Предлагаемое изобретение относится к области приборостроения, а именно, к технике измерения уровня безнапорных потоков электромагнитным методом, к технике поверки электромагнитных расходомеров-уровнемеров и уровнемеров.
Такие приборы далее будем называть сокращенно ЭМУ (электромагнитные уровнемеры), поскольку данное изобретение решает вопрос поверки приборов только по уровню, не касаясь поверки некоторых из этих приборов по расходу.
В ЭМУ используется электромагнитный метод измерения, основанный на законе Фарадея [1, 2]. ЭМУ имеет участок трубопровода, выполненный из немагнитного и неэлектропроводного материала, в котором расположены по крайней мере два электрода, контактирующие с измеряемой средой. На трубопроводе имеется индуктор, состоящий из двух катушек возбуждения и магнитопровода. Рабочее положение ЭМУ на трубопроводе всегда горизонтальное, т.е. такое, при котором ось канала и линии, соединяющие пары измерительных электродов, расположены в горизонтальной плоскости или с небольшим наклоном к горизонтальной поверхности. Одна из катушек индуктора расположена над трубопроводом, верхняя, а другая расположена под трубопроводом, нижняя. Каждая из катушек питается током от общего или от индивидуального (своего) источника питания. Во всех случаях при измерении уровня магнитное поле в канале ЭМУ, создаваемое каждой из катушек индуктора в отдельности, направлено навстречу друг другу. Магнитное поле в канале, созданное токами в катушках возбуждения, преобразуется движущимся потоком жидкости в электрический сигнал между двумя электродами. При измерении уровня заполнения канала в ЭМУ токи возбуждения в катушках либо одинаковы, либо подбираются такой величины, при которой сигналы на электродах, образованные магнитным полем каждой из катушек в отдельности, становятся одинаковыми и противоположными по полярности.
Чувствительность ЭМУ к изменению уровня зависит от скорости потока. При безнапорном течении жидкости по трубопроводу, с изменением расхода почти пропорционально ему изменяется “живое” сечение и мало изменяется его средняя скорость, поэтому практически во всем диапазоне изменения уровня чувствительность прибора остается приблизительно постоянной.
Известен способ поверки электромагнитных расходомеров на основе имитационного моделирования [3], являющийся наиболее близким аналогом предлагаемого способа поверки ЭМУ. Известный способ предусматривает выполнение двух метрологических операций.
Первая операция состоит в определении коэффициента преобразования первичного преобразователя. Коэффициент преобразования первичного преобразователя представляет собой отношение выходного сигнала первичного преобразователя к его входному сигналу. В качестве выходного сигнала в известном способе рассматривается отношение напряжения на электродах к току питания индуктора, а входным сигналом - расход или скорость потока, т.е.

где Kq - коэффициент преобразования первичного преобразователя по расходу Q, Кv - коэффициент преобразования первичного преобразователя по скорости V, U - напряжение между электродами, I - ток питания индуктора.
Определение коэффициентов Kq и Kv осуществляется с помощью плоской индукционной катушки (Сенсора), размещаемой в канале прибора, в плоскости, совпадающей с плоскостью, проходящей через ось канала и линию, соединяющую электроды. Витки Сенсора распределены по линиям равного значения поверхностной весовой функции.
Поверхностная весовая функция соответствует полному заполнению канала прибора измеряемой жидкостью. Сигнал (Ui), индуцируемый в Сенсоре магнитным полем возбуждения первичного преобразователя, интегрируется и, затем, сравнивается с напряжением (Ur), выделяемом на сопротивлении r, включенном в цепь питания индуктора. Напряжение Ur пропорционально току питания индуктора. По отношению

вычисляют коэффициент преобразования первичного преобразователя по формуле:

где Ci - постоянная времени интегрирования сигнала Сенсора [с]; Сk - характеристика индукционной катушки (Сенсора), иногда ее называют “постоянная Сенсора”. Сk характеризуется суммарной площадью витков Сенсора, [м2]; D - диаметр канала первичного преобразователя [м].
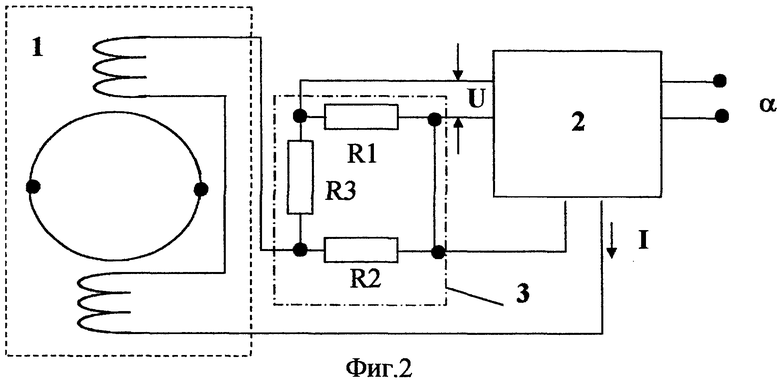
На фиг.1 приводится схема, используемая при выполнении первой метрологической операции, и поясняется способ определения коэффициентов преобразования Кq и Kv. На фиг.1 приняты следующие обозначения: 1 и 2 - две катушки возбуждения магнитного поля (соответственно верхняя 1 и нижняя 2), 3 - электроды, 4 - плоская индукционная катушка (Сенсор), которая подключена к интегрирующему преобразователю 5, 6 - измеритель отношения напряжений, 7 - источник питания катушек возбуждения. В цепь питания катушки возбуждения включено электрическое сопротивление. Выходное напряжение с интегрирующего преобразователя 5 и напряжение, выделяемое на сопротивлении r, подведены к измерителю отношения напряжений 6.
Вторая метрологическая операция состоит в воспроизведении имитационным методом выходной величины первичного преобразователя  , возбуждаемого движением потока
, возбуждаемого движением потока
жидкости. Для этого в цепь питания индуктора включают сопротивление r0, величина которого равна величине KqQ или KvV. На этом сопротивлении выделится напряжение, равное сигналу между электродами U при протекании по каналу расхода Q или потока со скоростью V, это напряжение подается на вход измерительного устройства расходомера и производят сличение показаний расходомера α с заданным значением объемного расхода Q или скорости потока V. Таким образом величина сопротивления r0 служит мерой расхода или скорости потока.

Подбором определенной величины сопротивления r0 производится имитация сигнала первичного преобразователя, соответствующего при протекании по каналу различного значения расхода Q или потока с различным значением скорости V.
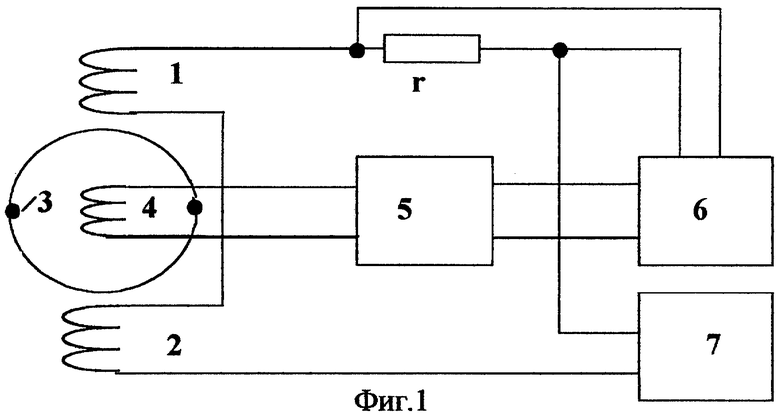
Как правило, сопротивление r0 оказывается чрезвычайно низкоомным, может составлять несколько мОм; как известно, с такими сопротивлениями сложно работать, поэтому целесообразно применять делитель из сопротивлений (калибратор), один из вариантов схемы которого приведен на фиг.2. В схеме, приведенной на фиг.2, приняты следующие обозначения: 1 - первичный преобразователь расхода, 2 - измерительное устройство расходомера, R1, R2, R3 - сопротивления делителя (калибратора) 3, I - ток питания индуктора, U - напряжение, подводимое на вход измерительного устройства, α - выходной сигнал измерительного устройства. Эквивалентное сопротивление r0 калибратора при этом равно

Подбором сопротивлений R1, R2, R3 имитатора, например, даже одного из них, можно получить значение r0 такой величины, которая имитирует величину расхода Q или скорости V, вычисленные по формуле (6).
Недостатком рассмотренного способа является то, что этот способ позволяет производить поверку только электромагнитных расходомеров и электромагнитных преобразователей скорости, у которых канал полностью заполнен потоком жидкости, т.е. приборов, предназначенных для измерения напорных потоков. Этот способ не позволяет производить поверку ЭМУ.
Известен имитационный способ [4] поверки ЭМУ в безнапорных трубопроводах. В нем совмещены упомянутые обе метрологические операции в одну. Суть этого известного способа состоит в следующем. Плоская индукционная катушка (Сенсор) размещается в канале первичного преобразователя, сигнал, наведенный в ней магнитным полем возбуждения, интегрируется и далее с помощью регулируемого преобразователя на сопротивлениях (калибратора) преобразуется в сигнал, эквивалентный сигналу между электродами, возбуждаемому в канале ЭМУ потоком жидкости. Для имитации различных положений уровня потока жидкости применяют набор Сенсоров, отличающихся друг от друга геометрическими размерами и распределением витков, т.к. поверхностные весовые функции имеют разный вид для разных уровней заполнения канала измеряемой средой. Каждый Сенсор имитирует соответствующий уровень заполнения канала и располагается в соответствующей плоскости, которая делит “живое” сечение потока заданного уровня на две равные части. Недостатком этого способа является сложность поверки ЭМУ, вызванная необходимостью иметь набор Сенсоров для имитации различных уровней заполнения канала измеряемой средой.
Этот недостаток устраняется в предлагаемом изобретении.
Цель предлагаемого изобретения - упрощение устройства и процедуры поверки ЭМУ, а также повышение точности поверки.
Способ поверки ЭМУ выполняется с помощью двух метрологических операций.
Первая метрологическая операция состоит в определении коэффициентов Кv первичного преобразователя таким же образом, как это делается в [3], но при двух различных распределениях магнитного поля возбуждения, создаваемых каждой в отдельности катушкой индуктора. Коэффициент преобразования Kv1 определяется при питании током только нижней катушки индуктора, а коэффициент Кv2 соответственно при питании током только верхней катушки возбуждения. Коэффициенты преобразования Kv1 и Kv2 соответствуют полному заполнению канала измеряемой средой. Поскольку нижняя и верхняя катушки выполнены одинаковыми, то соответствующие им коэффициенты преобразования приблизительно равны друг другу.
Вторая метрологическая операция состоит в воспроизведении сигнала первичного преобразователя, вызванного безнапорным потоком в ЭМУ.
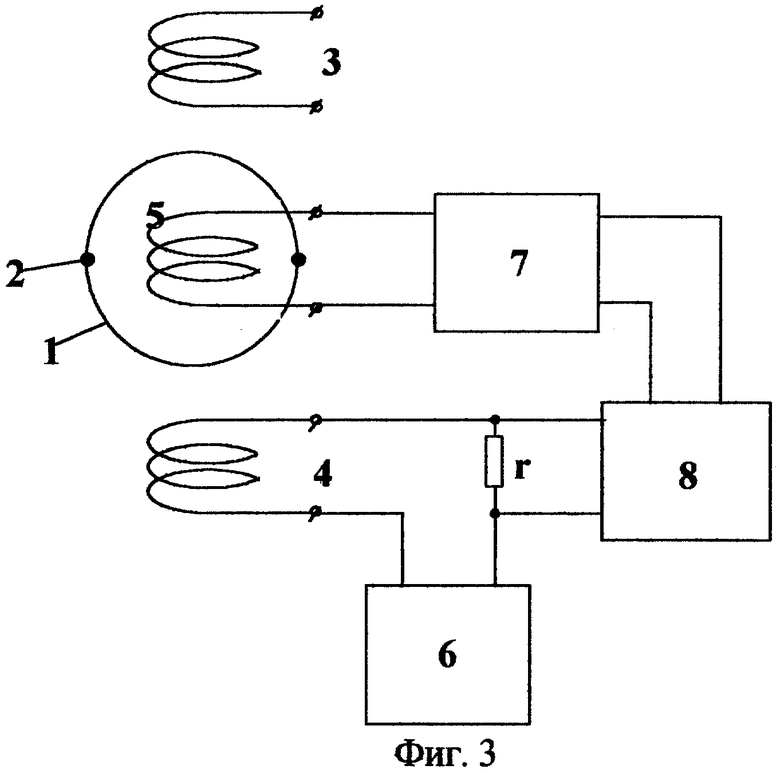
На фиг.3 и 4 приводятся схемы, используемые при выполнении первой метрологической операции, и поясняется способ определения коэффициентов преобразования Kv1 и Kv2. На фиг.3 и фиг.4 изображен первичный преобразователь ЭМУ, состоящий из участка трубопровода 1, двух электродов 2, двух катушек возбуждения магнитного поля 3 и 4, индивидуального источника питания 6. Причем на фиг.3 источник питания 6 подключен к нижней катушке, а на фиг.4 он подключен к верхней катушке. В канале первичного преобразователя установлена плоская индукционная катушка (Сенсор) 5, которая подключена к интегрирующему преобразователю 7. Сенсор представляет собой плоскую индукционную катушку, витки которой распределены по линиям равного значения поверхностной весовой функции, соответствующей полному заполнению канала измеряемой жидкостью. Иными словами применяется Сенсор, по конструкции соответствующий [3]. Сенсор размещается в канале прибора, в плоскости, совпадающей с плоскостью, проходящей через ось канала и линию, соединяющую электроды. В цепь питания катушки возбуждения включено электрическое сопротивление r, напряжение с интегрирующего преобразователя 7 и с сопротивления r подведены к измерителю отношения напряжений 8. При подключении каждой катушки возбуждения к источнику питания 6 в канале первичного преобразователя возникает переменное магнитное поле,
которое наводит в плоской индукционной катушке (Сенсоре) электрический сигнал. Этот сигнал интегрируется при помощи интегрирующего преобразователя 7 и подводится к измерителю 8. Измеритель 8 определяет отношение двух напряжений по формуле (3).
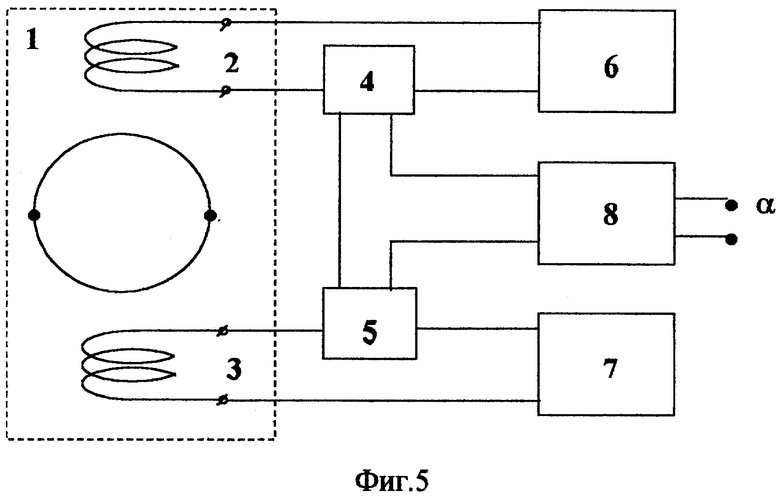
Для имитации сигнала, эквивалентного движению безнапорного потока в канале ЭМУ, собирают схему, приведенную на фиг.5.
На фиг.5 обозначены 1 - участок трубопровода с электродами первичного преобразователя, 2 и 3 - катушки возбуждения магнитного поля первичного преобразователя, 4 и 5 - калибраторы, включенные в цепи питания катушек возбуждения, 6 и 7 - источники питания катушек возбуждения, 8 - измерительное устройство ЭМУ, α - выходной сигнал ЭМУ. Коэффициенты преобразования калибраторов K1 и К2 устанавливаются равными, вычисленными по формулам:

где K1 - коэффициент преобразования калибратора, включенного в цепь питания нижней катушки возбуждения магнитного поля; К2 - коэффициент преобразования калибратора, включенного в цепь питания верхней катушки возбуждения магнитного поля; f(λ) - функция, характеризующая зависимость изменения коэффициентов преобразования первичного преобразователя от изменения уровня заполнения канала, которая может быть представлена, например, в виде степенного ряда вида: f(λ)=a·λ+b·λ2+с·λ3, где а, b, с - эмпирические коэффициенты, определяемые экспериментальным методом при разработке ЭМУ; λ - критерий геометрического подобия, характеризующий степень заполнения канала жидкостью, равный:

где Sв - часть площади поперечного сечения канала, в которой отсутствует жидкость; Sk - полная площадь поперечного сечения канала.
Поверка ЭМУ производится следующим образом.
Сначала выполняют первую метрологическую операцию, состоящую в определении коэффициентов преобразования первичного преобразователя Kv1 и Кv2. Для этого измеряют внутренний диаметр D поверяемого прибора. Затем устанавливают Сенсор в канале ЭМУ таким образом, чтобы Сенсор размещался в канале прибора в плоскости, совпадающей с плоскостью, проходящей через ось канала и линию, соединяющую электроды. В любой очередности собирают схемы, изображенные на фиг.3 и 4, и измеряют коэффициенты k при питании током поочередно каждой из катушек индуктора. Затем по формуле (5) вычисляют коэффициенты преобразования первичного преобразователя Kv1 и Kv2.
Далее приступают ко второй метрологической операции, состоящей в воспроизведении сигнала первичного преобразователя, вызванного безнапорным потоком в ЭМУ. Для этого задают значения величины λ и скорости потока V. Соответственно им вычисляют значения коэффициентов преобразования K1 и К2 по формулам (8) и (9) и устанавливают сопротивления R1, R2, R3 калибраторов, соответственно значениям K1 и К2. При этом на входе измерительного устройства образуется сигнал, равный сигналу между электродами при безнапорном потоке с заданными параметрами λ и V. Сравнивая выходной сигнал α с заданными значениями λ и скорости V, производят поверку ЭМУ на различных участках градуировочной характеристики прибора.
Таким образом, использование предложенного решения позволяет проводить поверку ЭМУ по уровню заполнения канала потоком измеряемой среды.
Источники информации
1. Патент США № 5369999, Non-fall state detecting apparatus and method, 1994.
2. Заявка на патент России № 2002125658/28 (027280). Электромагнитный способ измерения уровня. Положительное решение от 17.03.2003 г.
3. Патент России, № 2146042. Способ градуировки и поверки электромагнитных расходомеров, G 01 F 25/00, 1999 г., БИ № 6, 2000 г.
4. Патент России № 2193758, Способ градуировки и поверки электромагнитных расходомеров, G 01 F 25/00, 2000 г., БИ № 33, 2002 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГРАДУИРОВКИ И ПОВЕРКИ ЭЛЕТРОМАГНИТНЫХ РАСХОДОМЕРОВ | 2000 |
|
RU2193758C2 |
| СПОСОБ ГРАДУИРОВКИ И ПОВЕРКИ ЭЛЕКТРОМАГНИТНЫХ РАСХОДОМЕРОВ | 1999 |
|
RU2146042C1 |
| СПОСОБ ПОВЕРКИ ЭЛЕКТРОМАГНИТНЫХ РАСХОДОМЕРОВ | 2004 |
|
RU2270420C2 |
| СПОСОБ ПОВЕРКИ ЭЛЕКТРОМАГНИТНЫХ РАСХОДОМЕРОВ БЕЗ СЪЕМА С ТРУБОПРОВОДА | 2016 |
|
RU2619832C1 |
| СПОСОБ ПОВЕРКИ ЭЛЕКТРОМАГНИТНЫХ РАСХОДОМЕРОВ БЕЗ СЪЕМА С ТРУБОПРОВОДА | 2010 |
|
RU2432551C1 |
| СПОСОБ ГРАДУИРОВКИ И ПОВЕРКИ ЭЛЕКТРОМАГНИТНЫХ РАСХОДОМЕРОВ | 2005 |
|
RU2303767C2 |
| СПОСОБ ГРАДУИРОВКИ И ПОВЕРКИ ЭЛЕКТРОМАГНИТНЫХ РАСХОДОМЕРОВ | 2006 |
|
RU2330246C2 |
| СПОСОБ ПОВЕРКИ ЭЛЕКТРОМАГНИТНЫХ РАСХОДОМЕРОВ БЕЗ СЪЕМА С ТРУБОПРОВОДА | 2012 |
|
RU2494354C1 |
| ЭЛЕКТРОМАГНИТНЫЙ УРОВНЕМЕР | 2004 |
|
RU2284476C2 |
| СПОСОБ ГРАДУИРОВКИ И ПОВЕРКИ ЭЛЕКТРОМАГНИТНЫХ РАСХОДОМЕРОВ | 2005 |
|
RU2322651C2 |

Изобретение относится к области приборостроения, а именно к технике измерения уровня безнапорных потоков электромагнитным методом, к технике поверки электромагнитных расходомеров и уровнемеров. Сущность: в магнитном поле первичного преобразователя размещают плоскую индукционную катушку и интегрируют электрическое напряжение на ее выходных клеммах. Затем сравнивают проинтегрированный сигнал с индукционной катушки с напряжением, выделяемым на сопротивлении, включенном в цепь питания индуктора. Вычисляют коэффициент преобразования первичного преобразователя. С помощью калибратора, представляющего собой делитель на сопротивлениях, включенного в цепь питания индуктора, имитируют сигнал, индуцируемый потоком жидкости между электродами. Коэффициент преобразования калибратора устанавливается пропорциональным произведению скорости потока и коэффициента преобразования первичного преобразователя. Технический результат: изобретение расширяет функциональные возможности имитационного способа градуировки и поверки электромагнитных расходомеров-уровнемеров и уровнемеров. 5 ил.
Способ поверки электромагнитных расходомеров-уровнемеров по уровню заполнения канала измеряемой средой, заключающийся в выполнении двух метрологических операций: из которых первая состоит в определении коэффициента преобразования первичного преобразователя при питании индуктора током с помощью плоской индукционной катушки, помещаемой в канал первичного преобразователя в плоскость, проходящую через ось канала и линию, соединяющую электроды, интегрировании выходного сигнала индукционной катушки, сравнении проинтегрированного сигнала индукционной катушки с напряжением, выделяемым на сопротивлении, включенном в цепь питания индуктора, вычислении преобразования индуктора, вычислении коэффициента преобразования первичного преобразователя, а вторая операция состоит в имитации сигнала, индуцируемого потоком жидкости между электродами, с помощью калибратора, представляющего собой делитель на сопротивлениях, включенного в цепь питания индуктора, а коэффициент преобразования калибратора устанавливается пропорциональным произведению скорости потока и коэффициента преобразования первичного преобразователя, отличающийся тем, что первая метрологическая операция состоит в определении двух коэффициентов преобразования первичного преобразователя, соответственно при питании сначала одной, а затем другой катушки возбуждения индуктора, а вторая метрологическая операция выполняется с помощью двух калибраторов, из которых один включается в цепь питания нижней катушки возбуждения и его коэффициент преобразования устанавливается равным К1=Кp1V[1+f(λ)], а другой включается в цепь питания верхней катушки возбуждения и его коэффициент преобразования устанавливается равным К2=Кp2V[1-f(λ)], где Kp1, и Кp2 - коэффициенты преобразования первичного преобразователя при питании соответственно нижней и верхней катушек возбуждения, V - скорость потока, f(λ) - функция, определяющая зависимость коэффициентов преобразования Кp1, и Кp2 от критерия геометрического подобия, характеризующего степень заполнения канала жидкостью, причем  , где Sв - часть площади поперечного сечения канала, в которой отсутствует жидкость, Sk - полная площадь поперечного сечения канала.
, где Sв - часть площади поперечного сечения канала, в которой отсутствует жидкость, Sk - полная площадь поперечного сечения канала.
| СПОСОБ ГРАДУИРОВКИ И ПОВЕРКИ ЭЛЕКТРОМАГНИТНЫХ РАСХОДОМЕРОВ | 1999 |
|
RU2146042C1 |
| US 5369999 A1, 12.06.1994 | |||
| ЭЛЕКТРОМАГНИТНЫЙ РАСХОДОМЕР | 2000 |
|
RU2161778C1 |
| US 4932268 A, 12.06.1990 | |||
| УСТРОЙСТВО ДЛЯ СОРТИРОВКИ И УЧЕТА ЖИВОЙ РЫБЫ В ПОТОКЕ ВОДЫ | 1998 |
|
RU2137360C1 |
| УСТРОЙСТВО ДЛЯ ДЕМПФИРОВАНИЯ УДАРОВ | 2006 |
|
RU2309308C1 |

