Изобретение относится к медицинской технике, а именно к высокочастотной электрохирургической аппаратуре, и может быть использовано в хирургии для рассечения и коагуляции мягких тканей организма.
Известен электрохирургический аппарат, содержащий генератор мощности, электрододержатель, пассивный электрод, компрессор для подачи жидкости в зону рассечения тканей, блок управления (патент Японии №6040883, А 61 В 17/39, 1989 г.).
Известное устройство позволяет реализовать автоматическую ирригацию (орошение рабочей части активного электрода жидкостью), в случае, если полное сопротивление нагрузки достигло заданного порогового значения. Это позволяет устранить пригарание тканей. Устройство применяется для точных электрохирургических воздействий в нейрохирургии, при сосудистых операциях.
Известный электрохирургический аппарат по патенту Японии №6040883 содержит ряд существенных недостатков.
В данном устройстве для определения момента включения подачи жидкости используется автоматическая система регулирования, входным параметром которой является полное сопротивление нагрузки. Учитывая, что само электрохирургическое воздействие может быть кратковременным в зависимости от методики и техники хирурга, а система подачи жидкости инерционна, вся система может оказаться неработоспособной.
При подаче жидкости в зону электрохирургического воздействия наблюдается ее значительное скапливание в области операционной раны, это обуславливает необходимость периодического включения отсасывателя, что осложняет ход операции.
Реализованная в данном устройстве автоматическая система подачи жидкости в техническом исполнении является сложной, что снижает надежность работы электрохирургического аппарата. Кроме того, аппарат предусматривает измерение выходных параметров - ток и напряжение, с их последующей аналоговой и цифровой обработкой для оценки сопротивления ткани в зоне электрохирургического воздействия. Учитывая, что аналоговые устройства инерционны, при ряде хирургических воздействий управление по данной схеме может быть мало эффективно.
Известен также электрохирургический аппарат (патент РФ №2161932, А 61 В 18/18), содержащий генератор мощности, первый выход которого соединен с входом электрододержателя, второй выход - с пассивным электродом, третий выход - с первым входом компрессора, четвертый выход - с первым входом блока управления, второй и третий входы которого подключены соответственно к первому и второму выходам электрододержателя, блок управления соединен двунаправленной многоразрядной шиной с генератором мощности, а своим выходом подключен ко второму входу компрессора, первый вход ультразвукового генератора подключен к пятому выходу генератора мощности, второй вход - к выходу блока управления, а выход соединен с распылительной камерой, которая соединена пневмомагистралью с пневматическим выходом компрессора, а другой пневмомагистралью - с пневматическим входом электрододержателя.
Электрододержатель содержит корпус с расположенными на нем органами управления, дистальный конец электрододержателя имеет гнездо для крепления рабочего инструмента, а проксимальный конец - разъемы для подключения к генератору мощности, к пневмомагистрали распылительной камеры и блоку управления.
В полости корпуса электрододержателя коаксиально его продольной оси помещен нагреватель воздушно-капельной смеси, внутри которого расположен канал подачи воздушно-капельной смеси, вход которого соединен с разъемом пневмомагистрали распылительной камеры на проксимальном конце электрододержателя, а выход расположен на торцевой поверхности дистального конца электрододержателя.
В электрохирургическом аппарате по патенту РФ №2161932 реализована система ирригации воздушно-капельной смесью зоны контакта рабочего инструмента с тканью и рабочей части инструмента. Это позволяет: обеспечить полноценную коагуляцию в глубине ткани при ее минимальной деструкции на поверхности; исключить прилипание и пригарание ткани к рабочей части активного электрода.
Медицинская практика использования электрохирургического аппарата, реализованного по патенту РФ №2161932, выявила следующий эксплуатационный недостаток аппарата. При продолжительном воздействии и при завышенном уровне подводимой мощности происходит перегрев биологической ткани в области воздействия и перегрев самого рабочего инструмента, при этом охлаждения воздушно-капельной смесью бывает в некоторых случаях недостаточно для обеспечения постоянного теплового режима электрохирургического воздействия. Как следствие этого, происходит перегрев ткани, увеличивается область некроза, возрастает опасность перфорации тонкостенных сосудов, усиливается нагарообразование на поверхности рабочего инструмента.
Настоящее изобретение решает задачу регулирования термонагрева биологической ткани в зоне операции и автоматического контроля уровня мощности электрохирургического воздействия, подводимой к объекту.
Решение поставленной задачи достигается следующим образом.
В электрохирургическом аппарате, содержащем генератор мощности, первый выход которого соединен с входом электрододержателя, второй выход - с пассивным электродом, третий выход - с первым входом компрессора, четвертый выход - с первым входом блока управления, второй и третий входы которого подключены соответственно к первому и второму выходам электрододержателя, блок управления двунаправленной многоразрядной шиной соединен с генератором мощности, а своим выходом подключен ко второму входу компрессора, первый вход ультразвукового генератора подключен к пятому выходу генератора мощности, второй вход - к выходу блока управления, а выход соединен с распылительной камерой, которая соединена пневмомагистралью с пневматическим выходом компрессора, а другой пневмомагистралью с пневматическим входом электрододержателя, который содержит корпус с расположенными на нем органами управления, дистальный конец электрододержателя имеет гнездо для крепления рабочего инструмента, а проксимальный конец содержит разъемы для подключения к генератору мощности, пневмомагистрали распылительной камеры и блоку управления, в полости корпуса коаксиально его продольной оси размещен нагреватель воздушно-капельной смеси, внутри которого расположен канал подачи воздушно-капельной смеси, вход которого соединен с пневмомагистралью распылительной камеры, а выход расположен на торцевой поверхности дистального конца электрододержателя, согласно настоящему изобретению, во внутренней полости дистальной части корпуса электрододержателя коаксиально относительно его продольной оси и гнезда для крепления рабочего инструмента выполнена воздушная камера, в которой смонтирован термодатчик для определения температуры рабочего инструмента. Термодатчик своими выводами подключен к четвертому и пятому входам блока управления.
Согласно изобретению, передняя стенка воздушной камеры расположена от торцевого входного отверстия гнезда для крепления рабочего инструмента на расстоянии 0,3-0,4 длины гнезда, а задняя стенка камеры - на расстоянии 0,6-0,7 длины гнезда. Диаметр воздушной камеры составляет от 2,2-х до 3,2-х диаметра гнезда для крепления рабочего инструмента.
Согласно настоящему изобретению, термодатчик выполнен с центральным отверстием, диаметр которого составляет 1,01-1,015 диаметра гнезда для крепления рабочего инструмента, и при этом термодатчик закреплен в воздушной камере с зазором относительно стенок камеры.
Технический результат настоящего изобретения заключается в том, что в патентуемом электрохирургическом аппарате обеспечен контроль температуры рабочего инструмента, по которой косвенно расчетным путем оценивается состояние температуры биологического объекта в области воздействия и выбирается оптимальный температурный режим электрохирургического воздействия (мощность) на биологические ткани в зоне операции. Постоянный контроль температуры биологического объекта в зоне электрохирургического воздействия обеспечивает возможность сокращения области некроза и уменьшения опасности перфорации тонкостенных сосудов пациента, позволяет уменьшить нагарообразование на поверхности рабочего инструмента.
Сущность изобретения поясняется примером конкретной реализации патентуемого электрохирургического аппарата и чертежами, на которых приведены:
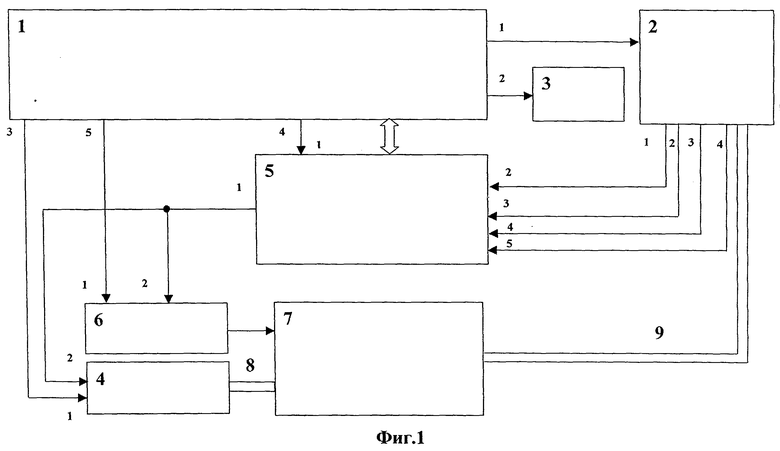
фиг.1 - блок-схема электрохирургического аппарата;
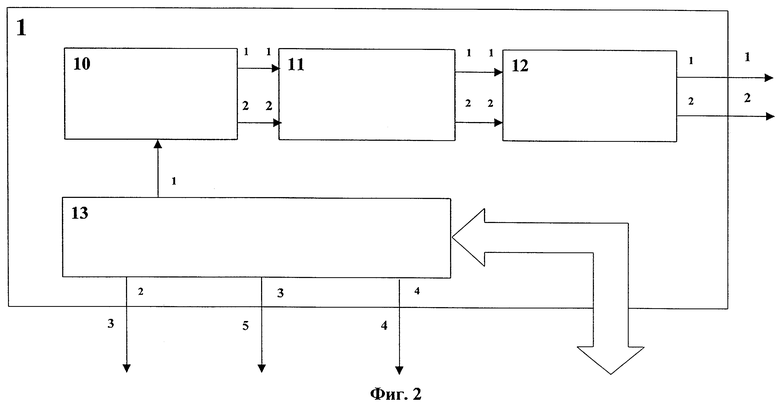
фиг.2 - блок-схема генератора мощности 1;
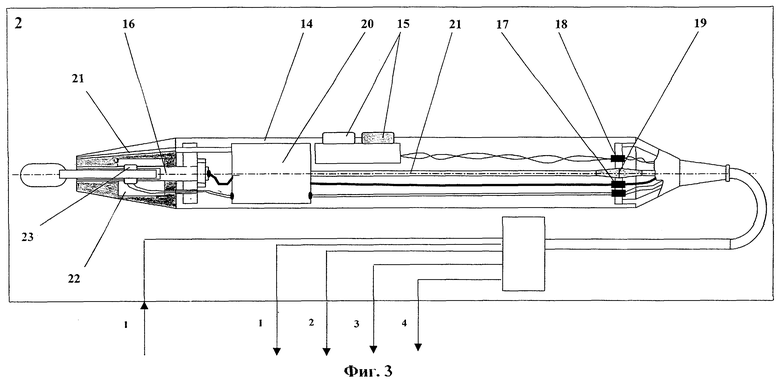
фиг.3 - блок-схема электрододержателя 2;
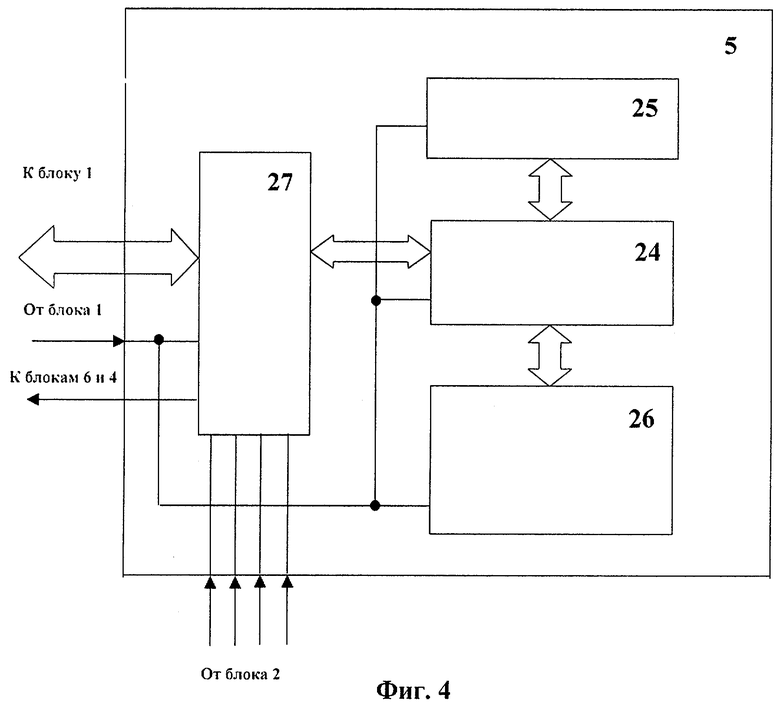
фиг.4 - блок-схема блока управления 5;
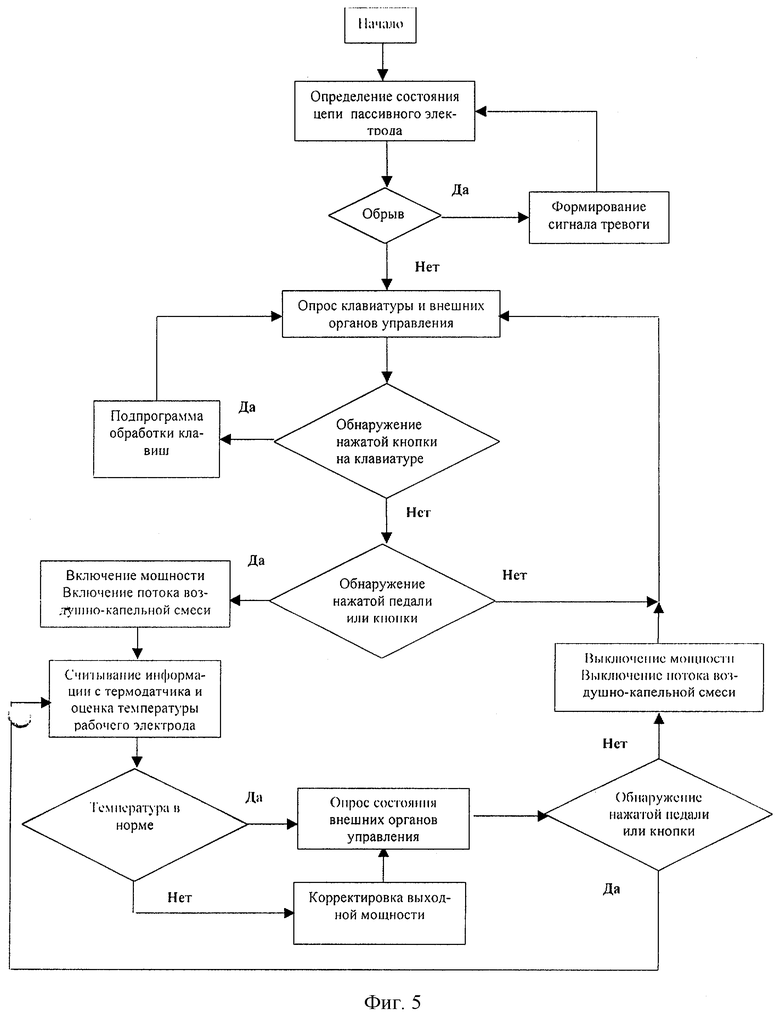
фиг.3 - укрупненная блок-схема алгоритма работы аппарата;
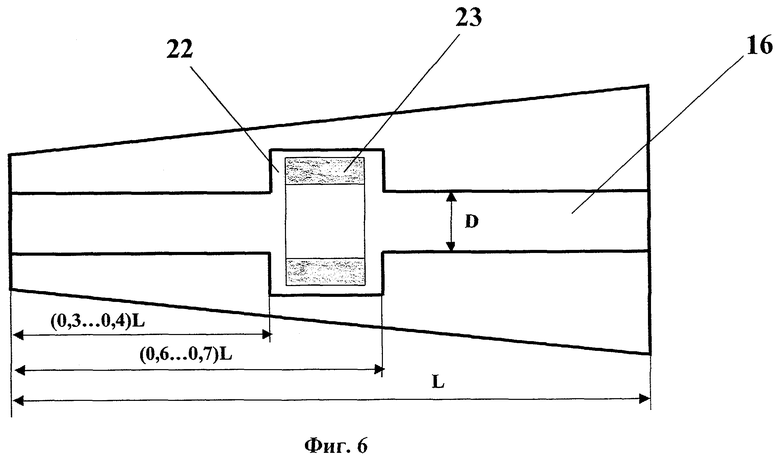
фиг.6 - схематическое изображение дистальной части электрододержателя и размеров воздушной камеры.
Электрохирургический аппарат (фиг.1) содержит генератор мощности 1, электрододержатель 2, пассивный электрод 3, компрессор 4, блок управления 5, ультразвуковой генератор 6, распылительную камеру 7, которая соединена пневмомагистралью 8 с пневматическим входом компрессора 4, а пневмо-магистралью 9 с пневматическим входом электрододержателя 2. Генератор мощности 1 своим первым выходом соединен с входом электрододержателя 2, вторым выходом - с пассивным электродом 3, третьим выходом - с первым входом компрессора 4, четвертым выходом - с первым входом блока управления 5, пятым выходом - с первым входом ультразвукового генератора 6. Блок управления 5 двунаправленной многоразрядной шиной соединен с генератором мощности 1, второй и третий входы блока управления подключены соответственно к первому и второму выходам электрододержателя 2, а выход - ко вторым входам компрессора 2 и ультразвукового генератора 6.
Генератор мощности 1 предназначен для формирования высокочастотного напряжения, используемого для рассечения или коагуляции ткани, и может быть выполнен по схеме, приведенной на фиг.2.
Электрододержатель 2 обеспечивает нагрев и подачу воздушно-капельной смеси в зону электрохирургического воздействия, контроль температуры рабочего инструмента, управление включением/выключением высокочастотной мощности и потока воздушно-капельной смеси. Конструктивно электрододержатель может быть выполнен, как указано на фиг.3 и 6.
Пассивный электрод 3 представляет собой пластину из токопроводящей резины с разъемом для подключения кабеля и обеспечивает плотный контакт с телом пациента. Конструктивно может быть реализован аналогично пассивному электроду тА 6.569.021 (см. техническую документацию на аппарат Политом-3 МСПМ. 941611.001).
Компрессор 4 необходим для создания избыточного давления в распылительной камере 7 и пневмомагистрали 9 и может быть выполнен по известной схеме (см. техническую документацию на ингалятор переносной ИП-211 П ТУ 92-0482101.036-96).
Блок управления 5 предназначен для задания всех управляющих сигналов, индикации уровня выходной мощности и режимов работы.
Блок управления 5 представляет собой электронную схему (фиг.4), выполненную на базе однокристального микроконтроллера и может быть реализован аналогично блоку управления серийно выпускаемого электрохирургического аппарата Политом-3 (см. техническую документацию на аппарат Политом-3 МСПМ. 941611.001).
Ультразвуковой генератор 6 предназначен для формирования сигнала возбуждения, поступающего в распылительную камеру 7, и может быть реализован аналогично генератору ультразвукового ингалятора "Ореол" (см. техническую документацию на ингалятор ультразвуковой индивидуальный "Ореол" ВКНЖ. 941582.001 ТУ).
Распылительная камера 7 обеспечивает создание воздушно-капельной смеси (аэрозоля) и представляет собой емкость, в дно которой встроен ультразвуковой излучатель, верхняя крышка съемная, а в боковые стенки встроены разъемы для подключения пневмомагистралей 8 и 9. Конструктивно может быть реализован аналогично распылительной камере ультразвукового ингалятора "Ореол" (см. техническую документацию на ингалятор ультразвуковой индивидуальный "Ореол" ВКНЖ. 941582.001 ТУ).
Пневмомагистраль 8 обеспечивает подачу воздуха в распылительную камеру 7 для создания в ней избыточного давления и представляет собой тонкостенную пластиковую трубку.
Пневмомагистраль 9 обеспечивает подачу воздушно-капельной смеси в электрододержатель 2 и представляет собой тонкостенную пластиковую трубку.
Генератор мощности 1 содержит (фиг.2) задающий генератор 10, первый и второй выходы которого подключены соответственно к первому и второму входам усилителя мощности 11, который своими первым и вторым выходами подключен к первому и второму входам выходной цепи 12, выходы которой соединены соответственно с электрододержателем 2 и пассивным электродом 3. Вход задающего генератора 10 подключен к выходу блока питания 13, который двунаправленной многоразрядной шиной связан с блоком управления 5 и своими выходами подключен соответственно к первому входу компрессора 4, первому входу блока управления 5 и первому входу ультразвукового генератора 6.
Задающий генератор 10 предназначен для получения двух противофазных напряжений 440 кГц для возбуждения усилителя мощности 11. Он состоит из генератора частоты 1760 кГц, выполненного на микросхеме типа К555ЛАЗ и делителя частоты на 4, выполненного на микросхеме типа К555ТМ2. В качестве варианта схемы задающего генератора может использоваться схема задающего генератора, представленная в патенте РФ №2008830, А 61 В 17/39.
Усилитель мощности 11 предназначен для получения высокочастотного напряжения заданной формы и амплитуды. По схемотехнике усилитель 11 представляет собой ключевой генератор, выполненный на базе полевых транзисторов типа IRF840. В качестве варианта исполнения усилителя мощности может использоваться схема усилителя мощности, приведенная в патенте РФ №2008830.
Выходная цепь 12 предназначена для согласования выходных цепей генератора мощности и нагрузки и представляет собой, например, повышающий выходной трансформатор и разделительные емкости, обеспечивающие необходимое согласование и электрическую развязку электрододержателя 2 и пассивного 3 электрода от цепей устройства. В качестве варианта исполнения выходной цепи может использоваться схема, приведенная в патенте РФ №2008830.
Блок питания 13 предназначен для формирования из переменного напряжения 220 В постоянного напряжения требуемых номиналов. Блок питания 13 может быть выполнен на базе серийно выпускаемых импульсных высокочастотных преобразователей (см. Источники питания для электронной аппаратуры. Каталог ММП-ИРБИС, Изд. "ВаланГ", М., 1996 г.) по схеме, приведенной в технической документации на серийно выпускаемый электрохирургический аппарат Политом-3 (см. техническую документацию на аппарат Политом-3 МСПМ. 941611.001).
Электрододержатель 2 (фиг.3) содержит корпус 14 с расположенными на нем органами управления 15, гнездо для крепления рабочего инструмента 16, разъем 17 для подключения к генератору мощности 1, разъем 18 для подключения к блоку управления 5, разъем 19 для подключения пневмомагистрали 9 к распылительной камере 7, нагреватель воздушно-капельной смеси 20, канал 21 для подачи воздушно-капельной смеси в зону хирургического воздействия.
Органы управления 15 представляют собой механические коммутационные элементы, соединенные через разъем 18 с блоком управления 5, и обеспечивают включение/выключение мощности и подачи воздушно-капельной смеси. В качестве коммутационных элементов могут использоваться переключатели типа ПкН 159 АУБК 642.130.004 ТУ.
Нагреватель воздушно-капельной смеси 20, подключенный через разъем 17 к генератору мощности, служит для нагрева потока воздушно-капельной смеси в целях уменьшения конденсата в области хирургического воздействия и может быть выполнен в виде спирали из высокоомного металлического сплава с коаксиально расположенной металлической трубкой для подвода нагреваемого потока воздушно-капельной смеси. Конструктивно может быть реализован аналогично нагревателю тА 5.863.059 (см. техническую документацию на ингалятор переносной ИП-211 П ТУ 92-0482101.036-96).
Во внутренней полости корпуса 14 электрододержателя 2 в его дистальной части коаксиально продольной оси электрододержателя и гнезда для крепления рабочего инструмента 16 выполнена воздушная камера 22, в которой смонтирован термодатчик 23 для определения температуры рабочего инструмента.
Воздушная камера 22 служит для размещения в ней термодатчика 23 и температурной изоляции термодатчика от корпуса электрододержателя. Датчик 23 монтируют в камере 22, например, с помощью штифтов (не показаны), с зазором относительно всех стенок камеры, что обеспечивает температурную “развязку” термодатчика 23 от корпуса электрододержателя. Таким образом, до минимума снижаются температурные влияния корпуса электрододержателя на показания термодатчика 23. Во время электрохирургического воздействия температура дистальной части корпуса электрододержателя может достигать нескольких десятков градусов Цельсия.
Передняя стенка воздушной камеры 22 расположена от торцевого входного отверстия гнезда для крепления рабочего инструмента 16 на расстоянии 0,3-0,4 длины гнезда, задняя стенка на расстоянии 0,6-0,7 длины гнезда, а диаметр камеры 22 составляет 2,2-3,2 диаметра гнезда 16. При этом термодатчик 23 выполнен с центральным отверстием, диаметр которого составляет 1,01-1,015 диаметра гнезда для крепления рабочего инструмента и смонтирован в воздушно-изоляционной камере с зазором относительно стенок камеры.
В электрохирургических аппаратах используют различные по конструктивной реализации рабочие инструменты. Инструменты имеют форму “иглы”, “шпателя”, “ножа” и др. Они изготавливаются из термобезинерционных материалов, т.е. имеют свойства быстро нагреваться и остывать. Эта особенность инструментов позволяет в реальном масштабе времени оценивать его температуру. Установленные заявителем конструктивные размеры воздушной камеры и оптимальная зона расположения камеры 22 в дистальной части электрододержателя с размещенным в ней термодатчиком 23 позволяет более точно фиксировать температуру рабочего инструмента, ввести в алгоритм расчета температуры константу, определяющую градиент нагрева инструмента от точки контакта с тканью до места расположения термодатчика, а также ввести поправку на материал и конструкцию рабочего инструмента.
В качестве термодатчика 23 могут быть использованы, например, датчики типа КГУ 81-110 или ASUS P2T-Cable. Термодатчик 23 своими выводами подключен к четвертому и пятому входам блока управления 5.
Блок управления 5 (фиг.4) включает формирователь управляющих сигналов 24, блок индикации и клавиатуры управления 25, постоянное запоминающее устройство (ПЗУ) 26 и устройство ввода-вывода 27. Формирователь управляющих сигналов 24 предназначен для управления блоком индикации и клавиатуры управления 25, для формирования управляющих сигналов, идущих через устройство ввода-вывода 27 на генератор мощности 1, компрессор 4, ультразвуковой генератор 6, и обменом данными с ПЗУ 26. Работа блока 5 осуществляется по программе, разработанной заявителем для настоящего аппарата. Укрупненная блок-схема алгоритма работы аппарата приведена на фиг.5. Подробная информация о программном обеспечении работы электрохирургического аппарата содержится в технической документации заявителя.
Формирователь управляющих сигналов 24 может быть реализован на базе однокристальной микроЭВМ КР1830ВЕ51 (Боборыкин А.В., Липовецкий Г.П., Литвинский Г.В. и др. Однокристальные микроЭВМ, М., МИКАП, 1994 г., с.107-234. Бродин В.Б., Шагурин И.И. Микроконтроллеры. Архитектура, программирование, интерфейс. - М., Изд. ЭКОМ, 1999 г., с.151-237).
Блок индикации и клавиатуры управления 25 предназначен для ввода управляющих сигналов, индикации режимов работы и индикации уровня выходной мощности аппарата. Блок индикации и клавиатуры управления 25 может быть выполнен на индикаторах HDSP-5621G и АЛ307 или других аналогичных элементах (см. техническую документацию на аппарат Политом-3 МСПМ.941611.001).
Постоянное запоминающее устройство (ПЗУ) 26 обеспечивает выполнение заданной программы работы аппарата (фиг.5) и может быть выполнено на базе микросхемы типа 573РФ6 или других аналогичных типов (см. техническую документацию на аппарат Политом-3 МСПМ.941611.001).
Устройство ввода-вывода управляющих сигналов 27 предназначено для ввода-вывода управляющих сигналов и их электрического согласования с последующими цепями аппарата. Может быть выполнено на базе микросхемы КР580ВВ55 или других аналогичных типов (см. техническую документацию на аппарат Политом-3 МСПМ.941611.001).
Аппарат электрохирургический работает следующим образом. Перед началом работы пассивный электрод 3 накладывают на тело пациента как можно ближе к зоне хирургического вмешательства. При включении устройства в сеть на выходах блока питания 13 формируются все необходимые напряжения.
Для включения тока на выходе аппарата врач устанавливает с помощью блока управления 5 требуемые параметры выходного воздействия и с помощью внешних органов управления аппаратом (на схеме не приведены, а представляют собой педаль или кнопку) включает ток. При этом начинает работать задающий генератор 10, формирующий противофазные сигналы возбуждения частотой 440 кГц, которые поступают далее на вход усилителя мощности 11. Одновременно блок управления 5 формирует управляющий сигнал с широтно-импульсной модуляцией. Этот сигнал задает уровень выходного напряжения блока питания 13, используемого для питания усилителя мощности 11.
В усилителе мощности 11 сигнал возбуждения усиливается двухтактным усилителем на биполярных транзисторах и выделяется на вторичных обмотках трансформатора. Амплитуда возбуждения на затворах полевых транзисторов составляет 20-25 В, что достаточно для насыщения этих транзисторов и работы усилителя мощности 11 в ключевом режиме.
С выхода усилителя мощности 11 высокочастотный амплитудно-модулированный ток проходит через выходную цепь 12, электрододержатель 2 с установленным в нем активным электродом и далее через тело пациента к пассивному электроду 3.
Активный электрод, установленный в электрододержателе, имеет малую площадь соприкосновения с телом пациента, благодаря чему в зоне контакта обеспечивается максимальная плотность тока и, как следствие, максимальный тепловой нагрев ткани, обеспечивающий рассечение или коагуляцию мягких тканей пациента.
Хирург, проводя ЭХВ-воздействие, касается рабочим инструментом тела пациента, при этом через рабочий инструмент, установленный в гнездо 16, течет высокочастотный ток, который нагревает область контакта рабочего инструмента с телом пациента, обеспечивая электрохирургическое воздействие - резание или коагуляцию. Одновременно с этим происходит и нагрев самого рабочего инструмента. Термодатчик 23, размещенный в воздушной камере 22, реагирует на температуру рабочего инструмента. Потенциал, возникающий в термодатчике 23, передается в блок-схему 5 управления аппарата, которая в зависимости от измеренной температуры автоматически изменяет уровень мощности, подводимой к рабочему инструменту. Такая организация работы аппарата обеспечивает постоянный контроль теплового режима электрохирургического воздействия и исключает перегрев биологической ткани в зоне операции и перегрев самого рабочего инструмента.
Реализованная в патентуемом аппарате схема контроля и регулирования температуры биологической ткани в зоне электрохирургического воздействия и температуры рабочего инструмента позволяет оптимизировать электрохирургическое воздействие по основному физическому фактору - термонагреву биологической ткани и дает возможность в значительной мере освободить хирурга от необходимости постоянно контролировать уровень мощности, подводимой к зоне электрохирургического воздействия.
Испытания разработанного электрохирургического аппарата подтвердили улучшение ряда основных эксплуатационных характеристик:
- обеспечение патентуемым аппаратом постоянного теплового режима электрохирургического воздействия сокращает область некроза, существенно уменьшает опасность перфорации тонкостенных сосудов, что позволяет успешно использовать настоящий аппарат при сосудистых операциях;
- отмечается снижение нагарообразования на рабочем инструменте, что позволяет увеличить глубину достижимой коагуляции;
- автоматический контроль уровня мощности, подводимой к зоне электрохирургического воздействия, освобождает врача от необходимости постоянно отвлекаться от хода операции и контролировать данный параметр аппарата;
- проведенные испытания отмечают улучшение качества коагуляционной спайки, что несомненно сократит сроки реабилитации больных.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТ ЭЛЕКТРОХИРУРГИЧЕСКИЙ | 2000 |
|
RU2161932C1 |
| СПОСОБ ВЫСОКОЧАСТОТНОГО ЭЛЕКТРОХИРУРГИЧЕСКОГО ВОЗДЕЙСТВИЯ НА БИОЛОГИЧЕСКИЕ ТКАНИ | 2001 |
|
RU2195226C2 |
| АППАРАТ ЭЛЕКТРОХИРУРГИЧЕСКИЙ ВЫСОКОЧАСТОТНЫЙ | 2000 |
|
RU2166299C1 |
| АППАРАТ ЭЛЕКТРОХИРУРГИЧЕСКИЙ | 1999 |
|
RU2154437C1 |
| АППАРАТ ЭЛЕКТРОХИРУРГИЧЕСКИЙ ОСЦИЛЛЯЦИОННЫЙ | 2005 |
|
RU2294712C1 |
| АППАРАТ ДЛЯ ХОЛОДНО-ПЛАЗМЕННОЙ ВЫСОКОЧАСТОТНОЙ ЭЛЕКТРОХИРУРГИИ | 2003 |
|
RU2254093C2 |
| АППАРАТ ЭЛЕКТРОХИРУРГИЧЕСКИЙ ВЫСОКОЧАСТОТНЫЙ | 2002 |
|
RU2221516C1 |
| АППАРАТ ДЛЯ ХОЛОДНО-ПЛАЗМЕННОЙ ВЫСОКОЧАСТОТНОЙ ЭЛЕКТРОХИРУРГИИ | 2003 |
|
RU2241406C1 |
| ЭЛЕКТРОХИРУРГИЧЕСКОЕ УСТРОЙСТВО | 1999 |
|
RU2145818C1 |
| ЭЛЕКТРОХИРУРГИЧЕСКИЙ АППАРАТ И ЭЛЕКТРОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2010 |
|
RU2532364C2 |
Изобретение относится к медицинской технике, а именно к высокочастотной электрохирургической аппаратуре, и может быть использовано в хирургии для рассечения и коагуляции мягких тканей организма. Электрохирургический аппарат содержит генератор мощности, электрододержатель, пассивный электрод, компрессор 4, блок управления, ультразвуковой генератор, распылительную камеру, магистрали. Электрододержатель содержит корпус с органами управления, гнездо для крепления рабочего инструмента, разъемы, нагреватель воздушно-капельной смеси и канал для подачи воздушно-капельной смеси в зону хирургического воздействия. Во внутренней полости корпуса электрододержателя в его дистальной части коаксиально продольной оси электрододержателя и гнезда для крепления рабочего инструмента выполнена воздушная камера, в которой смонтирован термодатчик для определения температуры рабочего инструмента. Контроль температуры рабочего инструмента, по которой косвенно расчетным путем оценивается состояние температуры биологического объекта в области воздействия и выбирается оптимальный температурный режим электрохирургического воздействия на биологические ткани в зоне операции, позволяет повысить качество коагуляции и снизить нагарообразование на рабочем инструменте. 6 ил.
Аппарат электрохирургический, содержащий генератор мощности, первый выход которого соединен с входом электрододержателя, второй выход - с пассивным электродом, третий выход - с первым входом компрессора, четвертый выход - с первым входом блока управления, второй и третий входы которого подключены соответственно к первому и второму выходу электрододержателя, блок управления двунаправленной многоразрядной шиной соединен с генератором мощности, а своим выходом подключен ко второму входу компрессора, первый вход ультразвукового генератора подключен к пятому выходу генератора мощности, второй вход - к выходу блока управления, а выход соединен с распылительной камерой, которая соединена пневмомагистралью с пневматическим выходом компрессора, а другой пневмомагистралью с пневматическим входом электрододержателя, который содержит корпус с расположенными на нем органами управления, дистальный конец электрододержателя имеет гнездо для крепления рабочего инструмента, а проксимальный конец содержит разъемы для подключения к генератору мощности, пневмомагистрали распылительной камеры и блоку управления, в полости корпуса коаксиально оси электрододержателя размещен нагреватель воздушно-капельной смеси, внутри которого расположен канал подачи воздушно-капельной смеси, вход которого соединен с пневмомагистралью распылительной камеры, а выход расположен на торцевой поверхности дистального конца электрододержателя, отличающийся тем, что во внутренней полости дистальной части корпуса электрододержателя коаксиально относительно продольной оси электрододержателя и гнезда для крепления рабочего инструмента выполнена воздушная камера, в которой смонтирован термодатчик для определения температуры рабочего инструмента, своими выводами подключенный к пятому и шестому входам блока управления, передняя стенка воздушной камеры расположена от торцевого входного отверстия гнезда для крепления рабочего инструмента на расстоянии 0,3-0,4 длины гнезда, задняя стенка на расстоянии 0,6-0,7 длины гнезда для крепления рабочего инструмента, а диаметр камеры составляет 2,2-3,2 диаметра гнезда, при этом термодатчик выполнен с центральным отверстием, диаметр которого составляет 1,01-1,015 диаметра гнезда для крепления рабочего инструмента и смонтирован в воздушно-изоляционной камере с зазором относительно стенок камеры.
| АППАРАТ ЭЛЕКТРОХИРУРГИЧЕСКИЙ | 2000 |
|
RU2161932C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ВЫСОКОЧАСТОТНОГО ЭЛЕКТРОХИРУРГИЧЕСКОГО ВОЗДЕЙСТВИЯ НА БИОЛОГИЧЕСКИЕ ТКАНИ | 2001 |
|
RU2195226C2 |

