Группа изобретений относится к оружейной технике, в частности к прицелам и устройствам прицеливания с применением электронных средств для распознавания, представления и воспроизведения данных, и может быть использована в стрелковом оружии для автоматической селекции цели, автоматизированного прицеливания и выстрела.
Известен лазерный излучатель, крепящийся к ложу ручного огнестрельного оружия, содержащий корпус, генератор лазерного луча, оптическую систему, светодиод и датчик. Устройство предназначено для наводки стрелкового оружия на цель и используется для тренировки солдат в составе системы имитации тактической обстановки [1]. Его недостатком является излишняя громоздкость, не позволяющая использовать в реальной обстановке.
Известно устройство для определения положения линии стрельбы, содержащее две телекамеры с объективами и оптическими метками (реперами), блок визуализации и вычислитель. Одна телекамера установлена на оружии так, что объектив направлен в сторону стрелка. Блок визуализации и вторая телекамера закреплены на каске стрелка, при этом объектив телекамеры направлен в сторону цели. Вычислитель на основе цифровой информации, поступающей с каждой телекамеры, управляет блоком визуализации для формирования в нем трех символов, материализующих в реальном масштабе времени направление стрельбы оружия, при этом центры всех трех символов находятся на одной прямой. Особенностью устройства является то, что в положении выстрела метки каски находятся в поле зрения телекамеры, установленной на оружии, а метки оружия - в поле зрения телекамеры, установленной на каске [2]. Достоинством данного устройства является визуализация сцены, простой способ формирования линии выстрела ручным совмещением трех символов на одной прямой. К недостаткам устройства следует отнести громоздкость (наличие двух телекамер), обязательное нахождение меток в поле зрения телекамер в положении выстрела, что накладывает ограничения на положение стрелка относительно оружия, ручное исполнение выстрела нажатием спускового крючка, что снижает точность стрельбы.
Известен также видеоприцел со встроенным управлением огнем для винтовок, содержащий видеокамеру с объективом, блок ввода данных, вычислительный блок управления огнем, смеситель видеосигналов, генератор перекрестия, видеомонитор. Выход телекамеры соединен с первым входом смесителя видеосигналов, вход вычислительного блока управления огнем подключен к выходу блока ввода данных, а выход - к генератору перекрестия, выход которого соединен со вторым входом смесителя видеосигналов. Изображение на экране монитора стрелок наблюдает в окуляр. Характерной особенностью описанного устройства является наличие вычислительного блока управления огнем. Для повышения точности стрельбы в этом блоке вычисляются угол упреждения (по курсу) и угол возвышения (по высоте) с учетом значений параметров, получаемых с выхода блока ввода данных (дальность, скорость угла прицеливания, скорость поперечного ветра, температура и давление воздуха, перекос оружия, баллистические данные боеприпасов). В результате генерируемое перекрестие смещается относительно центра экрана видеомонитора на значения углов упреждения и возвышения [3]. Причиной, препятствующей достижению указанного ниже технического результата при использовании известного устройства, является недостаточная точность прицеливания и выстрела, обусловленная ручным исполнением выстрела нажатием спускового крючка, выполняемым стрелком с присущим человеку запаздыванием, и отсутствием зоны разрешения выстрела относительно точки прицеливания. Кроме того, в процессе прицеливания и стрельбы стрелок наблюдает текущее видеоизображение в окуляр видеоприцела, закрепленного на оружии, что накладывает ограничения на положение стрелка относительно оружия.
Наиболее близким по назначению и технической сущности к заявленным изобретениям является вспомогательное оптронное устройство для стрелкового оружия пехотинца, содержащее оптико-электронный датчик с широким полем зрения, оптико-электронный датчик с узким полем зрения, коммутатор видеосигналов, устройство визуализации, блок управления, блок захвата, блок разрешения выстрела, спусковое устройство, блок питания. Оптико-электронный датчик с широким полем зрения и монитор устройства визуализации закреплены на каске пехотинца, оптико-электронный датчик с узким полем зрения - на стрелковом оружии. Выходы оптико-электронных датчиков соединены с входами коммутатора видеосигналов, к выходу которого подключено устройство визуализации. Оптико-электронный датчик с узким полем зрения также связан с блоком захвата, который в свою очередь связан с блоком разрешения выстрела, содержащим устройство измерения отклонения линии прицеливания, к выходам которого подключены блок памяти эталонных значений ошибок прицеливания и компаратор. Блок управления связан с коммутатором видеосигналов, блоком захвата и компаратором блока разрешения выстрела, к выходу которого подключено спусковое устройство. Последнее срабатывает по команде блока разрешения выстрела, когда координаты цели, вычисленные устройством измерения отклонения линии прицеливания, равны эталонным значениям, хранящимся в блоке памяти [4].
Действие известного устройства основано на использовании широкого и узкого полей обзора для засечки и распознавания цели в сочетании с автоматическим устройством сопровождения цели и обычным спусковым механизмом. Устройство обеспечивает захват и автосопровождение цели на сложных фонах.
Причиной, препятствующей достижению указанного ниже технического результата при использовании известного устройства, является недостаточная эффективность стрельбы, обусловленная тем, что при вычислениях координат цели и производстве выстрела не учитываются расстояния до цели, положение стрелкового оружия, влияние окружающей среды (поперечный ветер, температура воздуха, атмосферное давление), что снижает точность прицеливания и вероятность поражения цели, особенно на больших дальностях до нее.
Задачей заявленной группы изобретений является разработка и создание средства прицеливания и производства выстрела из стрелкового оружия, позволяющего автоматизировать процессы селекции цели, формирования точки прицеливания и выстрел, что снижает ограничения на положение стрелка по отношению к оружию и сводит к минимуму время запаздывания, свойственное человеку, по сравнению с производством выстрела путем нажатия пальцем на спусковой крючок. Технический результат, достигаемый при осуществлении изобретений, выражается в повышении точности и быстродействия прицеливания и выстрела, дальности эффективной стрельбы.
Указанный технический результат достигается тем, что известное устройство, содержащее оптико-электронный датчик, блок захвата, блок разрешения выстрела, блок визуализации и блок питания, согласно изобретению снабжено блоком кадровой памяти, блоком управления рамкой, морфологическим классификатором, лазерным дальномером, содержащим лазерный излучатель, первый и второй приемники лазерного излучения, датчиком крена оружия, аналого-цифровым преобразователем, выполненным с возможностью преобразования напряжения сигналов, поступающих на его входы, в последовательный код (АЦПК), датчиком температуры воздуха, датчиком атмосферного давления, первым и вторым приемопередатчиками информации, многоканальным аналого-цифровым преобразователем, блоком предварительной обработки изображения сцены, блоком стабилизации кадра, классификатором движения цели, блоком анализа, блоком проверки дальности, формирователем точки прицеливания, первым и вторым цифроаналоговыми преобразователями, блоком оценки поперечной скорости ветра, переключателем, первым электронным ключом, электромагнитом с якорем, блоком разрешения измерения дальности, при этом оптико-электронный датчик, датчик крена оружия, лазерный дальномер, АЦПК, передатчик первого приемопередатчика информации, приемник второго приемопередатчика информации, первый электронный ключ, блок питания и электромагнит с якорем размещены на стрелковом оружии, причем выходы датчика крена оружия, первого и второго приемников лазерного излучения дальномера подключены к входам АЦПК, выход которого и выход оптико-электронного датчика соединены с входами передатчика первого приемопередатчика информации, первый выход приемника второго приемопередатчика информации соединен с управляющим входом излучателя лазерного дальномера, ко второму выходу приемника второго приемопередатчика информации последовательно подключены первый электронный ключ и электромагнит, якорь которого механически связан со спусковым крючком стрелкового оружия, а второй вход первого электронного ключа соединен с блоком питания; остальные блоки устройства размещены в экипировке стрелка, при этом приемник первого приемопередатчика информации, аналого-цифровой преобразователь, блок кадровой памяти, блок предварительной обработки изображения сцены, блок стабилизации кадра, морфологический классификатор, блок анализа, блок проверки дальности, формирователь точки прицеливания, первый цифроаналоговый преобразователь и блок визуализации включены последовательно; к другим входам аналого-цифрового преобразователя подключены выходы датчика температуры воздуха и датчика атмосферного давления; второй и третий выходы приемника первого приемопередатчика информации подключены ко второму и третьему входам блока кадровой памяти, а четвертый и пятый выходы - к первому и второму входам блока оценки поперечной скорости ветра, выход которого соединен с четвертым входом блока кадровой памяти, к пятому и шестому входам которого подключены соответственно второй выход блока стабилизации кадра и выход блока управления рамкой, вход которого соединен с выходом блока анализа; первый выход блока стабилизации кадра соединен также с входом блока захвата, входом классификатора движения цели и входом второго цифроаналогового преобразователя, выход которого через нормально замкнутые контакты переключателя соединен со вторым входом блока визуализации, который через нормально разомкнутые контакты переключателя связан с выходом приемника первого приемопередатчика информации; выход блока захвата подключен ко второму входу морфологического классификатора; первый и второй выходы классификатора движения цели подсоединены соответственно ко второму и третьему входам блока анализа, к выходу которого также подключен вход блока разрешения измерения дальности, выход которого соединен со вторым входом передатчика второго приемопередатчика информации, первый вход которого соединен с выходом блока разрешения выстрела, вход которого подключен ко второму выходу формирователя точки прицеливания.
В качестве оптико-электронного датчика использована телевизионная или тепловизионная камера.
Блок предварительной обработки изображения сцены содержит последовательно соединенные медианный фильтр по строкам с размерами окна 1×3 пикс. и медианный фильтр по столбцам с размерами окна 3×1 пикс.
Блок стабилизации кадра содержит первое устройство хранения опорного изображения сцены - первого кадра и устройство хранения последующих изображений сцены - текущих кадров, входы которых объединены и являются входом блока, выход первого устройства хранения опорного изображения сцены - первого кадра и первый выход устройства хранения последующих изображений сцены - текущих кадров соединены соответственно с первым и вторым входами устройства привязки изображения, выход которого является вторым выходом блока, а второй выход устройства хранения последующих изображений сцены (текущих кадров) - первым выходом блока.
Морфологический классификатор содержит устройство идентификации границ областей фона, устройство оценки координат цели, первое устройство принятия решения, последовательно включенные устройство структуризации множества яркостей точек изображения, устройство выделения “пиков” и “долин”, устройство выделения цели, устройство оценки качества селекции цели, устройство уточнения параметров цели, при этом первый вход устройства структуризации множества яркостей точек изображения, являясь первым входом морфологического классификатора, соединен с входом устройства идентификации границ областей фона, выход которого соединен со вторым входом устройства выделения цели, к выходу которого также подключен вход устройства оценки координат цели, выход которого соединен со вторым входом первого устройства принятия решения, первый вход которого подключен к выходу устройства оценки качества селекции цели, выход устройства уточнения параметров цели соединен со вторым входом устройства структуризации множества яркостей точек изображения, являющимся вторым входом морфологического классификатора, а выход первого устройства принятия решения - его выходом.
Первое устройство принятия решения содержит первый сумматор-ограничитель, второй и третий электронные ключи, первое и второе запоминающие устройства, при этом первый вход первого сумматора-ограничителя соединен с выходом устройства оценки качества селекции цели, второй вход - с источником постоянного сигнала отрицательной полярности, величина которого пропорциональна допустимому значению показателя качества селекции цели, а выход - со вторыми входами соответственно первого и второго электронных ключей, первые входы которых соединены с выходом устройства оценки координат цели, а выходы - со входами соответственно первого и второго запоминающих устройств, выходы которых, являясь выходами морфологического классификатора, подключены к блоку анализа.
Блок анализа содержит первую схему НЕ, четвертый, пятый и шестой электронные ключи, первый сумматор и первую схему ИЛИ, при этом первые входы четвертого и пятого электронных ключей объединены и являются первым входом блока, первый вход шестого электронного ключа - вторым входом, а объединенные вход первой схемы НЕ и вторые входы пятого и шестого электронных ключей - третьим входом блока, выход первой схемы НЕ соединен со вторым входом третьего электронного ключа, выход которого соединен с первым входом первой схемы ИЛИ, выходы пятого и шестого электронных ключей соединены соответственно с первым и вторым входами первого сумматора, выход которого соединен со вторым входом первой схемы ИЛИ, выход которой является выходом блока.
Блок проверки дальности содержит второй сумматор-ограничитель, выход которого соединен со вторыми входами соответственно седьмого и восьмого электронных ключей, при этом первые входы этих ключей являются первым входом блока, вторым его входом является первый вход второго сумматора-ограничителя, ко второму входу которого подключен источник постоянного сигнала отрицательной полярности, величина которого пропорциональна значениям минимальной измеряемой дальности, а выходы седьмого и восьмого электронных ключей являются выходами блока.
Блок оценки поперечной скорости ветра содержит последовательно соединенные коррелятор и вычислитель поперечной скорости ветра.
Классификатор движения цели содержит устройство хранения текущего изображения, второе устройство хранения опорного изображения, вычислитель разностного изображения, устройство сегментации разностного изображения, устройство оценки координат и первое устройство оценки скорости цели, при этом входы устройств хранения текущего изображения и опорного изображения объединены и являются входом классификатора, а их выходы соединены соответственно с первым и вторым входами вычислителя разностного изображения, к выходу которого подключены последовательно соединенные устройство сегментации, устройство оценки координат и первое устройство оценки скорости цели, причем выход устройства оценки координат является также первым выходом, а выход первого устройства оценки скорости цели - вторым выходом классификатора.
Блок захвата содержит последовательно соединенные устройство кластерного анализа, устройство сегментации изображения цели и устройство формирования значений горизонтального и вертикального размеров изображения цели, знака контраста цели.
Формирователь точки прицеливания содержит последовательно соединенные устройство оценки координат цели с учетом крена оружия, второе устройство оценки скорости цели, устройство формирования координат цели с учетом баллистических поправок, устройство формирования точки прицеливания, первый и второй выходы которого являются выходами формирователя точки прицеливания и подключены соответственно к входу первого цифроаналогового преобразователя и входу блока разрешения выстрела.
Блок разрешения измерения дальности содержит первый и второй измерители модулей входных квадратурных сигналов, соответственно синусного - х и косинусного - у, выходы которых подключены соответственно к первым входам третьего и четвертого сумматоров-ограничителей, вторые входы которых подключены к источнику постоянных сигналов отрицательной полярности, величина которых пропорциональна допустимым отклонениям оси лазерного луча излучателя лазерного дальномера от линии визирования цели, а выходы - соответственно к первому и второму входам первой схемы И, при этом входами блока являются входы первого и второго измерителей модулей входных квадратурных сигналов, которые подключены к выходу блока анализа, а выходом - выход первой схемы И, соединенный с первым входом передатчика второго приемопередатчика информации.
Блок разрешения выстрела содержит третий и четвертый измерители модулей входных квадратурных сигналов, соответственно синусного - х и косинусного - у, выходы которых подключены соответственно к первым входам пятого и шестого сумматоров-ограничителей, вторые входы которых подключены к источнику постоянных сигналов отрицательной полярности, величина которых пропорциональна зоне разрешения выстрела, выходы пятого и шестого сумматоров-ограничителей подключены соответственно к первому и второму входам второй схемы И, при этом входами блока являются входы третьего и четвертого измерителей модулей входных квадратурных сигналов, которые подключены к выходу формирователя точки прицеливания, а выходами - выходы второй схемы И, первый из которых соединен со вторым входом передатчика второго приемопередатчика, а второй выполнен с возможностью подключения ко второму входу первого электронного ключа с помощью кабеля.
Блок визуализации содержит размещенные в шлеме стрелка модуль монитора и герметичный оптический модуль, состоящий из входного и выходного окон, мониторного окна и оптического корректора, в нижней части герметичного оптического модуля напротив мониторного окна установлено зеркало так, чтобы изображение с монитора легко и удобно попадало в глаз стрелка через оптический корректор, при этом герметичный оптический модуль укреплен перед лицом стрелка так, чтобы он мог свободно обозревать через входное и выходное окна лежащую перед ним местность с возможностью бинокулярного наблюдения изображения на экране монитора, который укреплен внутри верхней лобной части шлема так, что плоскость экрана занимает примерно горизонтальное положение; в режиме автоматизированного прицеливания первый вход модуля монитора соединен с выходом первого цифроаналогового преобразователя, второй вход через нормально замкнутые контакты переключателя подключен к выходу второго цифроаналогового преобразователя, а через нормально разомкнутые контакты связан с выходом приемника первого приемопередатчика информации.
Указанный технический результат достигается тем, что известное устройство, содержащее оптико-электронный датчик, блок захвата, блок разрешения выстрела, блок визуализации, согласно изобретению снабжено блоком кадровой памяти, блоком управления рамкой, морфологическим классификатором, лазерным дальномером, содержащим лазерный излучатель и приемник лазерного излучения, датчиком крена оружия, аналого-цифровым преобразователем, выполненным с возможностью преобразования напряжения сигналов, поступающих на его входы, в последовательный код (АЦПК), датчиком температуры воздуха, датчиком атмосферного давления, первым и вторым приемопередатчиками информации, многоканальным аналого-цифровым преобразователем, блоком предварительной обработки изображения сцены, блоком стабилизации кадра, классификатором движения цели, блоком анализа, блоком проверки дальности, формирователем точки прицеливания, первым и вторым цифроаналоговыми преобразователями, блоком разрешения измерения дальности, переключателем, первым электронным ключом, электроинициатором, последовательно соединенными счетчиком выстрелов, седьмым электронным ключом, селектором трассирующей пули, блоком оценки промаха и вторым устройством принятия решения, при этом оптико-электронный датчик, датчик крена оружия, лазерный дальномер, АЦПК, передатчик первого приемопередатчика информации, приемник второго приемопередатчика информации и электроинициатор размещены на стрелковом оружии, причем выходы датчика крена оружия, приемника лазерного дальномера подключены к входам АЦПК, выход которого и выход оптико-электронного датчика соединены с входами передатчика первого приемопередатчика информации, первый выход приемника второго приемопередатчика информации соединен с управляющим входом излучателя лазерного дальномера, ко второму выходу приемника второго приемопередатчика информации подключен электроинициатор, выход которого выполнен с возможностью электрического контакта с капсюлем патрона; остальные блоки устройства размещены в экипировке стрелка, при этом приемник первого приемопередатчика информации, многоканальный аналого-цифровой преобразователь, блок кадровой памяти, блок предварительной обработки изображения сцены, блок стабилизации кадра, морфологический классификатор, блок анализа, блок проверки дальности, формирователь точки прицеливания, первый цифроаналоговый преобразователь и блок визуализации включены последовательно; к другим входам многоканального аналого-цифрового преобразователя подключены выходы датчика температуры воздуха и датчика атмосферного давления; второй и третий выходы приемника первого приемопередатчика информации подключены ко второму и третьему входам блока кадровой памяти, к четвертому и пятому входам которого подключены соответственно второй выход блока стабилизации кадра и выход блока управления рамкой, вход которого соединен с выходом блока анализа; первый выход блока стабилизации кадра соединен также с входом блока захвата, входом классификатора движения цели и входом второго цифроаналогового преобразователя, выход которого через нормально замкнутые контакты переключателя соединен со вторым входом блока визуализации, который через нормально разомкнутые контакты переключателя связан с выходом приемника первого приемопередатчика информации; выход блока захвата подключен ко второму входу морфологического классификатора; первый и второй выходы классификатора движения цели подсоединены соответственно ко второму и третьему входам блока анализа, к выходу которого также подключен вход блока разрешения измерения дальности, выход которого соединен со вторым входом передатчика второго приемопередатчика информации, первый вход которого соединен с выходом блока разрешения выстрела, вход которого подключен ко второму выходу формирователя точки прицеливания; вход счетчика выстрелов соединен с выходом блока разрешения выстрела, а выход - со вторым входом седьмого электронного ключа, первый вход которого подключен к выходу блока стабилизации кадра, выход селектора трассирующей пули подключен ко второму входу блока оценки промаха, первый вход которого соединен с выходом блока проверки дальности, третий вход - с третьим выходом формирователя точки прицеливания, первый выход второго устройства принятия решения соединен со вторым входом формирователя точки прицеливания, а второй выход - со вторым входом первого цифроаналогового преобразователя.
Формирователь точки прицеливания содержит последовательно соединенные устройство оценки координат цели с учетом крена оружия, второе устройство оценки скорости цели, устройство формирования координат цели с учетом баллистических поправок, устройство формирования точки прицеливания, первый, второй и третий выходы которого являются выходами формирователя точки прицеливания и подключены соответственно к входу первого цифроаналогового преобразователя, входу блока разрешения выстрела и третьему входу блока оценки промаха, а второй вход устройства формирования координат цели с учетом баллистических поправок является вторым входом блока, который подключен к первому выходу второго устройства принятия решения.
Электроинициатор содержит последовательно включенные блок питания, преобразователь напряжения, накопитель энергии, первый электронный ключ и трансформатор, выход которого выполнен с возможностью электрического контакта с капсюлем патрона, а второй вход первого электронного ключа соединен со вторым выходом приемника второго приемопередатчика информации.
Капсюль патрона помещен в диэлектрическую втулку, исключающую его электрический контакт с гильзой.
Затвор стрелкового оружия содержит установленную соосно его продольной оси первую диэлектрическую втулку, внутри которой установлена электропроводящая втулка с возможностью электрического контакта с поверхностью чашки капсюля, внутри электропроводящей втулки установлена вторая диэлектрическая втулка, внутри которой размещается боек, причем электропроводящая втулка жестко соединена с одним концом электропроводящего стержня, помещенного внутри третьей диэлектрической втулки, установленной перпендикулярно оси затвора в отверстии, выполненном в корпусе затвора, а другой конец электропроводящего стержня жестко соединен с электропроводящей пластиной, размещенной в продольной проточке корпуса затвора и изолированной от него диэлектрическими пластинами, при этом электропроводящая пластина подключена проводом к одному выводу трансформатора электроинициатора, другой вывод которого подсоединен к ствольной коробке стрелкового оружия.
Селектор трассирующей пули содержит последовательно соединенные устройство пороговой сегментации изображения пули и устройство вычисления координат пули.
Блок оценки промаха содержит таймер, шестой сумматор-ограничитель, последовательно соединенные второй сумматор, десятый электронный ключ и второе запоминающее устройство, а также последовательно соединенные третий сумматор, одиннадцатый электронный ключ и третье запоминающее устройство, при этом вход таймера, являющийся вторым входом блока, подключен к выходу блока разрешения выстрела, а выход - к первому входу шестого сумматора-ограничителя, второй вход которого, являющийся третьим входом блока, подключен к третьему выходу формирователя точки прицеливания; первые входы второго и третьего сумматоров, являющиеся первыми входами блока, подключены к выходу блока селекции трассирующей пули, а их вторые входы, являющиеся четвертыми входами блока, подключены к выходу блока проверки дальности; выход шестого сумматора-ограничителя подключен ко вторым входам десятого и одиннадцатого электронных ключей, а выходы второго и третьего запоминающих устройств являются выходами блока и подключены к входу второго устройства принятия решения.
Второе устройство принятия решения содержит пятый и шестой измерители модулей квадратурных сигналов, седьмой и восьмой сумматоры-ограничители, третью схему И, вторую схему НЕ, двенадцатый и тринадцатый электронные ключи, при этом входы пятого и шестого измерителей модулей квадратурных сигналов, являющиеся входами устройства, соединены также с первыми входами соответственно двенадцатого и тринадцатого электронных ключей, а выходы - с первыми входами соответственно седьмого и восьмого сумматоров-ограничителей, вторые входы которых соединены с источником постоянных сигналов отрицательной полярности, величины которых пропорциональны допустимым значениям промаха, а выходы - с первым и вторым входами третьей схемы И, выход которой соединен со входом второй схемы НЕ, а также, являясь вторым выходом устройства, подключен ко второму входу первого цифроаналогового преобразователя; выход второй схемы НЕ соединен со вторыми входами двенадцатого и тринадцатого электронных ключей, выходы которых являются первым выходом устройства и подключены ко второму входу формирователя точки прицеливания.
Изобретения поясняются чертежами, на которых представлены:
фиг.1 - структурная схема первого варианта устройства для автоматизированного прицеливания и выстрела из стрелкового оружия;
фиг.2 - структурная схема первого приемопередатчика информации;
фиг.3 - структурная схема второго приемопередатчика информации;
фиг.4 - структурная схема блока предварительной обработки изображения сцены;
фиг.5 - структурная схема блока стабилизации кадра;
фиг.6 - структурная схема морфологического классификатора;
фиг.7 - структурная схема первого устройства принятия решения;
фиг.8 - структурная схема блока анализа;
фиг.9 - структурная схема блока проверки дальности;
фиг.10 - структурная схема блока оценки поперечной скорости ветра;
фиг.11 - структурная схема классификатора движения цели;
фиг.12 - структурная схема блока захвата;
фиг.13 - структурная схема формирователя точки прицеливания;
фиг.14 - структурная схема блока разрешения измерения дальности;
фиг.15 - структурная схема блока разрешения выстрела;
фиг.16 - схема блока визуализации;
фиг.17 - структурная схема второго варианта устройства для автоматизированного прицеливания и выстрела из стрелкового оружия;
Фиг.18 - структурная схема электроинициатора;
фиг.19 - эскиз конструкции патрона, модифицированного для электрического воспламенения заряда, и затвора стрелкового оружия;
фиг.20 - структурная схема селектора трассирующей пули;
фиг.21 - структурная схема блока оценки промаха;
фиг.22 - структурная схема второго устройства принятия решения;
фиг.23 - экспериментальные результаты ручного (диаграмма а) и автоматизированного (диаграмма б) прицеливания.
Устройство для автоматизированного прицеливания и выстрела из стрелкового оружия включает оборудование, размещаемое на стрелковом оружии, и оборудование, помещаемое в экипировке стрелка. Описанные блоки устройства структурно построены по известным правилам [5] и выполнены на известной элементной базе вычислительной техники (регистры, операционные усилители, компараторы, сигнальные процессоры, постоянные и оперативные запоминающие устройства, умножители, микросхемы комбинационной логики и т.п.) с соблюдением требований по быстродействию.
В первом варианте устройства для автоматизированного прицеливания и выстрела из стрелкового оружия оборудование, размещаемое на стрелковом оружии, содержит (фиг.1) оптико-электронный датчик (ОЭД) 1, датчик 2 крена оружия, лазерный дальномер (ЛД) 3, аналого-цифровой преобразователь, выполненный с возможностью преобразования напряжения сигналов, поступающих на его входы, в последовательный код (АЦПК) 7, передатчик 8 первого приемопередатчика информации (ППИ), приемник 9 второго ППИ, первый электронный ключ (ЭК) 10, электромагнит с якорем 11, который механически связан со спусковым крючком 12 стрелкового оружия, блок питания 13. ЛД 3 содержит излучатель 4, первый 5 и второй 6 приемники лазерного излучения, которые закреплены на стволе стрелкового оружия и в плоскости, перпендикулярной оси ствола, разнесены между собой на расстояние 50-100 мм. Оптические оси ОЭД 1 и ЛД 3 съюстированы с осью канала ствола стрелкового оружия. Выходы датчика 2 крена оружия, первого 5 и второго 6 приемников ЛД 3 через согласующие устройства (на схеме не показаны) подключены соответственно к первому, второму и третьему входам АЦПК 7, выход которого соединен со вторым входом передатчика 8 первого ППИ, к первому входу которого подключен выход ОЭД 1. К первому выходу приемника 9 второго ППИ подключены последовательно соединенные первый ЭК 10 и обмотка электромагнита с якорем 11. Блок питания (батарея) 13 подключен ко второму входу первого ЭК 10. Второй выход приемника 9 второго ППИ соединен с управляющим входом лазерного излучателя 4 ЛД 3. Описанное оборудование размещено на стрелковом оружии так, что сохраняется возможность традиционного глазомерного прицеливания и ручного выстрела.
Оборудование, входящее в состав экипировки стрелка (фиг.1), содержит последовательно включенные приемник 14 первого ППИ, многоканальный аналого-цифровой преобразователь (АЦП) 15, блок кадровой памяти 16, блок предварительной обработки изображения сцены 17, блок стабилизации кадра 18, морфологический классификатор 19, блок анализа 20, блок проверки дальности 21, формирователь точки прицеливания 22, первый цифроаналоговый преобразователь (ЦАП) 23 и блок визуализации 24. Ко второму и третьему входам АЦП 15 подключены выходы датчика 25 температуры воздуха и датчика 26 атмосферного давления. Второй и третий выходы приемника 14 первого ППИ подключены соответственно ко второму и третьему входам блока кадровой памяти 16, а четвертый и пятый выходы - к первому и второму входам блока оценки поперечной скорости ветра 27, выход которого соединен с четвертым входом блока кадровой памяти 16. К первому выходу блока стабилизации кадра 18 подключены также вход классификатора движения цели 28, блока захвата 29 и второго ЦАП 30, причем выход блока захвата 29 соединен со вторым входом морфологического классификатора 19, а первый и второй выходы классификатора движения цели 28 подключены соответственно ко второму и третьему входам блока анализа 20. Выход второго ЦАП 30 через нормально-замкнутые контакты переключателя 31 связан со вторым входом блока визуализации 24, который через нормально-разомкнутые контакты переключателя 31 связан также с выходом приемника 14 первого ППИ. Выход блока анализа 20 соединен также с входом блока управления рамкой 32 и входом блока разрешения измерения дальности 33. Выход блока управления рамкой 32 подключен к пятому входу блока кадровой памяти 16, шестой вход которого соединен со вторым выходом блока стабилизации кадра 18, а второй выход - со вторым входом блока проверки дальности 21. Выход блока разрешения измерения дальности 33 соединен с первым входом передатчика 34 второго ППИ, ко второму входу которого подключен выход блока разрешения выстрела 35, вход которого соединен со вторым выходом формирователя точки прицеливания 22.
В зависимости от погодных условий и времени суток в качестве ОЭД 1 используется телевизионная или тепловизионная камера. Датчик 2 крена оружия предназначен для измерения угла наклона оружия (в плоскости, перпендикулярной оси ствола) относительно неподвижной (земной) системы координат и учета его при формировании точки прицеливания. В качестве датчика 2 крена оружия может быть использован, например, датчик типа ДК1-А, представляющий собой дифференциальный емкостной преобразователь угла в напряжение с чувствительным элементом в виде капсулы [6].
Первый приемопередатчик информации (фиг.2) включает в себя связанные через эфир (расстояние порядка 5 мм) передатчик 8 и приемник 14. Передатчик 8 содержит последовательно соединенные первый ЧМ-генератор 36, первый полосовой суммирующий усилитель 37 и первый генератор несущей 38. Первым входом передатчика 8 является второй вход полосового суммирующего усилителя 37, к которому подключается выход ОЭД 1, а вторым входом - вход первого ЧМ-генератора 36, к которому подключается выход АЦПК 7. Приемник 14 содержит последовательно соединенные первый амплитудный детектор (АД) 39, полосовой усилитель 40, первый резонансный усилитель (РУ) 42, первый частотный детектор (ЧД) 43, первый усилитель сигнала последовательного кода 44 и преобразователь 45 последовательного кода в параллельный, а также режекторный фильтр (РФ) 41, подключенный к выходу полосового усилителя 40. Входом приемника 14 является вход первого АД 39, первым выходом - выход РФ 41, а вторым, третьим, четвертым и пятым выходами - соответственно первый, второй, третий и четвертый выходы преобразователя 45 последовательного кода в параллельный.
Второй приемопередатчик информации (фиг.3) включает в себя передатчик 34 и приемник 9, связанные между собой, как и первый ППИ, через эфир (расстояние порядка 5 мм). Передатчик 34 содержит последовательно соединенные блок 46 формирования последовательного кода, второй ЧМ-генератор 47, второй резонансный усилитель 48 и второй генератор несущей 49. Приемник 9 содержит последовательно соединенные второй АД 50, третий резонансный усилитель 51, второй ЧД 52, второй усилитель сигнала последовательного кода 53 и дешифратор последовательного кода 54, первый выход которого является первым выходом приемника 34 и подсоединяется к третьему входу ЭК 10, а второй выход - вторым выходом приемника, который подключен к управляющему входу лазерного излучателя 4 ЛД 3.
Конструктивно первый и второй приемопередатчики информации выполнены в виде модуля помехоустойчивого обмена сигналами между аппаратурой оружия и стрелка. Обмен сигналами осуществляется в дециметровом диапазоне волн (471,25 МГц), причем между контурами передатчиков и приемников связь индуктивная. Контуры настроены на несущую частоту и подсоединены к передатчикам и приемникам коаксиальными кабелями. Ширина полосы пропускания контуров регулируется путем подбора коэффициента включения кабеля в контур. Исполнение катушки индуктивности и конденсатора каждого контура планарное на металлизированной с одной стороны диэлектрической пластине. Конструктивно контур выполнен в виде одного витка диаметром 20 мм полоскового проводника шириной не более 1 мм в качестве катушки индуктивности и полоскового конденсатора с площадью поверхности ~0,25 см2, выполненных на одной стороне диэлектрической пластины из стеклотекстолита толщиной 1...1,5 мм. Другая сторона пластины имеет сплошную металлизацию. Полосковая катушка индуктивности одним выводом соединена со сплошной металлизацией, а другим - с обкладкой полоскового конденсатора. Другой обкладкой конденсатора служит сплошная металлизация пластины. Коаксиальный кабель соединен оплеткой со сплошной металлизацией пластины, а центральной жилой - с витком полосковой катушки индуктивности. Точка подсоединения подбирается при настройке ширины полосы пропускания контура. Настройка контура на нужную частоту производится путем изменения размеров обкладки полоскового конденсатора. Один из контуров устанавливается на прикладе стрелкового оружия металлизированной поверхностью пластины к поверхности приклада в месте приложения ладони стрелка. Другой контур закреплен на перчатке стрелка со стороны, обращенной к прикладу стрелкового оружия, причем сплошная металлизация диэлектрической пластины должна быть обращена к ладони стрелка. Разработанный и изготовленный макет модуля индуктивной связи между контурами, настроенный на частоту 475 МГц, некритичен к смещению контуров относительно друг друга в плоскости, параллельной плоскости пластин, и изменяет коэффициент передачи по напряжению не более чем на 6 дБ, при удалении поверхностей пластин друг от друга на расстояние не более 5 мм. Конструкцией устройства предусмотрена замена модуля бесконтактной двусторонней связи (т.е. исключение первого и второго ППИ) кабельными соединениями для подключения выходов ОЭД 1, датчика 2 крена оружия, первого 5 второго 6 приемников лазерного дальномера 3 к соответствующим входам АЦП 15, а также подключения выхода блока разрешения измерения дальности 33 ко входу лазерного излучателя 4 ЛД 3, выхода блока разрешения выстрела 35 ко второму входу первого электронного ключа 10 (на структурной схеме устройства фиг.1 показаны пунктиром).
Якорь электромагнита 11 механически связан со спусковым крючком 12 стрелкового оружия, например, посредством спускового механизма, содержащего тягу, имеющую выступы, взаимодействующие с курком и шепталом. Одним концом тяга устанавливается на якоре электромагнита 11 шарнирно посредством оси [7].
В качестве АЦП 15 могут быть использованы АЦП, например, типа AD876, AD9040 фирмы Analog Devices. Датчики 25, 26 синоптической обстановки предназначены для использования полученных с их помощью данных для внесения баллистических поправок при формировании точки прицеливания. В качестве датчика 25 температуры воздуха может быть использован датчик с вольтовым выходом типа AD22100, измеряющий температуру воздуха в диапазоне от -50°С до +15°С. Он имеет выходную шкалу 22,5 мВ/град [8]. В качестве датчика 26 атмосферного давления может быть использован датчик типа 1860 31F, измеряющий давление в диапазоне 250-1400 мбар [9].
Блок кадровой памяти 16 предназначен для хранения оцифрованного изображения сцены в текущем кадре и информации от датчиков (угол крена оружия, дальность до сцены (цели), температура окружающего воздуха, атмосферное давление, поперечная скорость ветра), используемой при определении баллистических поправок в формирователе точки прицеливания, а также для стабилизации текущего изображения сцены в кадре позиционирования окна анализа в каждом кадре. Он выполнен в виде запоминающего устройства, которое содержит соответствующие ячейки памяти для хранения текущих кадров с изображениями сцены и информации от датчиков.
Блок предварительной обработки изображения сцены 17 предназначен для фильтрации шумов. Он содержит (фиг.4) последовательно соединенные медианный фильтр 55 по строкам с размерами окна 1×3 пикс. и медианный фильтр 56 по столбцам с размерами окна 3×1 пикс.
Блок стабилизации кадра 18 предназначен для вычисления и последующей компенсации смещения текущего изображения в кадре относительно опорного изображения сцены (первого кадра). Он содержит (фиг.5) устройство 57 хранения опорного изображения сцены (первого кадра) и устройство 58 хранения изображения в текущем кадре, входы которых объединены и подключены к выходу блока предварительной обработки изображения сцены 17, а выходы соединены соответственно с первым и вторым входами устройства 59 привязки, выход которого является вторым выходом блока 18 и подключен к шестому входу блока кадровой памяти 16. Второй выход устройства 58 хранения изображения в текущем кадре является первым выходом блока 18, который подключен к входам морфологического классификатора 19, классификатора движения цели 28, блока захвата 29 и второго ЦАП 30.
Морфологический классификатор 19 предназначен для селекции цели и определения ее координат. Он содержит (фиг.6) устройство 61 идентификации границ областей фона, устройство 66 оценки координат цели, первое устройство 67 принятия решения, последовательно соединенные устройство 60 структуризации множества яркостей, устройство 62 выделения “пиков” или “долин”, устройство 63 выделения цели, устройство 64 оценки качества селекции цели, устройство 65 уточнения параметров цели. Первый вход устройства 60 и вход устройства 61 объединены и являются первым входом морфологического классификатора, который подключен к выходу блока стабилизации кадра 18. Выход устройства 61 идентификации границ областей фона соединен со вторым входом устройства 63 выделения цели, к выходу которого также подключен вход первого устройства 66 оценки координат цели, выход которого соединен со вторым входом первого устройства 67 принятия решения, первый вход которого подключен к выходу устройства 64 оценки качества селекции цели. Выход устройства 65 уточнения параметров цели соединен со вторым входом устройства 60 структуризации множества яркостей, являющимся вторым входом морфологического классификатора, а его выходом - выход первого устройства 67 принятия решения, который подключен к блоку анализа 20.
Первое устройство 67 принятия решения (фиг.7) содержит первый сумматор-ограничитель (СО) 68, второй 69 и третий 70 электронные ключи (ЭК), первое 71 и второе 72 запоминающие устройства (ЗУ). Первый вход первого СО 68 соединен с выходом устройства 64 оценки качества селекции цели, второй вход - с источником постоянного сигнала отрицательной полярности, величина которого пропорциональна допустимому значению показателя качества селекции цели, а выход - со вторыми входами соответственно второго 69 и третьего 70 ЭК. Их первые входы соединены с выходом устройства 66 оценки координат цели, а выходы - со входами соответственно первого 71 и второго 72 ЗУ, выходы которых подключены к первому входу блока анализа 20.
Блок анализа 20 предназначен для формирования координат цели. Он содержит (фиг.8) первую схему НЕ 73, четвертый 74, пятый 75 и шестой 76 ЭК, первый сумматор 77 и первую схему ИЛИ 78. Первые входы четвертого 74 и пятого 75 ЭК объединены и являются первым входом блока, первый вход шестого ЭК 76 - вторым входом блока, а объединенные вход первой схемы НЕ 73 и вторые входы пятого 75 и шестого 76 ЭК - третьим входом блока анализа. Выход первой схемы НЕ 73 соединен со вторым входом четвертого ЭК 74, выход которого соединен с первым входом первой схемы ИЛИ 78. Выходы пятого 75 и шестого 76 ЭК соединены соответственно с первым и вторым входами первого сумматора 77, выход которого соединен со вторым входом первой схемы ИЛИ 78, выход которой является выходом блока анализа, который подключен к входам блока проверки дальности 21, блока управления рамкой 32 и блока разрешения измерения дальности 33.
Блок проверки дальности 21 предназначен для обеспечения формирования координат точки прицеливания только при наличии измеренной дальности до цели. Он содержит (фиг.9) второй сумматор-ограничитель 79, выход которого соединен со вторыми входами седьмого 80 и восьмого 81 ЭК, первые входы которых подключены к выходам блока анализа 20, а их выходы являются выходом блока проверки дальности 21. Первый вход второго СО 79, являющийся вторым входом блока проверки дальности, подключен ко второму выходу блока кадровой памяти 16, а второй вход - к источнику постоянного сигнала отрицательной полярности, величина которого пропорциональна значению минимальной измеряемой дальности до цели, при котором разрешается выстрел.
Блок оценки поперечной скорости ветра 27 предназначен для получения баллистических поправок с учетом ветровой обстановки при формировании точки прицеливания. Он содержит (фиг.10) последовательно соединенные коррелятор 82 и вычислитель поперечной скорости ветра 83.
Классификатор движения цели 28 предназначен для селекции подвижной цели по признаку движения. Он содержит (фиг.11) устройство 84 хранения текущего изображения (центральной области текущего кадра) и устройство 85 хранения опорного изображения (центральной области первого кадра), выходы которых подключены соответственно к первому и второму входам вычислителя 86 разностного изображения (попиксельно разности текущего и опорного изображений), к выходу которого последовательно подключены первое устройство 87 сегментации разностного изображения, второе устройство 88 оценки координат цели и первое устройство 89 оценки скорости цели. Устройства 84, 85 выполнены в виде запоминающих устройств, а устройства 86-89 являются вычислительными устройствами специализированного вычислителя на базе, например, спецпроцессора из серии TMS320 или Neuro Matrix NM6403. Входы устройств 84 и 85 объединены и являются входом блока классификатора движения цели, а выходы второго устройства 88 оценки координат цели и первого устройства 89 оценки скорости цели являются первым и вторым его выходами, которые подключены соответственно ко второму и третьему входам блока анализа 20.
Блок захвата 29 предназначен для захвата цели на автосопровождение, определения горизонтального, вертикального размеров изображения цели и знака контраста цели. Он содержит (фиг.12) последовательно соединенные устройство 90 кластерного анализа, устройство 91 сегментации изображения и устройство 92 формирования значений горизонтального и вертикального размеров изображения цели, знака контраста цели.
Формирователь точки прицеливания 22 предназначен для формирования координат точки прицеливания с учетом измеренных баллистических параметров и движения цели. Он содержит (фиг.13) последовательно соединенные третье устройство 93 оценки координат цели с учетом угла крена оружия, второе устройство 94 оценки скорости цели, устройство 95 формирования координат цели с учетом баллистических поправок, устройство 96 формирования точки прицеливания, первый и второй выходы которого являются выходами формирователя точки прицеливания и подключены соответственно к входу первого ЦАП 23 и входу блока разрешения выстрела 35.
Блок разрешения измерения дальности 33 предназначен для обеспечения надежного измерения лазерным дальномером ЛД 3 дальности до цели. Он содержит (фиг.14) первый 97 и второй 99 измерители модулей входных квадратурных сигналов, соответственно синусного - х и косинусного - у, выходы которых подключены соответственно к первым входам третьего 98 и четвертого 100 сумматоров-ограничителей, на вторые входы которых поступают постоянные сигналы отрицательной полярности, величина которых пропорциональна допустимым отклонениям оси лазерного луча излучателя 4 ЛД 3 от линии визирования цели. Выходы третьего 98 и четвертого 100 СО подключены соответственно к первому и второму входам первой схемы И 101. Входами блока 33 являются входы первого 97 и второго 99 измерителей модулей входных квадратурных сигналов, которые подключены к выходу блока анализа 20, а выходом - выход первой схемы И 101, соединенный с первым входом передатчика 34 второго приемопередатчика информации (ППИ).
Блок разрешения выстрела 35 предназначен для формирования сигнала разрешения выстрела при ошибке прицеливания, не превышающей зоны разрешения выстрела, под которой понимается область значений ошибок прицеливания, в пределах которой разрешается выстрел. По структуре блок 35 идентичен блоку разрешения измерения дальности 33 и содержит (фиг.15) третий 102 и четвертый 104 измерители модулей входных квадратурных сигналов, соответственно синусного - х и косинусного - у, выходы которых подключены соответственно к первым входам пятого 103 и шестого 105 сумматоров-ограничителей, на вторые входы которых поступают постоянные сигналы отрицательной полярности, величина которых пропорциональна зоне разрешения выстрела. Выходы пятого 103 и шестого 105 СО подключены соответственно к первому и второму входам второй схемы И 106. Входами блока 35 являются входы третьего 102 и четвертого 104 измерителей модулей входных квадратурных сигналов, которые подключены к выходу формирователя точки прицеливания 22, а выходами - выходы второй схемы И 106, первый из которых соединен со вторым входом передатчика 34 второго ППИ. В случае замены модуля бесконтактной двусторонней связи (например, при отказе ППИ) второй выход второй схемы И 106 подключается ко второму входу первого электронного ключа 10 с помощью кабеля (на фиг.1 и фиг.14 показано пунктирной линией).
Блок визуализации 24 предназначен для представления стрелку на экране монитора стабилизированного телевизионного изображения сцены в пределах поля зрения оптической системы ОЭД 1, индикации электронной марки, светящейся точки прицеливания и сигнала попадания в цель. В качестве блока визуализации 24 могут быть использованы телевизионный монитор с окуляром, смонтированный на каске под “удобный” для наблюдения глаз стрелка, или голографические очки, прикрепленные к каске и позволяющие наблюдать текущую реальную обстановку на местности. В примере осуществления изобретения блок визуализации 24 содержит (фиг.16) размещенные в шлеме 107 стрелка 108 модуль монитора 109 (с жидкокристаллической матрицей или ее функциональным аналогом) и герметичный оптический модуль 110, состоящий из входного окна 111, выходного окна 112, мониторного окна 113 и оптического корректора 115. В нижней части герметичного оптического модуля 110 напротив мониторного окна 113 расположено зеркало 114 с возможностью регулирования угла установки его плоскости так, чтобы изображение с монитора 109 легко и удобно попадало в глаз стрелка через оптический корректор 115. Герметичный оптический модуль 110 укреплен перед лицом стрелка так, чтобы он мог свободно обозревать через входное 111 и выходное 112 окна лежащую перед ним местность с возможностью бинокулярного наблюдения изображения на экране монитора 109, который укреплен внутри верхней лобной части шлема 107 так, что плоскость экрана занимает примерно горизонтальное положение. (На схеме фиг.16 пунктирными линиями обозначены зоны расположения в шлеме устройств жизнеобеспечения и др., не относящихся к заявленному устройству). В режиме автоматизированного прицеливания первый вход модуля монитора 109 соединен с выходом первого ЦАП 23, а второй вход через нормально-замкнутые контакты переключателя 31 подключен к выходу второго ЦАП 30 (фиг.1). При желании, а также в ночное время суток стрелок с помощью переключателя 31 имеет возможность подключения модуля монитора 109 непосредственно к выходу приемника 14 первого ППИ.
Второй вариант устройства для автоматизированного прицеливания и выстрела из стрелкового оружия (фиг.17) по сравнению с первым вариантом имеет следующие отличия. В оборудовании, размещаемом на стрелковом оружии, лазерный дальномер ЛД 3 содержит только первый приемник 5 лазерного излучения, выход которого соединен со входом АЦПК 7. Вместо электромагнита с якорем 11 в приемной части оборудования использован электроинициатор 116, выход которого выполнен с возможностью электрического контакта с капсюлем 117 патрона. В оборудовании, размещаемом в экипировке стрелка, исключен блок оценки поперечной скорости ветра и дополнительно введены последовательно соединенные счетчик выстрелов 118, седьмой электронный ключ 119, селектор трассирующей пули 120, блок 121 оценки промаха и второе устройство принятия решения 122. При этом вход счетчика выстрелов 118 соединен с выходом блока 35 разрешения выстрела, а выход - со вторым входом седьмого ЭК 119, первый вход которого подключен к выходу блока стабилизации кадра 18. Выход селектора трассирующей пули 120 подключен ко второму входу блока 121 оценки промаха, первый вход которого соединен с выходом блока проверки дальности 21, третий вход - с третьим выходом формирователя точки прицеливания 22. Первый выход второго блока принятия решения 122 соединен со вторым входом формирователя точки прицеливания, а второй выход - со вторым входом первого цифроаналогового преобразователя ЦАП 23.
Электроинициатор 116 содержит (фиг.18) последовательно включенные блок питания 13, преобразователь напряжения 123, накопитель энергии 124, первый электронный ключ 10 и трансформатор 125, выход которого является выходом устройства. При этом второй вход первого ЭК 10 соединен со вторым выходом приемника 9 второго приемопередатчика информации.
Для осуществления изобретения по второму варианту патрон модифицирован для электрического воспламенения взрывчатого вещества 129 капсюля 117, а затвор стрелкового оружия снабжен устройством для подвода высокого напряжения к чашке капсюля патрона. Модифицированный патрон стрелкового оружия содержит (фиг.19) гильзу 126, в которой заключен заряд взрывчатого вещества 127. В донце гильзы соосно ее продольной оси установлена диэлектрическая втулка 128, в которой помещен капсюль 117 патрона. Таким образом, металлическая чашка капсюля 117 электрически изолирована от гильзы 126.
Устройство для подвода высокого напряжения к чашке капсюля 117 патрона, которым снабжен затвор 130 стрелкового оружия, содержит (фиг.19) установленную соосно его продольной оси первую диэлектрическую втулку 131, внутри которой установлена электропроводящая втулка 132 с возможностью контакта с поверхностью чашки капсюля 117, внутри этой втулки установлена вторая диэлектрическая втулка 133, внутри которой размещается боек 134. Электропроводящая втулка 132 жестко соединена с одним концом электропроводящего стержня 137, помещенного внутри третьей диэлектрической втулки 138, установленной перпендикулярно оси затвора в отверстии, выполненном в корпусе затвора 130. Другой конец электропроводящего стержня 137 соединен с электропроводящей пластиной 136, размещенной в продольной проточке корпуса затвора 130 и изолированной от него диэлектрическими пластинами 136, 139. Электропроводящая пластина 136 подключена проводом к одному выводу трансформатора 125 электроинициатора 111, другой вывод которого подсоединен к ствольной коробке стрелкового оружия (на чертежах не показано).
Счетчик выстрелов 118 предназначен для формирования сигнала управления седьмым ЭК 119. Он может быть выполнен, например, в виде сумматора-накопителя импульсов тока.
Селектор трассирующей пули 120 содержит (фиг. 20) последовательно соединенные устройство 140 пороговой сегментации изображения пули и устройство 141 вычисления координат пули.
Блок оценки промаха 121 содержит (фиг.21) таймер 142, шестой сумматор-ограничитель 143, последовательно соединенные первый сумматор 144, десятый ЭК 145 и второе ЗУ 146, а также последовательно соединенные второй сумматор 147, одиннадцатый ЭК 148 и третье ЗУ 149. Вход таймера 142, являющийся вторым входом блока 121, подключен к выходу блока разрешения выстрела 35 (фиг.17), а выход - к первому входу шестого сумматора-ограничителя 143, второй вход которого, являющийся третьим входом блока 121, подключен к третьему выходу формирователя точки прицеливания 22. Первые входы первого 144 и второго 147 сумматоров, являющиеся первыми входами блока 121, подключены к выходу блока 120 селекции трассирующей пули, а их вторые входы, являющиеся четвертыми входами блока 121 (на фиг.17 они показаны одной связью) подключены к выходу блока проверки дальности 21. Выход шестого сумматора-ограничителя 143 подключен ко вторым входам десятого 145 и одиннадцатого 148 ЭК. Выходы второго 146 и третьего 149 ЗУ являются выходами блока 121 и подключены к входу второго устройства принятия решения 122.
Второе устройство принятия решения 122 содержит (фиг.22) пятый 150 и шестой 152 измерители модулей квадратурных сигналов, седьмой 151 и восьмой 153 сумматоры-ограничители, третью схему И 154, вторую схему НЕ 155, двенадцатый 156 и тринадцатый 157 электронные ключи. Входы пятого 150 и шестого 152 измерителей модулей квадратурных сигналов, являющиеся входами устройства, соединены также с первыми входами соответственно двенадцатого 156 и тринадцатого 157 ЭК, а выходы - с первыми входами соответственно седьмого 151 и восьмого 153 сумматоров-ограничителей, вторые входы которых соединены с источником постоянных сигналов отрицательной полярности, величины которых пропорциональны допустимым значениям промаха, а выходы - с первым и вторым входами третьей схемы И 154, выход которой соединен со входом второй схемы НЕ 155, а также, являясь вторым выходом устройства, подключен ко второму входу первого ЦАП 23. Выход второй схемы НЕ 155 соединен со вторыми входами двенадцатого 156 и тринадцатого 157 ЭК, выходы которых являются первым выходом устройства и подключены ко второму входу формирователя точки прицеливания 22.
Первый вариант устройства для автоматизированного прицеливания и выстрела из стрелкового оружия работает следующим образом (фиг.1). В зависимости от метеоусловий и времени суток на стрелковом оружии в качестве ОЭД 1 устанавливают либо телевизионную камеру, либо тепловизионную камеру. После наведения стрелкового оружия на цель стрелок включает источник электропитания устройства (на схеме фиг.1 не показан). При этом включаются ОЭД 1 и лазерный дальномер ЛД 3. На выходе ОЭД 1 выделяются видеосигналы, мгновенные значения которых в каждом кадре пропорциональны яркости отдельных элементов изображения сцены, т.е. изображения цели и окружающего фона в пределах окна, ограниченного полем зрения оптической системы ОЭД 1. Эти видеосигналы поступают на первый вход передатчика 8 первого приемопередатчика информации (ППИ). Сигналы с выходов первого 5 и второго 6 приемников ЛД 3, пропорциональные дальности до цели, сигналы с выхода датчика 2 крена оружия, пропорциональные мгновенным значениям угла поворота оружия вокруг оси ствола относительно вертикальной оси в плоскости, перпендикулярной оси ствола, подаются на входы АЦПК 7, где квантуются по уровню, преобразуются в последовательный код и поступают на второй вход передатчика 8 первого ППИ. После обработки по известным правилам в соответствии со структурной схемой фиг.2 амплитудно-модулированные сигналы с выхода передатчика 8 первого ППИ, несущие информацию об изображении сцены, дальности до цели и угле крена оружия, излучаются в пространство (на расстояние порядка 5 мм) и принимаются приемником 14 первого ППИ, где обрабатываются по известным правилам в соответствии со структурной схемой фиг.2. Аналоговые сигналы с его выхода, а также сигналы с выходов датчика 25 температуры воздуха и датчика 26 атмосферного давления поступают на соответствующие входы многоканального АЦП 15, где они преобразуются в цифровую форму. При этом каждый кадр изображения сцены представляет собой множество точек пространственного разложения поля зрения ОЭД 1 с квантованным по уровню значением яркости в каждой точке, а сигналы от датчиков 25, 26 квантуются по уровню и кодируются. С выхода многоканального АЦП 15 цифровая информация поступает в блок кадровой памяти 16. На его второй и третий входы подаются со второго и третьего выходов приемника 14 первого ППИ сигналы угла крена оружия и дальности до цели, через его пятый вход с выхода блока управления рамкой 32 подается цифровая информация о размерах рамки, ограничивающей поле анализа, а через шестой вход - величины смещения по вертикали и горизонтали текущего изображения (текущего кадра) относительно опорного изображения (первого кадра) со второго выхода блока стабилизации кадра 18. На четвертый вход блока 16 поступают сигналы, пропорциональные поперечной скорости ветра с блока 27. Эти сигналы получают следующим образом. На первый и второй входы коррелятора 82 блока оценки поперечной скорости ветра 27 (фиг.10) подаются сигналы лазерных приемников 5 и 6 ЛД 3 соответственно u1(n) и u2(n), где  - номера текущих временных отсчетов указанных сигналов. Коррелятор 82 вычисляет взаимно-корреляционную функцию
- номера текущих временных отсчетов указанных сигналов. Коррелятор 82 вычисляет взаимно-корреляционную функцию

где s=0...0,1N;
σ(u1), σ(u2) - среднеквадратичные отклонения сигналов u1 и u2;
m(u1)= - математическое ожидание сигнала u1;
- математическое ожидание сигнала u1;
m(u2)= - математическое ожидание сигнала u2.
- математическое ожидание сигнала u2.
Последовательным сравнением определяют максимум взаимно-корреляционной функции Кmax(S0) и соответствующее ему время Т0=Т·S0, где Т - период дискретизации. Затем устройство 83 вычисляет поперечную скорость ветра Vw=D/T0, где D – расстояние между оптическими осями первого 5 и второго 6 приемников ЛД 3. Значение этой скорости также поступает в блок кадровой памяти 16. Цифровая информация об изображении сцены с выхода блока кадровой памяти 16 поступает в блок предварительной обработки изображения 17 (фиг.4), в котором осуществляется медианная фильтрация шума изображения медианным фильтром 55 по строкам с размерами окна 1×3 пикс. и медианным фильтром 56 с размерами окна 3×1 пикс. Далее сигналы поступают в блок стабилизации кадра 18 (фиг.5), где в устройство 57 хранения опорного изображения сцены записывается и хранится центральная область 128×256 пикс. первого кадра в качестве эталона изображения, а в устройство 58 - изображение текущего кадра. В устройстве 59 осуществляется корреляционная привязка текущего изображения к эталонному. Вычисленные координаты смещения текущего изображения относительно эталонного (соответствующие экстремуму корреляционной функции) с выхода устройства 59 привязки подаются на шестой вход блока кадровой памяти 16, а сигналы текущего изображения кадра со второго выхода устройства 58 хранения текущего кадра параллельно поступают на входы морфологического классификатора 19, классификатора движения цели 28, блока захвата 29 и второго ЦАП 30.
В блоке захвата 29 (фиг.12) в результате кластерного анализа в устройстве 90 и сегментации изображения первого кадра в устройстве 91 устройством 92 формируются данные о ближайшей к центру кадра выделенной цели: линейные размеры по горизонтали и вертикали и знак контраста цели.
Кластерный анализ изображения осуществляется по известным правилам следующим образом. Входное изображение кластеризуется на области, примерно однородные по яркости. Каждая точка изображения в окне анализа рассматривается как выборочный образ. За центр первого кластера принимается яркостная точка в центре окна анализа. В первом цикле в пространстве яркостей определяется наиболее удаленная точка от выбранного центра кластеризации. Если это расстояние больше некоторого порога, то такая точка берется за второй центр кластеризации. В следующем цикле определяется расстояние каждого яркостного образа от этих центров и выбирается минимальное из них, характеризующее наиболее удаленную точку среди тех, что были отнесены к определенному кластеру. Если это расстояние больше определенной величины, выраженной в долях расстояния между кластерами, то такая точка назначается центром третьего кластера и процесс кластеризации повторяется уже для трех кластеров и т.д. Заканчивается он тогда, когда максимальное расстояние среди всех кластеров окажется ниже порога.
В результате получается множество из центров кластеризации. Для этих центров выполняется первый цикл кластеризации и определяются групповые средние в каждом кластере. Эти групповые средние сравниваются с текущими центрами. Если расстояние между любым из центров и групповым средним больше порога, то старые центры заменяются новыми групповыми средними и процесс кластеризации повторяется. Итерации заканчиваются, когда расстояние между всеми новыми и старыми центрами будет меньше определенного порога. Относительно центров кластеризации строится кластер-карта изображения, у которой яркости точек замещаются номерами кластеров [5].
Затем производится сегментация изображения первого кадра в окне анализа: для каждого кластера нумеруются связные области путем построчного просмотра кластер-карты и отображения ее в карту номеров четырехсвязных областей. После этого формируются исходные данные для морфологической классификации: определяются размеры и контрастная яркость цели со знаком. Для каждой области с номером определяются размеры описывающего прямоугольника и координаты его центра. За искомую принимается область, ближайшая к центру окна анализа. Если расстояние от этой области до центра окна анализа больше порогового, то операция захвата цели повторяется. Размеры ближайшей к центру области отождествляются с размерами описывающего прямоугольника. Для установления знака контрастной яркости относительно центра области выделяется прямоугольная область и для всех ее точек подсчитывается сумма яркостей, по которой определяется знак контраста цели [5].
С выхода блока захвата 29 эти данные поступают на второй вход морфологического классификатора 19 (фиг.6), на первый вход которого поступают изображения текущих кадров из блока стабилизации кадра 18. В морфологическом классификаторе осуществляется селекция выбранной цели в течение всего времени прицеливания до момента выстрела или до момента исчезновения изображения цели. В устройстве 60 структуризации множества яркостей по размеру и форме изображения цели, поступившему из блока захвата 29, формируется структурирующий элемент множества яркостей. В зависимости от знака контрастной яркости изображения цели исходное множество яркостей в окне анализа либо замыкается посредством структурирующего элемента, либо размыкается. Наращение и эрозия многоуровневого множества яркостей на изображении выполняется последовательно сначала по строкам изображения, а затем по столбцам. В результате наращения все темные пятна затираются, а само изображение становится более светлым. Эрозия затирает светлые пятна на изображении, если их размер меньше, чем размер структурирующего элемента. Эрозия наращения замыкает многоуровневое множество яркостей, устраняя все малоразмерные темные пятна в пределах окна анализа, а наращение эрозии размыкает это множество, подавляя локальные светлые пятна и перешейки между ними. Локальные светлые пятна на изображении образуют “пики” многоуровневого множества яркостей, а темные пятна - его “долины”, которые выделяются устройством 62. В устройстве 61 идентификации границ определяется наличие границ областей фона в кадре изображения, поступившего из блока стабилизации кадра 18. Сигналы с выходов устройств 60 и 61 поступают в устройство 63 выделения цели, где с учетом информации о границах областей фона в окне анализа изображения в окне анализа бинаризируются, в результате чего все малоразмерные фрагменты с яркостью ниже пороговой устраняются, а среди оставшихся нумеруются все связные образования. Размеры пронумерованных областей отождествляются с размерами описанных прямоугольников, а координаты центров - с положением центра тяжести каждого из них. Если связных областей несколько, то за селектируемую цель принимается область, ближайшая к центру окна анализа и для нее определяется знак контрастной яркости. В очередном кадре будут выделяться либо “пики” на многоуровневом множестве яркостей, если цель ярче фона, либо “долины”, если цель темнее фона. Сигналы с выхода устройства 63 выделения цели поступают на вход устройства 64 оценки качества селекции и на вход первого устройства 66 оценки координат цели. В устройстве 64 по величине измеренного отклонения центра цели от центра окна анализа определяется качество селекции цели и соответствующий сигнал поступает в устройство 65 уточнения параметров цели, где при хорошем качестве селекции уточняются размеры и знак контраста изображения цели. Эта информация с выхода устройства 65 подается на второй вход устройства 60. В первом устройстве 66 оценки координат цели оцениваются координаты цели как центр тяжести выделенной области и сигналы, пропорциональные их значениям, подаются на второй вход первого устройства 67 принятия решения, на первый вход которого поступают сигналы с выхода устройства 64 оценки качества селекции цели. Первое устройство 67 принятия решения (фиг.7) работает следующим образом. Текущее значение оценки качества селекции цели с выхода устройства 64 подается на первый вход первого сумматора-ограничителя 68, на второй вход которого поступает постоянный сигнал отрицательной полярности, пропорциональный допустимому значению показателя качества селекции.
Эти сигналы суммируются, и если результирующий сигнал будет отрицательным, то на выходе первого СО 68 формируется логическая единица, которая подается на вторые входы второго 69 и третьего 70 электронных ключей, открывая их. При этом текущие значения координат цели, поступающие с выхода устройства 66 на первые входы второго 69 и третьего 70 ЭК, подаются на первое 71 и второе 72 ЗУ, а с их выходов - на первый вход блока анализа 20. При плохом качестве селекции цели результирующий сигнал в первом СО 68 положителен и на его выходе формируется логический ноль. При этом второй 69 и третий 70 ЭК закрываются, текущие значения координат цели с выхода устройства 66 через них не пропускаются и на блок анализа 20 поступают координаты цели, хранящиеся в первом 71 и втором 72 ЗУ.
В классификаторе движения цели 28 (фиг.11) центральная область кадра изображения 128×256 пикс. текущего изображения запоминается в блоке хранения текущего изображения 84, а центральная область первого кадра 128×256 пикс. запоминается в качестве эталона в блоке хранения эталона 85. Информация об этих цифровых изображениях поступает соответственно на первый и второй входы вычислителя разностного изображения 86, в котором из значения яркости каждого пикселя текущего изображения Lти (i, j) вычитается значение яркости соответствующего пикселя эталона Lэ(i, j). В результате формируется разностное изображение:
Lp(i,j)=Lти(i,j)-Lэ(i,j),
где i=1...128, j=1...256 - пиксели по вертикали и горизонтали соответственно.
Далее полученное разностное изображение подвергается пороговой сегментации в устройстве 87 сегментации разностного изображения, в результате которой выделяются подвижные объекты. В следующем втором устройстве 88 оценки координат цели определяются координаты ближайшей к центру кадра подвижной цели как координаты центра описанного прямоугольника, т.е.
Х=(Хmах+Xmin)/2; Y=(Ymax+Ymin)/2,
где Xmin, Хmах, Ymin, Ymax - координаты соответственно левой, правой, верхней и нижней границ изображения цели.
В результате межкадрового сглаживания с одинаковым весом координат в каждом кадре вычисляются сглаженные оценки координат цели

где xk, yk - соответственно вычисленные координаты цели в К-м кадре;
0,5 - коэффициент сглаживания;
 - соответственно сглаженные оценки координат цели в К-м кадре, пропорциональные координатам цели.
- соответственно сглаженные оценки координат цели в К-м кадре, пропорциональные координатам цели.
Эти сигналы, пропорциональные координатам цели, поступают на вход первого устройства оценки скорости цели 89, а также на второй вход блока анализа 20. В первом устройстве оценки скорости цели 89 формируется логическая единица, если выделена подвижная цель, и логический ноль, если цель неподвижна. Эта информация подается на третий вход блока анализа 20, первый вход которого соединен с выходом морфологического классификатора 19.
В блоке анализа 20 (фиг.8, на которой представлена схема, для одной координаты, схема для другой координаты идентична) информация о полученной в морфологическом классификаторе 19 координате цели параллельно поступает на первые входы четвертого 74 и пятого 75 электронных ключей. Сигнал скорости цели с выхода устройства оценки скорости цели 89 классификатора движения цели 28 параллельно поступает на вход первой схемы НЕ 73 и на вторые входы пятого 75 и шестого 76 ЭК. На первый вход шестого ЭК 76 поступает сигнал с выхода второго устройства 88 оценки координат цели классификатора движения цели 28. Если цель неподвижна, пятый 75 и шестой 76 ЭК закрыты (т.к. с выхода устройства оценки скорости цели 89 классификатора движения цели 28 поступает логический ноль), на их выходах сигналов нет и вычисленная в морфологическом классификаторе 19 координата цели поступает через открытый четвертый 74 ЭК на первый вход первой схемы ИЛИ 78 и проходит на ее выход. Если выделена подвижная цель, то четвертый 74 ЭК закрыт, а пятый 75 и шестой 76 ЭК открыты, т.к. на их входы с выхода устройства оценки скорости цели 89 классификатора движения цели 28 поступает логическая единица. Значение координаты, полученное в морфологическом классификаторе 19, через открытый пятый 75 ЭК поступает на первый вход первого сумматора 77, на второй вход которого поступает через открытый шестой 76 ЭК значение координаты, полученное в классификаторе движения 28. В первом сумматоре 77 вычисляется полусумма входных значений, которая поступает на второй вход первой схемы ИЛИ 78 и затем на ее выход. Информация о координатах цели, полученная в блоке анализа 20, поступает в блок управления рамкой 32 для коррекции координат центра рамки, которые затем передаются с выхода этого блока на второй вход блока кадровой памяти 16 для коррекции координат центра окна анализа. Сигналы с выхода блока анализа 20 (значения координат цели) поступают также в блок проверки дальности 21 и блок разрешения измерения дальности 33.
В блоке проверки дальности 21 (фиг.9) сигнал, пропорциональный измеренной дальности до цели, со второго выхода блока кадровой памяти 16 поступает на первый вход второго сумматора-ограничителя 79, на второй вход которого подается постоянный сигнал отрицательной полярности, пропорциональный минимальной измеряемой дальности (например, 30-50 м, измерять которую нецелесообразно). На выходе СО 79 формируется логическая единица, если разностный сигнал положительный. В этом случае седьмой 80 и восьмой 81 ЭК будут открыты и сигналы, пропорциональные координатам цели, с выхода блока анализа 20 проходят через них далее в формирователь точки прицеливания 22. Если разностный сигнал в СО 79 отрицателен, то на его выходе формируется логический ноль, седьмой 80 и восьмой 81 ЭК будут закрыты и координаты цели на вход формирователя точки прицеливания 22 не поступают.
В блоке разрешения измерения дальности 33 (фиг.14) на выходах первого 97 и второго 99 измерителей модулей квадратурных сигналов, соответственно синусного - х и косинусного - у, получают модули координат цели х и у, которые подаются на первые входы третьего 98 и четвертого 100 сумматоров-ограничителей, на вторые входы которых поступают постоянные сигналы отрицательной полярности, пропорциональные зоне разрешения измерения дальности. На выходе сумматоров-ограничителей формируются логическая единица, если разностный сигнал отрицателен, и логический ноль, если разностный сигнал положителен. При значениях координат цели, не выходящих за зону разрешения измерения дальности, что соответствует допустимым отклонениям луча лазерного дальномера ЛД 3 относительно линии визирования цели, сигналы с выходов третьего 98 и четвертого 100 СО поступают соответственно на первый и второй входы первой схемы И 101, а с ее выхода - на первый вход передатчика 34 второго ППИ, который передает их через эфир (расстояние порядка 5 мм) в приемник 9 второго ППИ. После соответствующей обработки в нем формируется сигнал управления, который с первого выхода приемника 9 подается на управляющий вход излучателя 4 ЛД 3. Он излучает лазерный импульс в направлении цели длительностью ≈0,8 с. Принимаемый первым 5 и вторым 6 приемниками ЛД 3 отраженный от цели сигнал используется для измерения дальности до нее и оценки поперечной скорости ветра.
В формирователе точки прицеливания 22 (фиг.13) в устройстве 93 оценки координат цели с учетом крена оружия определяются координаты цели в неподвижной (земной) системе координат Хн, Ун по известным формулам [9]

где ϕ - угол крена ствола оружия в плоскости, перпендикулярной оси ствола, относительно земной системы координат.
Далее во втором устройстве 94 оценки скорости цели определяются составляющие скорости цели Vx и Vy по формулам
Vx=(Хн-Xнo)/qT,
Vy=(Yн-Yнo)/qT,
где Хн, Yн, Хно, Yнo - координаты цели в текущем и первом кадрах соответственно;
q - число кадров, разделяющих текущий и первый кадры;
Т - период следования кадров.
Затем получают сглаженные оценки скорости цели в текущем n-м кадре:

В устройстве 95 формирования координат с учетом баллистических поправок формируются координаты точки прицеливания в неподвижной системе координат с учетом этих поправок и движения цели
Xnm=Xн+XV+Xw+Xd,
Ymn=Yn+YV+YΘ+Yt+Yp,
где Хн; Yн - координаты цели в неподвижной (земной) системе координат;
ХV=Vxtn; YV=Vytn - поправки на движение цели за время tn полета пули до цели;
Хw - поправка на поперечный ветер;
Хd - поправка на деривацию;
YΘ - угол прицеливания;
Yt - поправка на температуру окружающего воздуха;
Yр - поправка на атмосферное давление.
Указанные поправки хранятся в памяти блока 95 в табличном виде. Интервалы дискретизации параметров, в которых вычисляются соответствующие поправки, составляют: по дальности 20 м, по поперечной скорости ветра 1 м/с, по температуре 5°С, по давлению 10 мм рт.ст. Значения поправок для более мелких интервалов дискретизации, чем в известных таблицах стрельбы, вычисляются линейной интерполяцией известных табличных значений [10].
Затем вычисленные координаты точки прицеливания относительно центра кадра (который также индицируется в виде марки прицела) в неподвижной системе координат подвергаются в блоке формирования точки прицеливания 96 обратному преобразованию в подвижную, жестко связанную со стволом стрелкового оружия, систему координат с учетом крена оружия:
Ху=Хтпcosϕ+YТПsinϕ,
Yy=-XТПsinϕ+YТПcosϕ.
Информация об этих координатах со второго выхода устройства формирования точки прицеливания 96 формирователя точки прицеливания 22 поступает на вход блока разрешения выстрела 35. Для удобства визуализации взаимного положения точки прицеливания и марки прицела в устройстве формирования точки прицеливания 96 формируются координаты точки прицеливания со смещением начала координат на значения (а, b)
ХВ=ХТПcosϕ+YТПsinϕ+а,
YВ=-XТПsinϕ+YТПcosϕ+b,
где а, b - координаты смещения марки прицела относительно центра кадра соответственно по горизонтали и вертикали.
Электронное смещение начала координат в любой удобный для стрелка квадрант (например, в верхнюю часть второго квадранта) относительно центра кадра не мешает наблюдению текущего положения цели и упрощает процедуру прицеливания. С первого выхода устройства формирования точки прицеливания 96 формирователя точки прицеливания 22 цифровая информация о координатах точки прицеливания и марки прицела поступает на вход первого цифроаналогового преобразователя ЦАП 23, где преобразуются в аналоговую форму. Эти сигналы далее поступают на второй вход блока визуализации 24, преобразуются по известным правилам и индицируются на экране монитора 109 (фиг.16) в виде двух светящихся точек. Наблюдая светящиеся точки (марку прицела и точку прицеливания), стрелок стремится их совместить соответствующими перемещениями стрелкового оружия.
Координаты точки прицеливания со второго выхода формирователя точки прицеливания 22 поступают в блок разрешения выстрела 35 (фиг.15) на соответствующие входы третьего 102 и четвертого 104 измерителей модулей входных квадратурных сигналов, соответственно синусного - х и косинусного - у, с выходов которых модули сигналов поступают соответственно на первые входы третьего 103 и четвертого 105 сумматоров-ограничителей, на вторые входы которых поступают постоянные сигналы отрицательной полярности, пропорциональные зоне разрешения выстрела (представляющей собой область с центром в точке прицеливания, ограниченную заранее выбранными допустимыми ошибками прицеливания). На выходе третьего 103 и четвертого 105 СО формируется логическая единица, если разность координат марки прицела и точки прицеливания отрицательная или равна нулю, и логический ноль, если разность положительная. Сигналы с выходов третьего 103 и четвертого 105 СО поступают соответственно на первый и второй входы второй схемы И 106, выход которой является выходом блока разрешения выстрела 35. Когда на оба входа второй схемы И 106 поступают логические единицы, т.е. точка прицеливания не выходит из зоны разрешения выстрела, на ее выходе возникает сигнал, который поступает на второй вход передатчика 34 и принимается приемником 9 второго ППИ.
Сигнал разрешения выстрела со второго выхода приемника 9 (фиг.1) поступает на второй вход первого электронного ключа 10 и открывает его. При этом импульс тока от блока питания (батареи) 13 подается на обмотку электромагнита 11, подвижный якорь которого, перемещаясь в электромагнитном поле, отклоняет спусковой крючок 12 с помощью тяги. При этом боек ударяет по капсюлю патрона и происходит выстрел.
Во втором варианте устройства (фиг.17) формирование прицельной информации для стрелка осуществляется аналогично первому варианту, за исключением того, что не оценивается поперечная скорость ветра. Поэтому измерение дальности до цели производится с помощью одного приемника 5 ЛД 3. Автоматизированный выстрел производится с помощью электроинициатора 116 (фиг.18), который работает следующим образом. Низкое напряжение блока питания (батареи) 13 подается в преобразователь 123, который преобразует его в высокое напряжение порядка 400В и передает далее в накопитель энергии 124. Сигнал разрешения выстрела со второго выхода приемника 9 второго ППИ поступает на второй вход первого электронного ключа 10 и открывает его. Импульс разряда накопителя 124 проходит через первый вход открытого первого ЭК 10 и поступает на вход высоковольтного трансформатора 125. На его выходе формируется импульс высокого напряжения порядка 10 кВ, который поступает на токопроводящую втулку 133 устройства для подвода высокого напряжения к чашке капсюля патрона (фиг.19), установленного в затворе стрелкового оружия. Благодаря электрическому контакту втулки 133 с наружной поверхностью чашки капсюля 117 патрона осуществляется электрический подрыв ВВ 129 капсюля, ВВ 127 патрона и выстрел. При длительности импульса разряда 5 мс с током ~20 мА при напряжении 10 кВ энергия импульса разряда составляет ~1 Дж. Для создания такой энергии разряда при напряжении 400В емкость конденсатора накопителя энергии 124 составит ~13 мкФ. Для увеличения надежности электрического подрыва емкость конденсатора может быть увеличена до 100 мкФ. Коэффициент передачи высоковольтного трансформатора 125 равен 10000/400=25.
Завершающий этап автоматизированного прицеливания и выстрела во втором варианте изобретения осуществляется следующим образом. Сигнал выхода блока разрешения выстрела 35 подается одновременно на вход передатчика 34 второго ППИ и вход счетчика выстрелов 42. При первом выстреле трассирующей пулей счетчик 42 выдает управляющий сигнал, который, поступая на второй вход седьмого электронного ключа 119, открывает его. Через первый вход ЭК 119 на его выход проходит текущее изображение с выхода блока стабилизации кадра 18 и поступает в селектор трассирующей пули 120 (фиг.20), где по известным правилам в устройстве 140 осуществляется пороговая сегментация текущего изображения. Ближайшая к центру изображения выделенная область принимается за изображение трассирующей пули, координаты которой в устройстве 141 определяются как координаты центра описанного прямоугольника.
Вычисленные координаты трассирующей пули xn, yn с выхода селектора 120 поступают на первые входы соответственно первого 144 и второго 147 сумматоров блока оценки промаха 121 (фиг.21), на вторые входы которых поступают координаты цели х, у с выхода блока проверки дальности 21. На первый вход шестого сумматора-ограничителя 143 подается информация с выхода формирователя точки прицеливания 22 о времени полета пули до цели, соответствующем измеренной дальности до цели и взятом из таблицы баллистических поправок, хранящейся в памяти устройства, а на второй вход СО 143 - значение времени с выхода таймера 142, который запускается сигналом с выхода блока разрешения выстрела 35. Оценка величины промаха формируется на выходах первого 144 и второго 147 сумматоров
dx=x-xn; dy=y-yn.
В шестом СО 143 сигнал, пропорциональный текущему времени полета пули t, который поступает с выхода таймера 142, суммируется с сигналом, пропорциональным времени полета пули tn на измеренную дальность, поступившим из блока 22. При значениях разности dt=tn-t, равной нулю или меньшей 0,04 с, на выходе СО 143 формируется логическая единица, которая открывает десятый 145 и одиннадцатый 148 ЭК и через них сигналы, пропорциональные оценке промаха dx=х-хn, dy=у-уn, с выходов первого 144 и второго 147 сумматоров поступают соответственно во второе 146 и третье 149 ЗУ, а с их выходов - на входы соответственно пятого 150 и шестого 152 измерителей модулей квадратурных сигналов и входы двенадцатого 156 и тринадцатого 157 электронных ключей во втором устройстве принятия решения 122 (фиг.22). Вычисленные модули разностей координат цели и трассирующей пули в плоскости цели (промах) с выходов первого 150 и второго 152 измерителей поступают на первые входы соответственно седьмого 151 и восьмого 153 сумматоров-ограничителей, на вторые входы которых подается постоянный сигнал отрицательной полярности, пропорциональный заранее определенным допустимым значениям промаха. При нулевых или отрицательных значениях вычисленных в седьмом 151 и восьмом 153 СО разностей на их выходах формируются логические единицы, которые поступают на третью схему И 154, на выходе которой формируется логическая единица. Она подается на второй вход первого ЦАП 23, где преобразуется в аналоговый сигнал, который поступает в блок визуализации 24 на модуль монитора 109 для индикации попадания в цель путем высвечивания индекса в виде, например, знака “х”. При положительных значениях разностей, вычисленных в седьмом 151 и восьмом 153 СО, или хотя бы в одном из них, на их выходах, или выходе одного из них, формируются логические ноли, на выходе третьей схемы И 154 также формируется логический ноль. При этом на мониторе 109 блока визуализации 24 индекс попадания в цель не высвечивается. С выхода третьей схемы И 154 логический ноль подается на вторую схему НЕ 155, на выходе которой формируется логическая единица, которая передается на вторые входы двенадцатого 156 и тринадцатого 157 электронных ключей, которые открываются. При этом сигналы, пропорциональные значениям промаха dx и dy, с входа второго устройства принятия решения 122 через указанные ЭК проходят на его выход и подаются на второй вход устройства 95 формирования координат цели с учетом баллистических поправок формирователя точки прицеливания 22 для коррекции координат точки прицеливания в следующем выстреле. Для повышения точности выстрела время задержки t3 в цепи исполнения выстрела (это интервал времени от момента возникновения сигнала на выходе блока разрешения выстрела 35 до момента выстрела) оценивается экспериментально для каждого типа стрелкового оружия, в котором используется данное устройство, и добавляется к времени полета пули tп до цели, т.е. t=tп+t3. Эта величина используется для более точной оценки координат точки прицеливания в блоке формирования координат с учетом баллистических поправок 95 формирователя точки прицеливания 22.
Использование изобретения позволяет существенно повысить эффективность применения стрелкового оружия в различных метеоусловиях и время суток за счет обеспечения возможности автоматизированного прицеливания из различных положений, в том числе с упора, с колена, стоя от бедра, с упора над головой, сбоку, при ходьбе. Лабораторные и полевые испытания макета устройства показали (например, фиг.23, где а - результаты ручного прицеливания из положения стоя, б - автоматизированного), что в этих положениях стрельбы значения среднеквадратичных отклонений ошибки автоматизированного прицеливания и выстрела меньше соответствующих ошибок ручного прицеливания и выстрела в 5-20 раз по горизонтали и в 3,5-15 раз по вертикали.
Источники информации
1. WO 9530124А1, кл. F 41 А 33. 02. 1995.
2. FR 2718226 А1, кл. F 41 G 3/02, 1994.
3. DE 19719977 C1, кл. F 41 G 3/00, 1998.
4. FR 2 699 996, кл. F 41 G 3/00, 1/387, F 41 A 17/00, 1994.
5. RU 2173881 С2, кл. G 06 K 9/62, F 41 G 7/00, 2001.
6. Интернет, file: A:\t\ Температурные датчики общего назначения: htm.
7. SU 1830443 A1, кл. F 41 A 19/58, 1993.
8. Интернет, file: // A: \Датчики\Влажность\Специальные датчики - Датчики влажности: htm.
9. A.Г.Цыпкин. Справочник по математике для средних учебных заведений. - М.: Наука, 1983.
10. Таблицы стрельбы по наземным целям из стрелкового оружия калибров 5,45 и 7,62 мм. - М.: Воениздат, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКАНАЛЬНОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ НАЗЕМНЫХ ОБЪЕКТОВ | 2005 |
|
RU2350889C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ СРЕДСТВ ОГНЕВОГО ПОРАЖЕНИЯ ПО АКУСТИЧЕСКИМ КОЛЕБАНИЯМ НА ДАЛЬНОСТИ ОТ 500 М | 2023 |
|
RU2810603C1 |
| ПРИЦЕЛЬНОЕ УСТРОЙСТВО ДЛЯ СТРЕЛКА С ОПОЗНАВАНИЕМ "СВОЙ-ЧУЖОЙ" | 2019 |
|
RU2728511C1 |
| СТРЕЛКОВЫЙ ТРЕНАЖЁР | 2019 |
|
RU2774375C2 |
| ТРЕНАЖЕР НАВОДЧИКОВ-ОПЕРАТОРОВ УСТАНОВОК ПУСКА РАКЕТ | 2006 |
|
RU2334935C2 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ НЕСКОЛЬКИХ СНАЙПЕРОВ | 2011 |
|
RU2498191C1 |
| СТРЕЛКОВЫЙ ВИДЕОТРЕНАЖЕР | 1997 |
|
RU2132036C1 |
| СТРЕЛКОВЫЙ ТРЕНАЖЕР | 2002 |
|
RU2310150C2 |
| СТРЕЛКОВОЕ ЛЕГКОЕ ОРУЖИЕ С АВТОМАТИЗИРОВАННОЙ ЭЛЕКТРОННО-ОПТИЧЕСКОЙ СИСТЕМОЙ ПРИЦЕЛИВАНИЯ И СПОСОБ ПРИЦЕЛИВАНИЯ | 2015 |
|
RU2605664C1 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС СОВРЕМЕННОГО БОРТОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2726301C1 |
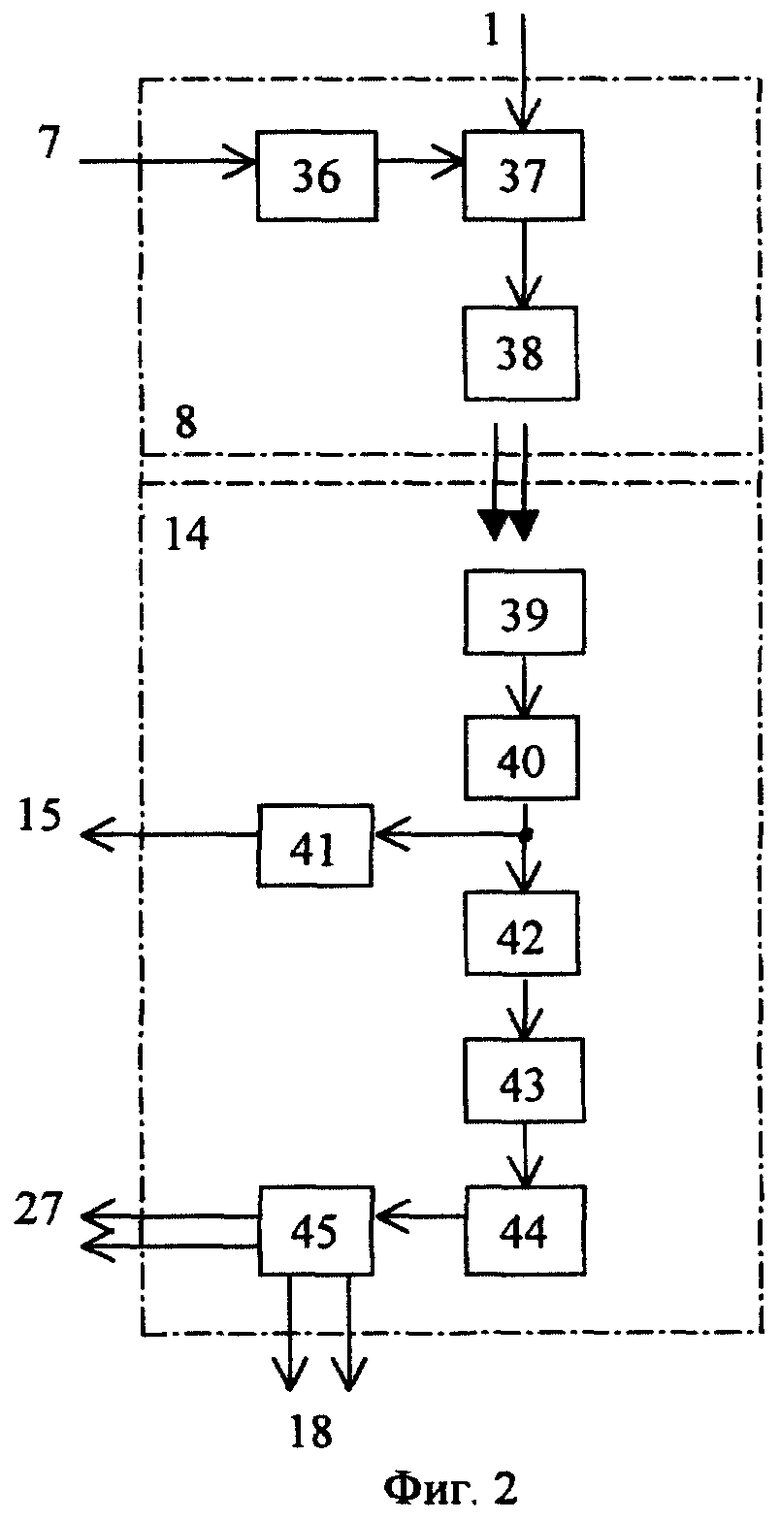

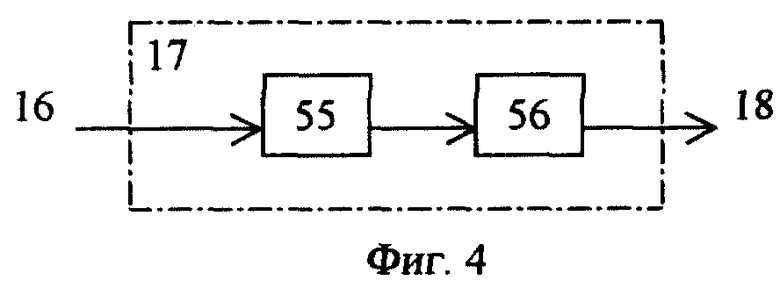
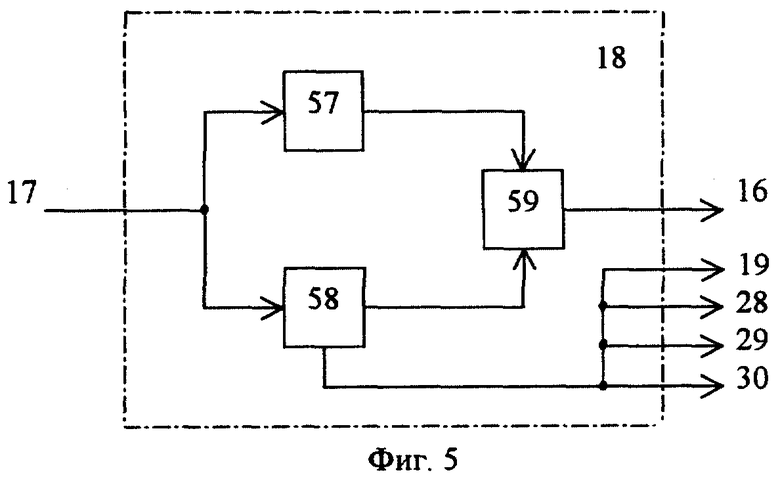
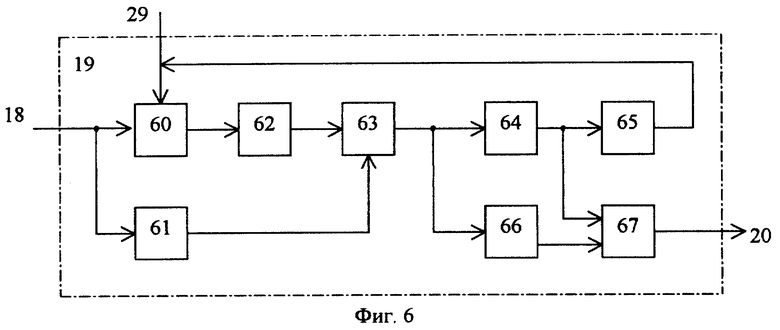
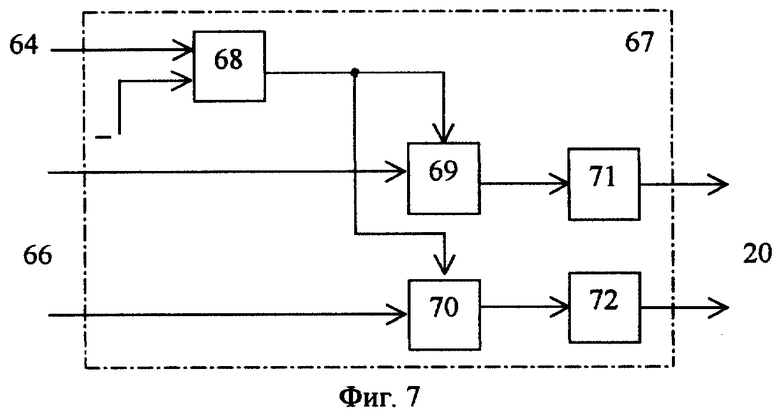
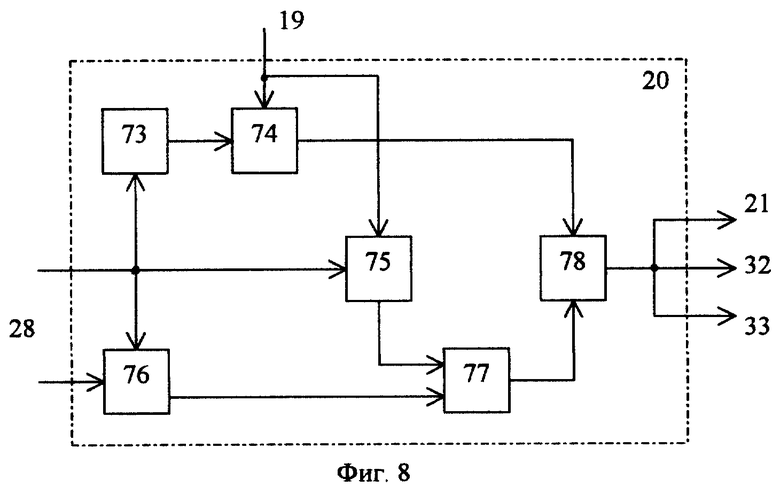
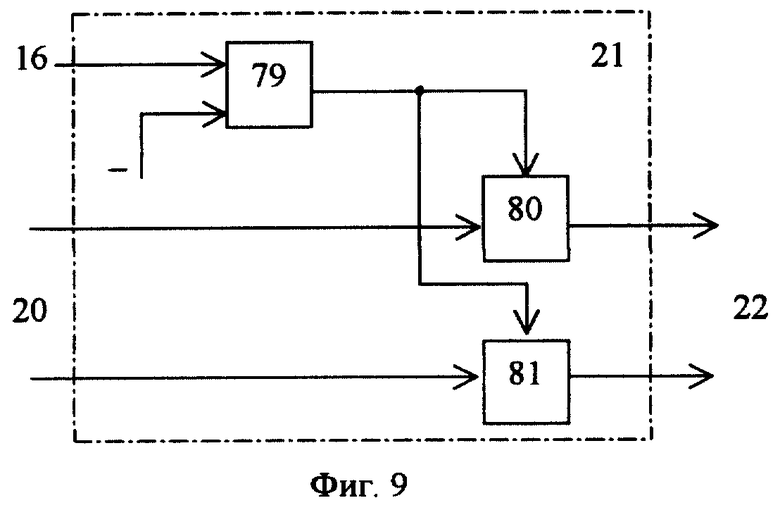

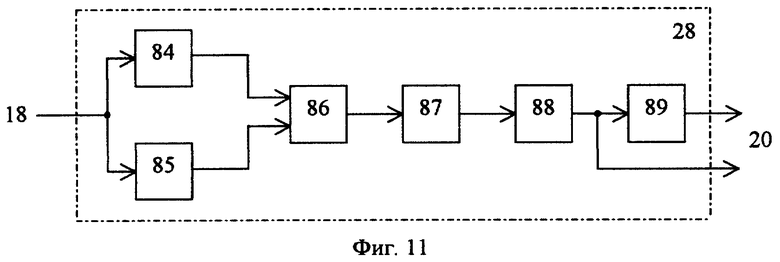
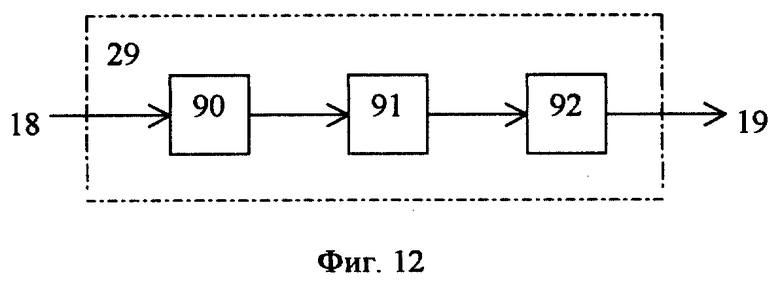
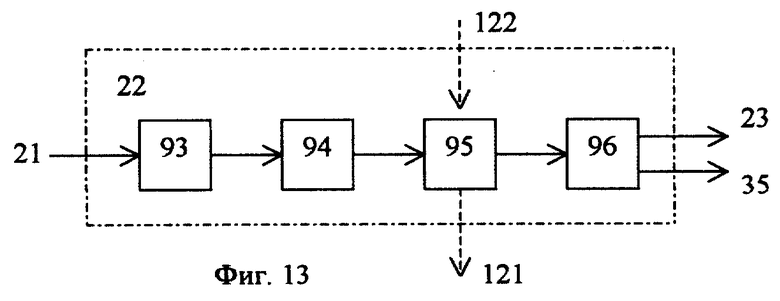

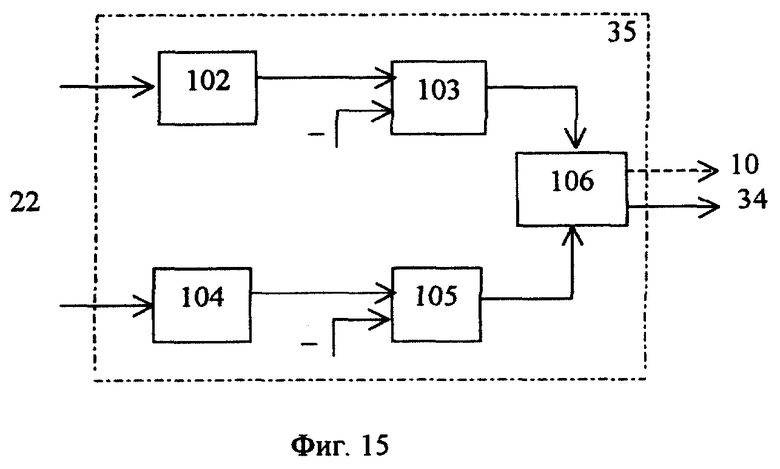


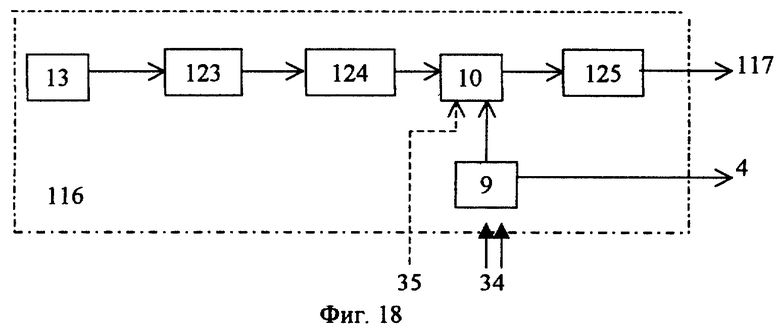

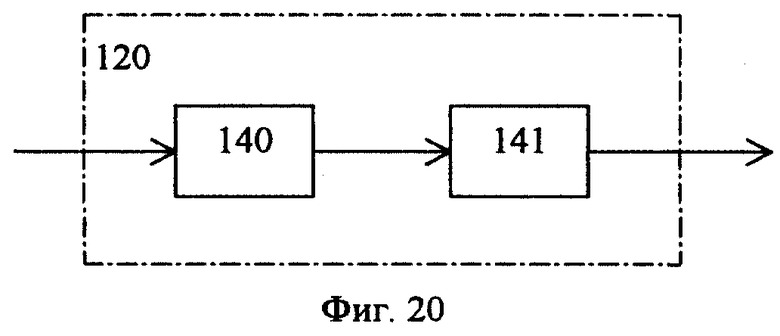

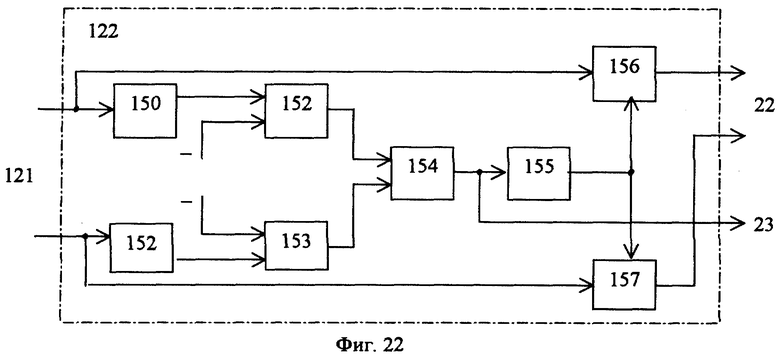

Группа изобретений относится к оружейной техники. Технический результат - повышение точности и быстродействия. Устройство для автоматизированного прицеливания и выстрела из стрелкового оружия состоит из оборудования, размещаемого в экипировке стрелка, и оборудования, размещаемого на стрелковом оружии, которое связано между собой с помощью двух приемопередатчиков или с помощью кабелей. Оборудование, размещаемое на стрелковом оружии, содержит оптико-электронный датчик, датчик крена оружия, лазерный дальномер, аналого-цифровой преобразователь напряжения в последовательный код, передатчик первого приемопередатчика информации, приемник второго приемопередатчика информации, первый электронный ключ, блок питания и электромагнит с якорем. Выходы датчика крена оружия, первого и второго приемников лазерного дальномера подключены к входам аналого-цифрового преобразователя напряжения в последовательный код, выход которого и выходы оптико-электронного датчика соединены с входами передатчика первого приемопередатчика информации, первый выход приемника второго приемопередатчика информации соединен с управляющим входом излучателя лазерного дальномера, ко второму выходу приемника второго приемопередатчика информации последовательно подключены первый электронный ключ и электромагнит, якорь которого механически связан со спусковым крючком стрелкового оружия, а второй вход первого электронного ключа соединен с блоком питания. Оборудование, размещаемое в экипировке стрелка, содержит последовательно соединенные приемник первого приемопередатчика информации, аналого-цифровой преобразователь, блок кадровой памяти, блок предварительной обработки изображения сцены, блок стабилизации кадра, морфологический классификатор, блок анализа, блок проверки дальности, формирователь точки прицеливания, первый цифроаналоговый преобразователь и блок визуализации. К другим входам аналого-цифрового преобразователя подключены выходы датчика температуры воздуха и датчика атмосферного давления; второй и третий выходы приемника первого приемопередатчика информации подключены ко второму и третьему входам блока кадровой памяти, а четвертый и пятый выходы - к первому и второму входам блока оценки поперечной скорости ветра, выход которого соединен с четвертым входом блока кадровой памяти, к пятому и шестому входам которого подключены соответственно второй выход блока стабилизации кадра и выход блока управления рамкой, вход которого соединен с выходом блока анализа. Первый выход блока стабилизации кадра соединен также с входом блока захвата, входом классификатора движения цели и входом второго цифроаналогового преобразователя, выход которого через нормально замкнутые контакты переключателя соединен со вторым входом блока визуализации, который через нормально разомкнутые контакты переключателя связан с выходом приемника первого приемопередатчика информации. Выход блока захвата подключен ко второму входу морфологического классификатора; первый и второй выходы классификатора движения цели подсоединены соответственно ко второму и третьему входам блока анализа, к выходу которого также подключен вход блока разрешения измерения дальности, выход которого соединен со вторым входом передатчика второго приемопередатчика информации, первый вход которого соединен с выходом блока разрешения выстрела, вход которого подключен ко второму выходу формирователя точки прицеливания. Второй вариант устройства отличается от первого тем, что в оборудовании, размещаемом на стрелковом оружии, лазерный дальномер содержит только первый приемник лазерного излучения, выход которого соединен со входом аналого-цифрового преобразователя напряжения в последовательный код, а вместо электромагнита с якорем в приемной части оборудования использован электроинициатор, выход которого выполнен с возможностью электрического контакта с капсюлем патрона. В оборудовании, размещаемом в экипировке стрелка, исключен блок оценки поперечной скорости ветра и дополнительно введены последовательно соединенные счетчик выстрелов, седьмой электронный ключ, селектор трассирующей пули, блок оценки промаха и второе устройство принятия решения. При этом вход счетчика выстрелов соединен с выходом блока разрешения выстрела, а выход - со вторым входом седьмого электронного, первый вход которого подключен к выходу блока стабилизации кадра. Выход селектора трассирующей пули подключен ко второму входу блока оценки промаха, первый вход которого соединен с выходом блока проверки дальности, третий вход - с третьим выходом формирователя точки прицеливания. Первый выход второго блока принятия решения соединен со вторым входом формирователя точки прицеливания, а второй выход - со вторым входом первого цифроаналогового преобразователя. 2 н. и 35 з.п. ф-лы, 23 ил.
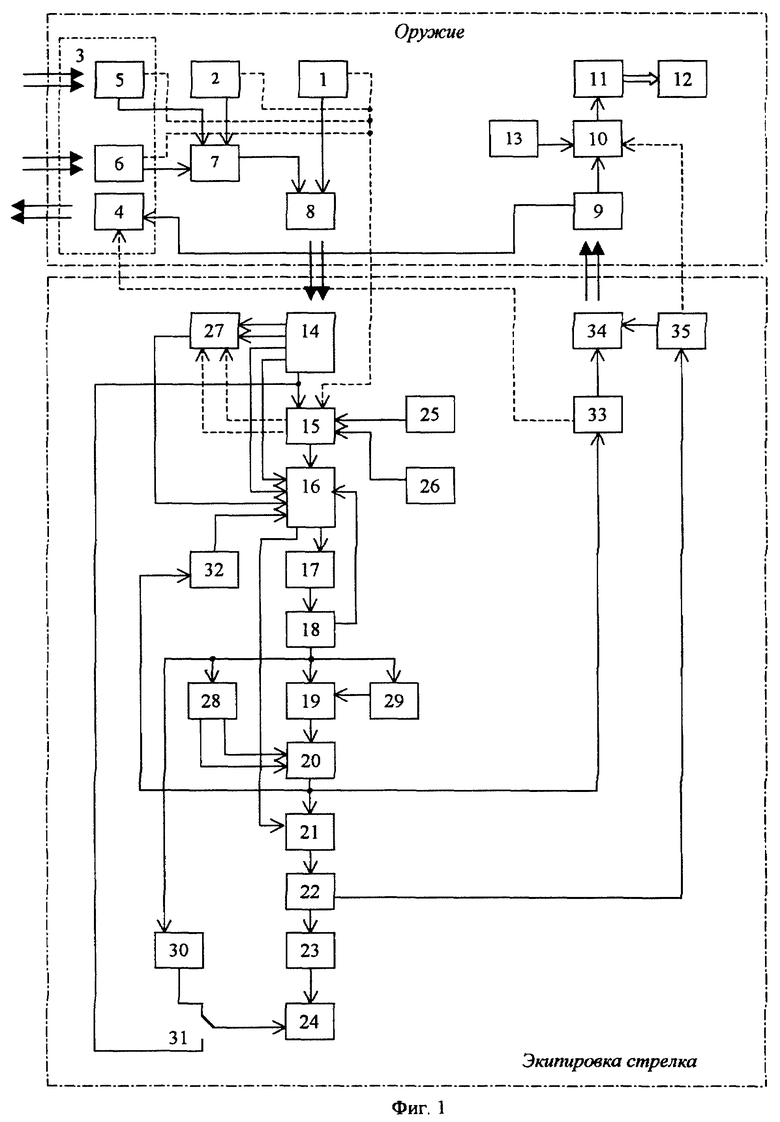
| КОМПОЗИЦИЯ ПОЛИОЛЕФИНА С УЛУЧШЕННОЙ УДАРНОЙ ПРОЧНОСТЬЮ | 2017 |
|
RU2699996C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ МОЛЕКУЛ И АТОМОВ ГАЗА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2255398C2 |
| СПОСОБ ЭЛЕКТРООГНЕВОЙ ОЧИСТКИ ВЫХЛОПНЫХ ГАЗОВ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2175074C2 |
| Центробежный насос | 1988 |
|
SU1605027A1 |

