,…,nmax) сброшенных с первого подвижного объекта 2 промежуточных приемопередающих станций 5.
Каждая промежуточная приемопередающая станция 5 начинает функционировать в момент сброса и продолжает функционировать до и после соприкосновения с подстилающей поверхностью.
При снижении промежуточных приемопередающих станций 5 их дальности действия и дальность действия радиопередающей станции 3 сокращаются, но в соответствии с формулами (12)-(21) не становятся меньше величины RQ min.
Спустя некоторое время после начала движения первого подвижного объекта 2 начинают движение вторые подвижные объекты 60. Их маршруты движения совпадают с маршрутом движения первого подвижного объекта 2. При этом вторые подвижные объекты 60 следуют за первым подвижным объектом 2, не обгоняя его.
На вторых подвижных объектах 60, следующих по общему маршруту движения за первым подвижным объектом 2, осуществляют прием радиосигналов, переданных с неподвижного объекта 1 и со сброшенных с первого подвижного объекта 2 промежуточных приемопередающих станций 5.
При этом, если с первого подвижного объекта 2 еще не сброшено ни одной промежуточной приемопередающей станции 5 (случай 26, а), а вторые подвижные объекты 60 уже начали движение по маршруту, то на вторых подвижных объектах 60 осуществляют прием радиосигналов, переданных с неподвижного объекта 1 (данный признак присущ прототипу, в связи с чем он включен в общую часть заявленной формулы изобретения). Если с первого подвижного объекта 2 уже осуществляют сброс промежуточных приемопередающих станций 5 (случай 26, б) и вторые подвижные объекты 60 уже начали движение по маршруту, то на вторых подвижных объектах 60 в зависимости от их местоположения на маршруте движения осуществляют прием радиосигналов, переданных с неподвижного объекта 1 и со сброшенных с первого подвижного объекта 2 промежуточных приемопередающих станций 5.
При движении первого подвижного объекта 2, вторых подвижных объектов 60 и сбрасываемых промежуточных приемопередающих станций 5 возникает эффект Допплера, отрицательное влияние которого на качество радиосвязи можно устранить путем рационального выбора частотных характеристик сигналов и устройств радиопередающей станции 3, первой радиоприемной станции 4, вторых радиоприемных станций 61 и промежуточных приемопередающих станций 5.
При осуществлении способа в условиях пересеченной местности для определения точек сброса промежуточных приемопередающих станций 5 необходимо учитывать информацию о поле высот рельефа местности. Для этого на первом подвижном объекте 2 можно использовать обзорно-сравнительные системы радионавигации (см. Авиационная радионавигация: Справочник. Под ред. А.А.Сосновского. - М.: Транспорт, 1990, с.8-9).
Подстилающей поверхностью может являться водная поверхность. В этом случае при осуществлении способа необходимо обеспечивать удержание промежуточных приемопередающих станций 5 на поверхности воды после падения. Кроме того, при задании дальностей действия радиопередающей станции 3 и промежуточных приемопередающих станций 5 следует учитывать волнение водной поверхности и возможные течения.
Под термином “рабочая частота” понимаем значение частоты несущего колебания, центральное или какое-либо другое характерное значение частоты полосы частот радиосигналов. При этом полосы частот радиосигналов, соответствующие различным рабочим частотам, не перекрываются.
При произвольном маршруте движения первого подвижного объекта 2 и вторых подвижных объектов 60 заданные рабочие частоты радиосигналов, передаваемых в одно и то же время с неподвижного объекта 1 и с каждой из промежуточных приемопередающих станций 5, сброшенных с первого подвижного объекта 2, должны быть различными
fb≠fn≠fv для всех n ≠ ν . (27)
При передаче радиосигналов с неподвижного объекта 1 на первый подвижный объект 2 и на вторые подвижные объекты 60 заданными рабочими частотами  радиосигналов, принимаемых на каждой из промежуточных приемопередающих станций 5 j-й сброшенной с первого подвижного объекта 2 группы, кроме первой (j=1) группы сброшенных с первого подвижного объекта 2 промежуточных приемопередающих станций 5, являются заданные рабочие частоты
радиосигналов, принимаемых на каждой из промежуточных приемопередающих станций 5 j-й сброшенной с первого подвижного объекта 2 группы, кроме первой (j=1) группы сброшенных с первого подвижного объекта 2 промежуточных приемопередающих станций 5, являются заданные рабочие частоты  радиосигналов, передаваемых с промежуточных приемопередающих станций 5 (j-1)-й группы, сброшенной с первого подвижного объекта 2 в течение ближайшего к интервалу времени
радиосигналов, передаваемых с промежуточных приемопередающих станций 5 (j-1)-й группы, сброшенной с первого подвижного объекта 2 в течение ближайшего к интервалу времени  сброса данной (y-й) группы более раннего интервала времени
сброса данной (y-й) группы более раннего интервала времени 

при tb≥tb min; j≠ 1, (28)
где q=1,2,...,Q - целые положительные числа
Заданной рабочей частотой радиосигналов, принимаемых на каждой из промежуточных приемопередающих станций 5 первой (j=1) сброшенной с первого подвижного объекта 2 группы, является заданная рабочая частота fa радиосигналов, передаваемых с неподвижного объекта 1

Заданными рабочими частотами f’b1,f’b2,…,f’bQ радиосигналов, принимаемых на первом подвижном объекте 2, являются заданные рабочие частоты  радиосигналов, передаваемых с промежуточных приемопередающих станций 5 последней (j=jmах) сброшенной с первого подвижного объекта 2 группы, если с первого подвижного объекта 2 сброшена хотя бы одна промежуточная приемопередающая станция 5, или, в противном случае, заданная рабочая частота fa радиосигналов, передаваемых с неподвижного объекта 1 (данный признак присущ прототипу, в связи с чем он включен в общую часть заявленной формулы изобретения)
радиосигналов, передаваемых с промежуточных приемопередающих станций 5 последней (j=jmах) сброшенной с первого подвижного объекта 2 группы, если с первого подвижного объекта 2 сброшена хотя бы одна промежуточная приемопередающая станция 5, или, в противном случае, заданная рабочая частота fa радиосигналов, передаваемых с неподвижного объекта 1 (данный признак присущ прототипу, в связи с чем он включен в общую часть заявленной формулы изобретения)

Заданными рабочими частотами радиосигналов, принимаемых на вторых подвижных объектах 60, следующих по общему маршруту движения за первым подвижным объектом 2, являются заданные рабочие частоты радиосигналов, передаваемых с неподвижного объекта 1 и со сброшенных с первого подвижного объекта 2 промежуточных приемопередающих станций 5.
При этом мощность радиосигналов, принимаемых на вторых подвижных объектах 60, зависит от местоположения вторых подвижных объектов 60 на маршруте движения.
Из изложенного следует, что рабочие частоты радиосигналов, передаваемых с неподвижного объекта 1, радиосигналов, принимаемых на промежуточных приемопередающих станциях 5 и передаваемых с них, радиосигналов, принимаемых на вторых подвижных объектах 60, могут быть фиксированными.
Вместе с тем при сбросе с первого подвижного объекта 2 промежуточных приемопередающих станций 5 очередной (j=jmах) группы заданные рабочие частоты f’b1,f’b2,…,f’bQ радиосигналов, принимаемых на первом подвижном объекте 2, должны совпадать с заданными рабочими частотами  радиосигналов, передаваемых с промежуточных приемопередающих станций 5 данной (j=jmax) группы.
радиосигналов, передаваемых с промежуточных приемопередающих станций 5 данной (j=jmax) группы.
Кроме того, для осуществления радиосвязи между неподвижным объектом 1 и первым подвижным объектом 2 в ситуации (26, а), при которой еще не сброшено ни одной промежуточной приемопередающей станции 5, заданная рабочая частота fa радиосигналов, передаваемых с неподвижного объекта 1, должна совпадать с одной из заданных рабочих частот f’b1,f’b2,…,f’bQ радиосигналов, принимаемых на первом подвижном объекте 2.
Все элементы и блоки, входящие в состав системы, представленной на фиг.1-7, являются известными и описанными в литературе.
В качестве измерителя 7 скорости на первом подвижном объекте 2, являющемся, в частности, низколетящим летательным аппаратом, может использоваться доплеровский измеритель скорости и угла сноса или инерциальный измеритель скорости (см. Авиационная радионавигация: Справочник. Под ред. А.А.Сосновского. - М.: Транспорт, 1990, с.6-8).
В качестве блока 8 задания могут использоваться какие-либо известные и описанные в литературе цифровые устройства ввода данных (см., например, Шевкопляс Б.В. Микропроцессорные структуры. Инженерные решения. - М.: Радио и связь, 1993, с.27).
В качестве блока 6 управления могут использоваться микропроцессорные системы с аналоговыми и цифровыми входами и выходами, в состав которых входят тактовый генератор, запоминающие устройства, аналого-цифровые и цифроаналоговые преобразователи и другие устройства (см., например, П.Хоровиц, У.Хилл. Искусство схемотехники. - М.: Мир, 1993, с.294-295), не изображенные на фиг.2.
В качестве каждого из первых измерителей 32 мощности, вторых измерителей 48 мощности и третьих измерителей 70 мощности могут использоваться последовательно соединенные блок возведения в квадрат и интегратор (см., например, Дж.Бендат, А.Пирсол. Прикладной анализ случайных данных. - М.: Мир, 1983, с.143).
Блок 9 сброса предназначен для осуществления сброса промежуточных приемопередающих станций 5 с заданным интервалом по дальности.
В качестве конвейера 11 применен ленточный конвейер с горизонтально замкнутой трассой (см., например, Конвейеры. Справочник. Под общей редакцией Ю.А.Пертена. - Л.: Машиностроение, 1984,с.4-9).
Конвейер 11 предназначен для перемещения промежуточных приемопередающих станций 5, размещенных в несущих элементах 13, по направлению к отверстию 18.
Электропривод 10 предназначен для приведения в движение ленты 12 конвейера 11 со скоростью, соответствующей сигналам, формируемым блоком 6 управления.
Электропривод 10 является автоматизированным. Системы управления автоматизированных электроприводов обеспечивают заданную угловую скорость вращения вала электродвигателя в соответствии с внешними управляющими сигналами, которые в зависимости от вида электродвигателя и системы управления могут быть аналоговыми и цифровыми (см., например, Политехнический словарь. Редкол.: А.Ю.Ишлинский (гл. ред.) и др. - 3-е изд., перераб. и доп.- М.: П50 “Большая Российская энциклопедия”, 1998, с.13). Конструкции электроприводов известны (см., например. Конвейеры. Справочник. Под общей редакцией Ю.А.Пертена. - Л.: Машиностроение, 1984, с.87-91).
Мощность сигналов, формируемых блоком 6 управления, достаточна для управления работой электропривода 10.
Конструкция блока 9 сброса обеспечивает беспрепятственное перемещение промежуточных приемопередающих станций 5 к отверстию 18 при их сбросе.
Размеры отверстия 18 превышают габаритные размеры каждой промежуточной приемопередающей станции 5 совместно с прикрепленным к ней уложенным парашютом 15.
Количество несущих элементов 13, находящихся в исходном верхнем положении, равно N числу промежуточных приемопередающих станций 5, размещенных на первом подвижном объекте 2.
Верхнему положению несущих элементов 13 соответствует их положение над продольной осью симметрии конвейера 11.
В общем случае в блоке 9 сброса для загрузки в них промежуточных приемопередающих станций 5 могут быть применены известные загрузочные устройства (см., например, Конвейеры. Справочник. Под общей редакцией Ю.А.Пертена. - Л.: Машиностроение, 1984, с.97-100).
Несущие элементы 13 закреплены вдоль конвейера 11с интервалом, равным Δ ln.
Закрепленные в несущих элементах 13 магниты 16 представляют собой пластины из магнитотвердых материалов.
Промежуточные приемопередающие станции 5 размещают в несущих элементах 13 в непосредственной близости от магнитов 16, магнитное поле которых обеспечивает замыкание контактов герконов 58, однако пренебрежимо мало по своему влиянию на движение промежуточных приемопередающих станций 5 при их сбросе.
Первая передающая антенна 23, первая приемная антенна 24, вторая приемная антенна 40 и вторая передающая антенна 56 являются ненаправленными.
Конструкции промежуточных приемопередающих станций 5 разрабатывают с учетом ударных нагрузок, возникающих при столкновении с подстилающей поверхностью (см., например, В.Б.Карпушин. Вибрации и удары в радиоаппаратуре. - М.: Советское радио, 1971, с.155 216). В связи с этим вторые приемные антенны 40 и вторые передающие антенны 56 промежуточных приемопередающих станций 5 могут размещаться внутри ударопрочных радиопрозрачных корпусов, выполненных, например, из фторопласта.
Парашюты 15 служат для уменьшения скорости падения промежуточных приемопередающих станций 5, а следовательно, для уменьшения ударных нагрузок, возникающих при их столкновении с подстилающей поверхностью.
Укладка парашютов 15 в несущих элементах 13 исключает спутывание стропов 14 при сбросе промежуточных приемопередающих станций 5.
Физические и геометрические характеристики парашютов 15 (проницаемость, упругость ткани купола, форма и площадь купола, наличие и форма вырезов и др.) определяют исходя из массы промежуточных приемопередающих станций 5 и требуемой динамики парашютов 15 (см., например, Ю.А.Шевляков, В.Н.Тищенко, В.А.Темненко. Динамика парашютных систем. - Киев, Одесса: “Вища школа”. Головное изд-во, 1985). Конструкция и характеристики парашютов 15 предполагают их автоматическое раскрытие при сбросе промежуточных приемопередающих станций 5.
Источником 19 сообщений может служить устройство последовательного вывода цифровых сигналов, а первым получателем 37 сообщений и вторыми получателями 75 сообщений - устройства последовательного ввода цифровых сигналов (см., например, Цифровые и аналоговые интегральные микросхемы. Справочник. Под ред. С.В.Якубовского. - М.: Радио и связь, 1990, с.151).
Напряжение питания радиопередающей станции 3 вырабатывает система электроснабжения неподвижного объекта 1, не изображенная на фиг.1-7.
Напряжение питания первой радиоприемной станции 4, блока 8 задания, измерителя 7 скорости, блока 6 управления и электропривода 10 вырабатывает бортовая система электроснабжения первого подвижного объекта 2, не изображенная на фиг.1-7.
Напряжение питания каждой второй радиоприемной станции 61 вырабатывает бортовая система электроснабжения соответствующего второго подвижного объекта 60, не изображенная на фиг.1-7.
Каждый из аккумуляторов 59 предназначен для формирования напряжения питания соответствующей промежуточной приемопередающей станции 5. Емкость аккумулятора 59 задают исходя из потребляемой мощности соответствующей промежуточной приемопередающей станции 5 и продолжительности эксплуатации системы.
Частотами передачи радиопередающей станции 3 и промежуточных приемопередающих станций 5 являются заданные рабочие частоты радиосигналов, передаваемых соответственно с радиопередающей станции 3 и с промежуточных приемопередающих станций 5.
Частотами приема первой радиоприемной станции 4, вторых радиоприемных станций 61 и промежуточных приемопередающих станций 5 являются заданные рабочие частоты радиосигналов, принимаемых соответственно на первой радиоприемной станции 4, на вторых радиоприемных станциях 61 и на промежуточных приемопередающих станциях 5.
Термины “частота передачи” и “частота приема” какого-либо устройства являются общепринятыми (см., например, Громаков Ю.А. Стандарты и системы подвижной радиосвязи. - М.: Эко-Трендз, 2000, с.22).
Термин “управляемый генератор” является общепринятым (см., например, Теоретические основы радиолокации. Под ред. В.Е.Дулевича. - М.: Советское радио, 1978, с.358). Частота колебаний, формируемых управляемым генератором, определяется напряжением, действующим на его управляющем входе. В этом случае управляемый генератор является генератором, управляемым по напряжению. Генераторы, управляемые по напряжению, являются известными и описанными в литературе устройствами (см., например, Хоровиц П., Хилл. У. Искусство схемотехники. В 3-х томах: T.1. Пер. с англ. - 4-е изд. перераб. и доп. - М.: Мир, 1993, с.308).
Рассмотрим осуществление способа с помощью системы, представленной на фиг.1-7.
Первый подвижный объект 2 и вторые подвижные объекты 60 находятся в начальном пункте О общего маршрута. В начальном пункте О общего маршрута движения первого подвижного объекта 2 и вторых подвижных объектов 60 находится неподвижный объект 1.
Конвейер 11 приведен в начальное состояние, при котором несущий элемент 13, ближайший к отверстию 18, должен пройти путь, равный lb min точки, в которой происходит отрыв соответствующей промежуточной приемопередающей станции 5 от данного несущего элемента 13 и начинается ее падение.
При этом выполняются соотношения

Коэффициенты усиления первого малошумящего усилителя 26, вторых малошумящих усилителей 42 и третьих малошумящих усилителей 64 заданы так, чтобы чувствительности первой радиоприемной станции 4, промежуточных приемопередающих станций 5 и вторых радиоприемных станций 61 равнялись Pпр. мин.
Коэффициенты усиления первого усилителя 22 мощности и вторых усилителей 55 мощности заданы так, чтобы мощности радиосигналов, передаваемых с неподвижного объекта 1 и с промежуточных приемопередающих станций 5, равнялись Ризл.
Тогда с учетом выражений (12)-(21) дальности действия радиопередающей станции 3 и промежуточных приемопередающих станций 5 равны RQ min.
В блок 8 задания вводят значения дальностей RQ min действия промежуточных приемопередающих станций 5.
Блок 6 управления считывает код с выходов блока 8 задания, содержащий информацию о заданных значениях дальностей RQ min действия, и определяет по формулам (22), (23) величины db min и Δ dn.
Примем, что частота передачи n-й промежуточной приемопередающей станции 5 равна

где Δ f - смещение по частоте.
Блок 6 управления вырабатывает управляющие сигналы, по которым частота колебаний, формируемых управляемым генератором 28, принимает значение f’bq|q=1+fb п, причем в соответствии с формулами (29), (30)


где fb n - промежуточная частота первой радиоприемной станции 4.
Контакты геркона 58 каждой из промежуточных приемопередающих станций 5, размещенных в несущих элементах 13, замкнуты в результате воздействия магнитного поля соответствующего магнита 16. К выводам обмотки электромагнитного реле 57 приложено напряжение аккумулятора 59. Контакты электромагнитного реле 57 разомкнуты. Приемопередающий блок 38 обесточен. Промежуточная приемопередающая станция 5 не функционирует.
В момент времени t
При этом блок 6 управления непрерывно считывает с выходов измерителя 7 скорости информацию о скорости движения первого подвижного объекта 2 и с помощью формул (24), (25) определяет моменты времени сброса промежуточных приемопередающих станций 5.
Примем, что время разгона первого подвижного объекта 2 до скорости Vb с началом горизонтального движения пренебрежимо мало.
Если временем разгона пренебречь нельзя, то момент времени tb min сброса первых промежуточных станций 5 определяют из решения уравнения

В момент времени  завершения подъема первого подвижного объекта 2 на высоту hb max, блок 6 управления формирует управляющий сигнал, по которому электропривод 10 приводит ленту 12 конвейера 11 в движение со скоростью
завершения подъема первого подвижного объекта 2 на высоту hb max, блок 6 управления формирует управляющий сигнал, по которому электропривод 10 приводит ленту 12 конвейера 11 в движение со скоростью

Движение ленты 12 над продольной осью симметрии конвейера 11 происходит по направлению к отверстию 18 (фиг.3).
Время, за которое скорость движения ленты 12 достигнет значения Ub, пренебрежимо мало.
До момента времени hb min первого удаления первого подвижного объекта 2 от неподвижного объекта 1 на расстояние hb min c первого подвижного объекта 2 сброс промежуточных приемопередающих станций 5 не осуществляют (случай 26, а).
В этом случае передача радиосигналов с неподвижного объекта 1 на первый подвижный объект 2 состоит в следующем.
Двоичная последовательность импульсов с выхода источника 19 сообщений радиопередающей станции 3, размещенной на неподвижном объекте 1, поступает на первый вход первого преобразователя 20 частоты. На второй его вход поступают колебания частоты fa, вырабатываемые первым гетеродином 21. Значение частоты fa задают по формуле (33).
Амплитудно-манипулированный сигнал с выхода первого преобразователя 20 частоты поступает на вход первого усилителя 22 мощности, сигнал с выхода которого поступает на вход первой передающей антенны 23. Первая передающая антенна 23 передает на заданной рабочей частоте fa соответствующий радиосигнал.
Первая приемная антенна 24 первой радиоприемной станции 4, размещенной на первом подвижном объекте 2, принимает радиосигнал, переданный радиопередающей станцией 3. Сигнал с выхода первой приемной антенны 24 поступает на вход первого полосового фильтра 25, обеспечивающего избирательность по зеркальному каналу (см., например, Радиоприемные устройства. Под ред. В.И.Сифорова. - М.: Советское радио, 1974, с.235). Сигнал с выхода первого полосового фильтра 25 поступает на вход первого малошумящего усилителя 26, сигнал с выхода которого поступает на первый вход второго преобразователя 27 частоты. На второй его вход поступают колебания частоты f’bq|q=1+fb п вырабатываемые управляемым генератором 28. Значения рабочих частот f’b1,f’b2,…,f’bQ принимаемых радиосигналов определены формулой (34). Сигнал промежуточной частоты fb n с выхода второго преобразователя 27 частоты поступает на вход первого усилителя 29 промежуточной частоты, сигнал с выхода которого поступает на входы всех вторых полосовых фильтров 31. (Спектр сигнала, действующего на выходе второго преобразователя 27 частоты, содержит составляющие, соответствующие рабочим частотам принимаемых радиосигналов. При этом спектр данного сигнала вследствие малости Δ f является узкополосным и сосредоточенным около промежуточной частоты fb n). На основании формул (32), (33) частота настройки второго полосового фильтра 31 q –го первого канала 30 обработки равна f
Спустя некоторое время после начала движения по маршруту первого подвижного объекта 2 из начального пункта О начинают движение вторые подвижные объекты 60, маршруты движения которых совпадают с маршрутом движения первого подвижного объекта 2.
Вторые подвижные объекты 60 могут совершать движение по маршруту в произвольном порядке, например обгоняя друг друга, однако обгонять первый подвижный объект 2 они не должны.
Максимальное количество вторых подвижных объектов 60 ограничено и связано с максимальной продолжительностью работы сброшенных промежуточных приемопередающих станций 5.
Если с первого подвижного объекта 2 еще не сброшено ни одной промежуточной приемопередающей станции 5 (случай 26, а), то передача радиосигналов с неподвижного объекта 1 на вторые подвижные объекты 60 состоит в следующем.
Третья приемная антенна 62 второй радиоприемной станции 61, размещенной на каждой из вторых подвижных объектов 60, принимает радиосигнал, переданный радиопередающей станцией 3. Сигнал с выхода третьей приемной антенны 62 поступает на вход пятого полосового фильтра 63, обеспечивающего избирательность по зеркальному каналу (см., например, Радиоприемные устройства. Под ред. В.И.Сифорова. - М.: Советское радио, 1974, с.235). Сигнал с выхода пятого полосового фильтра 63 поступает на вход третьего малошумящего усилителя 64, сигнал с выхода которого поступает на первый вход пятого преобразователя 65 частоты. На второй его вход поступают колебания частоты fn|n=1+fc п, вырабатываемые четвертым гетеродином 66. Сигнал промежуточной частоты fc n с выхода пятого преобразователя 65 частоты поступает на вход третьего усилителя 67 промежуточной частоты, сигнал с выхода которого поступает на входы всех шестых полосовых фильтров 69. На основании формулы (32) частота настройки шестого полосового фильтра 69 n-то третьего канала 68 обработки равна f
Значения промежуточных частот первой радиоприемной станции 4, вторых радиоприемных станций 61 и промежуточных приемопередающих станций 5 задают с учетом известных ограничений (см., например, Радиоприемные устройства. Под ред. В.И.Сифорова. - М.: Советское радио, 1974, с.240).
Значения рабочих частот f’b1,f’b2,…,f’bQ, определяемые формулой (34), остаются неизменными в течение интервала времени сброса с первого подвижного объекта 2 первой группы промежуточных приемопередающих станций 5.
В момент времени tb=tb min, в результате движения ленты 12 конвейера 11 ближайший к отверстию 18 несущий элемент 13 занимает положение, при котором происходит отрыв соответствующей промежуточной приемопередающей станции 5 от данного несущего элемента 13 и начинается ее падение. В этом состоит сброс первой промежуточной приемопередающей станции 5 с первого подвижного объекта 2. (До сброса с первого подвижного объекта 2 следующей промежуточной приемопередающей станции 5 данная промежуточная приемопередающая станция 5 является одновременно последней сброшенной с первого подвижного объекта 2 промежуточной приемопередающей станцией 5).
При этом контакты геркона 58 данной промежуточной приемопередающей станции 5 размыкаются. Контакты электромагнитного реле 57 принимают нормально замкнутое состояние. На приемопередающий блок 38 поступает напряжение питания. Происходит включение промежуточной приемопередающей станции 5.
Одновременно блок 6 управления вырабатывает управляющий сигнал, по которому частота колебаний, формируемых управляемым генератором 28, принимает в соответствии с формулой (30) значение f’bq|q=1+fb п, при котором рабочие частоты радиосигналов, принимаемых на первом подвижном объекте 2, равны f’bq=fn|n=(jmax-1)Q+q.
Спустя некоторый интервал времени, определяемый, в частности, массой промежуточной приемопередающей станции 5 и аэродинамическими характеристиками ее конструкции, раскрывается парашют 15, прикрепленный к данной промежуточной приемопередающей станции 5 стропами 14, что вызывает уменьшение скорости ее падения.
Радиопередающая станция 3 передает на заданной рабочей частоте fa радиосигнал. При этом работа блоков радиопередающей станции 3 протекает аналогично описанному выше.
Вторая приемная антенна 40 первой (одновременно являющейся последней) сброшенной с первого подвижного объекта 2 промежуточной приемопередающей станции 5 принимает радиосигнал, переданный радиопередающей станцией 3. Сигнал с выхода второй приемной антенны 40 поступает на вход третьего полосового фильтра 41, обеспечивающего избирательность по зеркальному каналу. Сигнал с выхода третьего полосового фильтра 41 поступает на вход второго малошумящего усилителя 42, сигнал с выхода которого поступает на первый вход третьего преобразователя 43 частоты. На второй его вход поступают колебания частоты  вырабатываемые вторым гетеродином 44. Сигнал промежуточной частоты fn n с выхода третьего преобразователя 43 частоты поступает на вход второго усилителя 45 промежуточной частоты, сигнал с выхода которого поступает на входы четвертых полосовых фильтров 47. На основании формул (32), (33) частота настройки четвертого полосового фильтра 47 q-го второго канала 46 обработки n-й промежуточной приемопередающей станции 5 равна f
вырабатываемые вторым гетеродином 44. Сигнал промежуточной частоты fn n с выхода третьего преобразователя 43 частоты поступает на вход второго усилителя 45 промежуточной частоты, сигнал с выхода которого поступает на входы четвертых полосовых фильтров 47. На основании формул (32), (33) частота настройки четвертого полосового фильтра 47 q-го второго канала 46 обработки n-й промежуточной приемопередающей станции 5 равна f
Первая радиоприемная станция 4 принимает радиосигналы, переданные с последней (одновременно являющейся первой) сброшенной с первого подвижного объекта 2 промежуточной приемопередающей станции 5. При этом работа блоков первой радиоприемной станции 4 протекает аналогично описанному выше, причем значение частоты колебаний, вырабатываемых управляемым генератором 28, равно f’b q|q=1+fb п; значение рабочей частоты f'b радиосигналов, принимаемых на первом подвижном объекте 2, задают по формуле (34).
С момента времени tb min первого удаления первого подвижного объекта 2 от неподвижного объекта 1 на расстояние db min. B результате равномерного движения ленты 12 конвейера 11 со скоростью Ub с первого подвижного объекта 2 происходит сброс промежуточных приемопередающих станций 5 с интервалом по дальности, равным, как следует из формулы (36), Δ dn.
При этом в момент времени tn сброса очередной n-й промежуточной приемопередающей станции 5 блок 6 управления вырабатывает управляющий сигнал, по которому частота колебаний, формируемых управляемым генератором 28, принимает значение в соответствии с формулой (30).
Спустя некоторый интервал времени, определяемый, в частности, массой n-й промежуточной приемопередающей станции 5 и аэродинамическими характеристиками ее конструкции, раскрывается парашют 15, прикрепленный к данной промежуточной приемопередающей станции 5 стропами 14, что вызывает уменьшение скорости ее падения.
Включение сброшенных промежуточных приемопередающих станций 5 в результате размыкания контактов герконов 58 происходит аналогично описанному выше.
Рассмотрим передачу радиосигналов с неподвижного объекта 1 на первый подвижный объект 2 в случае, когда с первого подвижного объекта 2 сброшено jmax групп (2<jmax≤J) промежуточных приемопередающих станций 5, общее количество которых равно nmax (2Q<nmax≤N).
Радиопередающая станция 3 передает на заданной рабочей частоте fa радиосигнал. При этом работа блоков радиопередающей станции 3 протекает аналогично описанному выше.
Принимают переданные с неподвижного объекта 1 радиосигналы на каждой из группы первых (n=1,2,...,Q) сброшенных с первого подвижного объекта 2 промежуточных приемопередающих станций 5 и передают их. При этом работа блоков промежуточных приемопередающих станций 5 данной группы (j=1) протекает аналогично описанному выше, причем частоты колебаний, вырабатываемых вторыми гетеродинами 44, равны  частоты колебаний, вырабатываемых третьими гетеродинами 54, равны fn|n=1,2,…,Q; заданная рабочая частота радиосигналов, принимаемых на промежуточных приемопередающих станциях 5 данной (j=1) группы и передаваемых с них, равна соответственно
частоты колебаний, вырабатываемых третьими гетеродинами 54, равны fn|n=1,2,…,Q; заданная рабочая частота радиосигналов, принимаемых на промежуточных приемопередающих станциях 5 данной (j=1) группы и передаваемых с них, равна соответственно  .
.
Принимают переданные с каждой из группы первых (n=1,2,...,Q) сброшенных с первого подвижного объекта 2 промежуточных приемопередающих станций 5 радиосигналы на каждой из группы других (n=0+1, Q +2,...,2 Q) промежуточных приемопередающих станций 5, сброшенных с первого подвижного объекта 2 в течение интервала времени tn|n=Q+1<tb≤tn|n=2Q следующего за интервалом времени tn|n=1<tb≤tn|n=Q сброса с первого подвижного объекта 2 группы первых (n==1,2,...,Q) промежуточных приемопередающих станций 5, и передают их. При этом работа блоков промежуточных приемопередающих станций 5 данной группы (j=2) протекает аналогично описанному выше, причем частоты колебаний, вырабатываемых вторыми гетеродинами 44, равны  частоты колебаний, вырабатываемых третьими гетеродинами 54, равны
частоты колебаний, вырабатываемых третьими гетеродинами 54, равны  заданные рабочие частоты радиосигналов, принимаемых на промежуточных приемопередающих станциях 5 данной (j=2) группы и передаваемых с них, равны соответственно
заданные рабочие частоты радиосигналов, принимаемых на промежуточных приемопередающих станциях 5 данной (j=2) группы и передаваемых с них, равны соответственно  и
и 
Аналогичным образом осуществляют прием и передачу радиосигналов с помощью других (j=3,4,...,jmах) групп сброшенных с первого подвижного объекта 2 промежуточных приемопередающих станций 5 по направлению передачи радиосигналов от сброшенных промежуточных приемопередающих станций 5 в течение более ранних интервалов времени tn|n=(j-1)Q+1<tb≤tn|n=jQ к сброшенным в течение более поздних интервалов времени tn|n=jQ+1<tb≤tn|n=(j+1)Q. При этом работа блоков промежуточных приемопередающих станций 5 j-й группы (n=1) протекает аналогично описанному выше, причем частоты колебаний, вырабатываемых вторыми гетеродинами 44, равны  ; частоты колебаний, вырабатываемых третьими гетеродинами 54, равны
; частоты колебаний, вырабатываемых третьими гетеродинами 54, равны  ; заданные рабочие частоты радиосигналов, принимаемых на промежуточных приемопередающих станциях 5 данной (j-й) группы и передаваемых с них, равны соответственно
; заданные рабочие частоты радиосигналов, принимаемых на промежуточных приемопередающих станциях 5 данной (j-й) группы и передаваемых с них, равны соответственно
 и
и 
Первая радиоприемная станция 4 принимает радиосигналы, переданные с каждой из группы последних (n=(jmax-1)Q+1,(jmax-1)Q+2,…,nmax) сброшенных с первого подвижного объекта 2 промежуточных приемопередающих станций 5. При этом работа блоков первой радиоприемной станции 4 протекает аналогично описанному выше, причем значение частоты колебаний, вырабатываемых управляемым генератором 28, равно f’bq|q=1+fbп значения рабочих частот радиосигналов, принимаемых на первом подвижном объекте 2, равны 
При сбросе с первого подвижного объекта 2 первой промежуточной приемопередающей станции 5 j-й группы блок 6 управления вырабатывает управляющий сигнал, по которому частота колебаний, формируемых управляемым генератором 28, принимает в соответствии с формулой (30) новое значение f’bq|q=1+fbп которое сохраняется до сброса первой промежуточной приемопередающей станции 5 (j+1)-й группы; рабочие частоты радиосигналов, принимаемых на первом подвижном объекте 2, принимают значения, равные f’bq=fn|n=(jmax-1)Q+q.
Если с первого подвижного объекта 2 сброшена хотя бы одна промежуточная приемопередающая станция 5 (случай 26, б), то передача радиосигналов с неподвижного объекта 1 на вторые подвижные объекты 60 состоит в следующем.
Третья приемная антенна 62 второй радиоприемной станции 61, размещенной на каждой из вторых подвижных объектов 60, принимает радиосигнал, переданный радиопередающей станцией 3. Сигнал с выхода третьей приемной антенны 62 поступает на вход пятого полосового фильтра 63, обеспечивающего избирательность по зеркальному каналу. Сигнал с выхода пятого полосового фильтра 63 поступает на вход третьего малошумящего усилителя 64, сигнал с выхода которого поступает на первый вход пятого преобразователя 65 частоты. На второй его вход поступают колебания частоты fn|n=1+fc п, вырабатываемые четвертым гетеродином 66. Сигнал промежуточной частоты fc n с выхода пятого преобразователя 65 частоты поступает на вход третьего усилителя 67 промежуточной частоты, сигнал с выхода которого поступает на входы всех шестых полосовых фильтров 69. Сигналы с выходов шестых полосовых фильтров 69 поступают на соответствующие коммутируемые входы третьего аналогового коммутатора 72 и на входы соответствующих третьих измерителей 70 мощности. В каждом третьем канале 68 обработки сигнал с выхода третьего измерителя 70 мощности поступает на вход третьего аналого-цифрового преобразователя 71, который вырабатывает двоичный код, соответствующий значению мощности радиосигнала, принимаемого на соответствующей заданной рабочей частоте. Третий микроконтроллер 73 считывает двоичные коды с выходов всех третьих аналого-цифровых преобразователей 71 и определяет по ним заданную рабочую частоту принимаемого радиосигнала максимальной мощности. Затем третий микроконтроллер 73 формирует на управляющих входах третьего аналогового коммутатора 72 управляющие сигналы, по которым третий аналоговый коммутатор 72 подключает выход шестого полосового фильтра 69, соответствующего заданной рабочей частоте принимаемого радиосигнала максимальной мощности, к входу третьего демодулятора 74. Двоичная последовательность импульсов, соответствующая передаваемому сообщению, поступает с выхода третьего демодулятора 74 на вход второго получателя 75 сообщений.
Дальности действия радиопередающей станции 3 и промежуточных приемопередающих станций 5 теоретически могут иметь очень малые заданные значения. В связи с этим даже при больших расстояниях между неподвижным объектом 1 и первым подвижным объектом 2 объем геометрического пространства, занимаемого системой радиосвязи, может быть незначительным.
В качестве примера ниже приведены значения параметров, удовлетворяющие применяемым в описании формулам.
N=10;Q=2; J=5;
δ ≤ 0.1 м; k1=k2=1;
Rm in=250 м; hmin=0.1 м; hmax=200 м; Pпр.min=10-13 Вт; Ризл=4 Вт;
db min=Δ dn=Rmin=250 м;
lb min=Δ ln=0.25 м;
Vb=2 м/с; Ub=0.0034 м/с;
вид модуляции - амплитудная манипуляция;
скорость передачи информации 512 бит/с;

 =100.2 МГц;
=100.2 МГц;
fb n=fсп=fnп=10.0 МГц при всех n;
Δ f=0.2 МГц;
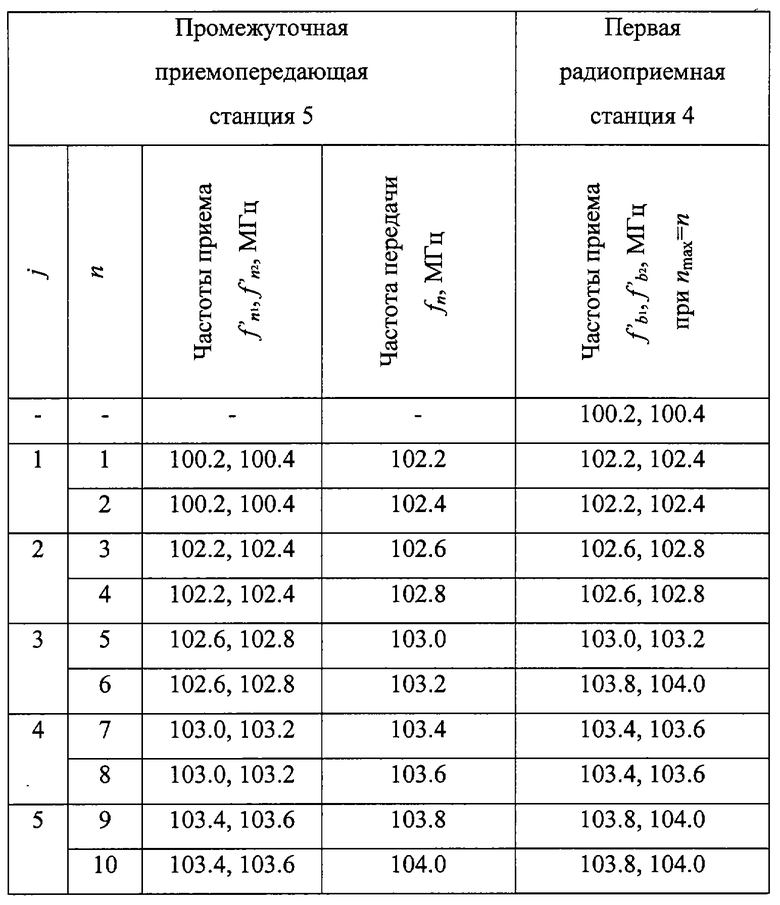
значения частот f'b приема первой радиоприемной станции 4 при сбросе очередных nmax промежуточных приемопередающих станций 5 с первого подвижного объекта 2, а также значения частот fn и f’n передачи и приема промежуточных приемопередающих станций 5 сведены в таблицу.
Таким образом, осуществление радиосвязи между подвижными объектами и неподвижным объектом, находящимся в начальном пункте общего маршрута движения подвижных объектов, с помощью сбрасываемых с первого подвижного объекта маломощных промежуточных приемопередающих станций, оснащенных ненаправленными антеннами, позволяет улучшить массогабаритные показатели приемопередающих станций неподвижного и подвижных объектов, увеличить помехоустойчивость различных радиоэлектронных средств, размещенных на неподвижном и подвижных объектах, повысить электромагнитную безопасность людей, находящихся на неподвижном и подвижных объектах, сократить объем геометрического пространства, занимаемого данной системой радиосвязи, а следовательно, повысить эффективность способа в условиях одновременной эксплуатации нескольких систем радиосвязи.




Изобретение относится к радиосвязи, а именно к способам передачи информации на подвижные объекты с неподвижного объекта, находящегося в начальном пункте общего маршрута движения подвижных объектов. Достигаемым техническим результатом является улучшение массогабаритных показателей приемопередающих станций подвижных и неподвижного объектов, увеличение помехоустойчивости различных радиоэлектронных средств, размещенных на неподвижном и подвижных объектах, повышение электромагнитной безопасности людей, находящихся на неподвижном и подвижных объектах, сокращение объема геометрического пространства, занимаемого данной системой радиосвязи, а следовательно, повышение эффективности способа в условиях одновременной эксплуатации нескольких систем радиосвязи на основе осуществления радиосвязи с помощью сбрасываемых с первого подвижного объекта маломощных промежуточных приемопередающих станций, оснащенных ненаправленными антеннами. Для этого осуществляют радиосвязь с помощью сбрасываемых с первого подвижного объекта маломощных промежуточных приемопередающих станций, оснащенных ненаправленными антеннами, причем сбрасываемые промежуточные приемопередающие станции предварительно создают на первом подвижном объекте. 1 з.п.ф-лы, 7 ил., 1 табл.
| WO 9641429 А1, 19.12.1996 | |||
| Пирумов В.С., Червинский Р.А | |||
| Радиоэлектроника в войне на море | |||
| - М.: Воениздат, 1987, с.113-125, рис | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |

