Изобретение относится к измерительной технике и может быть использовано, например, для прецизионного измерения линейных и угловых перемещений.
Известен способ определения величины перемещения позиционируемого объекта с помощью емкостного датчика, состоящего из подвижного элемента (электрода), предназначенного для установки на позиционируемом объекте, и неподвижного элемента, состоящего из двух электродов, при котором в каждом положении позиционируемого объекта в процессе его перемещения определяют величину разности электрических емкостей промежутков между подвижным электродом и соответственно одним или другим неподвижными электродами, по полученной величине определяют величину перемещения позиционируемого объекта (описание изобретения к авторскому свидетельству СССР №1355858, опубл. 30.11.1987).
Главным недостатком известного способа является необходимость обеспечения большого, подчас недостижимого, динамического диапазона измерительной электронной схемы при измерении больших расстояний с высоким разрешением.
Наиболее близким к изобретению является способ определения величины перемещения позиционируемого объекта с помощью емкостного датчика, состоящего из подвижного элемента (электрода), предназначенного для установки на позиционируемом объекте, и неподвижного элемента, состоящего из двух групп секций, при котором в каждом положении позиционируемого объекта в процессе его перемещения определяют величину разности и суммы электрических емкостей промежутков между подвижным электродом и соответственно одной или другой группой секций неподвижного элемента, величину перемещения позиционируемого объекта определяют как отношение разности к сумме указанных электрических емкостей (описание изобретения к авторскому свидетельству СССР №1796880, опубл. 23.02.1993).
Недостатком известного является необходимость расположения границ каждого диапазона по измеряемой длине с точностью, не хуже допустимой погрешности измерений. Технологическое решение подобной задачи требует больших затрат, а подчас невыполнимо.
Предлагаемое изобретение решает задачу создания способа прецизионного измерения больших величин при их разбиении на диапазоны, обеспечивающего технический результат, заключающийся в существенном снижении требований к точности распределения границ секций и, следовательно, к снижению затрат на изготовление опорных неподвижных элементов.
Указанный технический результат обеспечивается в способе определения величины перемещения позиционируемого объекта с помощью емкостного датчика, состоящего из подвижного элемента, предназначенного для установки на позиционируемом объекте, и пространственно смещенных относительно друг друга, по меньшей мере, двух неподвижных элементов, параметры и расположение которых подобраны таким образом, что каждому положению позиционируемого объекта однозначно соответствует единственная величина электрической емкости между подвижным элементом и находящимся ближе, чем другие в соответствующем положении позиционируемого объекта неподвижным элементом, при котором в каждом положении позиционируемого объекта в процессе его перемещения определяют величину электрической емкости промежутка между подвижным элементом и находящимся ближе к нему одним из неподвижных элементов, по полученной величине электрической емкости в каждом положении позиционируемого объекта определяют координату положения позиционируемого объекта по ранее установленной зависимости величины электрической емкости промежутка между подвижным элементом и соответствующим неподвижным элементом от положения позиционируемого объекта, при этом величину перемещения определяют как разность координат промежуточного или конечного и начального положений позиционируемого объекта.
Технический результат достигается следующим образом. В предлагаемом способе определения величины перемещения позиционируемого объекта используется не один неподвижный элемент, разделенный на равные части - диапазоны, а, по крайней мере, два идентичных, расположенных параллельно и сдвинутых относительно друг друга по направлению измерения примерно на половину периода или половину ширины диапазона. Подвижный элемент выполнен с возможностью перемещения на величину максимального измеряемого расстояния вдоль направления измерения и взаимодействует одновременно с обоими неподвижными элементами. Измерительное устройство непрерывно измеряет величину перемещения подвижного элемента относительно начала отсчета внутри данного диапазона, например, первого неподвижного элемента. По достижении измеряемой величиной значения, приписываемого концу данного диапазона, управляющее устройство переключает систему на измерение положения подвижного элемента относительно второго неподвижного элемента, одновременно приписывая измеряемой величине значение, соответствующее началу следующего диапазона. Начало каждого диапазона выбирается таким образом, чтобы значение измеряемой величины, соответствующее началу диапазона, регистрировалось примерно на расстоянии 1/4 длины диапазона, а его конечное значение - на 3/4. Вследствие этой процедуры измерительная система обходит области границ диапазонов и, следовательно, погрешности в положении этих границ не влияют на точность измерений, а так как расположение неподвижных элементов жестко фиксировано относительно друг друга и в каждом диапазоне начальные значения задаются системой измерений (фактически каждый раз происходит установка нуля системы) погрешность не накапливается, что и обеспечивает высокую точность измерений в широком диапазоне.
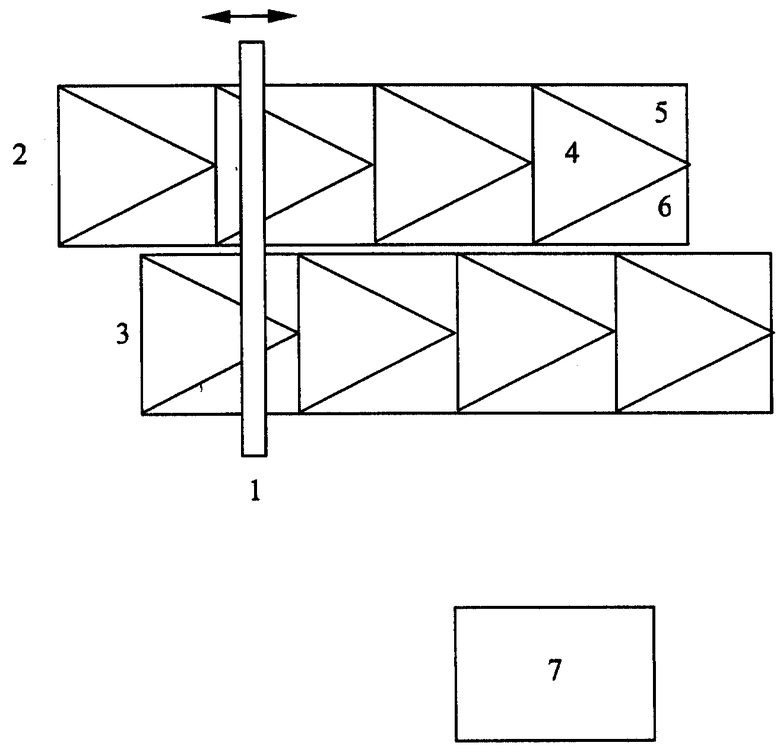
На чертеже изображено в качестве примера емкостное устройство для определения величины перемещения с неподвижными элементами, выполненными в виде электродов треугольной формы, реализующее предлагаемый способ.
Емкостное устройство для определения величины перемещения включает в себя емкостной датчик, состоящий из подвижного элемента 1, предназначенного для установки на позиционируемом объекте и пространственно смещенных относительно друг друга, по меньшей мере, двух неподвижных элементов 2 и 3, параметры и расположение которых подобраны таким образом, что каждому положению позиционируемого объекта однозначно соответствует единственная величина электрической емкости между подвижным элементом 1 и находящимся ближе, чем другие в соответствующем положении позиционируемого объекта неподвижным элементом 2 или 3.
Предлагаемый способ реализуется следующим образом.
В каждом положении позиционируемого объекта в процессе его перемещения определяют величину электрической емкости промежутка между подвижным элементом 1 и одним из неподвижных элементов 2 или 3, по полученной величине электрической емкости в каждом положении позиционируемого объекта определяют координату положения позиционируемого объекта по ранее установленной зависимости величины электрической емкости промежутка между подвижным элементом 1 и cоответствующим неподвижным элементом 2 или 3 от положения позиционируемого объекта.
Величину перемещения определяют как разность координат промежуточного или конечного и начального положений позиционируемого объекта.
Рассмотрим более подробно предлагаемый способ и средства, с помощью которых можно его реализовать.
Подвижный элемент (электрод) 1 можно выполнить просто в виде металлической пластины, ширина которой меньше ширины секции неподвижных элементов 2, 3. Неподвижные элементы 2 и 3 можно выполнить в виде диэлектрической пластины, покрытой металлом. Рабочая поверхность элементов 2 и 3 разделена на треугольные секции тонким линиями, на которых удалено металлическое покрытие. Таким образом каждая секция состоит из равнобедренного треугольного электрода 4 и двух треугольных электродов 5 и 6, сумма площадей которых равна площади треугольного электрода 4. Треугольные электроды 5 и 6 электрически соединены между собой и изолированы от треугольного электрода 4.
Измерительная схема 7 измеряет величину емкости промежутков, образованных парой подвижный электрод 1 - треугольный электрод 4 и парой подвижный электрод 1 - два треугольных электрода 5 и 6. Затем формируется разность измеренных значений. Так как при движении подвижного электрода 1, например, вправо площадь перекрытия первой пары уменьшается, а второй увеличивается, то полученное значение прямо пропорционально расстоянию между подвижным электродом 1 и началом секции. Форма секций неподвижных электродов 2 может быть самой различной.
Сложность заключается в том, что при измерении больших расстояний или при измерении с высокой точностью выходной сигнал изменяется в очень больших пределах, так, что его подчас невозможно обработать средствами современной электроники. Для того чтобы обойти эту трудность все измеряемое расстояние можно разбить на ряд диапазонов, каждый из которых представляет собой одну из секций неподвижного элемента 2 или 3. Трудность при этом заключается в том, что точность положения границ секций неподвижного элемента 2 или 3 должна соответствовать точности измерений (должна быть ей равна), что часто также невыполнимо.
Предлагается применить два одинаковых неподвижных элемента 2 и 3, расположенных рядом, но смещенных на величину, близкую к половине длины секции. Подвижный электрод 1 одинаково взаимодействует с обоими неподвижными элементами 2 и 3. Электронная схема 7 контролирует положение подвижного электрода 1 внутри секции по величине измеряемого сигнала. Допустим, что подвижный электрод 1 находится где-то посередине диапазона (секции) неподвижного электрода 2. Тогда на выход измерительной системы передается текущее значение сигнала от пары “подвижный электрод 1 - неподвижный электрод 2”. Этот сигнал, в частности, пропорционален разности емкостей между подвижным электродом 1 и сегментами (треугольниками) 4, 5 и 6 данной секции неподвижного электрода 2 и, следовательно, расстоянию между началом данного поддиапазона и текущей координатой подвижного электрода 1.
При приближении подвижного электрода 1 к концу данного диапазона, т.e. к моменту, когда могут начать сказываться погрешности границы, а именно, когда измеряемая величина достигнет значения, соответствующего конечному значению измеряемой величины в данном диапазоне, система переходит на работу с неподвижным элементом 3. Для этой пары подвижный электрод 1 оказывается далеко от области погрешностей - границы. Одновременно в момент переключения значению емкости подвижный электрод 1 - неподвижный электрод 3 присваивается нулевое значение. По достижении измеряемой величиной нового значения, соответствующего концу поддиапазона, система вернется на работу с неподвижным электродом 2, присвоив начальной величине нулевое значение. И так далее. Например, пусть диапазон изменений измеряемой величины составляет 1000 единиц и разбит на 10 поддиапазонов. Тогда при движении подвижного электрода 1 от начала координат (от нулевого значения), измеряемая величина будет увеличиваться. По достижении этой величиной значения 100 (длина секции должна быть выбрана такой, чтобы это событие произошло на расстоянии примерно 1/4 от конца поддиапазона) система переключится на работу со вторым неподвижным электродом, причем измеряемой в данный момент величине присваивается нулевое значение. Номер диапазона определяется последовательным подсчетом или иным способом.
Погрешности измерений в данном случае совершенно не зависят от точности положения границ диапазонов и определяются лишь точностью выполнения разделительных линий измерительных секций.
Применив неподвижные (условно) электроды в виде пар колец, разбитых на сегменты, точно таким же способом можно измерять углы, изменяющиеся в широком диапазоне значений, или углы с очень высокой разрешающей способностью.
Секции емкостного устройства для определения величины перемещения и средства, с помощью которых определяется величина перемещения, могут быть построены аналогично описанным в указанных выше описаниях к авторским свидетельствам СССР №1355858 и №1796880.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАНОМЕТРИЧЕСКОЕ ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО | 2002 |
|
RU2233736C2 |
| УСТРОЙСТВО ДЛЯ ПРЕЦИЗИОННОГО ИЗМЕРЕНИЯ РАССТОЯНИЙ | 2001 |
|
RU2221217C2 |
| УСТРОЙСТВО ДЛЯ ПРЕЦИЗИОННОГО ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЕМКОСТИ | 2001 |
|
RU2239200C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ МЕХАНИЧЕСКОГО НАГРУЖЕНИЯ В ЭНЕРГИЮ ЦИКЛИЧЕСКОГО ПЕРЕМЕЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2143170C1 |
| Емкостный датчик линейных перемещений | 1989 |
|
SU1626081A1 |
| ЕМКОСТНЫЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2010 |
|
RU2445633C1 |
| МАГНИТОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ (ВАРИАНТЫ) | 1997 |
|
RU2120177C1 |
| Емкостный дифференциальный датчик перемещений | 1988 |
|
SU1504493A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2011 |
|
RU2516207C2 |
| Емкостный измеритель перемещения | 1985 |
|
SU1252653A1 |
Изобретение относится к измерительной технике и может быть использовано для прецизионного измерения линейных и угловых перемещений. Способ определения величины перемещения позиционируемого объекта с помощью емкостного датчика, состоящего из подвижного элемента, предназначенного для установки на позиционируемом объекте, и пространственно смещенных относительно друг друга, выполненных с разбиением на секции, по меньшей мере, двух неподвижных элементов заключается в следующем. Начало каждой секции выбирается таким образом, чтобы значение измеряемой величины, соответствующее началу секции, регистрировалось примерно на расстоянии 1/4 длины секции, конечное значение регистрировалось примерно на расстоянии 3/4 длины секции. Параметры и расположение неподвижных элементов подобраны таким образом, что каждому положению позиционируемого объекта однозначно соответствует единственная величина электрической емкости между подвижным элементом и находящимся ближе, чем другие в соответствующем положении позиционируемого объекта, неподвижным элементом. В каждом положении позиционируемого объекта в процессе его перемещения определяют величину электрической емкости промежутка между подвижным элементом и находящимся ближе к нему одним из неподвижных элементов. По полученной величине электрической емкости в каждом положении позиционируемого объекта определяют координату положения позиционируемого объекта по ранее установленной зависимости величины электрической емкости промежутка между подвижным элементом и соответствующим неподвижным элементом от положения позиционируемого объекта. Величину перемещения определяют как разность координат промежуточного или конечного и начального положений позиционируемого объекта. Технический результат - обеспечение существенного снижения требований к точности распределения границ секций неподвижных элементов позиционируемого объекта, снижение затрат. 1 ил.
Способ определения величины перемещения позиционируемого объекта с помощью емкостного датчика, состоящего из подвижного элемента, предназначенного для установки на позиционируемом объекте, и пространственно смещенных относительно друг друга, выполненных с разбиением на секции, по меньшей мере, двух неподвижных элементов, при этом начало каждой секции выбирается таким образом, чтобы значение измеряемой величины, соответствующее началу секции, регистрировалось примерно на расстоянии 1/4 длины секции, конечное значение регистрировалось примерно на расстоянии 3/4 длины секции, параметры и расположение неподвижных элементов подобраны таким образом, что каждому положению позиционируемого объекта однозначно соответствует единственная величина электрической емкости между подвижным элементом и находящимся ближе, чем другие в соответствующем положении позиционируемого объекта, неподвижным элементом, при котором в каждом положении позиционируемого объекта в процессе его перемещения определяют величину электрической емкости промежутка между подвижным элементом и находящимся ближе к нему одним из неподвижных элементов, по полученной величине электрической емкости в каждом положении позиционируемого объекта определяют координату положения позиционируемого объекта по ранее установленной зависимости величины электрической емкости промежутка между подвижным элементом и соответствующим неподвижным элементом от положения позиционируемого объекта, при этом величину перемещения определяют как разность координат промежуточного или конечного и начального положений позиционируемого объекта.
| Емкостный дифференциальный преобразователь перемещений | 1991 |
|
SU1796880A1 |
| Емкостной датчик угловых перемещений | 1990 |
|
SU1776983A1 |
| Емкостной датчик перемещений | 1989 |
|
SU1696846A1 |
| Емкостное устройство для преобразования перемещения | 1986 |
|
SU1355858A1 |
| US 3860018 А, 14.01.1975. | |||

